


ステッピング モーターと DC モーターの違いについて
電気モーターは、電気エネルギーを機械エネルギーに変換する際に不可欠なコンポーネントです。ただし、すべてのモーターは同じ機能を実行しますが、適切なモーターを選択すると、最大のトルクを実現できます。したがって、この記事では、ステッピング モーターと DC モーターを区別します。また、サーボモーターの重要な特性を特定します。
ステッピング モーター
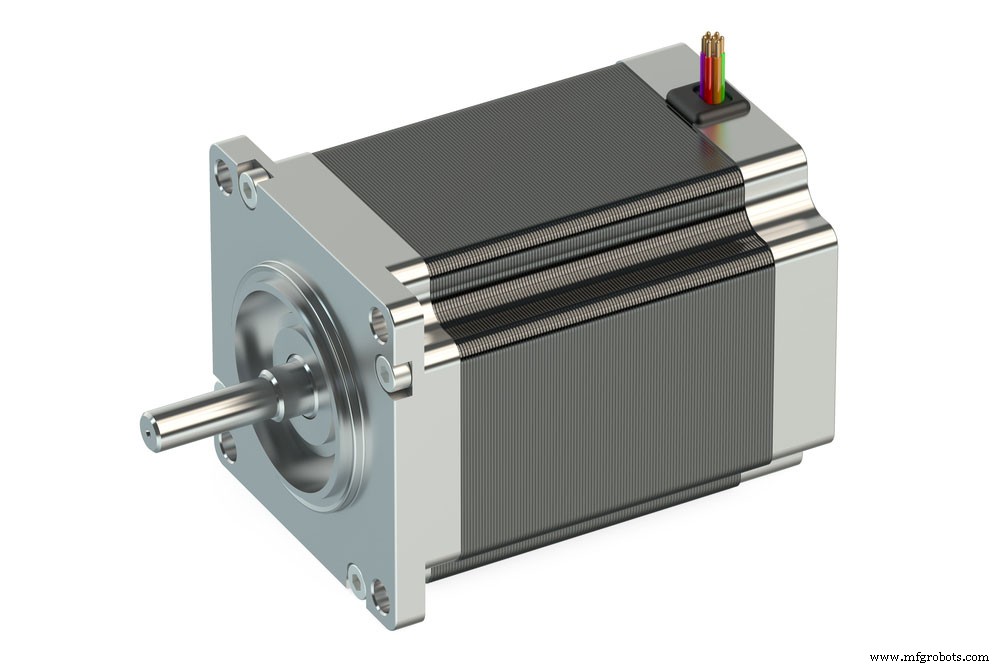
図 1:ステッピング モーター
定義
主に、個別のステップで回転するブラシレス DC モーターです。
また、コンピュータ制御のステッピングにより、極めて精密な速度制御と位置決めが可能です。したがって、ステッピング モーターは、精密なモーション コントロールの用途で人気があります。
コンポーネント
中央のギアを囲む複数の歯付き電磁石が特徴です。この配置は、位置を定義するのに便利です。また、永久磁石ステッピングモーターは直流電力を使用します。それにもかかわらず、DC モーターの代名詞であるブラシと機械式整流子がありません。したがって、ブラシレス DC モーターです。
動作原理
モーターは、電気パルスをドライバーに送信する制御システムを備えています。その後、ドライバーはインパルスを解読します。次に、比例電圧をモーターに送り返します。
次に、モーターは一定の角度増分で回転します。それがステッピングモーターという名前の由来です。また、交流電流がコイルの極性を制御することに注意してください。
利点と制限
ステッピング モーターの利点には次のようなものがあります。

図 2:金属 3D プリンター
- まず、X、Y プロッター、3D プリンターなどの正確な位置決めアプリケーションを容易にするのに便利です。
- また、回転速度を正確に制御できます。
- 第三に、低速での低トルクが特徴です。
- 最後に、コントロールが簡単です。
それらの基本的な制限には、
が含まれます。- モーターの効率が低い。無負荷時に最大電流を引き出します。
- また、モーターの回転数が高い場合、回転数が低い場合に比べてトルクが大幅に低下します。
- また、ほとんどの企業は、ポジションに関する不可欠なフィードバックを欠いています。使用中は比較的うるさいです。
- 最後に、高負荷で実行している場合、いくつかのステップをスキップできます。
アプリケーション
- 3D プリンター
- 医療画像アプリケーション
- 防犯カメラ
- ロボット工学
- CNC フライス盤
サーボ モーター

