


Bluetooth制御車
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
こんにちは!
制御できるものは何でも素晴らしいです。そうですね。私たち人間は物事を制御するのが大好きで、それが自動化とロボット工学がとても魅力的な理由です。
このチュートリアルでは、独自のBluetooth制御車を作成する方法を説明します。それでは始めましょう。
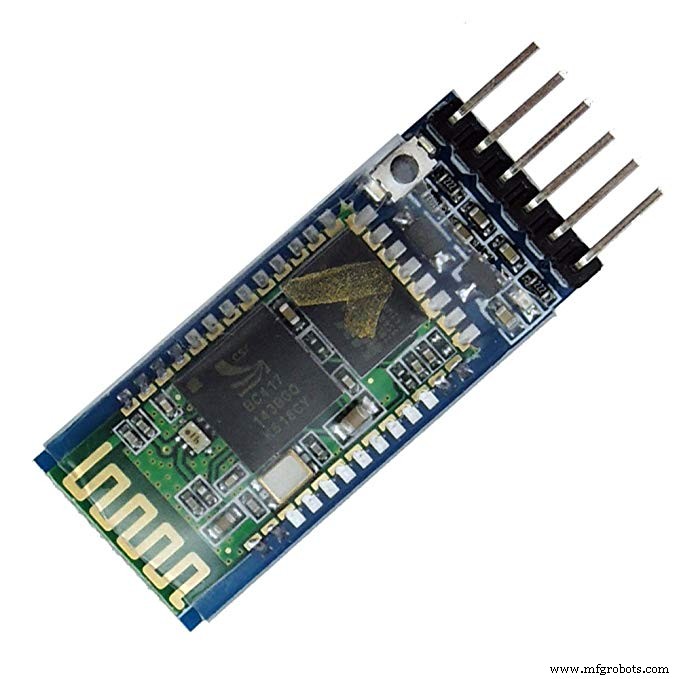
これはBluetooth制御の車になるため、このプロジェクトでは、HC-05Bluetoothモジュールを使用して制御データパケットを受信します。
また、Bluetoothモジュールに制御データパケットを送信するAndroidアプリも必要です。この目的のために、サードパーティのアプリケーション(ダウンロードするにはここをクリック)を使用します。
