


ジャイロスコープ
背景
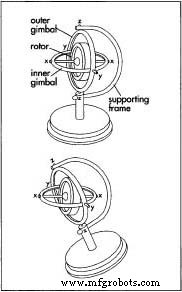
ジャイロスコープは見慣れたおもちゃで、見た目は一見シンプルで、子供たちにいくつかの機械的原理を紹介しますが、気づかないかもしれません。正確に機械加工された金属で作られた複雑なトップのようなもので、ジャイロスコープは、それぞれが異なる線または軸に沿って方向付けられた2つ以上の円形フレーム内に設置できるスピニングホイールです。フレームワークは任意の角度で傾けることができ、ホイールは回転している限り、その位置または姿勢を維持します。
しかし、ジャイロスコープは単なるおもちゃではありません。これは、多くの科学および輸送関連の機器の一部です。これらには、コンパス、空母などの大型船が波に乗って転がるのを防ぐ装置、飛行機や船の自動操縦装置、ミサイルや宇宙船を地球に対して誘導するシステム(つまり、 、慣性誘導システム)。
ジャイロスコープは、リングのフレームワークに取り付けられた中央のホイールまたはローターで構成されています。リングは適切にジンバル、またはジンバルリングと呼ばれます。ジンバルは、ホイールやその他の構造をサポートしているが、自由に動くことができるデバイスです。リング自体は、一端でスピンドルまたは軸に支持されており、ベースまたは機器の内部に取り付けることができます。空間内の元の方向を指すローターアクスルの特性は、ジャイロスコープ慣性と呼ばれます。慣性は、単に移動するオブジェクトが停止するまで移動し続けるという特性です。空気との摩擦により、最終的にジャイロスコープのホイールが遅くなり、その勢いが失われます。その後、車軸がぐらつき始めます。その慣性を維持するために、ジャイロスコープは高速で回転する必要があり、その質量はホイールのリムに向かって集中する必要があります。
歴史
ジャイロスコープは人気のある子供のおもちゃであるため、その祖先が世界最古のおもちゃの1つであるこまであることは当然のことです。シングルフレームジャイロスコープは、ジャイロトップと呼ばれることもあります。逆に、トップはフレームレスジャイロスコープです。 16世紀から18世紀にかけて、ガリレオ(1564-1642)、クリスティアーンホイヘンス(1629-1695)、アイザックニュートン卿(1642-1727)などの科学者は、回転とそれを説明する物理法則を理解するためにおもちゃのトップを使用しました。 1800年代のフランスでは、科学者のジャンベルナールレオンフーコー(1819-1868)が実験物理学を研究し、地球の自転を証明し、地球の表面を移動する物体の挙動への影響を説明しました。 1850年代に、フーコーはジンバルフレームに取り付けられたローターの動きを研究し、地球の自転にもかかわらず、糸車が宇宙で元の位置または向きを保持していることを証明しました。フーコーはローターに名前を付け、ギリシャ語のジャイロからジャイロスコープをジンバルします。 および skopien 「回転」と「見る」という意味です。
発明者がジャイロスコープの用途を見つけたのは1900年代初頭まででした。ドイツのエンジニア兼発明者であるHermannAnschiutz-Kaempfeは、ジャイロスコープの安定した向きをジャイロコンパスで使用できることを認識しました。彼は、通常のナビゲーションおよびオリエンテーションシステムが実用的でない海底探査用の潜水艇で使用するためのジャイロコンパスを開発しました。 1906年、オットーシュリックは、ドイツの魚雷艇シーバーで高速回転ローターを備えたジャイロスコープをテストしました。 海は魚雷艇を両側に15°、または合計30°回転させました。彼のジャイロスコープが全速力で操作されたとき、ボートは合計1°未満しか転がりませんでした。
米国では、電気機関車と機械のトランスミッションの開発における業績で有名な発明家であるエルマーアンブローズスペリー(1860-1930)が、米国の戦艦デラウェアに設置されたジャイロコンパスを発表しました。 1911年。1909年に、彼は最初の自動操縦装置を開発しました。これは、ジャイロスコープの方向感覚を使用して飛行機の進路を維持します。 AnschiützCompanyは、1916年にデンマークの客船に3フレームのジャイロスコープをベースにした最初の自動操縦装置を設置しました。その年、航空機の人工地平線も設計されました。人工水平儀は、雲やその他の状況で目に見える水平儀が消えたときに、飛行機がどのように回転(左右に移動)またはピッチング(前後に移動)するかをパイロットに伝えます。
