


3Dプリントステッピングモーター
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
このプロジェクトについて
https://www.youtube.com/embed/v2FNUNALSTw 私は最近、この3DプリントDCモーターの説明に出くわし、ステップを実行できると考えました。 さらに遠く;文字通り。私はこのステッピングモーターを、8つの電磁石、6つのネオジム磁石、3Dプリントされたローターとステーターのハウジングで設計しました。これは特に、15度のフルステップと7.5度のハーフステップが可能な永久磁石ステッピングモーターです。ステッピングモーターにはさまざまな種類がありますが、それらのほとんどは、私がここで設計したものと非常によく似ています。これは、ステッピングモーターがどのように機能するかを他の人に示すための教育的な展示です。私はこれを5-12VDC電源で動作するように設計したので、ほとんどのUSB電源で動作します。
YouTubeチャンネルでもプレゼントをやっています。 arduino、このプロジェクトで使用したトランジスタ、およびいくつかのスイッチをプレゼントします。最後のステップで詳細をご覧ください。
ステップ1:必要なもの
<図>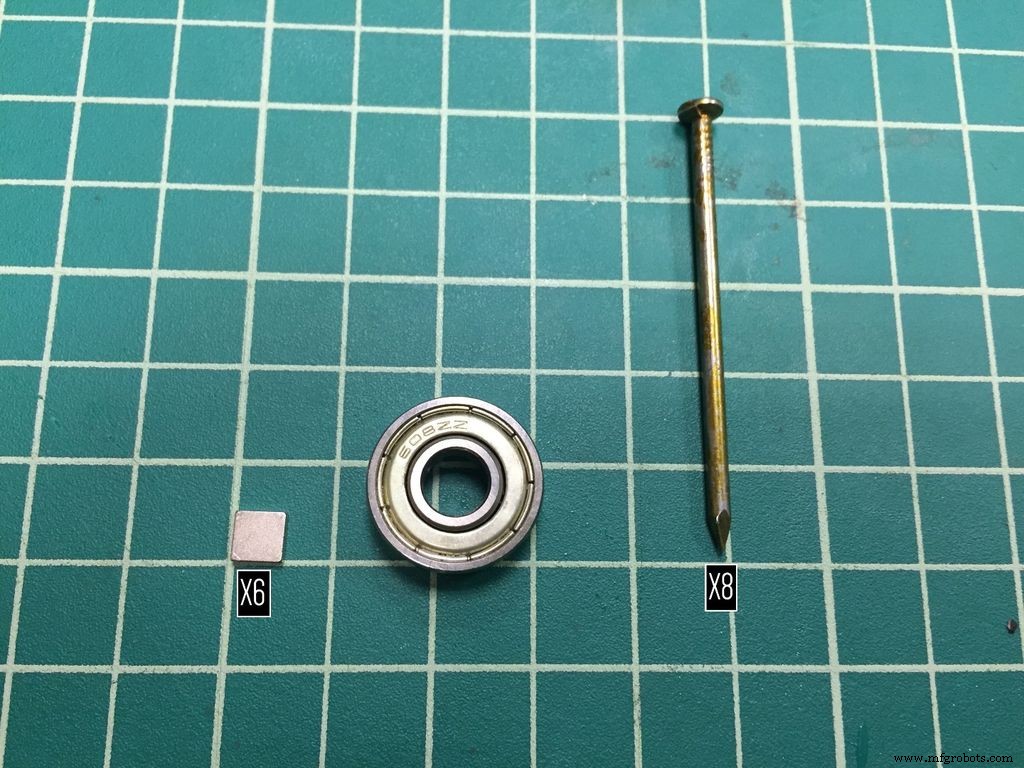 <図>
<図>  <図>
<図> 
- 6つの1/4 "ネオジム磁石
- 608ZZベアリング
- 8本の8d2-3 / 8 "釘-フィットする限り、どの釘を使用するかは重要ではありません。
- マグネットワイヤー-0.315mmのマグネットワイヤーを使用しましたが、これは重要ではありません。
- Arduino Uno
- 4つのトランジスタ-私は横になっていたPNPトランジスタを使用しましたが、モーターが引き込む電流を処理できることを確認する限り、任意のトランジスタまたはMOSFETを使用できます。具体的な推奨事項については、データシートを注意深くお読みください。 5vの鉱山モーターは約1アンペアを消費し、12vでは約3アンペアを必要とします。
- 3Dプリントされたローターとステーター
- 接着剤
- 電気テープ
- コンパス
ステップ2:ドデカゴンローターとオクタゴンステーターを印刷する
<図>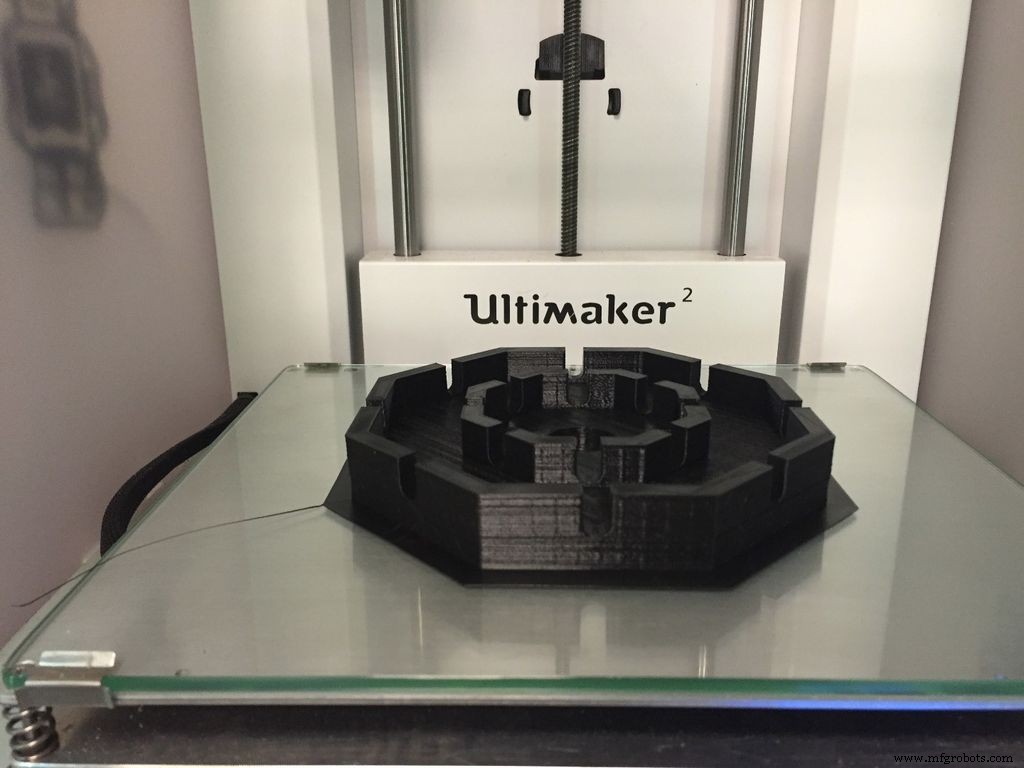
3Dハブで印刷してください!