- ->わかりました。ハードウェアを構築しましょう。
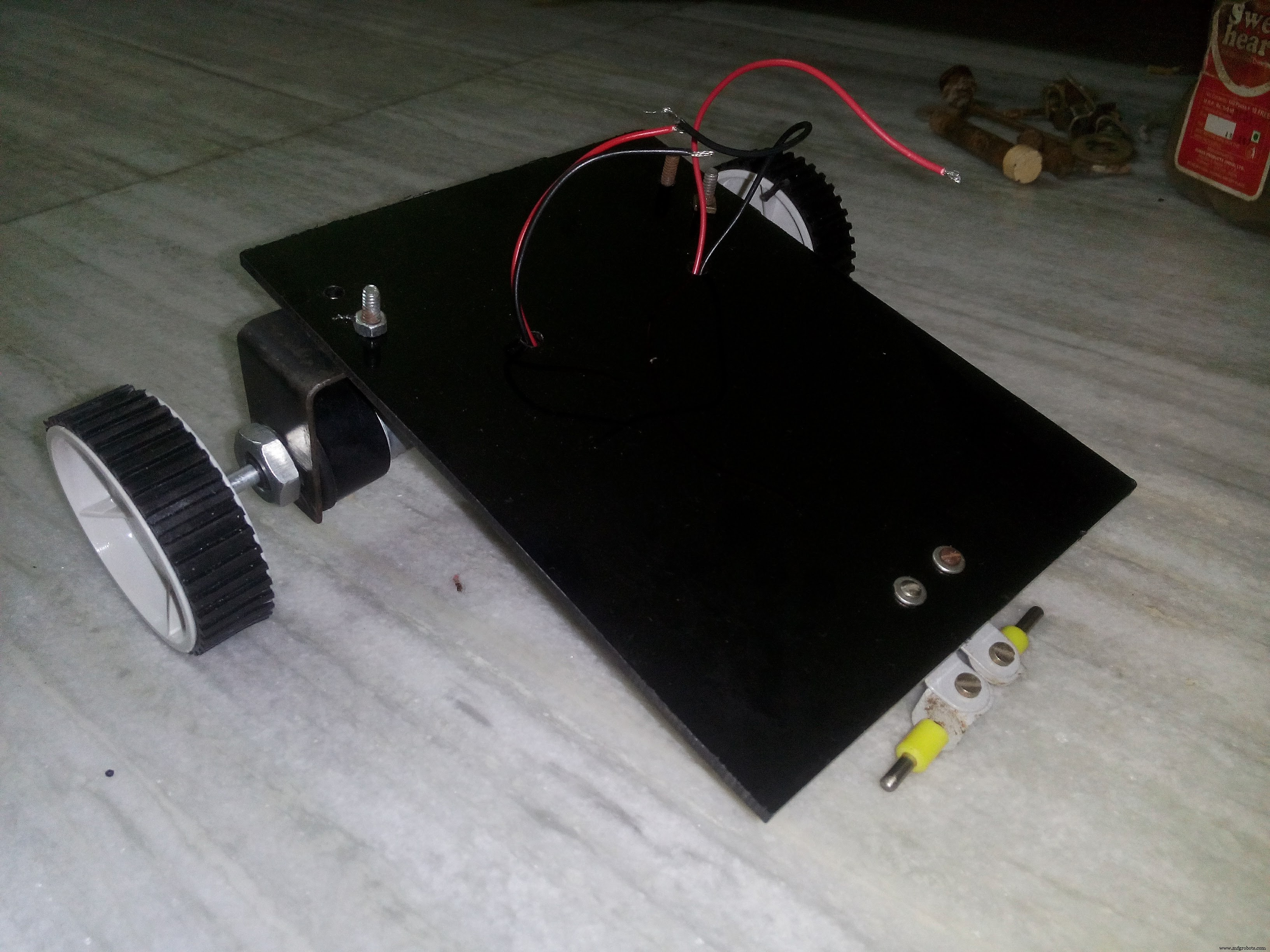
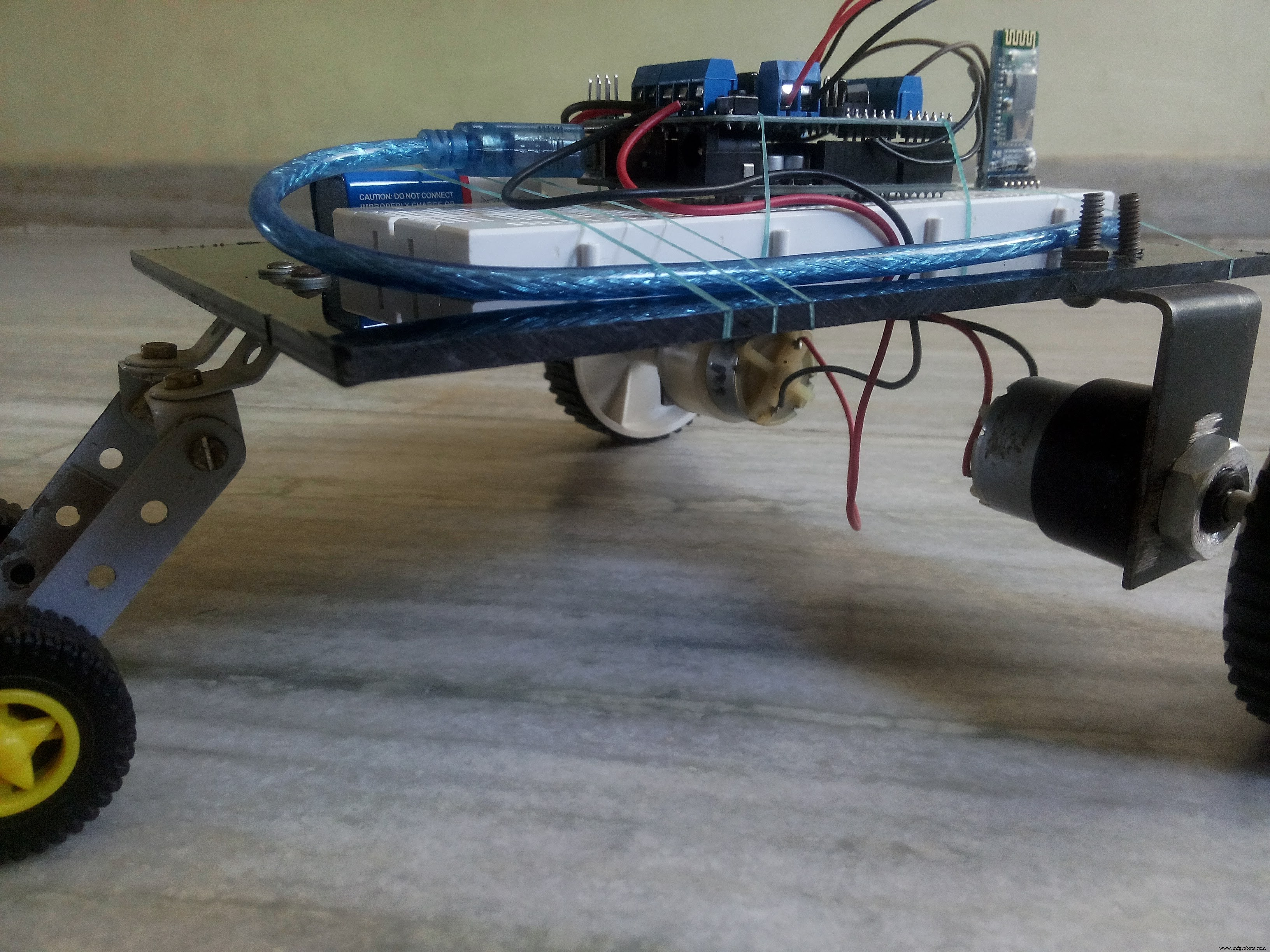
- ->車のボディ。
このプロジェクトのために私たちが構築している車は、デュアルモーターカーになります。私は2つの12v 200 rpmDCモーターを使用しました。既製のシャーシを使用できます。シャーシとしてPVCシートを使用しました。
<図>
 <図>
<図> 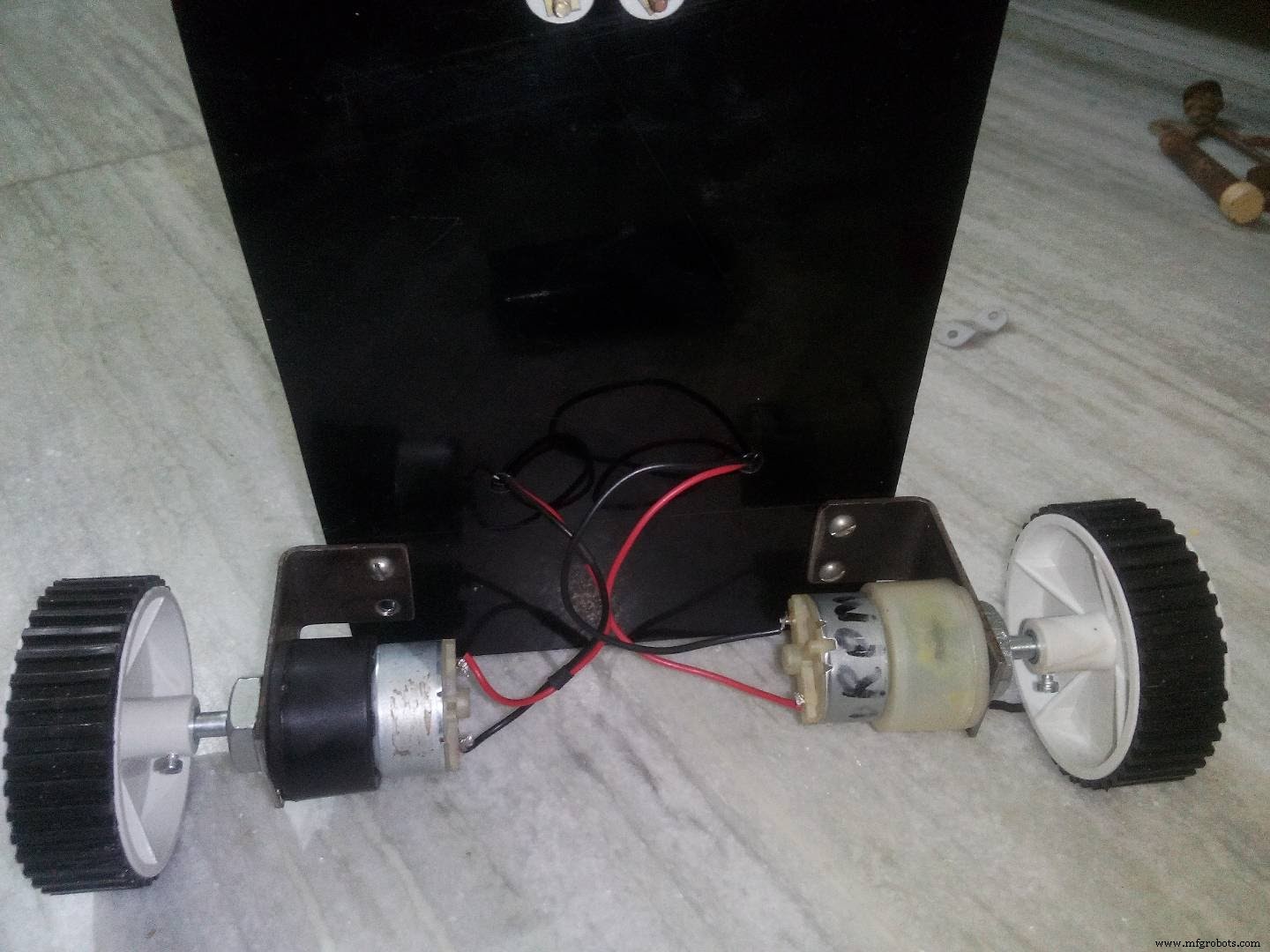
これで、私たちの車の基本構造が完成しました。この設計を使用することも、独自の設計を開発することもできますが、これは2モーター設計であるため、重量をできるだけ低くすることを忘れないでください。
