


Bluetooth制御のピックアンドプレースロボット
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
イントロ
このチュートリアルでは、Androidスマートフォンで制御されるピックアンドプレースロボットを構築する方法を示します。 MIT AppInventorプラットフォームを使用してモバイルアプリを構築しました。このチュートリアルでは、このプロジェクトの各部分について個別に説明します。話し合います:
- 1サーボモーターの制御方法
- 2DCモーターを制御する方法
- 3Bluetoothモジュールの使用方法
- 4携帯電話でロボットを制御する方法
したがって、このチュートリアルでボットを構築するためのすべてのニーズが満たされることを願っています。
シナリオ
まず、ロボットがどのように注文を受け取るかを知る必要があります。モバイルアプリに接続するBluetoothモジュールを使用しています。これは後で作成します。今のところ、Bluetooth接続を使用してモバイルでロボットにコマンドを送信することを知っておく必要があります。
<図>
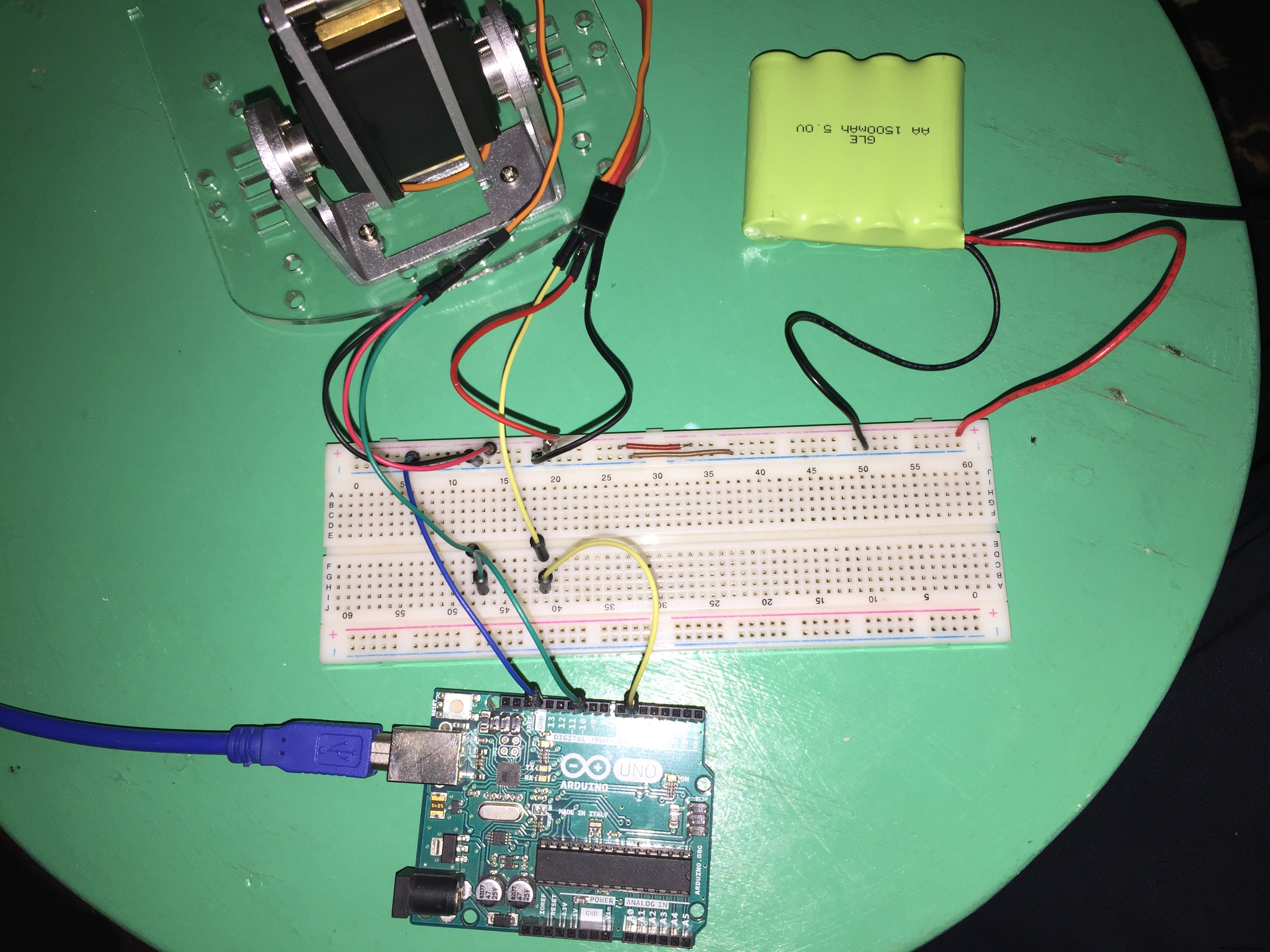