船にもロールリダクションが必要でした。スペリー社は1915年に2フレームのジャイロスコープを使用したジャイロスタビライザーを導入しました。海上での船の横揺れは乗客を船酔いさせ、貨物を移動させて損傷を与え、船体に応力を引き起こします。スペリーのジャイロスタビライザーは重く、高価で、船の多くのスペースを占めていました。日本人が船を安定させるための水中フィンを考案した1925年に廃止されました。
第二次世界大戦前と第二次世界大戦中のミサイルシステムと飛行爆弾の激しい開発の間、2フレームのジャイロスコープは3フレームの計器とペアになり、それぞれロールとピッチの動きを修正し、自動操舵を提供しました。ドイツ人は、V-1飛行爆弾、V-2ロケット、およびパイロットレス飛行機でこの組み合わせを使用しました。 V-2は初期の弾道ミサイルと見なされています。軌道を回る宇宙船は、ナビゲーションシステムに小型のジャイロスコープで安定化されたプラットフォームを使用しています。安定性を維持し、非常に高い精度で方向を定義するジャイロスコープのこの特性は、照準器、爆撃照準器、および銃とレーダーをサポートする船上プラットフォームに適用されています。これらのメカニズムの多くは第二次世界大戦中に大幅に改善され、宇宙船にジャイロスコープを使用する慣性航法システムは、宇宙探査がますます重要になる1950年代に発明され完成されました。
原材料
ジャイロスコープの製造に使用される材料は、ジャイロスコープの設計と目的に応じて、比較的単純なものから非常に複雑なものまでさまざまです。いくつかは最高級の時計よりも正確に作られています。それらは、小さなボールベアリング、貴重な宝石の磨かれた斑点、または空気やガスの薄膜で回転する可能性があります。電流によって完全に吊り下げられた真空中で動作するものもあるため、何にも触れず、摩擦も発生しません。
電動モーターと金属ジンバルを備えたジャイロスコープには、4つの基本的なコンポーネントセットがあります。これらは、モーター、電気部品、プログラムされた操作用の電子回路カード、および車軸とジンバルリングです。ほとんどのメーカーは、下請け業者からモーターと電気および電子部品を購入しています。これらは在庫品の場合もあれば、ジャイロスコープメーカーからサプライヤーに提供された一連の仕様に従って製造される場合もあります。通常、ジャイロスコープのメーカーは独自のジンバルと車軸を機械加工しています。アルミニウムはその膨張特性と強度特性のために好ましい金属ですが、より洗練されたジャイロスコープはチタンで作られています。金属は棒材としてまとめて購入され、機械加工されます。
デザイン
ジャイロスコープ理論の電気的および機械的側面をガイドとして使用して、エンジニアはジンバルのホイールデザインを選択し、デザインに適した金属ストックを選択します。ジャイロスコープの多くの用途の設計はかなり標準的です。つまり、新しいラインの再設計または設計は、最も基本的な最初から新しい製品を作成するのではなく、既存の設計を新しい用途に適合させることです。ただし、設計には、最も基本的なエンジニアリング手法の遵守が含まれます。公差、クリアランス、および電子アプリケーションは非常に正確です。たとえば、ジンバルホイールの設計とそれらの機械加工の設計では、誤差に対する許容度が非常に小さくなっています。ジンバルの断面は全体で均一でなければなりません。そうでないと、ジャイロスコープのバランスが崩れます。
製造プロセス
- ジンバルとジンバルフレームは、アルミニウム棒材から機械加工されています。
 ジャイロスコープの例。設計プロセスの一部として開発されたツール。それらは磨かれ、洗浄され、組み立てられるまでビンに保管されます。組み立ての場合、ビンは組み立てラインに沿った適切な場所に移動されます。