図 3:サーボ モーターの 3D イラストレーション
定義
DCタイプのモーターに属します。とはいえ、この同期モーターは長時間連続して動作するわけではありません。
コンポーネント
主に、このモーターはフィードバック システムに依存して、実際の速度と目的の速度の違いを検出します。したがって、フィードバックは、所望の位置からのドリフトを修正する際の出力の調整を容易にする。正確な位置決めを強化するのに便利です。
サーボには次の 2 種類があります。
連続回転モーター サーボ
それらは、時計回りまたは反時計回りの方向に連続的に回転できます。また、コマンド信号のガイドに従って、さまざまな速度範囲で移動できます。したがって、位置モータよりも幅広いアプリケーションに役立ちます。
位置回転サーボ
小規模なプロジェクトで中程度の正確な位置決めを実現するのに便利です。また、それらは 180 度の角度で回転し、連続回転や速度制御には役立ちません。
動作原理

図 4:サーボ モーター
内部モーターの設計は、内部モーターの高速を軽減するのに便利なギアの独自の配置を特徴としています。同時に、トルク出力が大幅に増加します。
したがって、サーボギアの設計と回転速度は、高トルクを生成するために不可欠です。また、注目に値するのは、サーボがエラー信号の修正に役立つマイクロコントローラーを備えていることです。これらの制御信号は、ローターを最終位置に移動するのに役立ちます。
ステッピング モーターと DC モーターの比較 – 利点と制限
サーボモータのメリット
- 高速回転時に高いトルク出力を発揮します。これは主に、ステッピング モーターの開ループ システムよりも優れた閉ループ フィードバック制御システムによるものです。
- また、幅広い定格トルクとサイズで利用できます
- 最後に、一部はプラスチック製であるため比較的安価であり、軽量でもあります。
サーボ モーターの欠点
- 定位置モーターには回転制限があります。それらは 180 度の角度でのみ回転できます。
- また、位置制御中のけいれんと同義です。これは主に、意図した位置からのずれを修正しようとするフィードバック メカニズムによるものです。
アプリケーション
- エレベーター技術とロボット工学
- 望遠鏡とカメラ
- 産業用制御アプリケーション
ステッピング モーターと DC モーター - DC モーター

