


オフライン プログラミングのトップ 10 タスク
あなたの仕事はオフライン プログラミングに適していますか?オフライン プログラミング ソフトウェアで可能な上位 10 のロボット タスクを見ていきます。
新しいテクノロジーに関する共通の懸念は、「しかし、それは私の固有の状況で機能するでしょうか?」という質問に含まれています。
オフライン プログラミングも例外ではありません。人々はその利点をすぐに理解しますが、自分の特定のタスクには適用できないのではないかと心配することがあります。私たちは彼らの懸念を理解しています。ビジネスは人それぞれで、オフライン プログラミングのようなテクノロジーが自分に最適かどうかを判断するのは難しい場合があります。
ただし、あなたの状況は独特ですが、あなたのロボット アプリケーションと私たちが常に目にする他のアプリケーションとの間には類似点があります。オフライン プログラミングは、多くのロボット タスクに使用できます。
この記事では、オフライン プログラミングを使用できるかどうかを決定する要因について説明し、RoboDK での上位 10 のタスクをリストします。
タスクがオフライン プログラミングを使用できるかどうかを決定するもの
ロボットでタスクを実行できる場合、ほぼ確実にオフライン プログラミングを使用してプログラミングできます。ただし、プログラミングの実行がどれほど簡単か (または難しいか) を決定する要因がいくつかあります。
5 つの重要な要素は次のとおりです。
- ソフトウェア機能 — すべてのオフライン プログラミング ソフトウェアが同じというわけではありません。一部のパッケージは特定のロボット メーカーから提供されているため、これらのブランドに固定されており、一部のタスクのサポートはさまざまです。
- ロボットの互換性 — 一部の製造元はオフライン プログラミング ソフトウェアを提供していません。これは、製造元のソフトウェアに依存している場合に問題になります。ロボットを評価する方法のヒントについては、次の記事を参照してください:オフライン プログラミングは私のロボットで動作しますか?
- ロボット モデルの入手可能性 — 使用しているオフライン プログラミング ソフトウェアでロボット モデルを使用できることを確認する必要があります。 30 を超えるロボット メーカーの 300 を超えるモデルについては、ロボット ライブラリを参照してください。
- 専門知識のレベル — 一部の従来型のオフライン プログラミング (自動車産業など) には、使いにくい複雑なソフトウェア ツールが含まれます。一方、RoboDK のようなソフトウェアを使用すると、ロボットをオフラインで簡単にプログラミングできます。その結果、必要な専門知識は以前よりもはるかに少なくなります。
これらの要因のほとんどは、適切なオフライン プログラミング ソフトウェアを選択することで克服できます。
オフライン プログラミングのトップ 10 タスク
オフライン プログラミングを使用して、同じまたは類似のタスクを実装している人をよく見かけます。作業を楽にするために、最も一般的なタスクのリストと、オフライン プログラミングを使用してそれらを実装する方法の説明をまとめました。
例のページで、RoboDK でこれらのタスクをプログラミングする方法の対話型シミュレーションとチュートリアルを見つけることができます。
1.ロボット加工
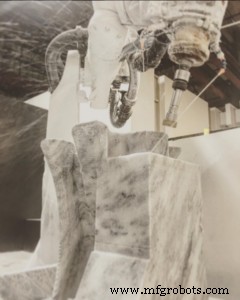
これまで、自動フライス加工と機械加工は CNC マシンで行われる傾向がありました。ロボットが関与する場合、通常は機械の手入れにのみ使用されます。
しかし、最近では機械加工自体にもロボットが使用され始めています。産業用ロボットの精度が向上し、オフライン プログラミングがより直観的になったことで、CNC コードをロボットの命令に簡単に変換できるようになりました。
RoboDK のユーティリティ メニューには、専用のロボット加工ツールが含まれています。このリンクでデモンストレーションを参照してください:RoboDK Machining.
2.ピックアンドプレイス
おそらく最も一般的なロボット タスクは、ワーク セルのある部分から別の部分にオブジェクトを移動するピック アンド プレースです。このようなタスクは、オフライン プログラミングを使用して非常に簡単にプログラミングできます。以前の記事で説明したように、簡単なピック アンド プレース タスクを 15 分以内にプログラムすることができます。
次のリンクでデモンストレーションをご覧ください:RoboDK Pick and Place.
3.ロボット塗装
一般の人々に産業用ロボットのタスクをいくつか挙げるように頼んだら、ロボット塗装が彼らのリストの上位に来るに違いありません。ペイントは最も典型的なロボット アプリケーションの 1 つであり、オフライン プログラミングを使用して簡単に行うことができます。ソフトウェアはツール パスを数分で生成できます。

次のリンクでデモンストレーションをご覧ください:RoboDK ペインティング。
4.ロボットスポット溶接
オフライン プログラミングは、スポット溶接用のプログラムを生成するために長い間使用されてきました。しかし、これまでは、困難なシミュレーションに何時間もかかり、専門のプログラマーが必要でした。新しいソフトウェアでは、スポット溶接プログラムをエラーなしで簡単に生成できます。
次のリンクでデモンストレーションをご覧ください:RoboDK Spot Welding.
5. 3D プリント
3D プリントは、21 世紀を代表するテクノロジーの 1 つです。 3D プリントのアプリケーションは、しばらく前から存在していましたが、過去 10 年間で爆発的に増加しました。最も興味深い最近の開発の 1 つは、ロボット自体を 3D プリンターとして使用することです。オフライン プログラミングにより、これを非常に簡単に実現できます。