ジャイロスコープの例。設計プロセスの一部として開発されたツール。それらは磨かれ、洗浄され、組み立てられるまでビンに保管されます。組み立ての場合、ビンは組み立てラインに沿った適切な場所に移動されます。 - ジャイロスコープは、自動化よりも「タッチレイバー」の重要性を強調する簡単な組立ラインプロセスで製造されています。ジャイロスコープは裏返しに組み立てられます。モーターはジャイロスコープの心臓部であり、最初に取り付けられます。 「典型的な」ジャイロスコープモーターは、毎分24,000回転(rpm)で回転するように同期されます。完全に同期している必要があり、モーターは通常、組み立て前にベンチテストされます。電気接続がモーターに追加されます。
- 次に、内側のジンバルから外側のジンバルフレームまで、ジンバルとフレームを組み立てます。ベアリングが配置されます。ベアリングの「エンドプレイ」(はめあいの緩み)は、通常、0.0002〜0.0008インチ(0.006〜0.024 mm)の非常に小さな公差を持っています。
- 最も外側の電気接続が組立ラインに接続され、回路カードが追加されます。最後に、ジャイロスコープは組み立てプロセスの最後に校正されます。ベアリングのサスペンションとキャリブレーションは手作業でチェックされます。メーカーは、キャリブレーションの場合でも、人間による観察、テスト、および修正が自動化された方法よりも信頼できることを発見しました。
ジャイロスコープは、物理学の単純な原理を応用したエレガントな例です。シンプルなため、メーカーは独自の技術を厳重に保護しています。ジャイロスコープは幅広い用途のシンプルなデバイスであるため、より多くの製造プロセスを必要とするものもあります。上記の製造ステップには約10時間かかり、ミサイル誘導などのアプリケーション用に無料のジャイロスコープが作成されます。よりエキゾチックなジャイロスコープは、40時間の組み立て時間を必要とする場合があります。
品質管理
機器は有人航空機、無人ミサイル、および故障した場合に大惨事を引き起こす可能性のあるその他の輸送および兵器装置の一部であるため、ジャイロスコープの製造における設計および組み立てプロセス全体で品質管理が不可欠です。エンジニア、科学者、および設計者は、雇用される前および仕事中に高度な教育と訓練を受けています。組立ラインの労働者は、雇用されるために初期トレーニングに合格する必要があり、定期的に継続的なトレーニングセッションをスケジュールしています。ジャイロスコープの製造で満たさなければならない品質基準の多くは測定できるため、製造中は工程内検査が行われます。最高レベルの品質管理は、社外の検査官が行い、政府の検査官も含まれます。顧客はまた、独自の検査と受け入れテストを実行します。メーカーの製品が顧客のテストに失敗した場合、失敗したジャイロスコープが返されます。
副産物/廃棄物
ジャイロスコープのメーカーは副産物を生産していませんが、さまざまな用途向けにジャイロスコープのフルラインを製造する傾向があります。それらはまた多くの無駄を生み出しません。ジンバルとリングを機械加工すると、いくつかのアルミニウムチップが生成されますが、これらは収集され、リサイクルのためにアルミニウムサプライヤーに返送されます。
安全上の懸念
製造業者は、光、換気、および人間工学(反復運動過多損傷の可能性を低減する快適な座席と作業台)に関する労働安全衛生局(OSHA)の義務を順守しています。静電気放電を防ぐために、プラント内の湿度を維持する必要があります。少量の洗浄溶剤が必要ですが、良性(無害)の柑橘系クリーナーが使用されています。
未来
ジャイロスコープの使用は、ガイダンスと制御を必要とするデバイスの数とともに増加しています。ジャイロスコープの基本は物理法則に基づいており、変更することはできませんが、技術は進化しています。ジャイロスコープを機能させる回転質量を提供するための機械的および電気的方法は、リングレーザーとマイクロテクノロジーに徐々に置き換えられています。細い光ファイバーのコイルは、自動車のナビゲーションシステムに応用できるコンパクトで軽量なジャイロスコープの鍵を握っています。ジャイロスコープは、輸送、探査、および産業における非常に多くのツールのバランスを保つための非常にシンプルで洗練された機器であり、目に見えても見えなくても、確かに将来の場所があります。
製造プロセス