図 5:多数の DC モーター
定義
それらは、電磁コイルと導体を備えたデバイスであり、その相互作用によって電気エネルギーが機械エネルギーに変換されます。一般的な DC モーターには、ブラシレス モーターとブラシ付きモーターの 2 種類があります。また、さまざまな DC モーターのサイズがあります。
コンポーネント
注目すべきことに、ブラシの名前は、モーターに巻線電流を供給する 2 つの固定金属ブラシに由来しています。他の主要コンポーネントには、静的固定子と回転電機子が含まれます
ステッピング モーターと DC モーターの違い - 動作原理
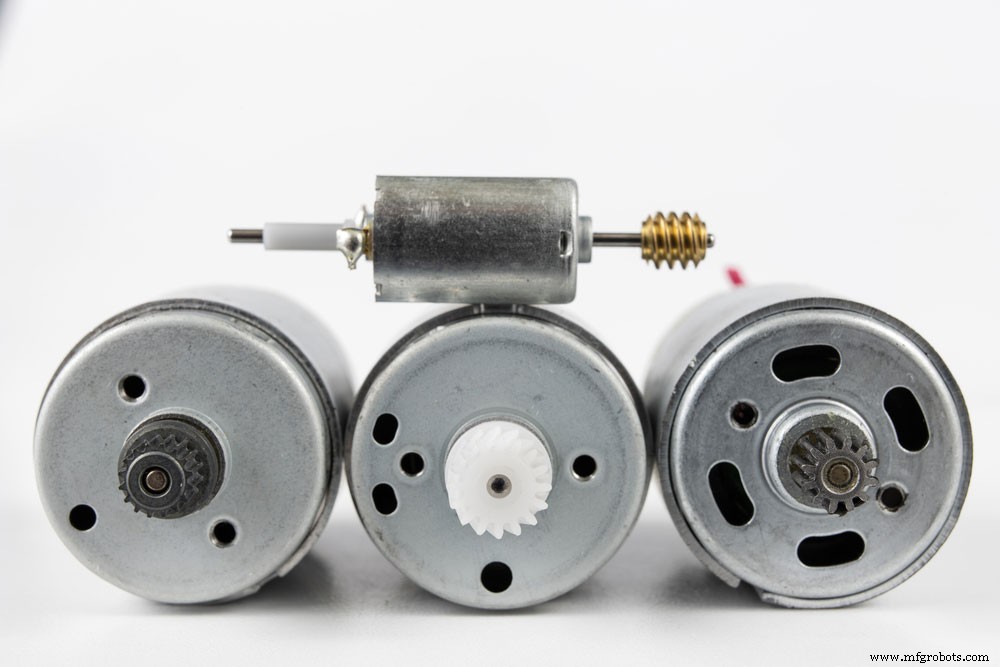
図 6:DC モーター
固定子は回転磁界を与え、電機子の回転を促します。また、一対の磁石は、コイルを囲むことによって電磁コイルを包み込むのに便利です。したがって、ワイヤの巻線電流が磁場を通過すると、力が誘導されます。次に、これがコイルの回転を開始します。
ステッピング モーターと DC モーターの比較 - ブラシ付き DC モーターの利点と制限
利点
- 必要なのは電圧をかけるだけなので、制御が簡単です。
- 第二に、比較的低速で高トルク出力を実現します。さらに、それらの機械的発電は約 75 ~ 80% の効率で高くなります。
- 比較的安価で手頃な価格です。
デメリット
- 回転時に電磁ノイズや物理ノイズが発生しやすい。
- また、モーターはブラシの裂け目や摩耗率が非常に高いため、定期的なメンテナンスが必要です。
アプリケーション
- 充電式ドリル
- 産業用途
- 携帯電話のバイブレーター
- 手持ち扇風機
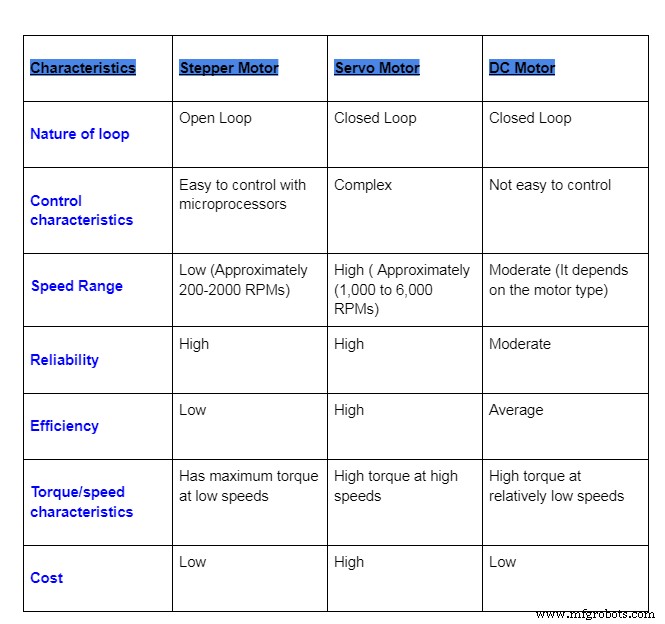
ステッピング モーターとサーボ モーターと DC モーターの違い
結論
一言で言えば、これら 3 つのモーターは、詳しく説明したように、さまざまな機能に適しています。これで、3 種類のモーターの主な違いがすべてわかりました。ただし、さらに明確にしたいことがある場合は、お問い合わせください。
産業技術