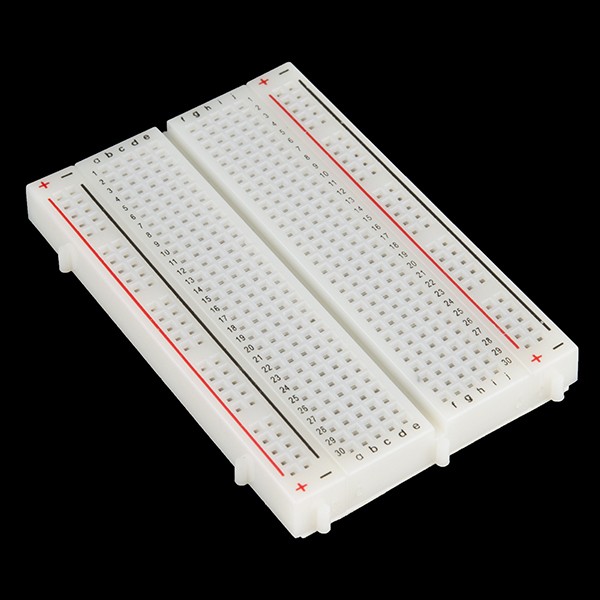
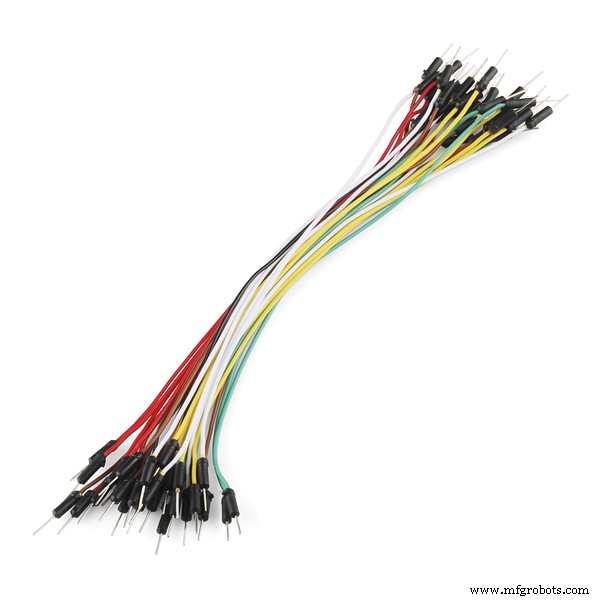
->回路
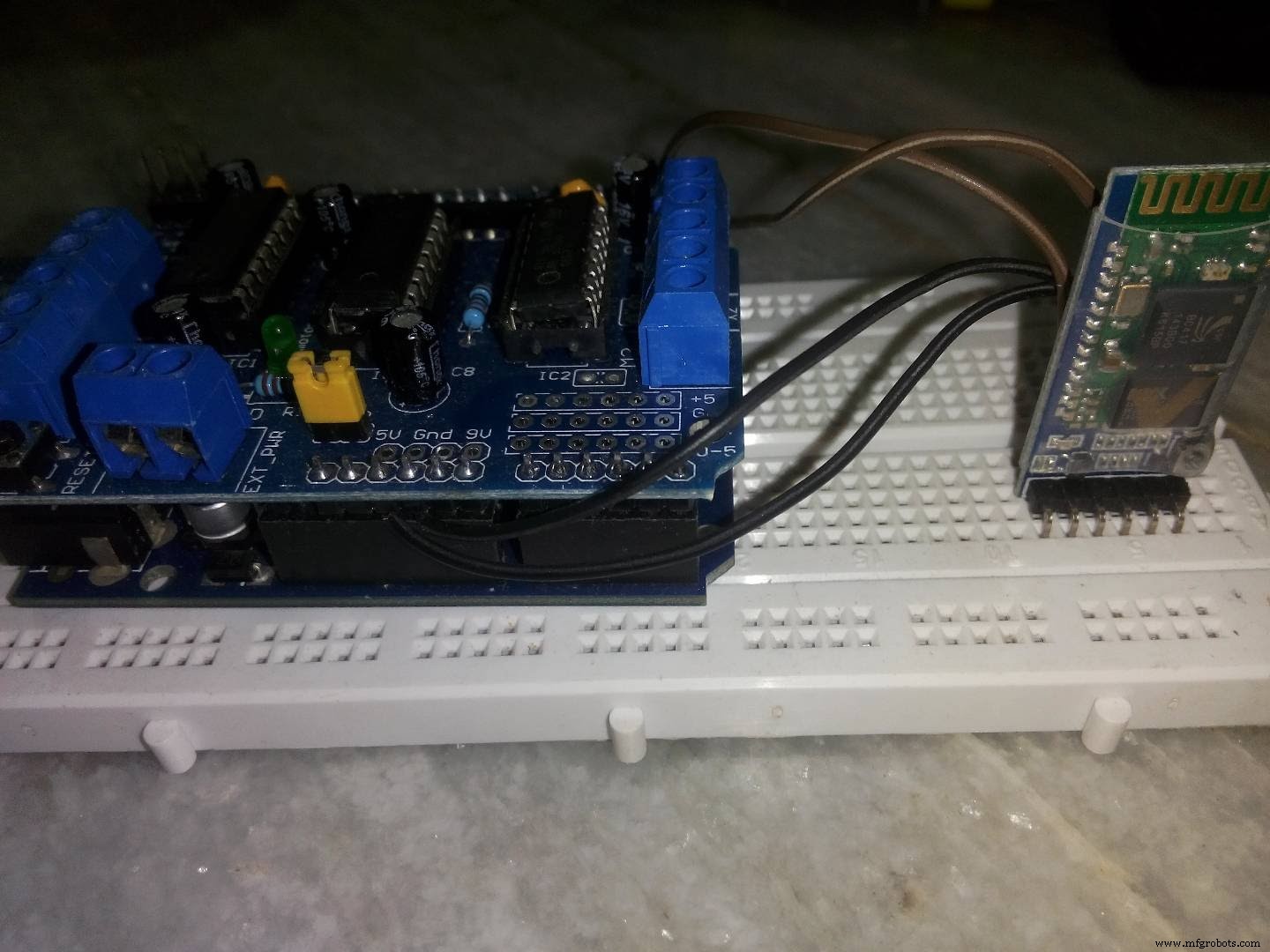
それでは、回路を構築しましょう
<図>
 <図>
<図> 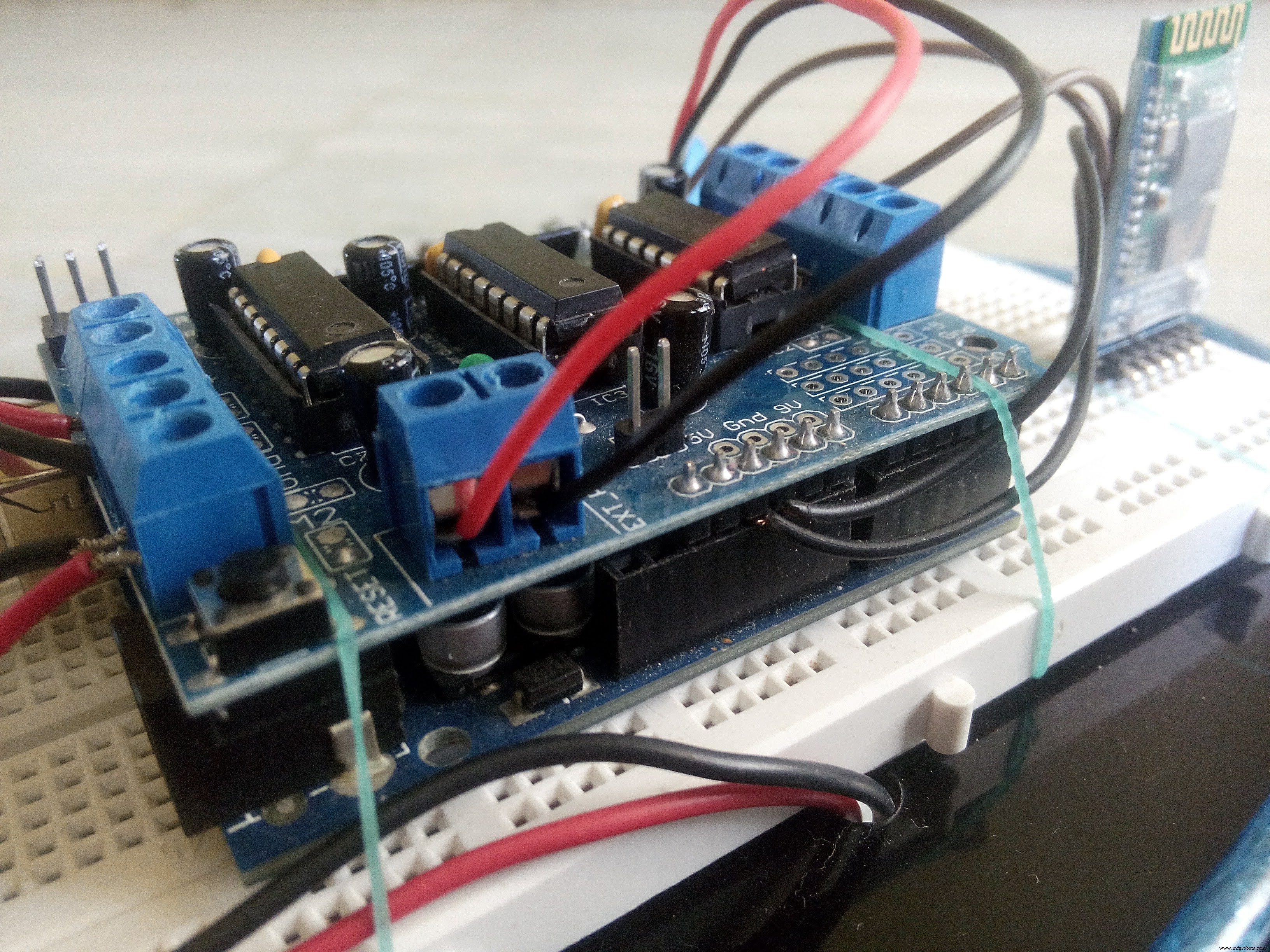 <図>
<図> 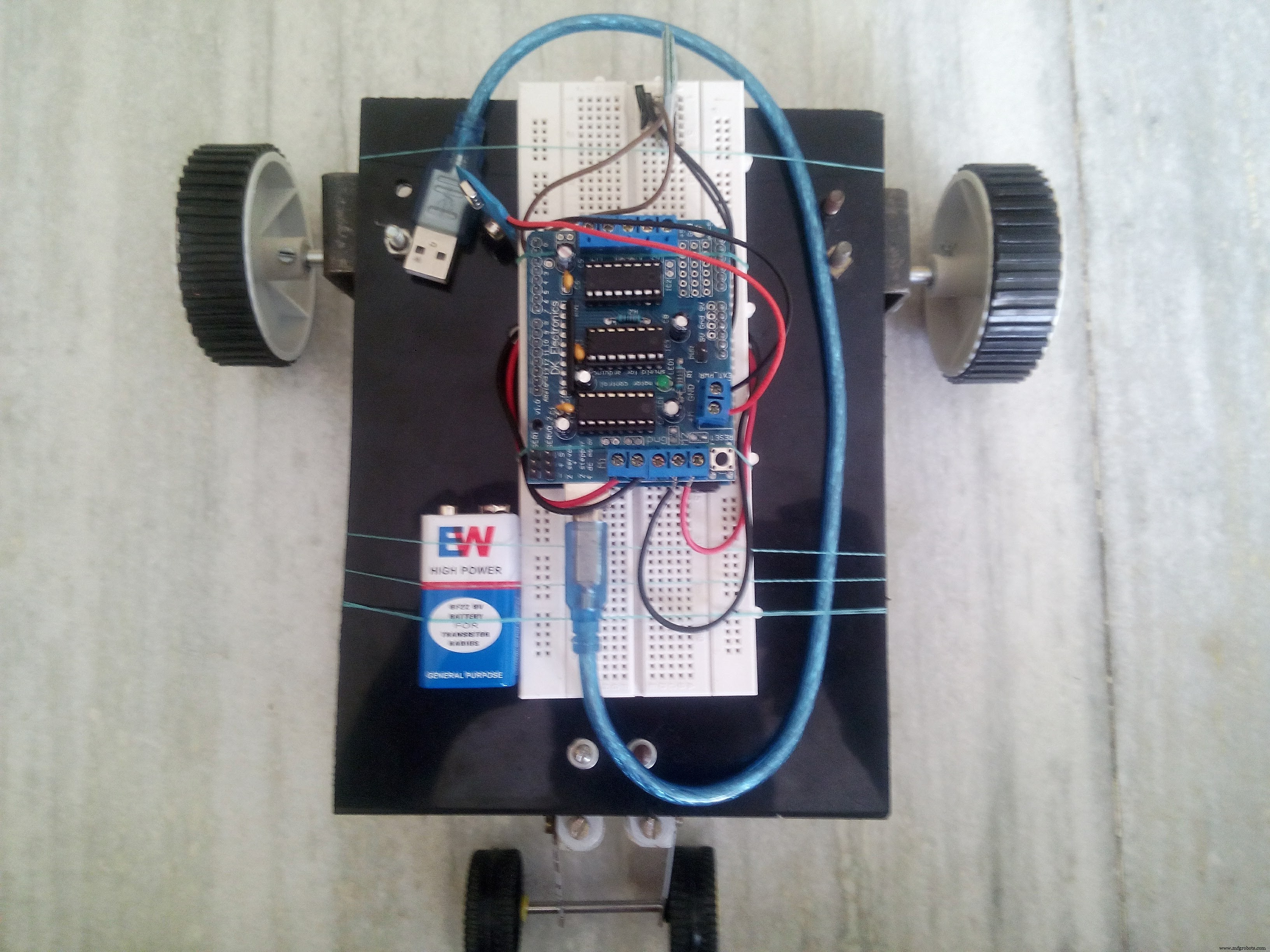
回路図に従って接続します。これは、すべての接続が確立された後の外観です。
->電源
これは少し重要です。
Arduino Unoに電力を供給するために、5v出力電圧のパワーバンクが使用されます。これは、これらの12vDCモーターを駆動するのに十分ではありません。したがって、追加の電源が必要です。