ハードウェア
- キットには簡単な組み立てが必要ですが、時間がかかります。キットに含まれている組み立て手順に従ってください。
アセンブリの最後には、次のようになります。
<図>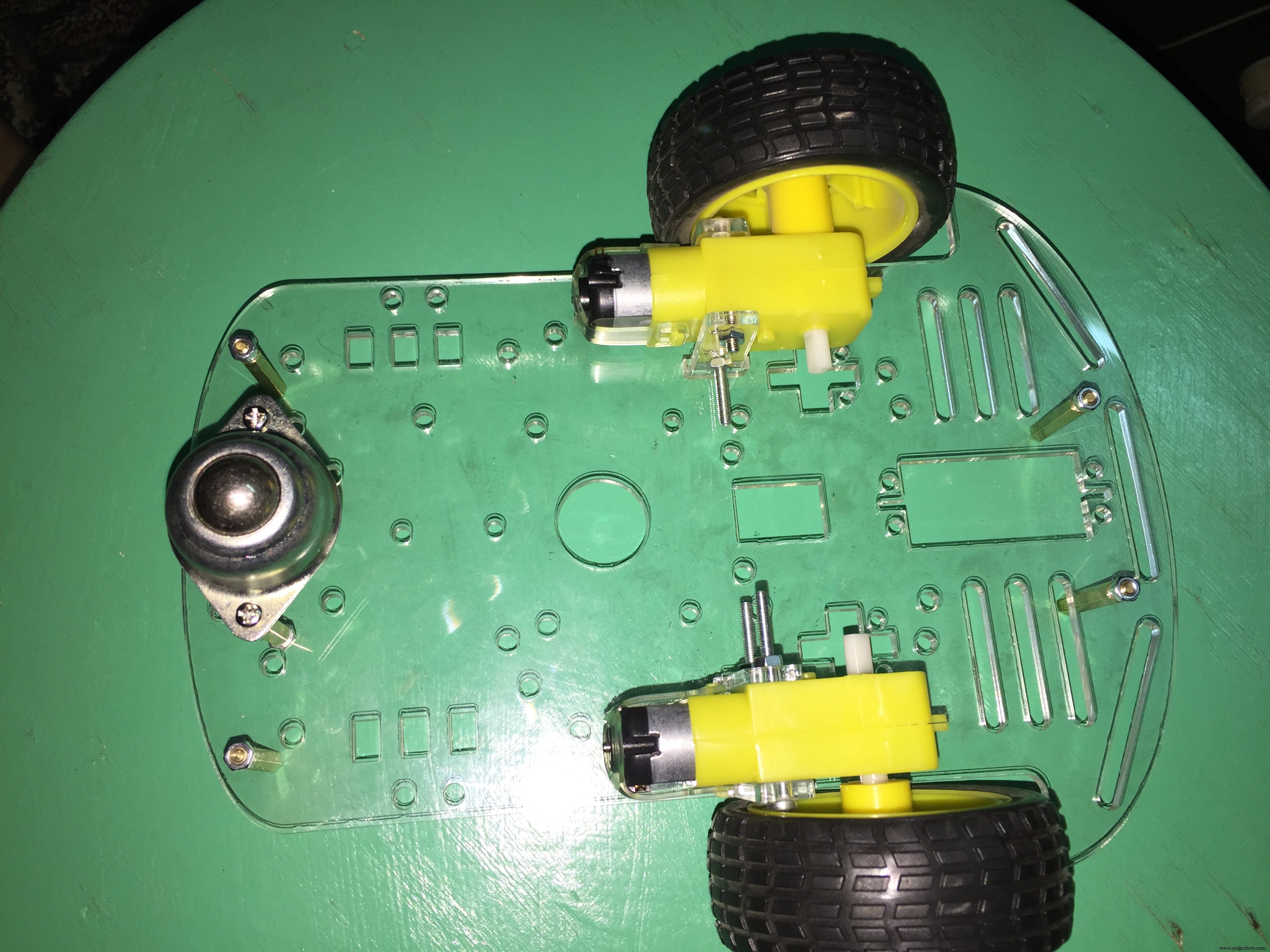
<図>
モーターシールドを使用すると、モーターと通信できます。モーターをArduinoボードに直接接続すると、発火します! すべてのモーターには少なくとも80MAが必要ですが、デジタルArduinoピンが提供できる最大電流は40MAであるため、しないでください モーターをArduinoボードに直接接続してみてください。
- モーターシールド モーターの方向を制御するのに役立ちます(たとえば、前進、後退、解放)。
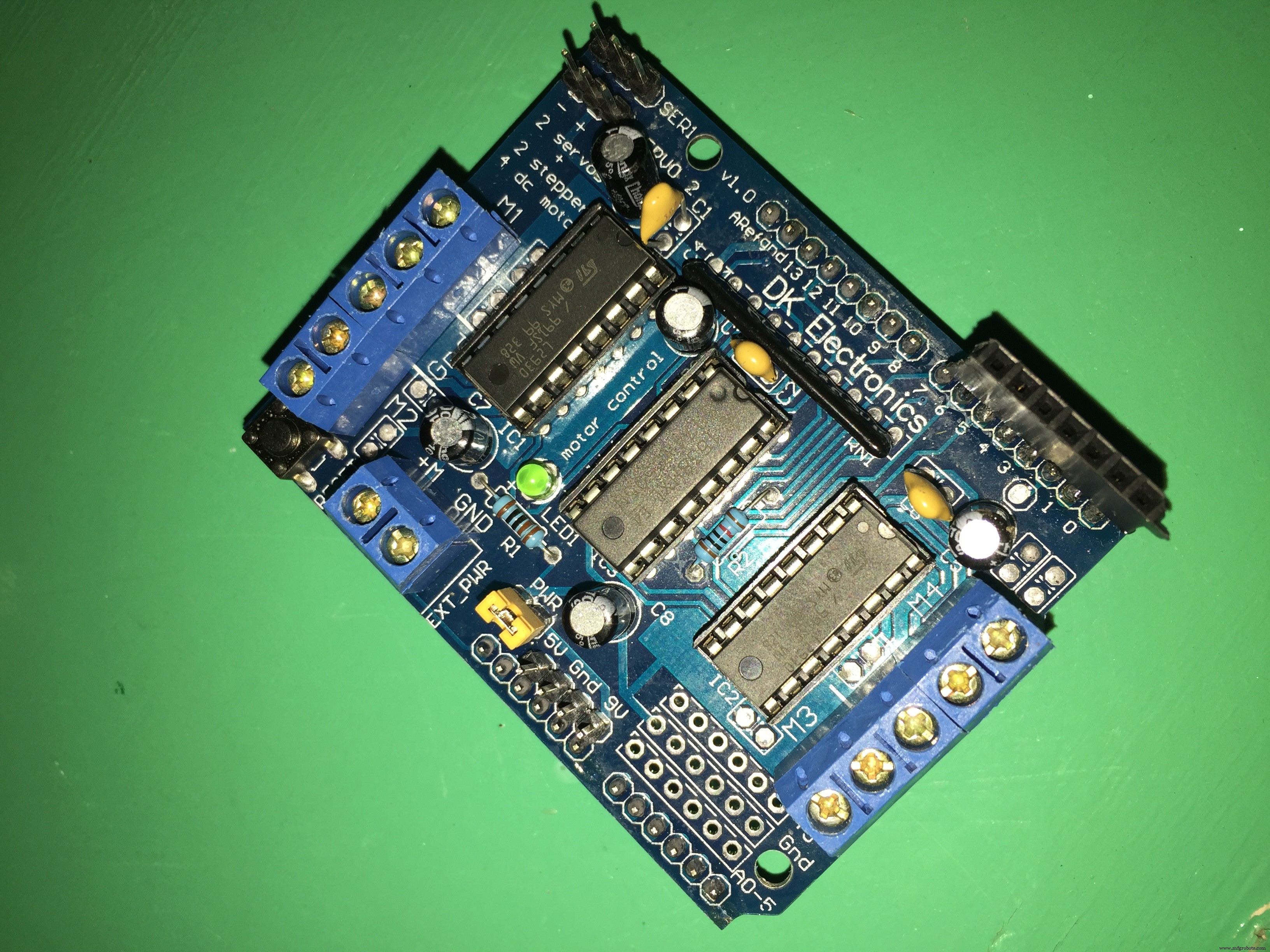
- モーターシールド 最大4つの双方向DC を制御できます 個別に8ビットの速度を選択できるモーター(つまり、約0.5%の分解能)。
シールドの上部にいくつかのピンヘッダーをはんだ付けして、Arduinoピンを使用できるようにすることができます。