ステップ3:
<図> <図>
<図>  <図>
<図> 
コンパスを使用して磁石の極を決定し、北の極を外側に向けて磁石を接着します。磁石が十分に強い場合、一部のスマートフォンのコンパスは磁石の極性を表示します。
ステップ4:
<図>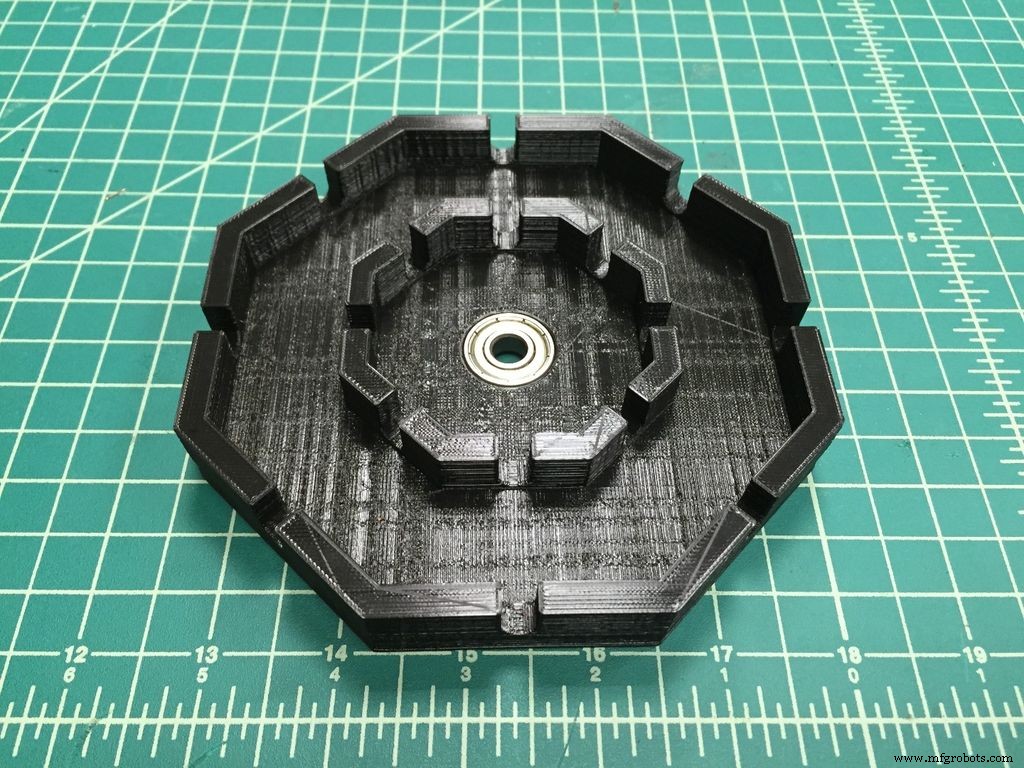 <図>
<図> 
ベアリングをステーターに圧入してから、ローターをベアリングに圧入します。ベアリングプレスがステーターにどれだけうまくフィットするか、私はうれしく驚きました。 3D印刷の場合、穴は内側に縮み、予想よりも小さくなりがちなので、通常は少し大きめになります。
