


SnowPlow Robot
コンポーネントと消耗品
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
このプロジェクトについて
なぜスノープラウロボットを作りたかったのですか?私は生活を楽にするための解決策に鈍感ではないので、人々が冬の寒さや従来の手動ショベルを使用することの疲労を回避するのに役立つ解決策を作成して提案するというアイデアを検討しました歩道から雪を取り除きます。そのために、楽しくて技術的なものを選びました。このようにして、強力な機構、制御電子機器、強力な電気モーターを備えた、遠隔操作の除雪機ロボットの開発を開始することにしました。その結果、キャタピラー、電動ブレード(持ち上げたり移動したりできる)、および暗闇の中で道を照らすために上部に取り付けられたライトプロジェクターを備えた本物の除雪車のミニチュアバージョンができました。ロボットはPlayStationのリモコンで遠隔操作できます。
次のビデオでは、除雪機ロボットの動作を見ることができます。除雪機ロボットをシャベルで切るには、ランナップを実行する必要があるようです。そうではありません 、雪がどのように取り除かれるかを示すビデオを作成しました。
どのように作られていますか?
ロボットは、電動ブレード(持ち上げたり動かしたりできる)を支えるフレームと、電気モーター、ホイール、キャタピラートラックで構成される牽引システムで構成されています。シャーシは、長方形のセクションの鉄の棒が溶接されて実現されています。ロボットのサイズはブレードを除いて600X375X240mmで、重量は約30kgです。
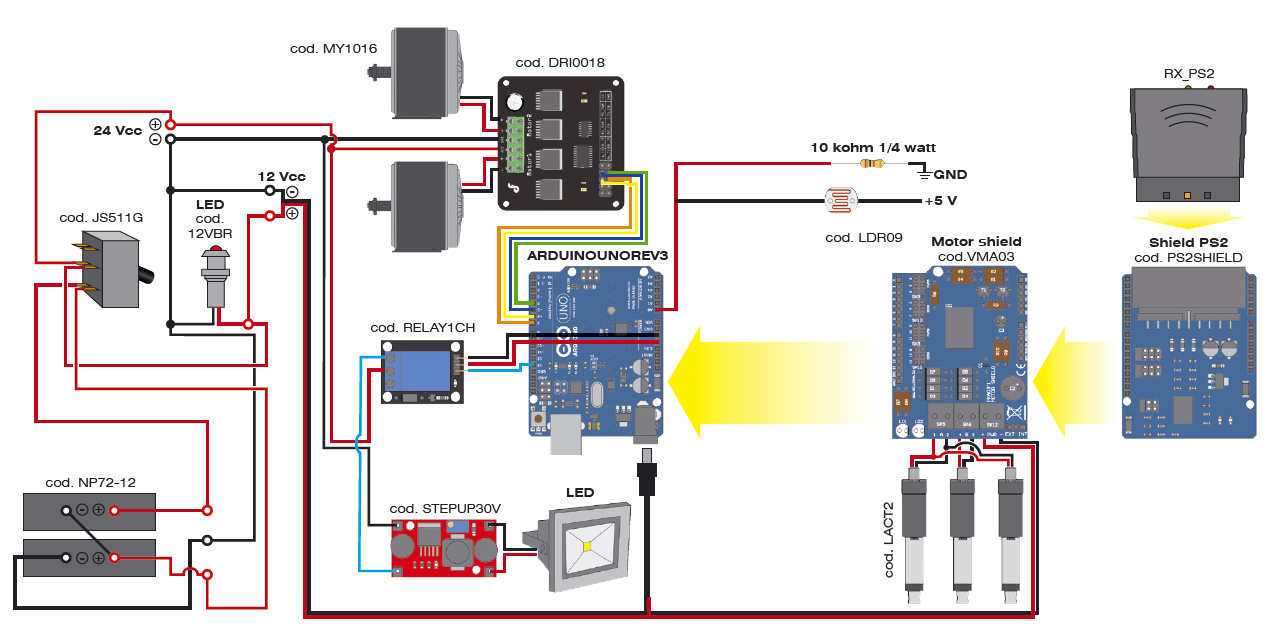

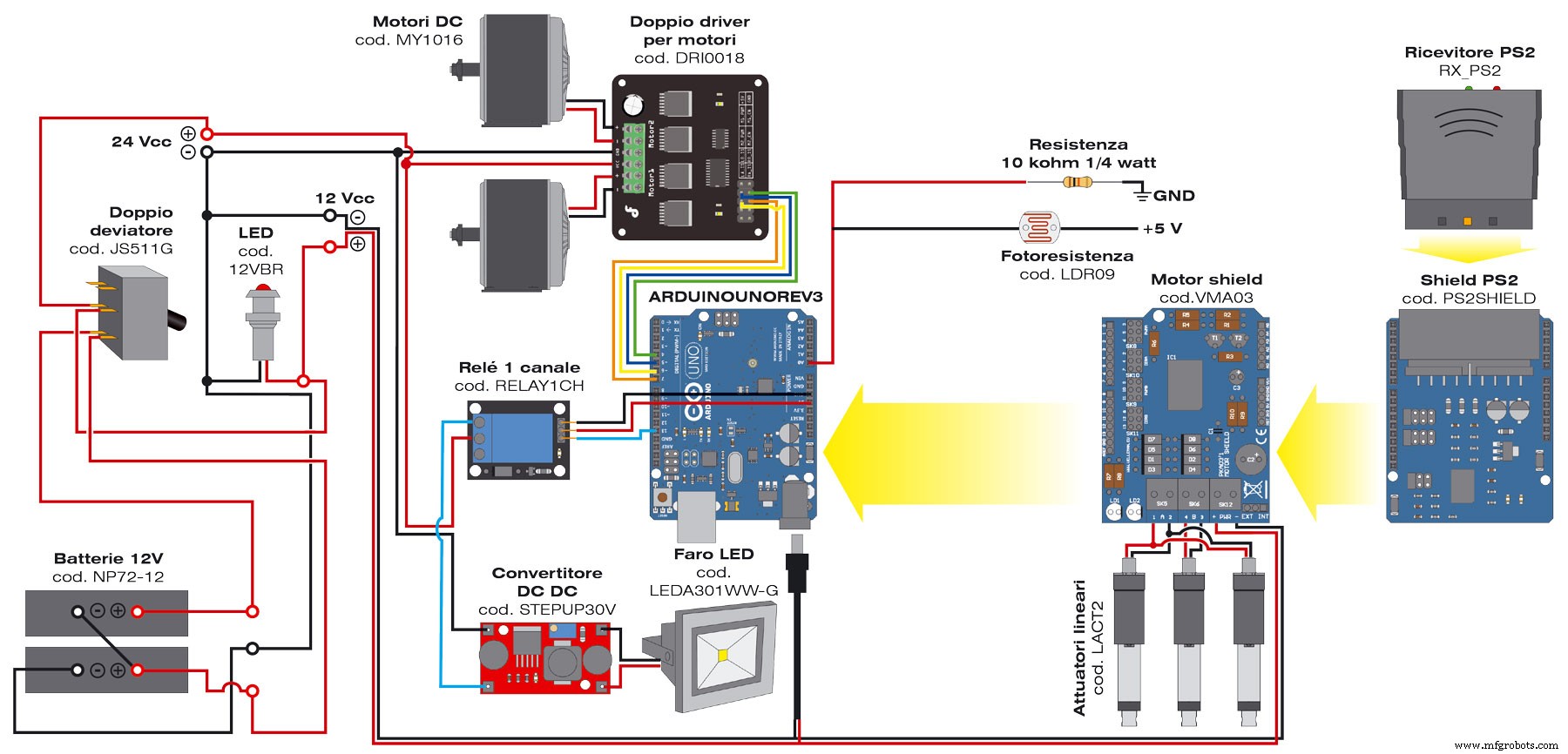
除雪機の電気的および電子的部分はArduinoUnoに基づいており、3つのシールドをホストし、以下とインターフェースします。
- モータードライバー
- リレーボードチャネル
- DC / DCコンバータのステップアップ
Arduinoに搭載されているシールドは、ブレードの動きを管理する3つのリニアモーターを制御するモーターシールドと、PlayStation 2(PS2)とのインターフェースを可能にするPS2SHIELDです。後者には、前述のコンソールから特定のコマンドを送受信するための2.4GHz無線受信機であるRX-PS2が必要です。ロボットの配線図は、これらのページにあります。電源は7.2Ahの一連の2つの鉛ゲル電池で作られています。2つの中間点接続から12Vを取り、一連の負と正の間で24ボルトを取ります。スイッチ(125V、2×15アンペア)が2つの供給ラインを制御します。 12ボルトで、Arduinoを実行します。これは、ピンストリップを介してシールドに電力を供給します。 LED(制限抵抗を内部に取り付ける)は、Arduinoが実行されていることを示します。
