


ロボット軸カップリングが生産を台無しにする可能性があります
ロボットの約 10% ~ 20% がこのあまり知られていない機能を備えています。準備ができていないと、プログラミングが台無しになる可能性があります。
先日、新しいロボティクスのコンセプトについて学びました... ロボット軸の結合.
RoboDK の CEO である Albert Nubiola 氏は次のように述べています。
彼は正しかったです!軸結合についてはほとんど書かれていません。さらに、私は 10 年近くロボット工学の専門家であるという事実にもかかわらず、この少し変わった機能に気づいていませんでした.
ロボットの軸結合について聞いたことがなくても、心配はいりません。あなたは一人ではありません。
軸結合は悪い機能ではありません。実際、それにはいくつかの利点があります。ただし、準備ができていないと、プログラミングに影響を与える可能性があります。 Albert は、産業用ロボットの 10 ~ 20% が軸結合の影響を受けると推定しています。
軸結合とは?
軸結合は、ロボットの 2 つ以上のジョイントがリンクされている場合です。それらは物理的にリンクするか、並列リンケージを使用するか、制御ソフトウェアでリンクすることができます。
実際の軸結合の説明は次のとおりです...
軸結合なし:ほとんどの 6 DoF ロボット
まず、Comau Smart NJ 16-3.1 などの古典的な 6 自由度 (DoF) の産業用ロボットを見てみましょう。
最新の 6 DoF ロボットのほとんどでは、次のことが当てはまります:
- 各関節は物理的に独立しています。
- 各関節は、他の関節に影響を与えることなく独立して制御できます。
- 各関節のモーターは関節自体にあります。
ほとんどの 6 DoF ロボットには、軸結合はありません。これにより、制御が非常に簡単になります — ジョイント (ジョイント 3 など) をある量だけ動かすと、そのジョイントだけが動きます。
軸結合:一部のロボット
軸結合を備えたロボットを見てみましょう:Comau Smart5 NJ-165-3.0
Comau は、軸結合を備えた複数のロボットを製造しています。これは、軸結合を備えた 6 DoF ロボット モデルの 1 つです。 Comau のすべてのパレタイジング ロボットにもこの機能があります。
以下は、このロボットに当てはまります:
- ジョイント 2 と 3 のモーターは、どちらもロボットのベースにあります。
- 関節 3 は、2 つの関節を物理的にリンクする平行リンク機構によって動かされます。
- 第 2 関節が動くと第 3 関節も動きます。その逆も同様です。
これは、これらのロボットの制御とプログラミングにわずかに影響します。通常、それぞれが 6 つのジョイントの目的の位置に対応する 6 つの値を送信して、6 DoF ロボットをプログラムします。軸結合では、ロボットの 2 つの関節が依存しているため、これはさらに困難になります。
アクシス カップリングの大きなメリット:高いペイロード
軸結合がそれほど問題である場合、なぜそれを使用する必要があるのでしょうか?
状況によっては、従来の 6 DoF ロボットよりも軸連結型ロボットを使用する大きな利点が 1 つあります。それは、ペイロードが大きいことです。
例として Comau NJ-165 (軸結合) と NJ-16 (従来の 6 DoF) を見てみましょう:
| スマート NJ-1-3.1 | スマート 5 NJ-165-3.0 | |
| タイプ | 従来の 6 DoF | 軸結合 6 DoF |
| リーチ | 3.11 m | 3.00 m |
| 再現性 | 0.1mm | 0.1mm |
| ペイロード | 16kg | 165 kg |
| 体重 | 680 kg | 1240 キロ |
ご覧のとおり、これら 2 つのロボットはリーチと再現性が非常に似ています。ただし、ペイロードに関しては大きく異なります。
軸結合を備えたロボットは、従来の 6 DoF ロボットの 10 倍以上のペイロード容量を備えています!
これは非常に理にかなっています。ロボットのペイロード容量の多くは、ジョイント 2 と 3 のモーターから得られます。通常、ジョイント 2 のモーターは、強力なジョイント 3 モーターの重い重量もサポートする必要があります。このモーターをロボットのベースに追加することで、Comau はジョイント 2 に過度に強力なモーターを必要とせずに、構造をより大きく、より強くすることができます。
どのタイプのロボットが軸結合を使用していますか?