ステップ5:
<図>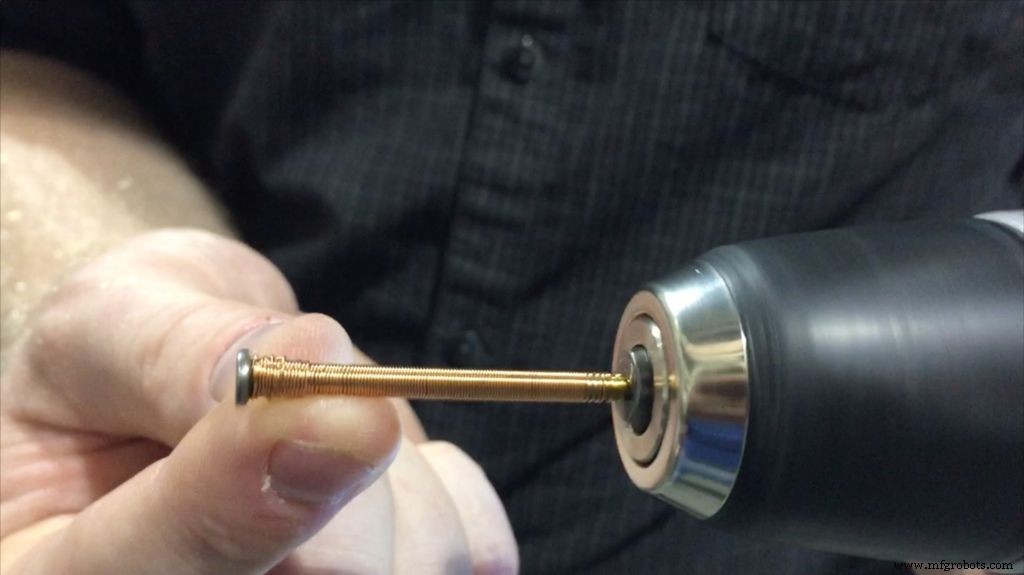 <図>
<図>  <図>
<図> 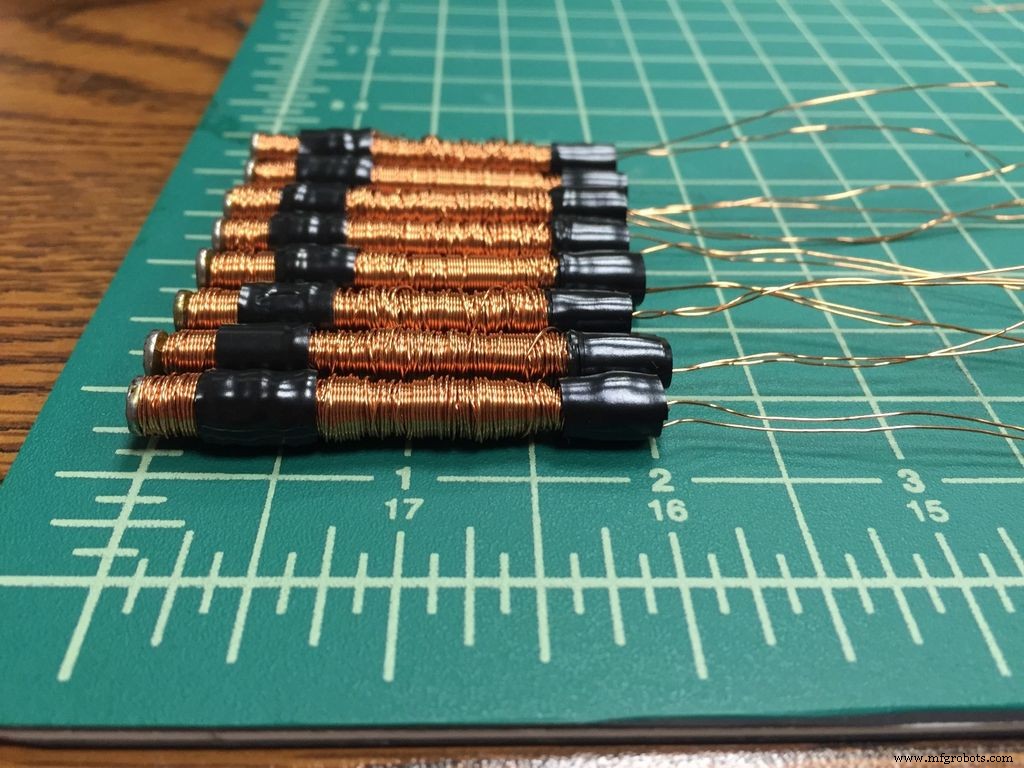
9本のワイヤーを25フィートにカットし、ドリルで巻きます。コンパスとバッテリーを使用して、釘の頭に南極を与えるために必要な構成を決定します。マーカーまたは熱収縮チューブを使用して、電磁石のマイナスリードに印を付けます。電磁石のセクションを電気テープで包み、固定子ハウジングと接触させます。これには2つの目的があります。電磁石をしっかりと固定し、コイルが発生する可能性のある熱からハウジングを絶縁します。