私は18Vの供給を得るために2つの9V電池を直列に使用しました。ここでの主な問題は、ここでもかなりの量の電流が必要であるということでした。
私のバッテリーは十分な電流を供給することができなかったので、この車の性能は100%満足のいくものではありませんでした。動作していましたが、モーターは非常に低速で動作していました。
したがって、12vバッテリーを使用することをお勧めします。そうしないと、速度に妥協する必要があります。
->コード
ここでは、モーターの回転方向を使用して車の方向を制御します。
前方-両方のモーターが前方に移動します
後方-両方のモーターが後方に移動します
左-左モーターが後方に移動し、右モーターが前方に移動します
右-左モーターが前方に移動し、右モーターが後方に移動します
停止-両方のモーターが停止します
void forward(){motor1.run(FORWARD); motor2.run(FORWARD);} void back(){motor1.run(BACKWARD); motor2.run(BACKWARD);} void left(){motor1.run(BACKWARD); motor2.run(FORWARD);} void right(){motor1.run(FORWARD); motor2.run(BACKWARD);} void Stop(){motor1.run(RELEASE); motor2.run(RELEASE);}
----------------------------------------------- ---------------------------------------
以上です!
1.コードをArduinoにアップロードするだけです。
2.接続します。
3.アプリを起動します。
4.スマートフォンを車に接続します。
これが完成したBEAUTYです!
<図>
 <図>
