


ロボットの製造はテクノロジーによってどのように変化したか
はじめに:古いと感じるかもしれないという警告
私の名前は Steve Spano です。私の最初のエレクトロニクス プロジェクトは、4 歳のとき、バッテリー、2 本のワイヤ、および懐中電灯の電球を接続することでした。 6 歳から 16 歳くらいまで、Texas Instruments TI-994A、Commodore C64、Amiga 2000、IBM 386 などのコンピューターで、さまざまなプログラミング言語 (アセンブリ言語、基本言語、さらには C 言語) を独学で学びました。いくつかの Heathkit も作成しました。 「Solid State」無線受信機キットなどの電子プロジェクト。ヒースキットについて聞いたことがある人は何人いますか?

Heathkit HERO 1 ロボットが本当に欲しかったのです。超音波物体検出、可動アーム、8 ビットの中央処理装置を備えた驚くほど洗練されたロボットでした。 16 進数アセンブリで直接プログラムできるように、無線リモート キーパッドも付属しています。想像できますか?キーパッドを使用し、デバッガーをまったく使用せずに 16 進数で直接プログラミングしますか?ホラー!驚くべきことに、この小さなロボットは今でも Ebay で 1500 ドルで販売されています。私はそれを買わなければなりません – 私はずっと欲しかった – そしてそれはとてもかわいいです!

インターネットが登場する前の何年もの間、私は「Inter-Dimension」と呼ばれる 9600 ボーのモデムで「BBS」サービスを実行し、メッセージと Commodore/Amiga ソフトウェアを交換していました。当時の私のコンピュータの夢は、2,000 ドル (1995 年には 16 歳の子供にとって非常に大きな金額) を貯めて、Amiga 2000 用の 10 メガバイトのハード ドライブを購入することでした。最高のモデム ベースの BBS があればよかったのに!
私はペンシルベニア州スクラントン (米国) で育ち、電気工学の学校 (スクラントン大学) に通い、ニューヨーク州立大学で制御システムを専攻して EE の修士号を取得しました。放課後の私の最初の仕事である EE の仕事は、レジや小売りアプリケーションで使用されるサーマル プリンターのハードウェアを設計することでした。 1998 年の最初の EE の仕事での主なプロジェクトは、会社の製品を 8 ビット Intel CPU から 16 ビット メモリ バスを備えた真新しい 32 ビット 50 MHz プロセッサに更新することでした。これは、ソフトウェア、ハードウェア、および機械工学チームが関与する大規模なプロジェクトでした。私の 2 番目の EE の仕事は、ストレージ エリア ネットワーク システムを設計する会社で働いていました。これは 2001 年のことで、この会社の大きなプロジェクトは、真新しい 2 Gbit/s ファイバー チャネル インターフェイスをサポートする一連の SAN システムの設計を支援することでした。これは非常に高速で、2001 年には光ファイバーで 2Gbit/s でした。どうすればテクノロジーがそれよりも良くなるでしょうか??
