


リラクタンスモーター
可変リラクタンスモーター は、拘束されていない鉄片が移動して、最小の磁気抵抗で磁束経路を完成させるという原理に基づいています。 、電気抵抗の磁気アナログ。
同期磁気抵抗
突極を備えた大型同期モーターの回転磁界がオフになった場合でも、同期トルクの10%または15%が発生します。これは、ローターの回転全体で磁気抵抗が変動するためです。大型の同期リラクタンスモーターの実用的なアプリケーションはありません。ただし、小さいサイズでは実用的です。
固定子スロットに対応する誘導電動機の無導体回転子にスロットが切り込まれている場合、同期リラクタンスモーター 結果。
誘導電動機として始動しますが、少量の同期トルクで動作します。同期トルクは、スロットが整列するにつれて、固定子から回転子を通る磁気経路の磁気抵抗の変化によるものです。
このモーターは、適度な同期トルクを発生させるための安価な手段です。低力率、低引き抜きトルク、低効率は、直接電力線駆動の可変リラクタンスモーターの特徴です。これが、半導体パワー制御が開発される前の1世紀にわたる可変リラクタンスモーターの状態でした。
スイッチドリラクタンス
極はあるが導体がない鉄製の回転子が多相固定子に取り付けられている場合、スイッチドリラクタンスモーター 、固定子フィールドと同期できる結果。固定子コイルの極のペアが通電されると、回転子は最も低い磁気抵抗経路に移動します(下の図)。
スイッチドリラクタンスモーターは、可変リラクタンスモーターとも呼ばれます。回転子の固定子磁束経路に対する磁気抵抗は、回転子の位置によって異なります。
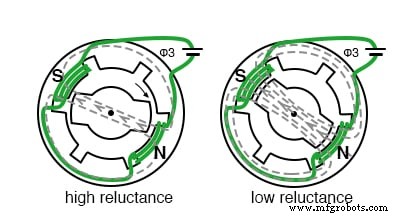
リラクタンスは、可変リラクタンスモーターのローター位置の関数です
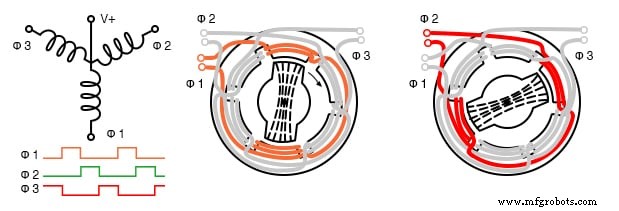
固定子相の順次切り替え(下の図)は、回転子をある位置から次の位置に移動します。磁束は、磁気抵抗が最も少ない経路を探します。以下は、過度に単純化されたローターと動作を示す波形です。
可変リラクタンスモーター、過度に単純化された操作
スイッチドリラクタンスモーターの各三相巻線の一端を共通のリード線で引き抜くと、ステッピングモーターのように動作を説明できます(上図)。他のコイル接続は、ウェーブドライブで、一度に1つずつ連続してグランドに引き込まれます。 パターン。これにより、ローターは60 °の時計回りに回転する磁場に引き付けられます。 増分。
さまざまな波形が可変リラクタンスモーターを駆動する場合があります(下図)。ウェーブドライブ(a)はシンプルで、シングルエンドのユニポーラスイッチのみが必要です。それは一方向にのみ切り替わるものです。より多くのトルクがバイポーラドライブ(b)によって提供されますが、バイポーラスイッチが必要です。
パワードライバーは、ハイとローを交互に引く必要があります。波形(aおよびb)は、可変リラクタンスモーターのステッピングモーターバージョンに適用できます。振動のないスムーズな動作のためには、正弦波(c)の6段階近似が望ましく、生成が容易です。
正弦波ドライブ(d)は、パルス幅変調器(PWM)によって生成されるか、電力線から引き出されます。
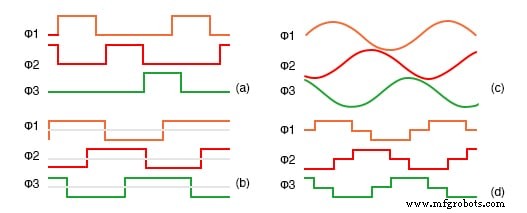
可変リラクタンスモーター駆動波形:(a)単極波駆動、(b)双極フルステップ(c)正弦波(d)双極6ステップ
固定子の極数を2倍にすると、回転速度が低下し、トルクが増加します。これにより、ギア減速ドライブが不要になる場合があります。個別のステップで移動し、停止し、開始することを目的とした可変リラクタンスモーターは、可変リラクタンスステッピングモーターです。