コイルペアは、私が使用している5V電源で約1アンペアを消費します。私が選んだトランジスタは、コイルが約3アンペアを引き出す12V電源を使用して処理できます。高電圧電源の問題は、少しの間稼働させたままにすると、コイルが暖かくなり始めることです。
警告:
私はこれを5-12VDC電源で動作するように設計しました。殴られた道から外れることにした場合は、オームの法則を使用して、必要なコイルのサイズを決定します。 V =I * R
コイルの巻線が少ないほど、抵抗が低くなることを忘れないでください。注意しないと、コイルが電源やトランジスタで処理できるよりも多くの電流を引き込み、悪いことが起こります。
ステップ6:
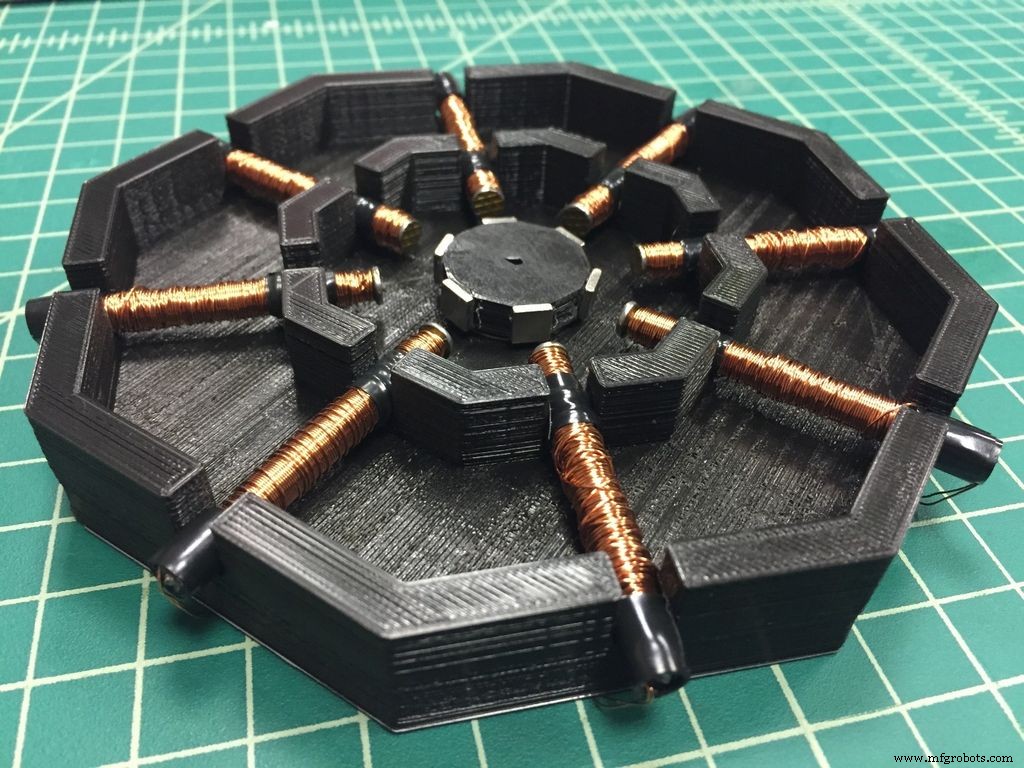
電磁石をネオジム磁石から約1/4 "になるまで固定子に押し込みます。電磁石は好きなように出し入れできますが、釘がはるかに速く磁化されるため、電磁石を近づけすぎないようにしました。これは、釘を使用することの欠点です。モーターは、磁化された後も機能しますが、効率は低下します。釘を敷設する場合は、釘の代わりに溶接棒を使用することをお勧めします。
ステップ7:すべてを一緒にはんだ付けする
<図>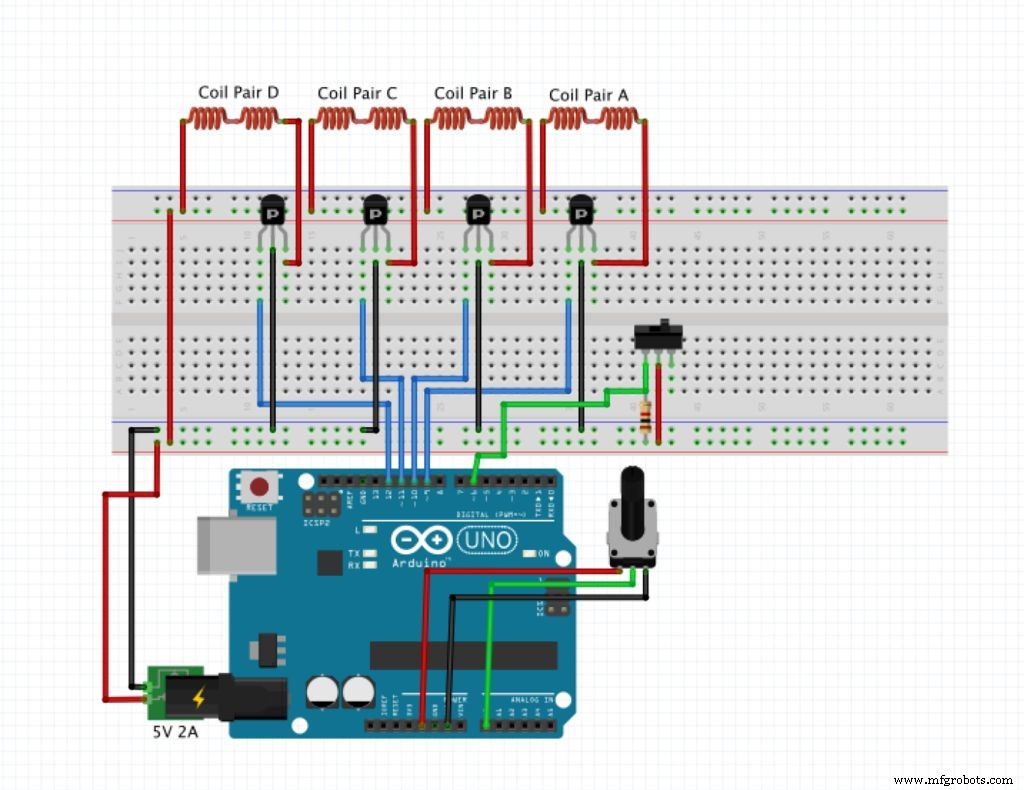 <図>