シニア プロジェクト 1997
ElectronicsLovers ページについて知りました Instagramで、管理者はページで強調する「上級プロジェクト」の論文を探していました。日付が指定されていなかったので、1997 年の大学 4 年生のレポートを提出しようと思いました。主に、テクノロジーがどのように変化したかについての楽しいリマインダーとしてです。
1997 年にスクラントン大学で BSEE の学位を取得していたとき、私たちの 4 年生のプロジェクトは、迷路をナビゲートできる自律型ロボットを設計することでした。私はすぐにヒースキット HERO1 を思いつきました。今では、学校でロボットを作ろうと試みたり、はるかに高度なロボットを作ろうと試みたりすることができました。結局、Heathkit HERO1 は、4KB の RAM を備えた Motorola 6808 8 ビット CPU のみに基づいていました (サイドバー:現在の典型的な PCI-Express 1G ネットワーク カードには、パケット データだけのために 64KB から 256KB のバッファがあります)。
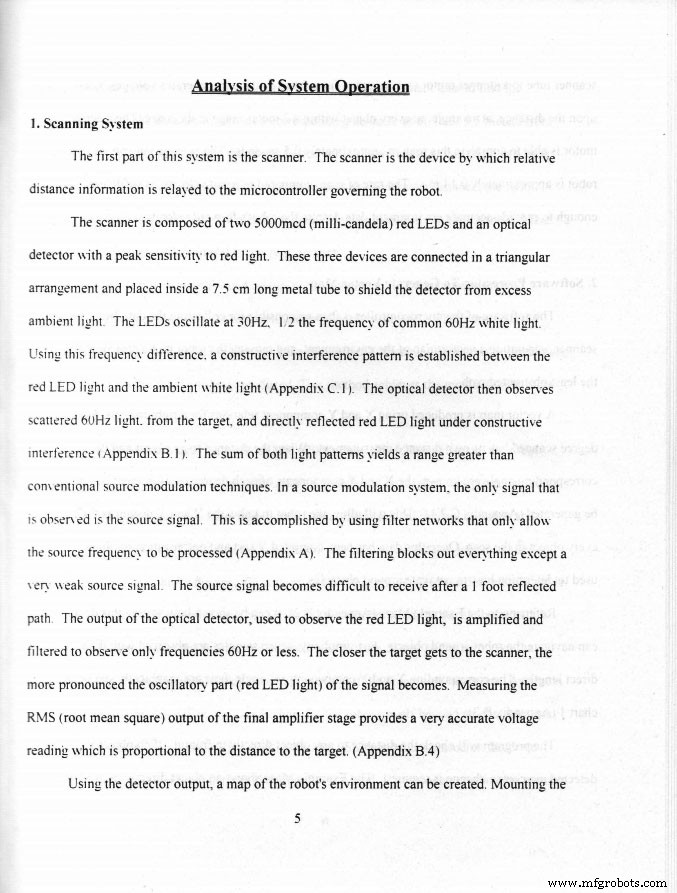
私のロボットの設計アーキテクチャは、はるかに高度な Intel 87x196KC を使用しました。これは、プログラム格納用に 32KB の内部 EEPROM メモリを提供する 16 ビット CPU でしたが、合計 512 バイトの RAM メモリしか提供しませんでした。 「C」コンパイラは非常に最適化されていないコードを生成したため、512 バイトのスタックを管理することは非常に困難でした。また、リアルタイム JTAG デバッガーやその他の種類のデバッガーはまったくありませんでした。ただし、CPU には内部シリアル/UART があり、これを使用して単純な文字出力を書き込んで、コードが何をしているかを判断できました。 RAM メモリが小さすぎるため、printf/sprintf への標準の「C」関数呼び出しは CPU でさえサポートされていませんでした。
ロボットの開発では、ロボットが部屋の中を動き回れるように、一連の 12VDC モーターを CPU で制御できるように、モーター制御 FET ドライバーなどのさまざまな回路が使用されました。レーザー LED、ミラー、および検出器を使用して、大まかな「Lidar」システムが構築されました。これにより、ロボットの前にある部屋の単純な「1 ビット」ビューを画像化することができました。私はまた、「イメージされた」という用語を非常に大まかに使用しています。障害物の「オン/オフ」の簡単なマップは、約 32 バイトのメモリに作成されました。次に、CPU コードは、ロボットが移動しようとしている迷路の隙間または壁に向かって移動しているかどうかを判断しようとします。競技中、ロボットは迷路をうまくナビゲートすることができました。私はロボットの設計に関する論文を書き、1997 年にジョージ ワシントン大学で開催された IEEE 学生論文コンペティションで第 2 位を獲得しました。ロボットは機能し、電気工学の学位を取得して卒業できました。
2018 年度シニア プロジェクト
私は最近、スクラントン大学に業界アドバイザーとして参加し、業界が必要とする可能性があるものと、今日のエンジニアリングの課題に関連するスキル/テクノロジーに基づいてコースのアイデアを提供するのを手伝いました。教授の 1 人に、ロボット プロジェクトと、学生が現在何をしているかについて尋ねました。
スクラントン大学では今でも工学系の学生を対象としたロボット コンテストを毎年開催していますが、現在は地域および全国的なコンテストになっています。学生が設計しているロボットは、何百倍も複雑です。現在のロボットは、Raspberry PI などの Arm9/Arm11 CPU を使用しています。学生たちは、Linux 上で動作する「C」コードを作成して、USB-HD カメラに直接接続し、ロボットで実際に想像できるようにしています。 Linux、Raspberry PI、および GIT と Google から利用できる豊富なオープン ソース プロジェクトを組み合わせることで、学生は画像検出および認識アルゴリズムにアクセスできるようになります。今日のロボット プロジェクトの開発中、学生はオープン ソース アルゴリズムをダウンロードし、リモート イーサネット モニターでデバッグして、すべての変数を確認し、コードをシングル ステップでデバッグできます。その後、学生は非常に巧妙なナビゲーション アルゴリズムの開発に多くの時間を費やして、競技中に自分のロボットをより有利にしようとします。