<図>  <図>
<図> 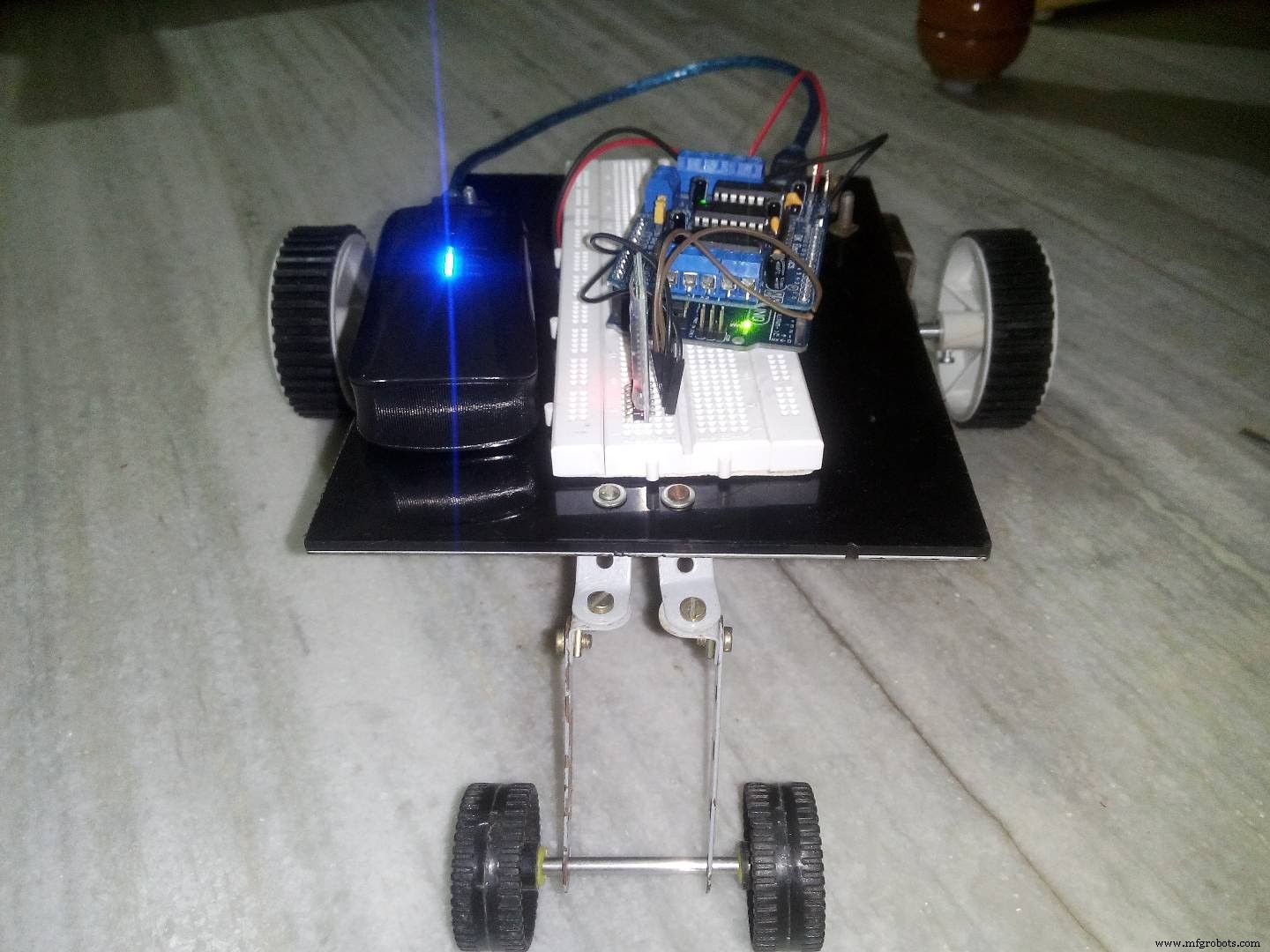 <図>
<図> 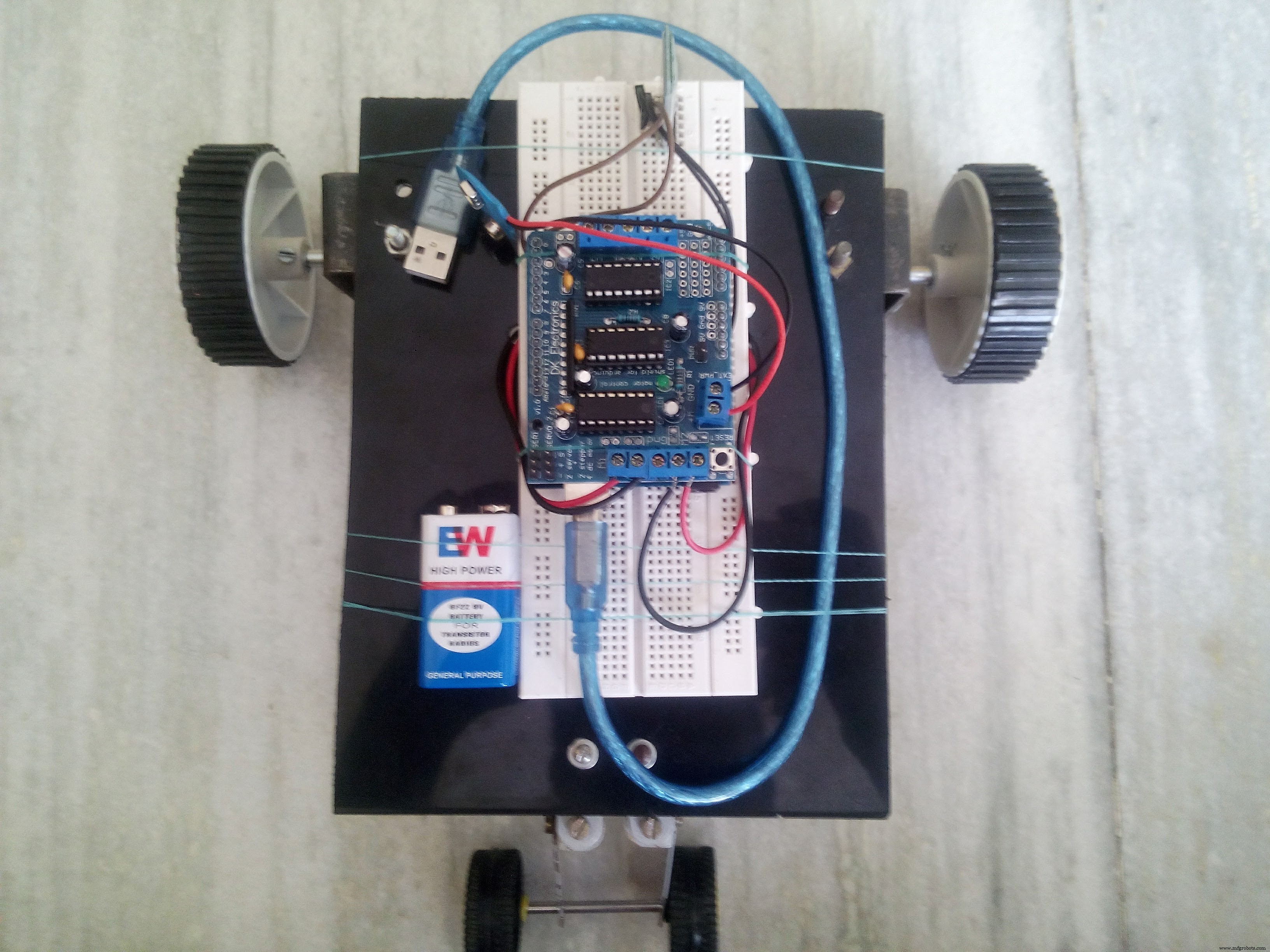 <図>
<図> 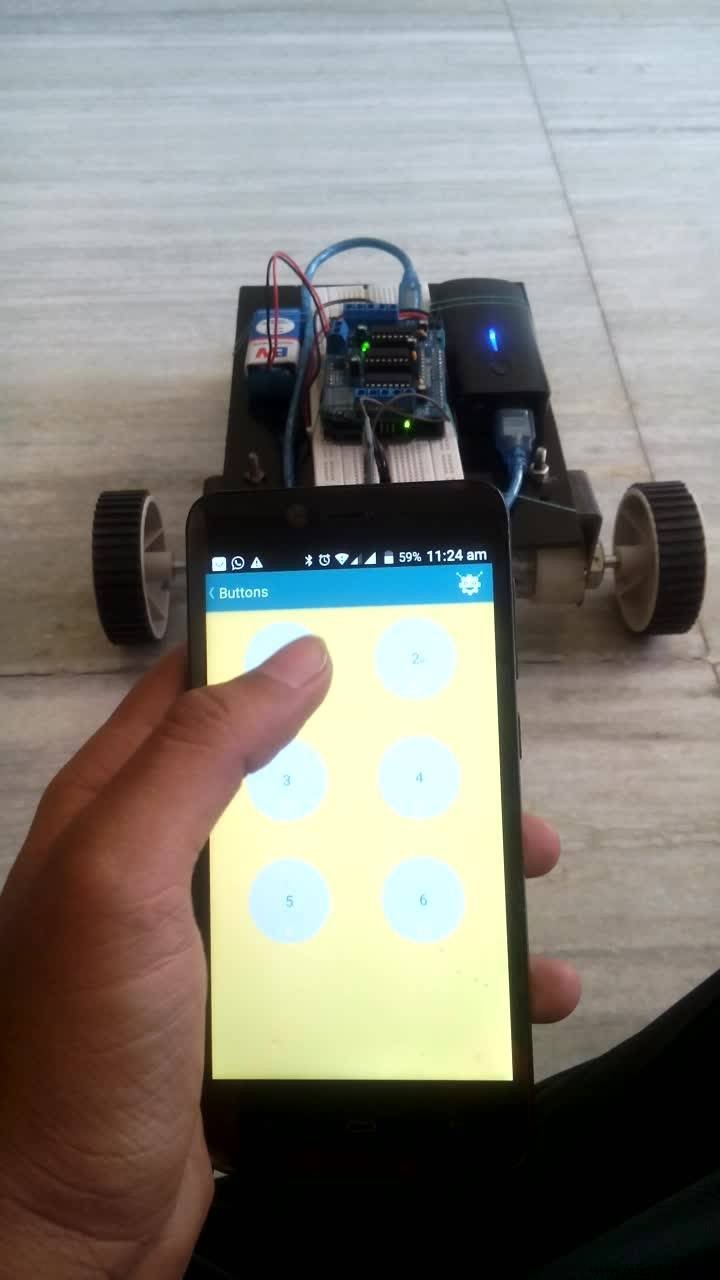
このチュートリアルがあなたを動かすのに十分であったことを願っています。このプロジェクトへの変更や追加について何か提案があれば、コメントセクションで知らせてください。
コード
- コード
コード C / C ++
このコードはArduinoUno#includeAF_DCMotor motor1(1);にアップロードする必要があります。 // motor1は左側のmotorAF_DCMotormotor2(2); // motor2は正しいmotorintval; void