バッテリースタックから直接供給される12ボルトは、モーターシールドの電源セクションにも電力を供給しています。実際、3つのリニアアクチュエータ(コードLACT2)の吸収が高いため、Arduinoから12Vを取得することはお勧めできません。適切なPWR端子に外部電源を供給することを選択します。外部電源を使用するには、端子の近く、中央とEXTの間でジャンパー(シールド上)を移動する必要があります。シールドの管理には、コンポーネントに付属のArduino用の特別なライブラリが必要です。各リニアアクチュエータは、ウォームスクリューを使用してシャフトをその長さに沿って前後に動かす12 Vdcギアモーターで構成されています(最大5cmの可動域)。
アクチュエータの動的負荷は50kgで、最高速度は1.3 cm / sです。動かないときは最大約250kgまで支えることができ、トルクは力がなくてもシャフトの位置を維持します。 2つのリミットスイッチは、エンジンが最大の伸縮に達したときに停止するように提供し、ダイオードは、限界点に達した後に逆方向を許可します。アクチュエータは金属製で、ほこりや水から保護するために密閉されています(IP63定格)。
ここで、除雪車の動力部分であるトラクションとプロジェクター(オプション)セクションに給電している24ボルトの供給ラインに目を向けましょう。最初のラインはモータードライバーに基づいており、4本のワイヤーで接続されています。同数のArduinoデジタル回線。モータードライバーは、最大35VDCの電圧と15Aの電流(それぞれ)で2つのブラシ付きモーターを連続して駆動できるダブルブリッジパワードライバーです。
Arduinoとインターフェースし、4つのデジタルI / O(2 PWM)のみを使用することで、モーターの回転方向と速度を選択できます。回路には、4つの制御ピン、モーターの回転方向を示す4つのLED、ボード電源(5 Vdc)用の2つのピン、およびプリント回路の背面にある2つのアルミニウムヒートシンクがあり、動作中に発生する熱を放散するために必要です。フルパワーで。
Arduinoによるドライバーの管理のために、メーカーは特別なライブラリを提供しています。出力端子台を使用すると、2つのエンジンを接続して、図に示すように接続できます(極性を反転しないでください。極性を反転しないと、トラックが逆方向に走ります)。断面積が1.5平方mm以上のケーブルを使用します。制御入力については、Arduinoとコントローラーコネクタピッチ2.54の間の接続を尊重する必要があります。メーカーが提供するライブラリとファームウェアを使用する際に必要な対応:編集する場合は、接続を修正する必要があります。