これを聞いたとき、私はすぐに「なんて不公平だ!」と答えました。私の時代には、画像全体を 32 バイトで保存し、提供されたわずか 512 バイトの RAM でもコードを実行できるように、スタック マネージャーを手作業でコーディングする必要がありました。もちろん、Raspberry PI は今日の技術の「ピーク」でさえありませんが、1997 年に利用可能だったどの製品よりもはるかに優れています。ハードウェアがより洗練されているだけでなく、デバッグおよび開発環境により、学生は設計に集中することができます。メモリの問題に苦しむのではなく。ただし、いくつかのことは同じままです。ロボット はまだ動かなければなりません。学生は一部のハイエンド CPU にアクセスできますが、12VDC モーターのオン/オフを切り替えるプロセスで 3.3v ポートを取得する必要があります。これにより、学生はトランジスタと FET の回路設計に戻り、これらの基本的なコンポーネントがどのように機能するかを学び、ロボットを動かすことができます。
私は微笑みながら、基本は今でも適用されていると言い、生徒たちはそれを認識しています。高度な電子機器は、依然として単一のトランジスタの基本的な動作に依存しています。おそらく、CPU の外側にある 1 つがモーターを作動させるか、CPU の内側に 5 兆個があり、画像とナビゲーション コードを処理します。
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
次は?
私の 3 番目の「仕事」は、現在も続いていますが、エレクトロニクスとソフトウェアのコンサルティング ビジネスを経営しています。私は 2001 年にコンサルティング ビジネスを始めましたが、仕事と予想外の活動でいっぱいでした。私は十数人を直接雇用しており、電源設計、プリンタ ドライバ、画像処理、ネットワーク アプライアンス、ハードディスク ドライブ、暗号化など、ハードウェアとソフトウェアのプロジェクトに携わってきました。技術項目 – ザイリンクス FPGA。
Kintex/Atrix シリーズなどの最新の FPGA デバイスは、ハードウェアとソフトウェア開発の最良の部分を組み合わせています。再構成可能なハードウェア、再構成可能なソフトウェア、および同時デバッグ。私が取り組んでいる特定のプロジェクトの 1 つは、質量分析計です。この特定の設計では、速度とデータ収集に関して多くの制約がありました。修正の一部は、「別のプロセッサ コアを追加するだけ」でした。まるで魔法のように、ハウスキーピング タスクとタイム クリティカルな機能の分割を可能にするデュアルコア デバイスによるシングル コア デバイス。 FPGA などの物理デバイスを追加のプロセッサ コアで再構成する機能は、1997 年には想像しがたいものでした。現在の FPGA デバイスでは、これをいつでも実行できます。
今年後半にスクラントン大学に戻り、現在の FPGA プロジェクトについて何人かの学生と話をする予定です。私は自分の仕事でそれらにもっと焦点を合わせます。おそらく将来的には、新しいエンジニアが新しいキャリアの最初の仕事を始めるときに、私が指導できるようになるでしょう。追記「スコア」は20年です。私はそれをもう一度見直さなければなりませんでした。私はエンジニアであり、英語専攻ではありません。
付録 A – My Robot Paper または
「How Times Have Changed」からの抜粋
この記事は Spano 氏によって書かれました。彼は親切にも私たちのチームの一員です。彼の伝記を読みたい場合は、ここをクリックしてください。
産業技術