<図> 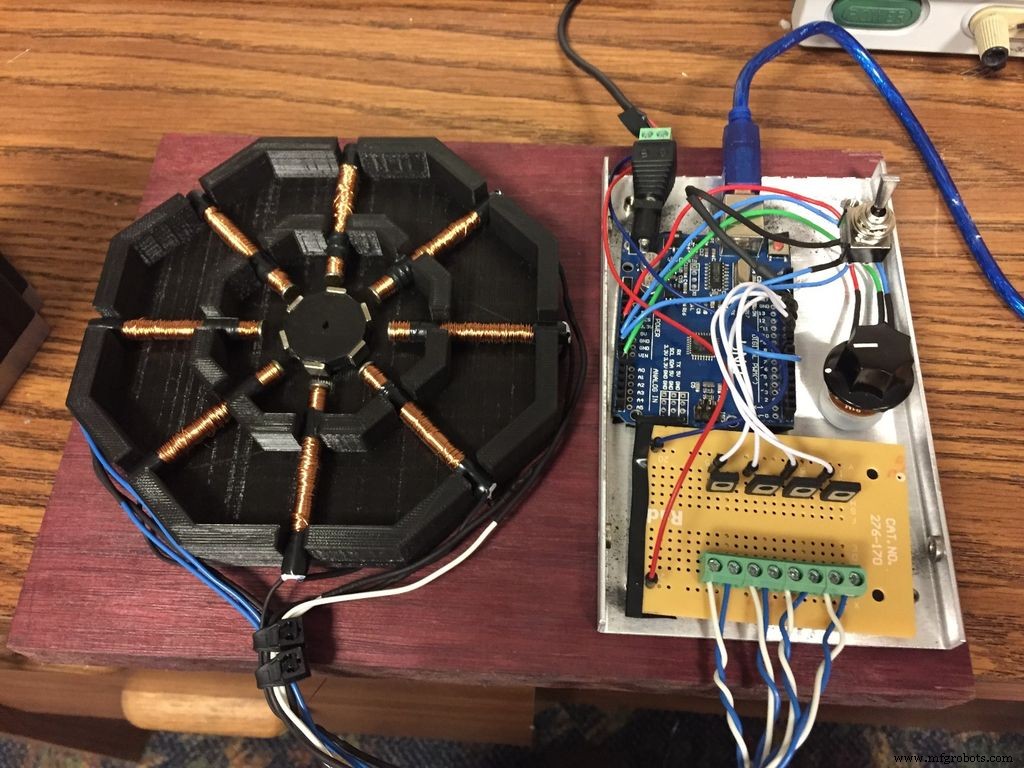
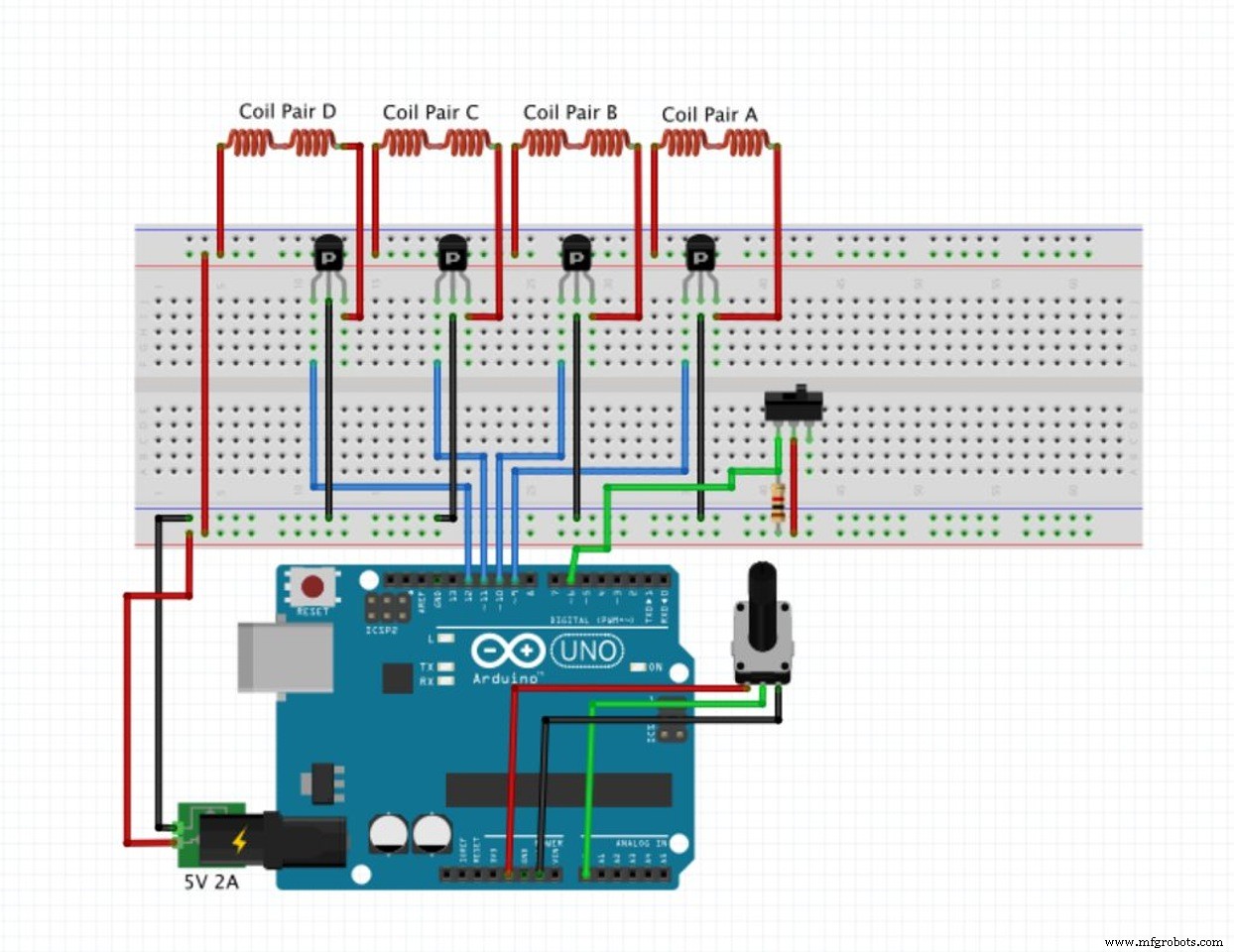
コイルペアを直列に配線し、電磁石のすべての南極が内側を向くように接続します。回路図で使用した抵抗は1k抵抗です。これの目的は、オフ位置にあるときにデジタルピンがハイに「フローティング」するのを防ぐことです。繰り返しになりますが、コイルが要求する電流に耐えることができるトランジスタを使用してください。
arduinoにソースコードをロードすると、準備が整います!