軸結合を使用するロボットには、主に 3 つのタイプがあります。
- パレタイジング ロボット — 多くのパレタイジング ロボットには、より高いペイロードを持つことができるため、軸結合があります。
- 高ペイロード 6 DoF ロボット — Comau、Fanuc、および ABB の最高ペイロード ロボットはすべて、より高いペイロードを持ち上げるのに役立つ軸結合を備えています。一部 (例:ペイロード 800 kg の KUKA IRB 8700-800/3.50) では、パラレル リンクにカウンターウェイトが取り付けられており、重いペイロードのバランスをとっています。
- 薄いロボット — いくつかの薄いロボットは、その薄い構造を説明するために軸結合を使用します。
ロボットに軸カップリングがあるかどうかを確認する方法
ロボットが軸結合を使用しているかどうかを確認することは、RoboDK を使用していない限り、必ずしも簡単ではありません。
私たちの知る限りでは、RoboDK は軸結合を正確に説明できる唯一のブランドにとらわれないソフトウェアです。
ロボットが RoboDK で軸結合を持っているかどうかは、次の 2 つの方法で確認できます。
<オール>一部のロボットでは、ロボットの基部からジョイント 3 までの平行リンケージを見ることができるため、ロボットに軸結合があることが簡単にわかります。また、ジョイント 3 にはモーターが取り付けられていません。
一部のロボットには、ジョイント 5 と 6 の間にギアボックス カップリングもあります。
特定のロボット ブランドのヒント
ロボットを使用した経験から、3 つのロボット ブランドに関するいくつかのヒントを以下に示します。
- FANUC はすべてのモデルで軸結合を使用します。結合がソフトウェアで適用される物理結合のないモデルも含まれます。
- ABB は、軸カップリングを備えた一部のロボットの詳細なマッピングも提供しています。
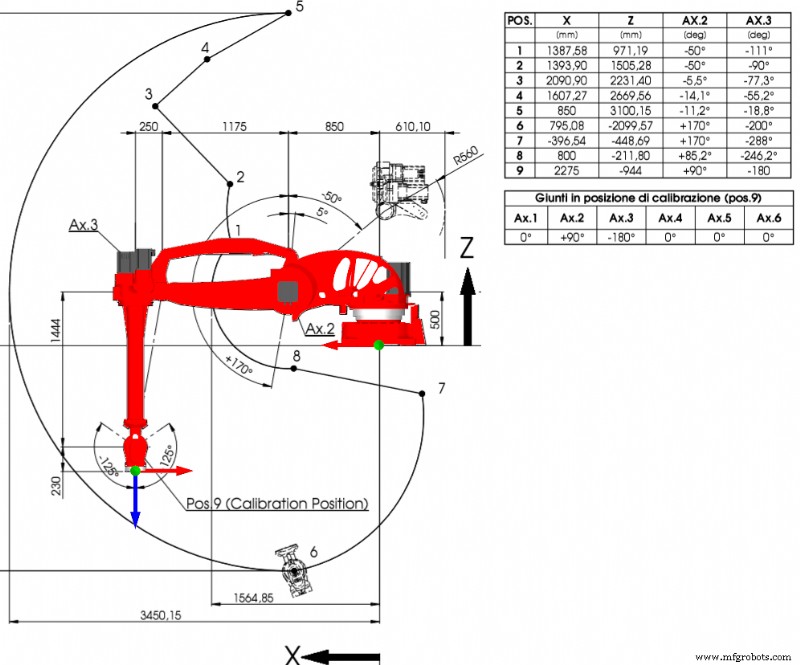
- Comau は、すべてのロボットのデータシートで軸結合の詳細なマッピングを提供しています。たとえば、このデータシートのロボットのさまざまな位置に対するジョイント マップの制限 (軸 2 および 3) を参照してください。一部のロボットには、軸結合のために 1 つのジョイントが制限される「デッド ゾーン」もあります。説明されているワークスペースにより、相互作用をジョイント 2 対ジョイント 3 チャートとして正確にモデル化および表示できます。
そのため、RoboDK でロボット モデルを開き、軸結合があるかどうかを確認してみてください。
その場合は、RoboDK がすべてを処理し、軸結合によってプログラミングが台無しになることはありません!
産業用ロボット