<図>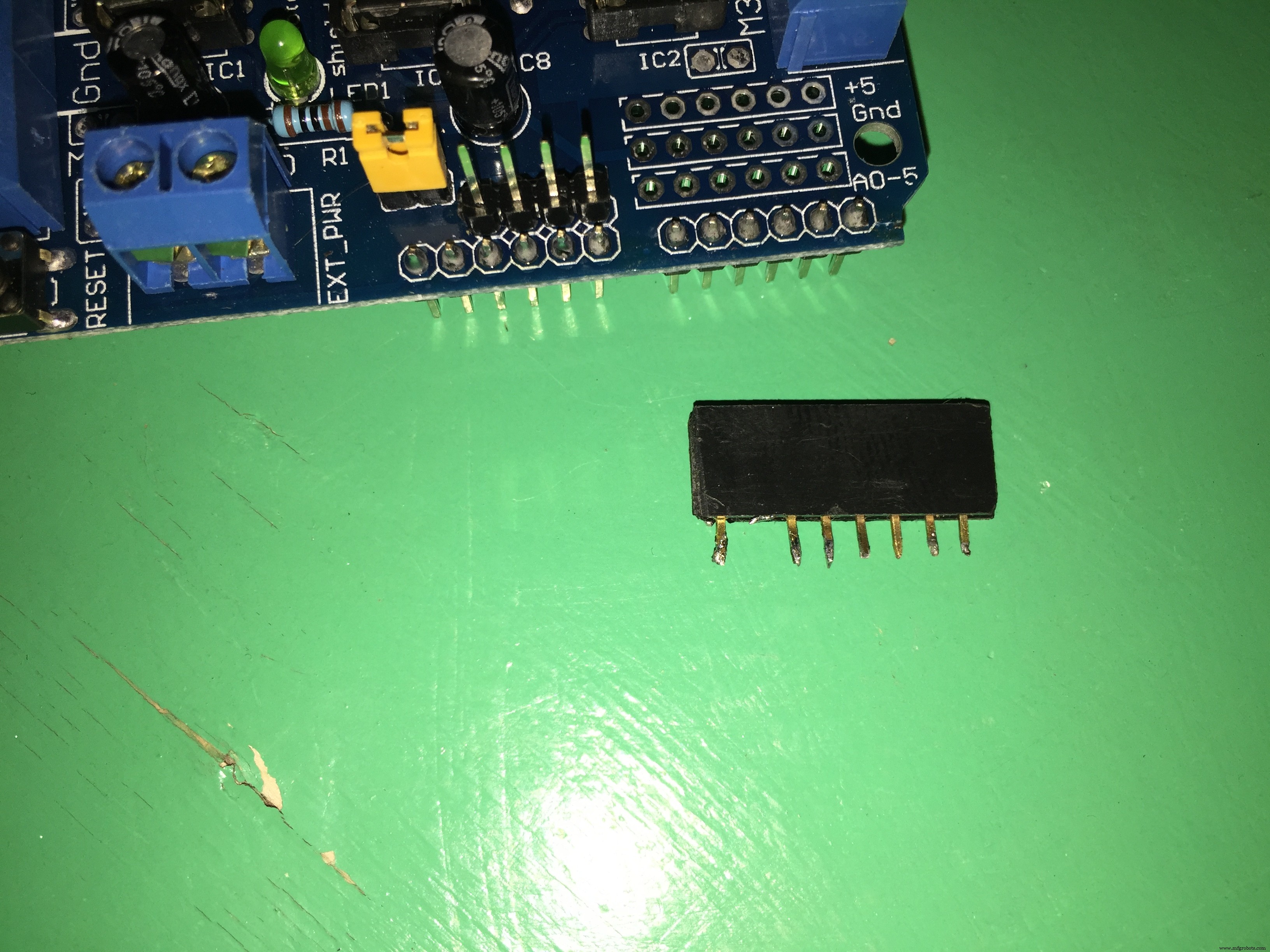
<図>

次のように、モーターシールドをArduinoボードの上に貼り付ける必要があります:
<図>
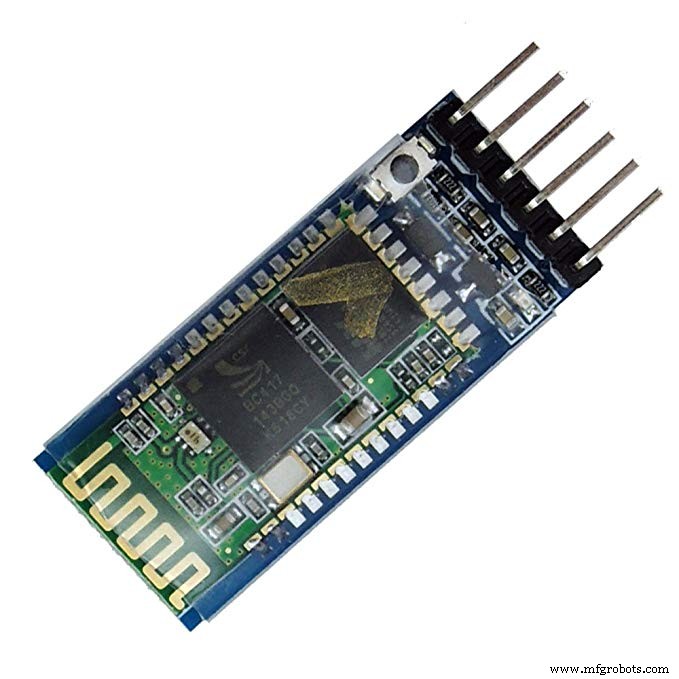
Bluetoothモジュール :注文を送信してアクションを実行するのは、パイロットとロボットの間のチャネルです。
<図>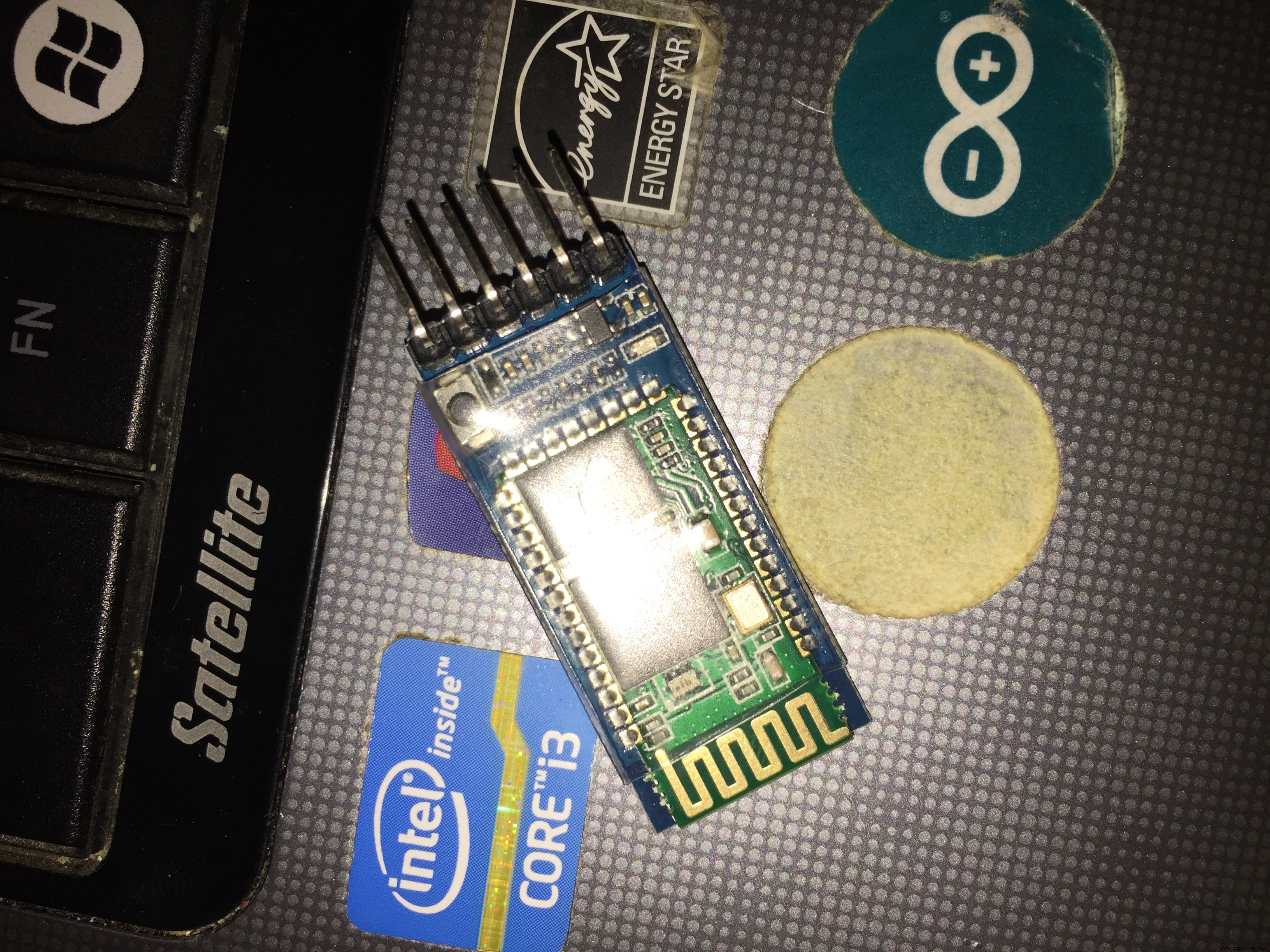
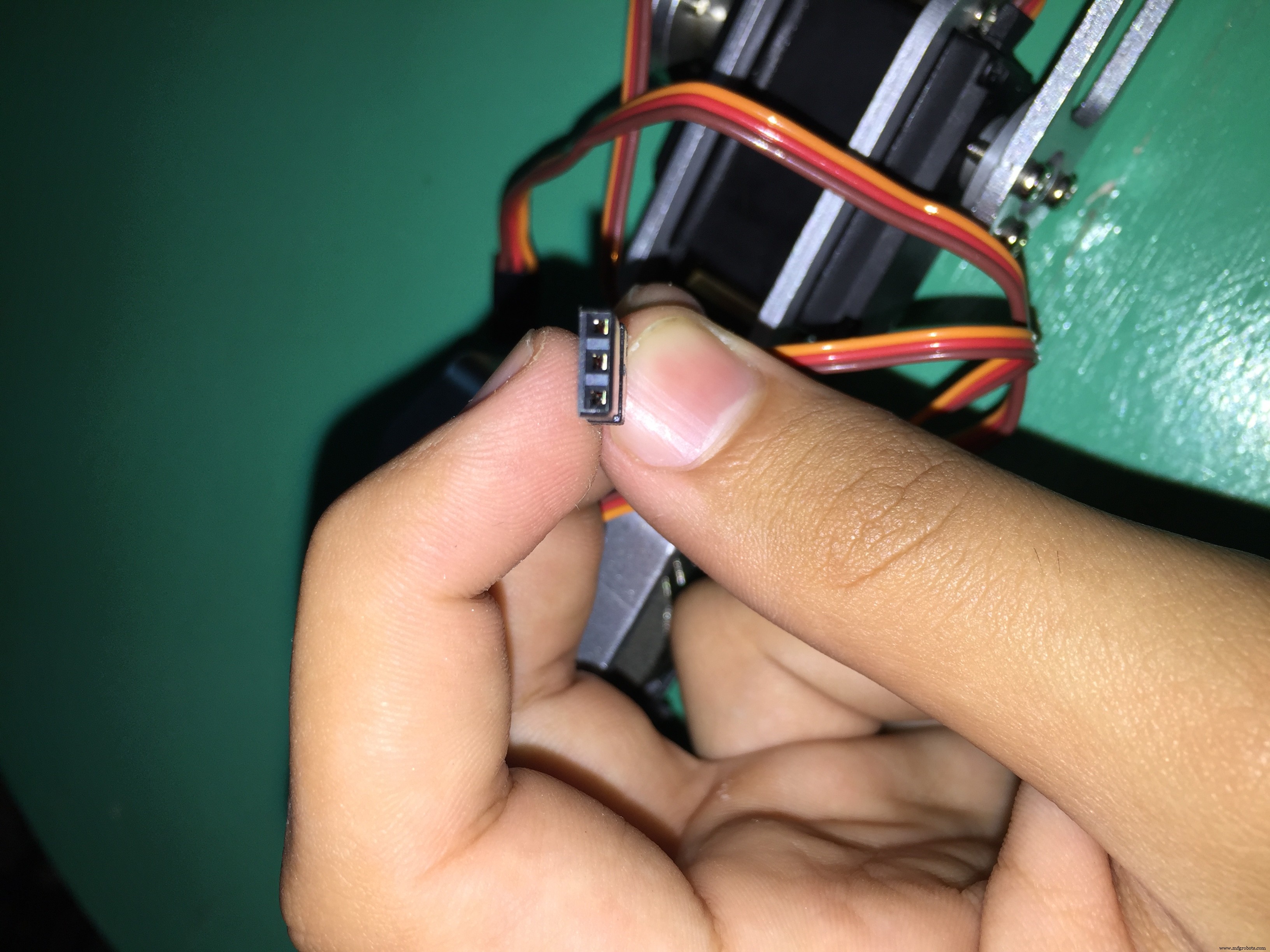
6本のピンがあります。真ん中の4つのピン(RX-TX-GND- + 5)のみを使用します:
<図>
接続します:
- Bluetoothモジュールの+5からArduinoの5vへ
- BluetoothモジュールのGNDからArduinoのGNDへ
- BluetoothモジュールのRxからArduinoのTxへ
- BluetoothモジュールのTxからArduinoのRxへ

注:RxからTxおよびTxからRxの理由
Bluetoothモジュールがデータ(Tx)を送信し、Arduinoがこのデータ(Rx)を受信するためです。