RoboDK の [ユーティリティ] メニューには、専用の 3D 印刷ツールが含まれています。このリンクでデモンストレーションを参照してください:RoboDK 3D 印刷。
6.コンベアピッキング
コンベアは、さまざまな付加価値プロセス間でオブジェクトを搬送するために、多くの業界で使用されています。ただし、多くの場合、ロボットとの統合は困難です。オフライン プログラミング ソフトウェアがそれらをサポートしている場合 (RoboDK のように)、オンライン統合の時間を大幅に節約できます。

次のリンクでデモンストレーションをご覧ください:RoboDK Conveyor Picking.
7.自動検査
マシン ビジョンを使用した検査は、ロボットの一般的なアプリケーションになっています。その理由は明らかです。手作業による検査は、生産性が上がるにつれて増加する骨の折れる作業です。マシン ビジョンのオフライン プログラミングは、オンライン プログラミングを完全に置き換えることはできませんが (実際の画像を使用してカメラをトレーニングする必要があるため)、統合プロセスをスピードアップするのに役立ちます。

このリンクでデモンストレーションを参照してください:RoboDK 自動検査.
8.描画
ロボットにとって、絵を描くことは軽薄な活動のように聞こえるかもしれません。ただし、多くの便利なアプリケーションがあります。ロボットを使用して、ケーキにアイシング パターンを描画したり、フライス ツールを使用して芸術的な輪郭をカットしたり、製品に手書きスタイルでペイントしたりできます。オフライン プログラミングにより、SVG 画像 (ベクター イメージングの標準) をロボット パスに簡単に変換できます。
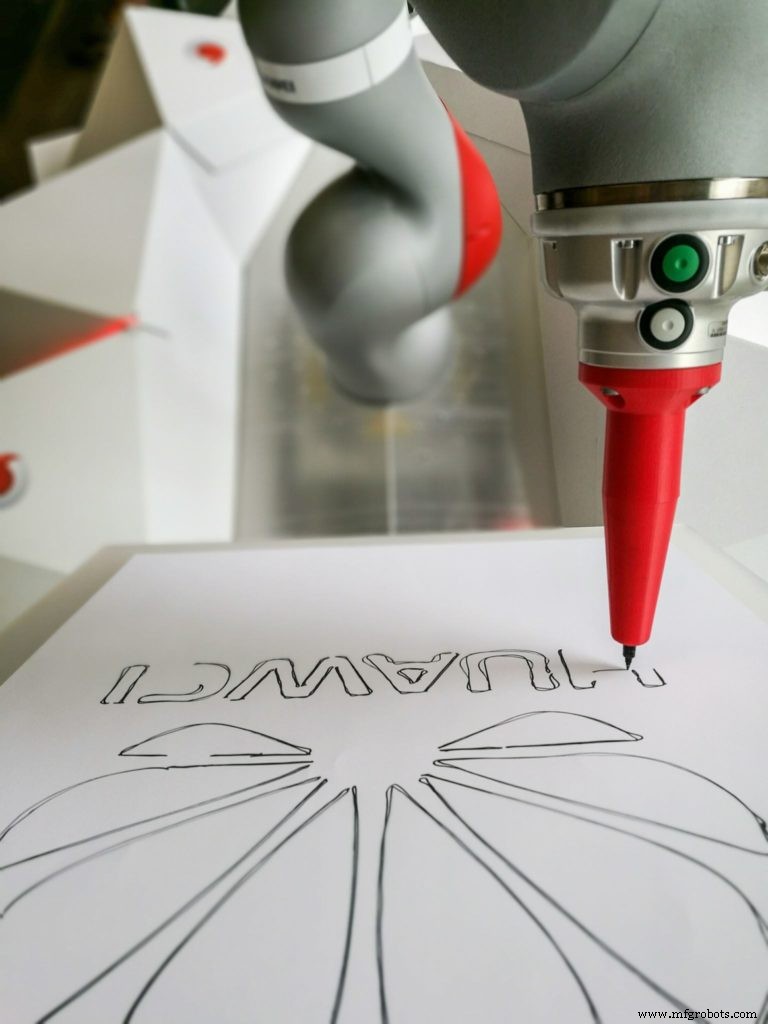
このリンクでデモンストレーションを参照してください:RoboDK Drawing.
9.外部軸の統合
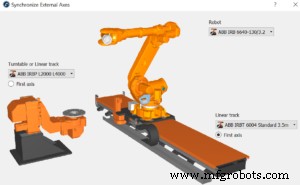
これは実際には「タスク」ではありません。ロボットで達成できるタスクの範囲を改善するためのテクニックのようなものです。外部軸を使用すると、塗装、スポット溶接、検査などのタスクのためにロボットのワークスペースを拡張できます。これらは基本的に、ロボットに追加された 1 つまたは 2 つの自由度です。唯一の問題は、ロボットと同期する必要があることです。オフライン プログラミングでは、この同期は簡単です。
RoboDK のユーティリティ メニューには、外部軸専用の同期ツールが含まれています。次のリンクでデモンストレーションを参照してください:RoboDK Machining With External Axis.
10.ロボットにできることは何でも…OLPにもできる
タスクがここにリストされていなくても、オフライン プログラミングで達成できる可能性があります。よくわからない場合は、お気軽にお問い合わせください。特定のタスクについて質問するか、以下にコメントを投稿してください。
オフライン プログラミングの使用を開始する最善の方法は、ソフトウェアをダウンロードして自分で試してみることです。このリンクから無料の試用版をダウンロードしてください:RoboDK をダウンロードしてください。
産業用ロボット