ステップ8:前払い!
<図>
このプロジェクトで使用するトランジスタであるarduinoと、いくつかのスイッチとジャンパー線をプレゼントします。
プレゼントのルール:
購読する YouTubeチャンネル、 この動画にコメントを残して、次に私が作成してほしいものを伝えてください。 9月1日、チャンネル登録者のコメントをランダムに選び、無料で発送します!こんなに歓迎的なコミュニティになってくれてありがとう!
コード
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.ino プレーンテキスト
/ * 010100000111001001101111011101000110111100100000010001113D Printed Stepper Motor作成日:2015年8月15日変更日:2015年8月15日作成者:Anthony Garofalo(Proto G)YouTubeチャンネルにアクセス:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7HpTpZwVisit my Instructable /www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ | _____] | _____ / | | | | | | ____ | | \ _ | _____ | | | _____ | | _____ | 01010000011100100110111101110100011011110010000001000111 * / int Delay; int reverseSwitch; void setup(){//デジタルピン13を出力として初期化します。 pinMode(9、OUTPUT); pinMode(10、OUTPUT); pinMode(11、OUTPUT); pinMode(12、OUTPUT); pinMode(13、OUTPUT); //ビジュアルpinMode(6、INPUT);のLEDピン//トグルスイッチは方向を反転させるためにデジタルピン6に接続されています} void loop(){reverseSwitch =digitalRead(6); if(reverseSwitch ==HIGH){//リバーススイッチがハイの場合、ローターを反時計回りに回転させますDelay =analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(12、HIGH); digitalWrite(13、HIGH); delay(遅延); digitalWrite(12、LOW); digitalWrite(13、LOW); delay(5);遅延=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(11、HIGH); delay(遅延); digitalWrite(11、LOW); delay(5);遅延=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(10、HIGH); digitalWrite(13、HIGH); delay(遅延); digitalWrite(10、LOW); digitalWrite(13、LOW); delay(5);遅延=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(9、HIGH); delay(遅延); digitalWrite(9、LOW); delay(5); } else {//リバーススイッチが高くない場合は、ローターを時計回りに回転させます。Delay=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(9、HIGH); digitalWrite(13、HIGH); delay(遅延); digitalWrite(9、LOW); digitalWrite(13、LOW); delay(5);遅延=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(10、HIGH); delay(遅延); digitalWrite(10、LOW); delay(5);遅延=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(11、HIGH); digitalWrite(13、HIGH); delay(遅延); digitalWrite(11、LOW); digitalWrite(13、LOW); delay(5);遅延=analogRead(0);遅延=map(遅延、0、1023、60、2000); digitalWrite(12、HIGH); delay(遅延); digitalWrite(12、LOW); delay(5); }} カスタムパーツとエンクロージャー
回路図
製造プロセス