1つは送信し、もう1つは受信します
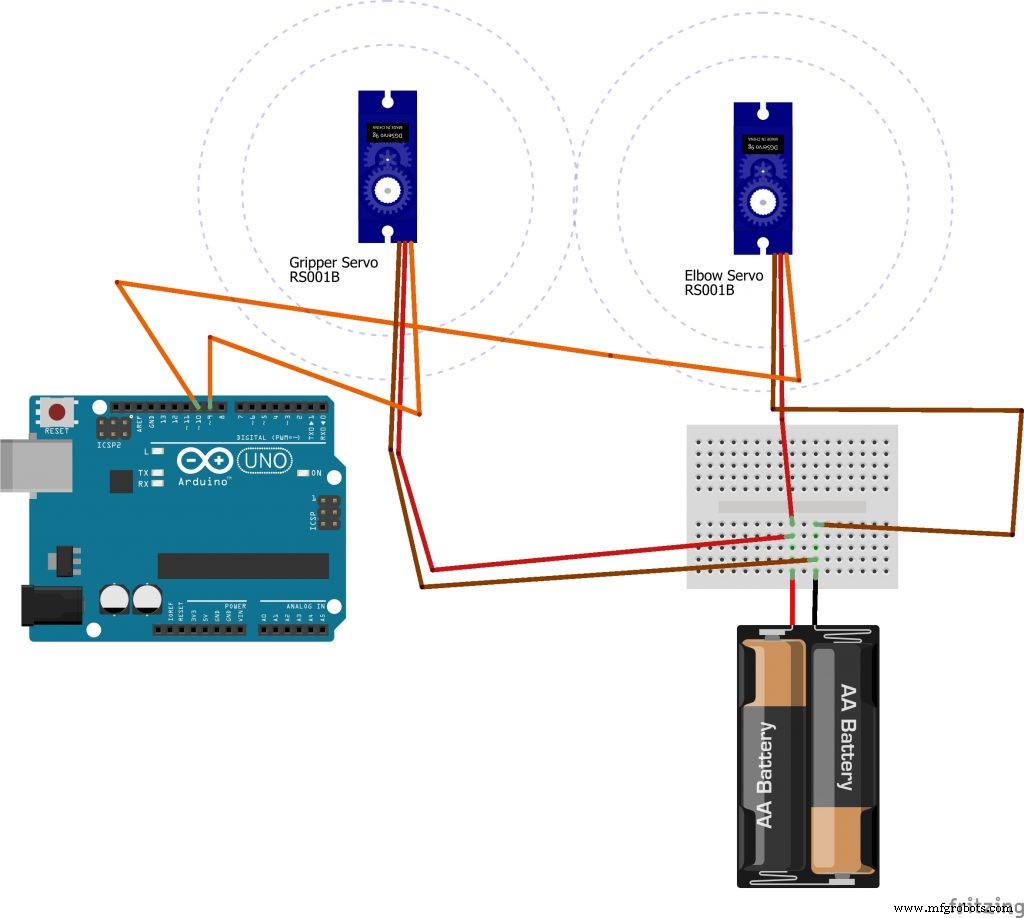
4)サーボモーターには、赤(正)、茶色(負)、黄色、またはオレンジ(信号)の3本のワイヤーがあります。
注:行う サーボモーターのプラスとマイナスをArduinoボードの5VとGNDに接続しないでください。 Arduinoボードは 火をつける モーターによって吸収される大電流のため。使用 外部バッテリー。
<図>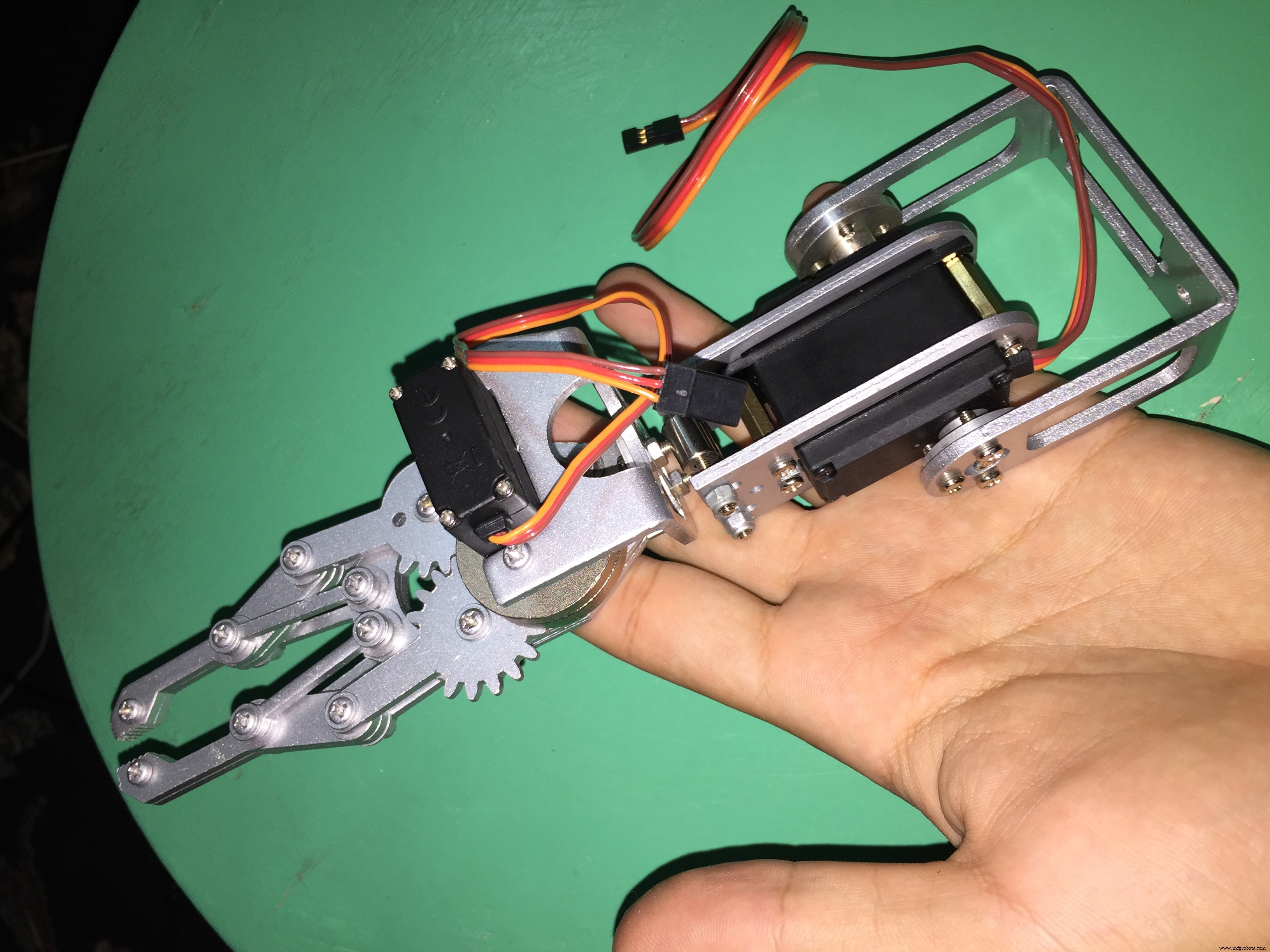
<図>
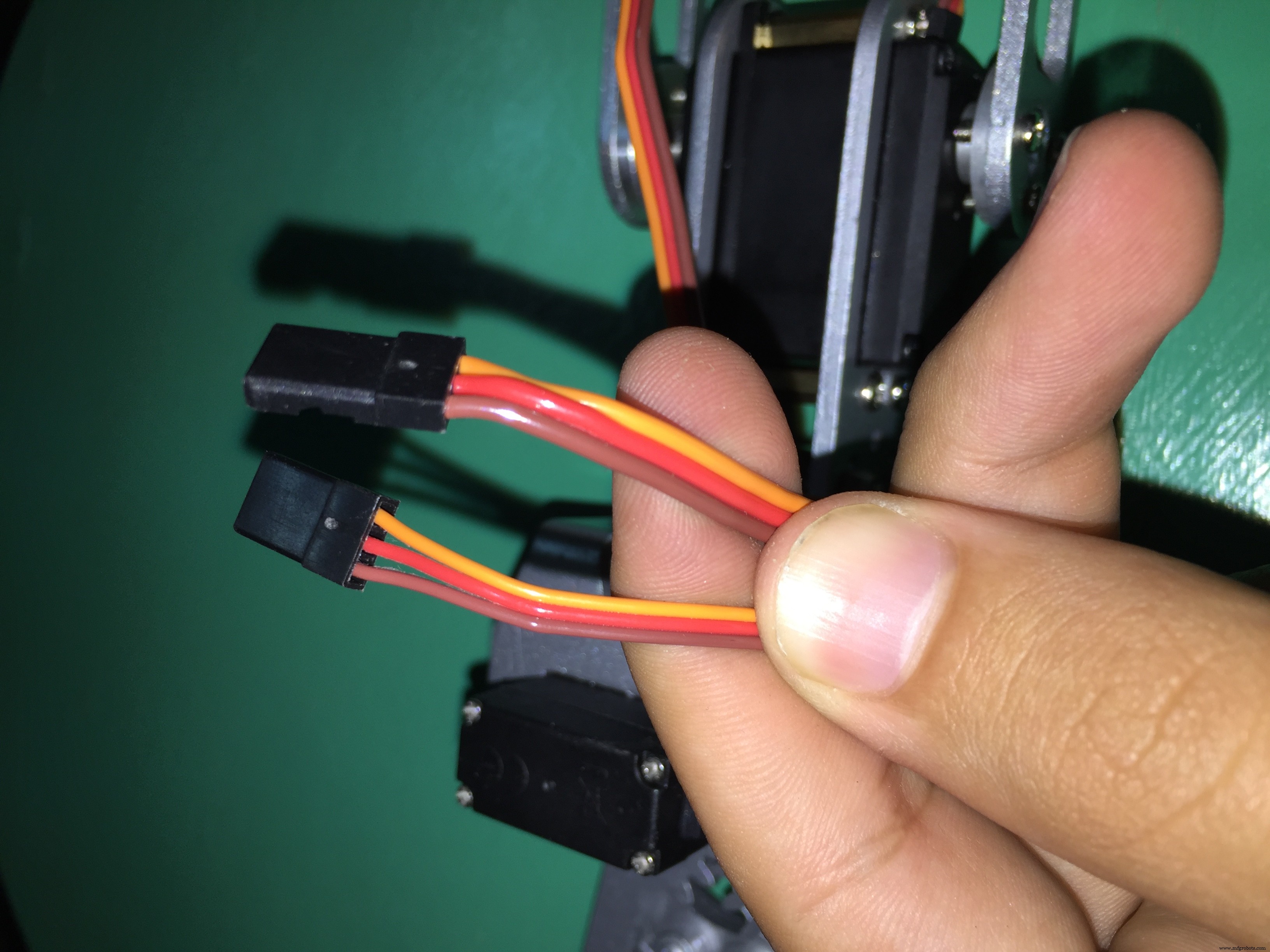
<図>
- 外部バッテリーのプラスへの赤いワイヤー
- 外部バッテリーのマイナスへの茶色のワイヤー
- Arduinoのデジタル(PWN)ピンへのオレンジ色のワイヤー
<図>
注:バッテリーのGNDとArduinoのGNDを共通にすることを忘れないでください。それぞれのGNDを相互に接続してください。
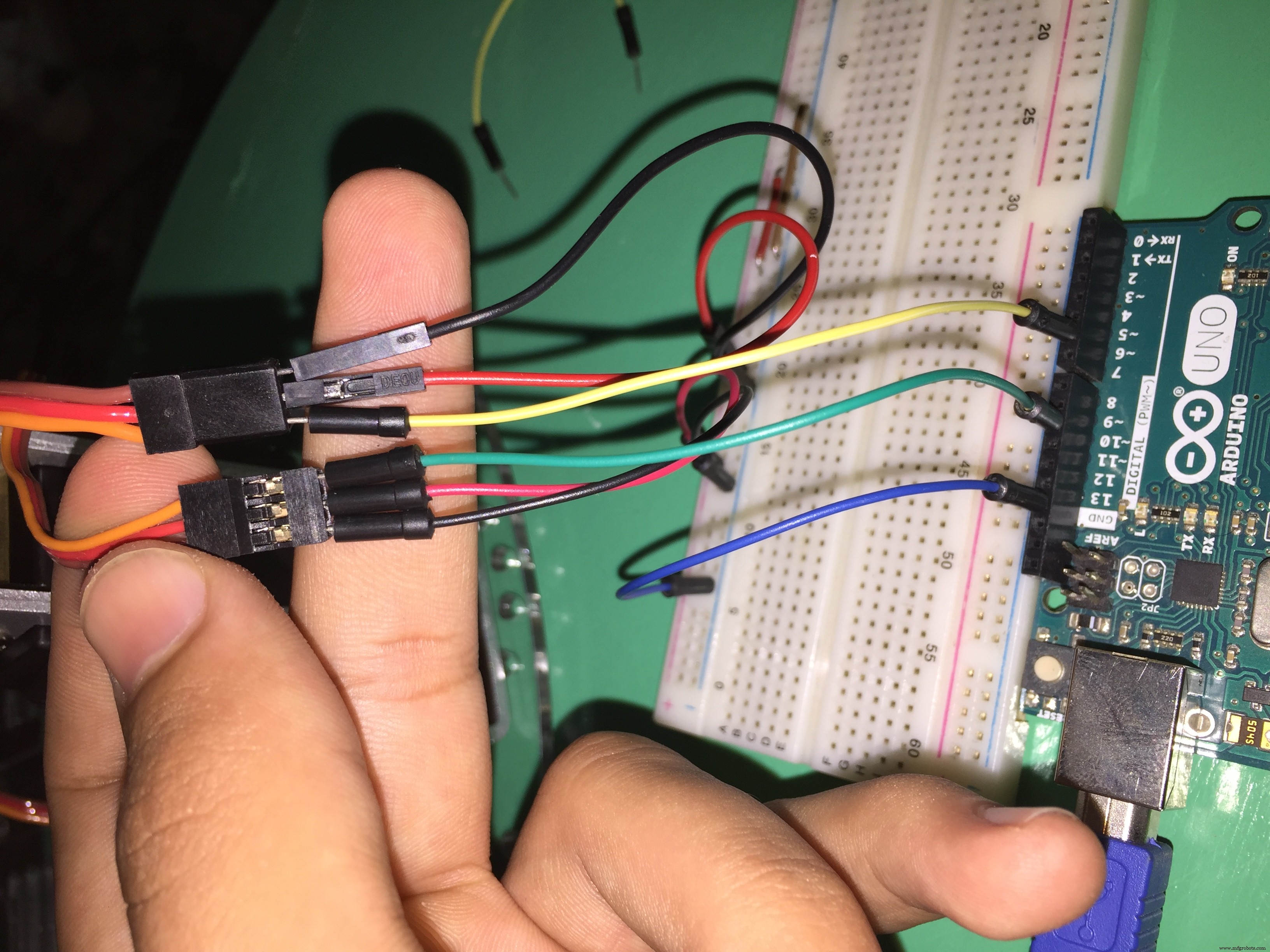
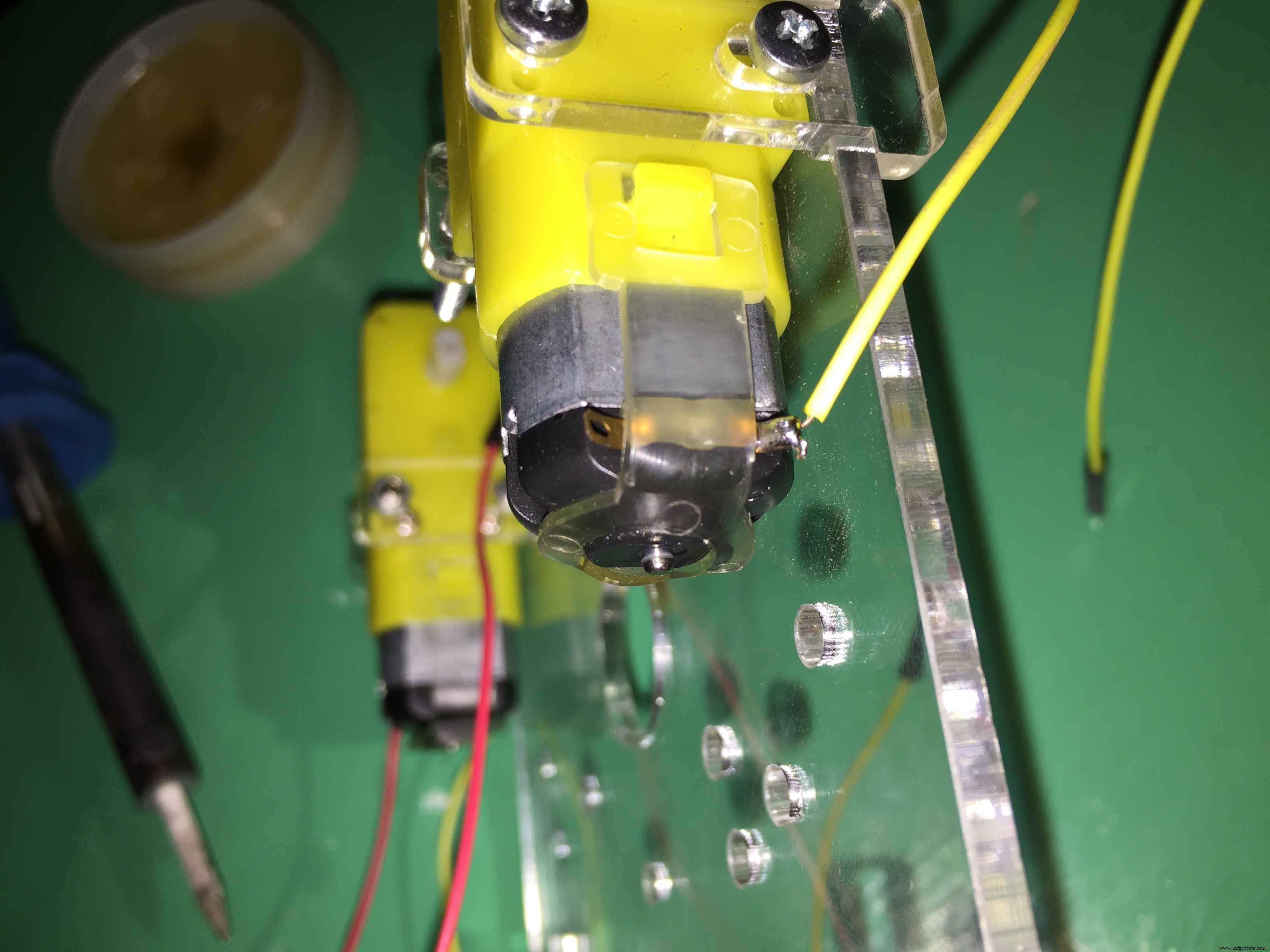
