


ロボット工学の未来
ロボット工学の未来は分散されています。複雑なロボットは、モジュールとシステムの分散セットであり、一部は自律型、一部は半自律型、一部は人間が制御し、すべてが緊密に連携して相互運用部品の単一のまとまりのあるシステムを形成します。テレロボティクスでは、ロボットのテレオペレーションを可能にし、人間のオペレーターにビデオと相互作用の力を提供することで、ロボットが配置されている場所にいるという人間の感覚をオペレーターに与えることを目指しています。
ESAの場合、これは宇宙または敵対的な惑星表面上を意味します。人間のオペレーターは宇宙ステーションにいる場合もあれば、地球に戻っている場合もあります!
これを行うために、オペレーターへの触覚力フィードバックと拡張現実ビデオの組み合わせにより、テレプレゼンスを有効にします。
ユーザーに視覚とタッチの両方のフィードバックを提供することで、テレプレゼンスが可能になります。フィードバックがより現実的で情報に基づいているほど、オペレーターのテレプレゼンスの知覚が大きくなり、リモートロボットの操作が向上します。
宇宙テレオペレーションのESAに対する重大な課題は、通信リンクです。ロボットには多くのリアルタイム制御ループがありますが、テレオペレーションシステムの人間とリモートロボットの間のループが最も問題があります。いくつかの制御ループは、最悪の通信動作を示すパケット交換ネットワークリンク上で実行されます。いつでも切断でき、遅延は数秒で測定でき、大きく変動します。さらに、パケット損失は定期的に発生します。これは、宇宙を越えた場合と同じように、インターネットを介した通信にも当てはまります。ただし、このリンクを介してすべてのビデオを送信する必要があります。時間は、ロボットの制御ステータスと両端の制御コマンドに関連付けられています。これは、リンクステータスが制御ループの不可欠な部分になり、オペレータが適切に反応し、リモートロボットが安全で安定した状態を維持できるように、両端で十分な情報を利用できるようにする必要があることを意味します。リンク状態は、システム状態の不可欠な部分になる必要があります。
ESAの開発チームは、メカトロニクスエンジニア、コンピュータービジョンのスペシャリスト、制御システムの理論家、および数人のソフトウェアエンジニアで構成されています。特に、複数のコンピューター、さまざまなハードウェアおよびソフトウェアプラットフォームを操作する複雑な分散システムを提供するように求められた場合、システムのニーズとインターフェイスについて話し合うための共通の方法を探す必要があることは、早い段階で明らかでした。私たちはデータに落ち着きました。データは、システムの状態を理解する手段、ビデオフレームを表現する手段、および制御理論を表現する手段と考えています。したがって、開発環境とシステム開発にデータ中心でアプローチすることは理にかなっています。テレオペレーションの一環としてリンクステータスを理解するという重大な必要性と相まって、私たちは容赦なくDDS(データ配信サービス)を評価するように導かれました。 NASAは、宇宙通信システムですでにDDSのヘビーユーザーでしたが、DDSは、このような困難なリンクを介したテレオペレーションを可能にし、実際に最も困難な接続をリアルタイムで制御できるようにすることもできますか?これは新しい未踏の科学的領域であり、そのためにさらにエキサイティングです。最初の兆候は非常に励みになります。
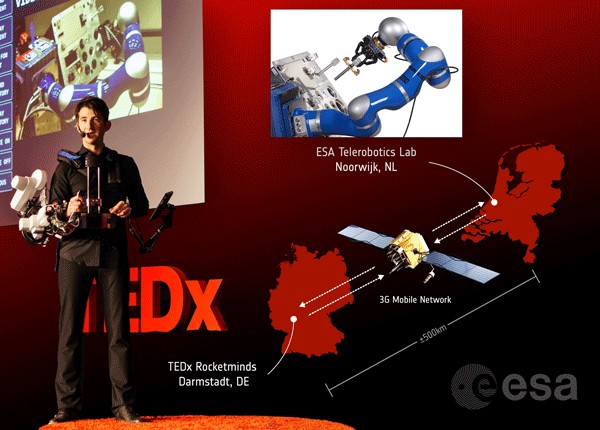
2014年5月のTEDxRheinMain RocketMindsでのこのライブデモでは、EXO-1エキソスケルトンアームのプロトタイプを使用して、ESAテレロボティクスに物理的に配置されたロボットアームをリモート制御しました。 &Hapticslabは500km以上離れています。私の仕事は、金属製のピンを拾い上げて、ギャップ許容値が0.5mm未満の穴に配置することでした。計画された3G接続が予期せず利用できなくなったため、デモ全体がインターネットベースの2G電話WAN接続を介して実行されました。ポケットに携帯電話を持っている人でいっぱいの密室では、帯域幅は厳しく制限されており、実際には宇宙で経験したタイプの接続を示していました。それよりも悪くなることはありません。15秒の範囲で遅延が発生し、データが大幅に失われたリンクを介してテレオペレーションします。それでも、2Gリンク上で実行されているDDSは、触覚フィードバック、ロボットアーム制御ループ、およびラボ内のロボットアームのビデオ(腕のタブレットにストリーミングされ、ローカルに複製されて表示される)のすべての通信を処理することができました。 TEDxのメイン画面)。
まだ宇宙にはないかもしれませんが、長距離の正確なテレロボティクス制御と、視覚と触覚フィードバックを備えた挑戦的なデータリンクは文字通り私たちの手の届くところにあり、これを幅広い聴衆に示しました。
更新 :Haptics-1実験は、NASAのバリーウィルモア宇宙飛行士によって国際宇宙ステーションに搭載されて実施されました。最初の事前テストは2014年12月30日に実行されました。 Haptics-1は、宇宙での初めてのロボットによる力のフィードバック実験です。おめでとう!続きを読む
初めて#hapticフィードバックが宇宙で使用されます!今日、@ Space_Station#haptics-1は正常に実行されています! pic.twitter.com/30zD5GzGqs
— ESATelerobotics(@ESATelerobotics)2014年12月30日
共有したいConnextDDSの使用についての話がある場合は、blogadmin @ rti.comまでメールでお問い合わせください。
モノのインターネットテクノロジー