DIRはモーターの回転方向を設定するための論理レベルであり、PWMはパワードライバーに命令するためのPWM信号であることを忘れないでください。コントローラコネクタの接点を特定するには、回路基板のコンポーネント側でその横に表示されているシルクスクリーンを参照するだけで十分です。エンジンコントローラーに加えて、24ボルトはLEDプロジェクターのセクションに電力を供給します。マウントするかどうかは関係ありません。取り付けられている場合は、配線が示され、リレーカード(コードRELAY1CH)から正の24Vを取得することを忘れないでください。後者は、デジタルI / O13を介してArduinoによって制御されるリレーとそれぞれのドライブトランジスタを収容します。 Arduinoは、+ 5Vとグランド(GND)を使用してカードにも電力を供給します。
リレーを使用すると、対応する回路のアクションをターゲットにして、プロジェクターのオンとオフを切り替えることができます。プロジェクターは220Vacで動作するように設計されていますが、この電圧はロボットでは利用できないため、インバーターの使用を避けるために、プロジェクターを開き、AC / DCを取り外し、電源LEDの2本のワイヤーを直接持ってくることでプロジェクターを変更しましたコンバーターの出力へDC / DC(コードSTEPUP30V);後者は調整可能な出力電圧を備えたスイッチングコンバータであり、LEDに約10ワットで動作するように電流を供給するために調整する必要があります。通常、これは約30ボルトで達成されます。ただし、電力は積VxIによって与えられることを忘れないでください(電圧による電流、ワット単位は、Vがボルト単位でIがアンペア単位の場合に得られます)、30 Vまで、消費電流は340mAをわずかに下回る必要があります。 LEDのグループは内部で過電流から保護されていますが、STEPUP30Vには出力電流が2Aに制限されているため、出力電流制限を備えたDC / DCと交換すると便利です。
リモコンからのデータの受信は、シールドPS2SHIELDによって行われる作業であり、製造元は特定のライブラリを利用できるようにしています。シールドは、コマンドの受信とデコードを実行します。無線部分はRX_PS2に残され、RX_PS2は関連するコネクタに挿入されます。最後に注意するのは、Arduinoが周囲の照明を検出し、LEDプロジェクターがオンになるようにボードRELAY1CHを制御するために使用するフォトレジスターです。コンポーネントは10kOhm(1/4 W)の抵抗によって分圧器に供給され、アナログ入力A0Arduinoから読み取られます。 5ボルトはArduino5Vから取得されます。この光センサーは単純なことを行います。良好な照明条件では、フォトレジスターの抵抗が低く、ArduinoマイクロコントローラーのADCによって読み取られる電圧が低く、リレーボードをトリガーしません。代わりに、暗闇は抵抗を大幅に増加させ、ADCは5ボルトに近い電圧を読み取ります。これにより、プロジェクターがオンになります。
構築手順
クイックガイド
コード
- スケッチ
スケッチ Arduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
回路図
製造プロセス