


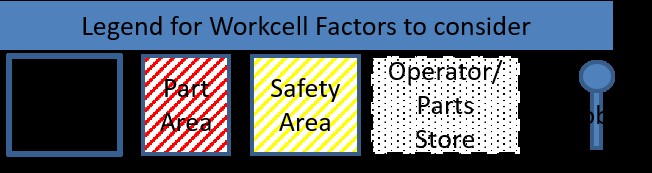
生産的な溶接スペースを最大化する
無駄を減らし、ワークフローを改善するための無駄のない製造の原則に基づいて設計されたロボット アーク溶接ワークセルは、さまざまな業界にまたがる多くの産業用途に精度、信頼性、汎用性、および速度を提供できます。一部のメーカーは、市場で最も効率的なロボット ワークセルはフットプリントが最小のものであると主張しますが、考慮すべき他の要因があります。これは、貴重なフロアスペースを最も効率的に使用するにはどうすればよいでしょうか?
メーカーが特定の投資回収期間中に最大の投資利益率 (ROI) を得るためには、特定のアプリケーションと部品タイプを処理するために可能な限り最も効率的なワークセルを使用することが不可欠です。最近の購買傾向は、追加のロボットを備えたより大きなロボット ワークセルを購入することが、企業がスループットを向上させ、製品の品質を向上させ、その過程で労働力不足を満たし、顧客の要求を満たすためのより生産的なソリューションになる可能性があることを示唆しています。
多くのアジアを拠点とする製造業者は、フットプリントが小さいロボットワークセルが最適であると強調していますが、米国の企業は一般的に床面積にはあまり関心がありません。しかし、製造業者が生産性向上のためのイニシアチブを実行しようとするにつれて、この考え方は変わりつつあります。 Yaskawa は、ArcWorld ® の一部であるさまざまな標準溶接ワークセルを製造しています。 シリーズ。これらのセルを使用して、床面積の生産性に寄与する 6 つの要因を説明できます。さらに、これらの要因は、最近の購入傾向を説明し、工場の床面積から生産性を高める原動力を評価するのにも役立ちます。
考慮すべき 6 つの重要な要素:
ワークセル効率の答えは、特定の要因を比較し、単純な比率を見直すことにあるかもしれません。ロボットのワークセルの生産性を評価するために、メーカーは以下を考慮する必要があります:
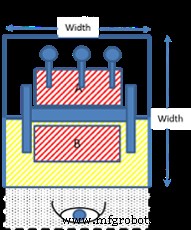
部品面積は、製品を支えるために必要なスペースです。たとえば、自動車のシート サプライヤーは、サブアセンブリ用のリクライニング ブラケット、フロント シート、および 60/40 に分割されたリア シート フレームの間に明らかなサイズの違いがあります。金型を使用して高品質の部品を効果的かつ効率的に生産するには、十分な部品面積を確保することが重要です。パーツの配置もポイントです。パーツの向きを変える必要がある場合は、より大きな 3 次元ボリュームが必要になります。
これは、ワークセルのフットプリント全体のサイズ、またはロボット システムが取り囲む工場フロアの床面積を指します。製造業者は、床面積をより効率的に使用するために、セルが小さいと見なす場合があります。セルのフットプリントは考慮すべき有効な懸念事項ですが、フットプリントだけに基づいてロボット システムを選択することは理想的ではありません。同様に、単一ステーションのワークセルは、2 つのステーション セルと比較する場合、ペアとして評価する必要があります。
安全規制に準拠するためにオペレータがポジショナの割出し中に立ち退かなければならないオープン スペースは、安全領域として知られています。一部のメーカーは、安全領域のスペースを最小限に抑えるために、ロールアップ ドアを備えたロボット ワークセルをカスタマイズします。この領域内の小さなパーツ用にパーツ ビンを吊り下げると、このスペースを利用して人間工学を改善するのに役立ちます。
オペレータ エリアとは、オペレータが部品をつかんだり、セル ツールに配置したりするスペースを指します。安全スペースを備えたセルは、オペレーターを部品保管庫で混雑させる可能性があり、単一のステーション作業セルに広い通路を装備する必要があります。単一ステーションのワークセルが互いに向かい合って配置されることがあるため、オペレーターは 1 つをロードしてから、通路の反対側でセルをサービスします。
ロボット ソリューションを選択する際には、作業セル内のアーク溶接ロボット (作業用トーチを指す「アーク」) の数も重要です。 2 台目または 3 台目のロボットを追加することで、床面積にほとんどまたはまったく影響を与えずに、溶接生産をほぼ 2 倍または 3 倍にすることができます。これにより、特定のワークセルの「アーク密度」が増加します。