5)DCモーター
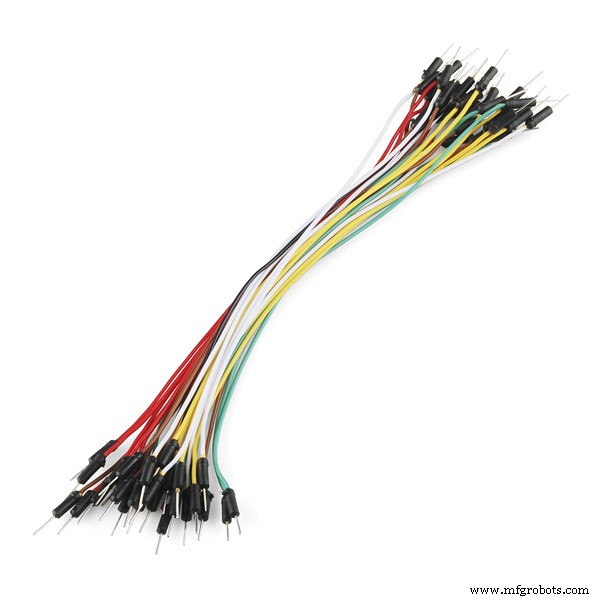
これらのモーターを使用できるようにするには、モーター端子にいくつかのワイヤーをはんだ付けする必要があります。
DCモーターには極性がありません。ポジティブもネガティブもありません。モーターの接続を逆にすると、モーターの移動方向が変わります。
<図>
<図>
モーター端子をはんだ付けしたら、これらの端子をモーターシールドに接続します。
<図>
注:で Arduinoコード、私 モーター1とモーター2を使用 -モーター3とモーター4ではありません。
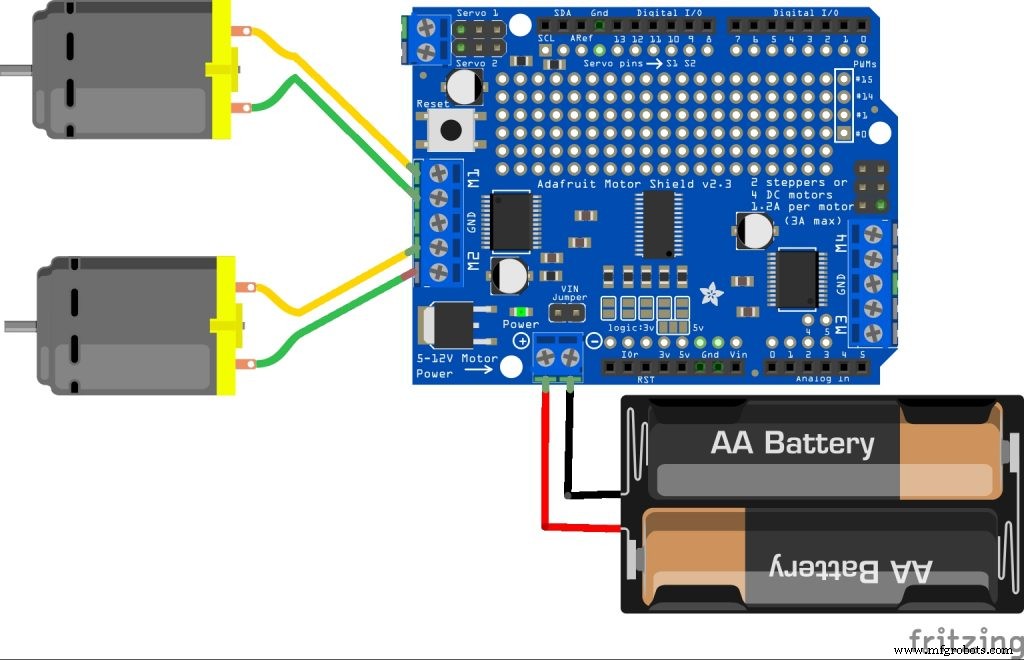
回路図
ロボットモーターとバッテリーをモータードライバーに接続する方法。
アームサーボモーターとバッテリーをArduinoボードに接続する方法。
<図>
BluetoothモジュールをArduinoボードに接続する方法。
<図>
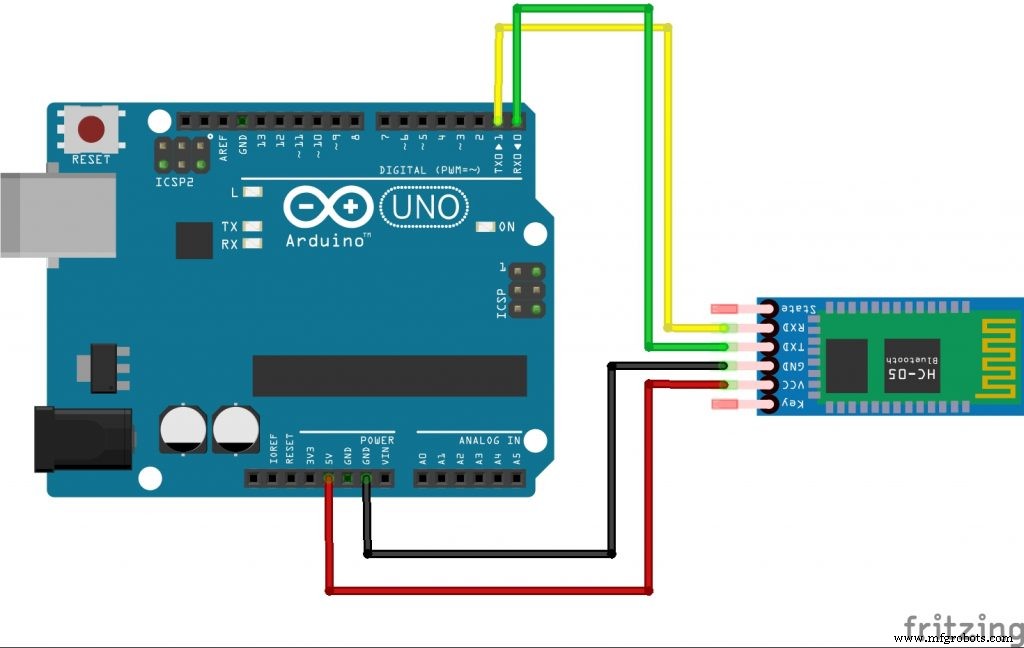
注:コードをArduinoボードにアップロードするときに、Bluetoothモジュールを切断(RED WIRE +5ピンを削除)します。アップロードプロセスが完了したら、再接続します。
