


歩行二足歩行のWalbi
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
いくつかのサーボを備えた二足歩行ロボットを作ることができたら素晴らしいと思いませんか?インナーオタクはそう思いました、そしてこれは結果です…
それがWalbi、WALink BIpedです。これは、機械学習プロジェクトのために作成したロボットで、地面から降りることはありませんでした(Walbiもそうではありませんでしたが、両足がしっかりと地面に植えられているためです)。
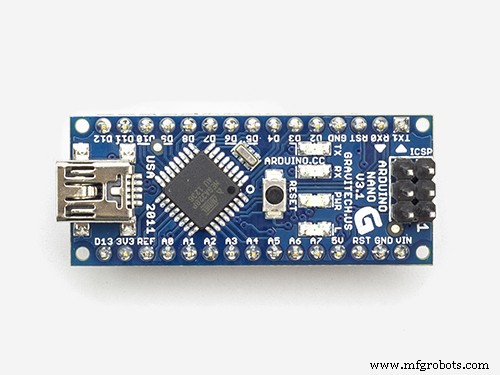
Walbiは、「脳」にArduino Nanoを使用し、「筋肉」にLX-16Aサーボを使用し、「骨」にプラスチックの3Dプリントパーツを使用しています。 LewanSoul LX-16Aサーボは、小型(っぽい)ロボットプロジェクト向けの夢のサーボです。軽量で、19 kg.cm以上移動でき、サーボからサーボまでの1本のケーブルで接続されているため、ロボットの子供用ケーブルを接続できます。再生します。
Walbiは2:1スケールのヒューマノイドであり、その脚はかかとから腰まで55 cm(21.7インチ)の高さで、重さは1、1 Kg(2.4ポンド)です。ボディの白い部分は3Dプリントされていますが、軽量で頑丈な木材で簡単に作ることができます。
Walbiのプログラミングはとても簡単です。モーションキャプチャと再生を行うために必要な2つのプログラムを以下からダウンロードして、Walbiを歩いたり、這ったり、登ったり、ジャンプしたり、踊ったりすることができます。足を目的のポーズに移動し、そのポーズを記録し、Walbiを別のポーズに形作り、記録するなどの操作を行うだけで、完全なシーケンスを記録したら、座って上手にパフォーマンスを見ることができます。あなたが教えた動き。
多分あなたはリバーダンスにあなたを教えることができます😀
Walbiの構築
Walbiは、FlashForge Creator Proプリンターを使用して、PLAプラスチックで3Dプリントされました。 ThingiverseからSTLファイルをダウンロードするか、別の方法を使用して、木または金属を使用して足、脚の「骨」、および腰を作成できます。サーボサポートは、これらの部品、サーボ、および相互に接続します。
印刷されたパーツと相互にサーボを取り付けるには、4つの異なるタイプの金属サポートが必要になります(詳細と写真は、Release The Inner Gookブログで入手できます)。
配線
LX-16Aサーボを制御するには、LewanSoulデバッグボードが必要です。
ArduinoNanoのシリアルポートからコマンドを受信します。 Arduinoのハードウェアシリアルを使用してコンピューターと通信したため、デバッグボードに接続するために、SoftwareSerialライブラリを使用してNanoに2番目のシリアルポートを作成しました。
シリアルサーボにより配線を最小限に抑えます。各サーボから次のサーボへのケーブル(サーボに付属のシリアルケーブル)があり、ウエストのサーボはデバッグボードに直接接続されています。コンピューターはArduinoのUSBポートに接続し、ArduinoはSoftwareSerial用に構成したArduinoピンに接続された3本のジャンパー線(TX、RX、GND)を使用してデバッグボードに接続されます。コード1ではピン10と1を使用しました。 。
サーボは115200のボーレートを使用します(これは高すぎるため、変更方法を知っている場合はお知らせください)。 SoftwareSerialのこのボーレートは高いため、エラーチェックと再試行機能を実装する必要がありました。場合によっては、正しい読み取り値を取得するために永続性が必要でした。
パワー
サーボは7.4vで19.5kg.cmを提供できます。 6vを使用しましたが、ストール電流は3アンペア未満でした。
プログラミング
ArduinoコードはプロジェクトのGithubリポジトリで入手できます。
モーションキャプチャとリプレイには2つのプログラムが使用されます。これは、映画で使用されているものと同様の手法です。まず、ロボットをポーズに成形します。サーボはデフォルトでモーターオフになっているため、手動でサーボを回転させることができます。ロボットを目的のポーズにした後、Walbi_recordプログラムを使用して、すべてのサーボ角度を読み取り、表示します。次に、これらの角度の読み取り値をWalbi_playのposeAngles変数にフィードし、プログラムを使用して、timeToMove変数を使用して設定された速度(ミリ秒単位)で、記録されたポーズのシーケンスを再生します。
プロジェクトを楽しんでいただけたでしょうか。コメントを残したり、ブログを購読したり、その他の種類のフィードバックアクションを行ったりして、自由に愛を分かち合ってください。感謝します。
インナーオタクナゲッツ
Walbiの作成中に学んだヒントとコツは次のとおりです。
- LX-16Aのサポートは、サーボに1つの位置でしか取り付けられないため、特に3Dプリントされた部品に誤って接続するのは非常に簡単です。見つけるのが非常に困難だった組み立てミスを修正するために、Walbiを数回再組み立てする必要がありました。
- サーボにはデフォルトでID1が付属しています。ロボットに取り付ける前に、各サーボに異なるIDを割り当ててください。そうしないと、同じIDを持つ複数の接続されたシリアルサーボと通信できなくなります。
- ケーブルタイを使用すると、外観が大幅に向上します
- サーボには、ホーンをサーボに接続し、ホーンをサポートに接続するために必要なネジが付属しています。サポートには、サーボに取り付けるために必要なネジが付属しています。接続をサポートするためのサポートとプラスチック部品の接続をサポートするためのネジを別途購入する必要があります。 DIN912M2-6およびM2-10のネジとナットを使用しました。
- ロボットの足の裏にシリコンパッドを貼り付けることで、トラクションを向上させることができます。
- テスト中に脚が互いにぶつかると、サーボに付属のプラスチック製のサーボホーンが裂けるため、金属製のサーボホーンを使用することをお勧めします。ホーンが裂けると、ロボットにたるみが生じ、動きの再生の精度が低下します(それ以外の場合は驚くほど優れています)。
コード
モーションコントロールと再生用のArduinoプログラム
https://github.com/ptavaressilva/Walbi カスタムパーツとエンクロージャー
3Dプリント部品のSTL
元々はthingiverse.comのFlashForge CreatorProCADファイルに印刷されていました製造プロセス