


Matlab/SimulinkでのロボットグリッパーのPID制御
このチュートリアルでは、ロボットグリッパーメカニズムの3DモデルのPID制御を行う方法を説明します。 Simulinkモデルは2つのサブシステムで構成されています。 Simulinkブロックを使用したモデルであるDCモーターサブシステムと、SimMechanicsLinkを使用してSolidworksからインポートされた3Dモデル。ステップ関数を使用してDCモーターをアクティブにし、ロボットグリッパーを駆動し、SimulinkPIDブロックを使用してPIDのパラメーターを自動的に調整します。
次のビデオを見るか、以下のチュートリアルを読むことができます。
ここの例からSimulinkモデルをダウンロードします:
次のリンクでロボットグリッパーメカニズムの3Dモデルを見つけてダウンロードします: 
Simulinkモデル-PID制御
1ファイル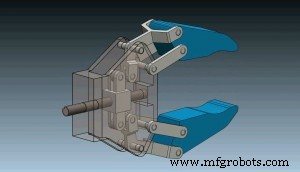
製造プロセス