コード
- ロボットArduinoコードを選択して配置
ロボットArduinoコードを選択して配置 Arduino
#include#include AF_DCMotor motorR(1); AF_DCMotor motorL(2); Servo elbowServo; Servo GripperServo; int command; void setup(){gripperServo.attach(9); elbowServo.attach(10); Serial.begin(9600); motorR.setSpeed(255); motorL.setSpeed(255);} void loop(){command =Serial.read(); / * ARMコード* / if(command> =1 &&command <=180)//肘サーボはmobアプリの親指の位置に応じて0〜180の間で移動します。{elbowServo.write(command);} else if( command ==205)//グリッパーを角度0に移動{gripperServo.write(0);} else if(command ==206)//グリッパーを角度90に移動{gripperServo.write(90); } else if(command ==207)//グリッパーが角度180に移動{gripperServo.write(180);} / *車のコード* / else if(command ==200){motorR.run(FORWARD); motorL.run(FORWARD);} else if(command ==201){motorR.run(FORWARD); motorL.run(BACKWARD); } else if(command ==202){motorR.run(RELEASE); motorL.run(RELEASE); } else if(command ==203){motorR.run(BACKWARD); motorL.run(FORWARD); } else if(command ==204){motorR.run(BACKWARD); motorL.run(BACKWARD); } else if(command ==0){motorR.run(RELEASE); motorL.run(RELEASE); }}
回路図
このアプリはAndroid携帯でのみ動作します。 Uこのアプリを使用する前にBluetoothをオンにする必要があります
アプリからBluetoothモジュールを選択する前に、携帯電話の設定から携帯電話とBluetoothモジュールをペアリングします
製造プロセス
- Bluetoothで制御されるRaspberryPi Robot
- ArduinoとRaspberryPiを使用してインターネット制御のビデオストリーミングロボットを構築する
- RaspberryPiを使用したWifi制御ロボット
- ピックアンドプレースロボット用のカスタム燃料インジェクターグリッパーの3Dプリント
- インドのロボットメーカーを選んで配置する
- ロボットサプライヤーのトップ10ピックアンドプレース
- ピックアンドプレース自動化用のロボットアーム部品
- ピック アンド プレース ロボットの仕組み
- ピック アンド プレース – EasyWork でのロボット使用の完璧な例
- ロボットとバッテリー製造:積極的なつながり
- エンド オブ アーム ツーリング:ロボット ピック アンド プレイス アプリケーション