setup(){Serial.begin(9600); motor1.setSpeed(255); //モーター速度が設定されますmotor2.setSpeed(255); Stop();} void loop(){bt =Serial.read(); if(val =='1')// Bluetoothモジュールが1を受信すると、車は前進します{forward(); } if(val =='2')// Bluetoothモジュールが2を受信すると、車は後方に移動します{backward(); } if(val =='3')// Bluetoothモジュールが3を受信すると、車は左に移動します{left(); } if(val =='4')// Bluetoothモジュールが4を受信すると、車は右に移動します{right(); } if(val =='5')// Bluetoothモジュールが5を受信すると、車は停止します{Stop(); }} void forward(){motor1.run(FORWARD); motor2.run(FORWARD);} void back(){motor1.run(BACKWARD); motor2.run(BACKWARD);} void left(){motor1.run(BACKWARD); motor2.run(FORWARD);} void right(){motor1.run(FORWARD); motor2.run(BACKWARD);} void Stop(){motor1.run(RELEASE); motor2.run(RELEASE);}
回路図
これらは接続です。 12v電源をモータードライバーシールドに接続します。回路図には外部電源が含まれていないことに注意してください。 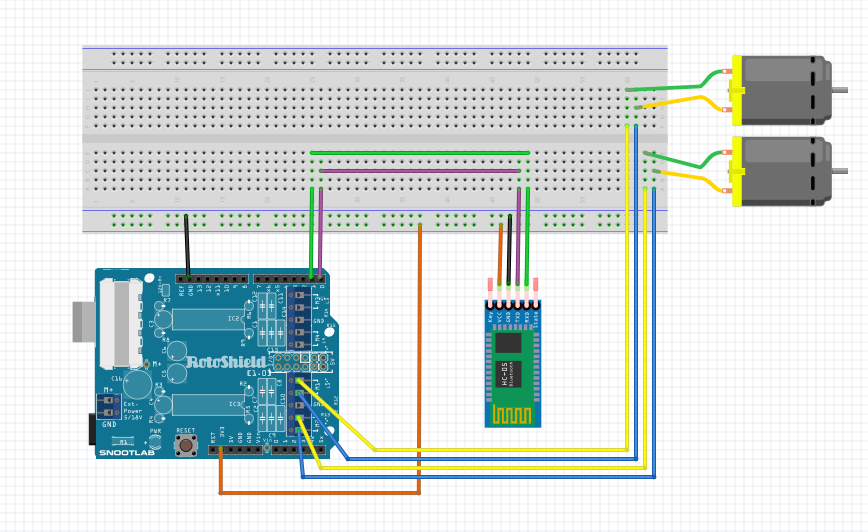
製造プロセス