ワークセルの価格は、設計および実装のどの段階でも考慮されます。多くの場合、ポジショナー、セル制御、ツーリングが含まれている場合、ロボットはコストに占める割合が小さくなります。レーザーセンサーなどの他のアイテムも、コストを増加させますが、サイクルタイムを改善する可能性があります。非常に効率的なセルを作成する際に、お客様の部品とスループットの要件によって、これらのコストを追加する機能をどの程度評価できるかが決まります。
アプリケーション
特定の用途と部品タイプに対して最も生産性の高いワークセルを選択する場合、メーカーはワークセルの効率に影響を与える重要な要因を比較として評価する必要があります。例:
- パーツ面積 / ワークセル面積 =パーツとワークセル面積の比率
- パーツ / ワークセル X アーク ロボットの数量 =アーク密度またはワークセルの生産性比率
- 床面積とアークの数に対する $ の比率 =値の比率
- 統合コスト (ワークセルごとに 1 倍):PLC +HMI + 電源ドロップ + ツール + など

例 1: ジョブ ショップや自動車会社は、ArcWorld C-52 (AWC-52) を検討する場合があります。これは、2 つのフラット テーブル ステーションを備えた少量から中量の製造向けのコンパクトなワークセルです (AWC-52S には旋削部品用の主軸台があります)。このセルは、次の特長を備えたコンパクトなパッケージで強力なパフォーマンスを提供します。
- 縮小された床面積
- 1 台の 6 軸 Motoman ® ロボット
- ロールアップ ドア
- 統合溶接パッケージ
- パーツの最大サイズ (mm) 760 x 700 容量
セルの生産能力を評価する際に、アーク溶接ロボットの数も評価されました。部品面積とロボットの比率を計算し、それをアークの数と比較した後、AWC-52 ワークセルの生産性比率は、ロボットが 1 台の場合でも 12% 効率的であることがわかりました。エントリー コストが低く、立ち上げ時間が短く、設置面積が小さく、保護機能が容易であるにもかかわらず、このワークセルは、比較が行われる一部のメーカーにとって不十分である可能性があります。
同様に、コンパクトなシングル ステーション ワークセルは、2 ステーション セルと比較して、ペアとして評価する必要があります。このタイプの構成では、プロセスに追加のアーク溶接ロボットが追加されますが、オペレーター エリアにより多くのスペースが追加されます。このワークセルはポジショナーのスイープ時間を排除しますが、オペレーターは歩かなければならず、人間工学的に劣り、サイクル時間が長くなる可能性があります.
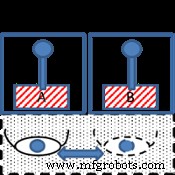 メーカーによっては、これらのセルを互いに向かい合わせに配置し、オペレーター スペースを 1 人のオペレーターが担当します。これにより、2 台のロボットとパーツ/ワークセル領域に基づいて、生産性比率を最大 30% まで高めることができます。 2 つのセルを使用すると、統合コストが 2 倍になり、自動化されたツールを使用する自動車メーカーにとってはかなりの額になる可能性があります。
メーカーによっては、これらのセルを互いに向かい合わせに配置し、オペレーター スペースを 1 人のオペレーターが担当します。これにより、2 台のロボットとパーツ/ワークセル領域に基づいて、生産性比率を最大 30% まで高めることができます。 2 つのセルを使用すると、統合コストが 2 倍になり、自動化されたツールを使用する自動車メーカーにとってはかなりの額になる可能性があります。
例 2: 位置決めを必要としない小さな部品を溶接するためのワークセルを探しているメーカーは、より大きな ArcWorld 1000 (シングル ロボット構成) または ArcWorld 1200 (デュアル ロボット構成) を検討することができます。中規模から大量の溶接用途向けの小規模から中規模の部品生産用に事前に設計されたこれらの ArcWorlds の機能:
- 高速サーボ ターンテーブル (60 インチまたは 72 インチ テーブル トップ)

- 1 台または 2 台の 6 軸 Motoman ロボット
- 機能安全ユニット (FSU)
- 統合溶接パッケージ
- パーツの最大サイズ (mm) 1,000 x 474 容量
同じサブアセンブリ比較を使用して (例 1 を参照)、AW1000 セルは、部品面積とワークセル面積の比率を使用して 10% 効率的であることがわかりました。高速サーボターンテーブルを導入したにも関わらず、セーフティーエリアの存在が稼働時に使えない「デッドスペース」を生み出していた。良い面としては、オペレータ エリアはオペレータの動きを最小限に抑え、より優れた人間工学を生み出しました。