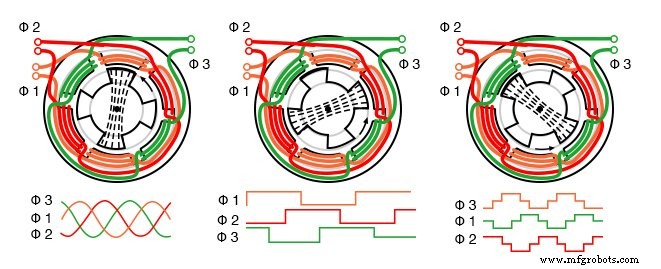
スムーズな回転が目標である場合、スイッチドリラクタンスモーターの電子駆動バージョンがあります。可変リラクタンスモーターまたはステッパーは、実際には下の図のようなローターを使用します。
電子駆動可変リラクタンスモーター
可変リラクタンスモーターは、直接電力線が駆動されている場合、パフォーマンスが低下します。ただし、マイクロプロセッサとソリッドステートパワードライブにより、このモーターは一部の大容量アプリケーションで経済的な高性能ソリューションになります。
制御は難しいですが、このモーターは回転しやすいです。界磁コイルを順次切り替えると、回転磁界が発生し、不規則な形状のローターを引きずって、磁気抵抗が最も低い経路を探します。
トルクと固定子電流の関係は非常に非線形であり、制御が困難です。
電子駆動可変リラクタンスモーター
電子駆動の可変リラクタンスモーター(下の図)は、永久磁石ローターのないブラシレスDCモーターに似ています。これにより、モーターがシンプルで安価になります。ただし、これは、ブラシレスDCモーターの場合ほど単純ではない電子制御のコストによって相殺されます。
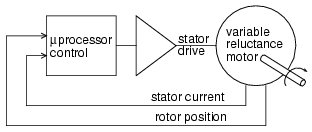
可変リラクタンスモーターはシンプルですが、誘導モーターよりもさらにシンプルですが、制御が困難です。電子制御はこの問題を解決し、モーターを電力線周波数の上下で駆動することを実用的にします。 サーボによって駆動される可変リラクタンスモーター 、電子フィードバックシステムは、トルクと速度を制御し、リップルトルクを最小限に抑えます。
電子駆動可変リラクタンスモーター
これは、ステッピングモーターに求められる高いリップルトルクの反対です。可変リラクタンスモーターは、ステッパーではなく、最小のリップルトルクで連続高速回転するように最適化されています。
光学式または磁気式エンコーダーのような回転式位置センサーで回転子位置を測定するか、固定子逆起電力の監視からこれを導き出す必要があります。マイクロプロセッサは、ソリッドステートデバイスを使用して適切なタイミングで巻線を切り替えるための複雑な計算を実行します。
これは、可聴ノイズとリップルトルクを最小限に抑えるために正確に行う必要があります。リップルトルクを最小にするには、巻線電流を監視および制御する必要があります。
厳格な駆動要件により、このモーターは、エネルギー効率の高い掃除機モーター、ファンモーター、ポンプモーターなどの大量のアプリケーションでのみ実用的です。そのような掃除機の1つは、コンパクトで高効率の電子駆動の100,000rpmファンモーターを使用しています。
モーターのシンプルさは、ドライブの電子機器のコストを補います。ブラシ、整流子、回転子巻線、永久磁石がないため、モーターの製造が簡単になります。
この電子駆動モーターの効率は高くなる可能性があります。ただし、大量の製造にのみ正当化される特殊な設計手法を使用して、かなりの最適化が必要です。
利点
- シンプルな構造-ブラシ、整流子、永久磁石がなく、ローターに銅やアルミニウムがありません。
- 従来のACまたはDCモーターと比較して高い効率と信頼性。
- 高い始動トルク。
- 大量のブラシレスDCモーターと比較して費用対効果が高い。
- 非常に高い周囲温度に適応できます。
- 音量が十分に大きければ、低コストで正確な速度制御が可能です。
短所
- 電流対トルクは非常に非線形です
- リップルトルクを最小限に抑えるには、位相切り替えを正確にする必要があります
- リップルトルクを最小限に抑えるために相電流を制御する必要があります
- 音響および電気ノイズ
- 複雑な制御の問題があるため、少量には適用されません
産業技術