パーツ面積とワークセル面積の比率に関連してアーク密度を計算すると、この構成 (AW1200) に追加のアーク溶接ロボットを追加すると、全体的な溶接強度が向上することが明らかになりました。ワークセルの生産性が 19% に。他の ArcWorld ワークセルの定価を比較すると、AW1200 はすべてのワークセルの中でアークあたりの価格が最も低く、お買い得です。このセルの統合コストは 1 倍です。
例 3: 当社で最も人気のあるワークセル、観覧車ポジショナーを備えた AWIV-6000 シリーズは、床面積を最も効率的に使用します。中規模から大量の部品生産用に事前に設計されたこれらの機能:
- 高速容量、省スペースのスリムライン ポジショナー
- 1 台、2 台、3 台、または 4 台の 6 軸 Motoman ロボット
- 機能安全ユニット (FSU)
- 統合溶接パッケージ
- 最大部品サイズ (mm) 4,000 および 1,525 容量
同じ床面積効率の比較 (例 1 と例 2 を参照) を使用すると、ArcWorld IV-6000 シリーズ セルは、パーツ面積とワークセル面積の比率を使用して 30 ~ 34% 効率的であることがわかりました。部品領域とワークセル領域に関連して高速でスリムなポジショナーを追加することで、セルの効率が向上しましたが、安全領域の存在により、操作中に使用できない「デッド スペース」が作成されました。一部の製造業者は、ロールアップ カーテンを使用して安全領域をスパンし、ライト カーテンが使用する距離を短縮しています。
ArcWorld C シリーズおよび ArcWorld 1000 シリーズのワークセルの例と同様に、アーク溶接ロボットの存在により、各セルの生産性が向上しました。 ArcWorld IV-6000 シリーズの各セルのパーツ面積とワークセル面積の比率に関連してアーク密度を計算すると、次のような結果が得られました。
- AWIV-6000SL 部品面積 / ワークセル X 1 アークロボット =生産性比 60%
- AWIV-6200SL 部品面積 / ワークセル X 2 アーク ロボット =67% の生産性比
- AWIV-6300SL 部品面積 / ワークセル X 3 アーク ロボット =100% の生産性比
パーツ面積とワークセルの比率に関連するアーク密度により、ArcWorld IV-6300SL のパーセンテージが大きくなり、標準構成で最も柔軟で生産性の高いワークセルになりました。
リピーターのお客様は、ロボット 3 台とポジショナー スパン 3 m の AWIV-6300 セルの指定から、ロボット 4 台 (AWIV-6400) とポジショナー スパン 4 m のセルに変更されました。これにより、顧客の部品面積対セル面積 (フロアスペース効率) は 34% からわずか 36% にわずかに改善されますが、アーク密度比 (または生産効率) は 101% から 143% に大幅に増加します。さらに、PLC、HMI、ツール、安全装置、ユーティリティ ドロップなどのセル統合コストが増加しないため、ロボットを追加することは費用対効果の高いソリューションです。
結論:
コンパクトなロボットワークセルはフットプリントを削減しますが、必ずしもフロアスペースを最も効率的に使用できるとは限りません。ジョブショップは、床面積の最も柔軟な使用法を決定するために、ワークセルのフットプリントに関連して部品サイズの容量を評価する必要がある場合があります。さらに、床面積の生産性を向上させるために、自動車会社は、ロボットを追加するために作業領域をわずかに拡大することを検討する場合があります。統合コストを含む、いくつかの異なるワークセル構成のコストを評価することは、メーカーが床面積の価値を最大化していることを確認するのに役立ちます。
産業用ロボット
- リアクティブメンテナンスをメンテナンス戦略の一部にする必要がありますか?
- EngraverFillerでパーツにラベルを付ける
- IoTとデータの理解
- ロボット溶接:メーカーがROIを実現する方法、パート4
- ロボット溶接:メーカーがROIを実現する方法、パート3
- ロボット溶接:メーカーがROIを実現する方法、パート2
- ロボット溶接:メーカーがROIを実現する方法、パート1
- ロボットMIGとTIG溶接:アプリケーションに適したロボット溶接の選択
- アプリケーションに適したロボット溶接プロセスと機器のタイプの選択
- あなたのビジネスを成長させるためのeコマースの力を最大化する
- カスタム RW950 溶接セルによる溶接アプリケーションの合理化