


バッテリー駆動のステッピングモーターでIoTをモーター化
この記事では、セキュリティカメラやリモートセンサーの配置や通気孔、バルブ、窓の作動など、IoT指向のタスクでステッピングモーターがどのように機能するかについて説明します。カバー。
センサー対応のスマートオブジェクトは、IoTの「目と耳」としてすでに重要な役割を果たしています。しかし、最近まで、IoTアプリケーションに実用的で手頃な価格の「腕と手」を提供するための実用的なソリューションはほとんどありませんでした。これにより、インターネット全体にアクセスして、物理的に見たり感じたりするものに反応することができます。ただし、これは変化しています。小型のバッテリーパックを使用して、モーター、ステッピングモーター、ソレノイド、およびサイバー世界の仮想的な意図を現実の行動に変換するその他のタイプのアクチュエーターに電力を供給することができる、費用対効果の高いIoT対応の電子ドライバーの出現です。 。
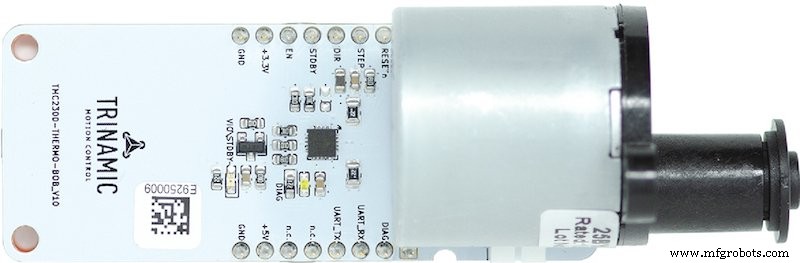
図1a。 ステッピングモーターは、このリモートでアクティブ化されるラジエーターコントローラーなど、ますます多くのIoTアプリケーションを見つけています。
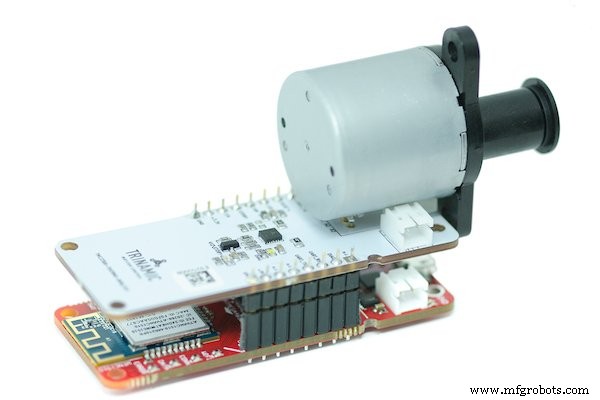
図1b。 Microchip AVRIoT開発ボードで示されているラジエーターコントローラー。
この記事では、ステッピングモーターに焦点を当てます。これは、セグメント化されたローターとアーマチュア構造により、ステッピングモーターが小さく、正確で、個別のステップで回転し、電源が入っていないときに位置を維持できるためです。これにより、セキュリティカメラやリモートセンサーの配置や、通気孔、バルブ、窓のカバーの作動など、IoT指向のタスクでうまく機能します。
限られた電源での作業
一部の電動IoTデバイスはライン電源ですが、遠隔地で動作するために必要なアプリケーションの数は増え続けており、多くの場合、単一のリチウムイオンセルやAAまたはAAAバッテリーなどの比較的小型の低電圧エネルギー源を使用します。家庭やオフィスにある多くのIoTアプリケーションの場合、これらのアプリケーションは環境に溶け込むはずです。つまり、電源ケーブルを使用することはできません。
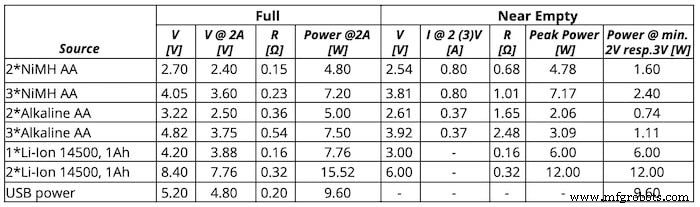
理論的には、これらのアプリケーションの多くはモーターの使用頻度が低いため、バッテリー電源が機能します。そのため、バッテリーの限られた容量への影響は比較的小さくなります。しかし、バッテリーは、ステッピングモーターがコイルに通電するために必要な、より高い駆動電圧と比較的大きな電流パルスを提供できない場合があります。表1に示すように、最も一般的に入手可能なバッテリーにはかなりの量の内部抵抗があり、出力電流が増加すると出力電圧が低下します。
表1.小型バッテリーの特性
幸いなことに、これらの制限を克服するためのいくつかの簡単な戦略が存在します。これには、電源バッファリング、ステップアップコンバータ、カスタムワインドステッパーが含まれます。これらの各戦略がどのように機能するかを見てみましょう。
サプライバッファリング
「電源バッファリング」と呼ばれる簡単な手法を使用して、短い大電流パルスを供給することができるスーパーキャパシタを追加することにより、小さなバッテリの限られた出力を補うことができます。
スーパーキャパシタのサイズは、次の式を使用して計算できます。
C =dU * I / t
場所:
dU =バッテリーの最大許容内部電圧降下
私 =バッテリーの出力を補うために必要な電流、および
t =希望の動作時間
現在、スーパーキャパシタはわずか2.7Vの最大動作電圧に耐え、供給電圧がこの値を超える可能性がある場合は保護回路が必要です。より高い電圧が必要な場合は、2つ以上のスーパーキャパシタを直列に配置できますが、回路には、電圧のバランスをとるためのツェナーダイオードまたはその他のデバイスが含まれている必要があります(図2)。
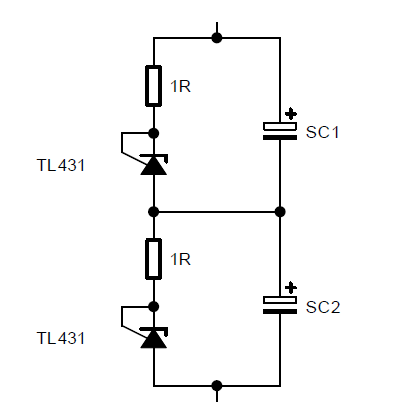
図2。 ツェナー過電圧保護(2.5V)を備えたスーパーキャパシタ平衡回路。
これらのタイプのアプリケーションに適したスーパーキャパシタは、現在、Maxwell、Skeleton、Vishayなどの多くのコンポーネントメーカーから広く入手できます。
ステップアップコンバーター
多くの一般的なモータードライバーを含む一部のICは、特に耐用年数の終わりに近づいている場合、小さなバッテリーパックから得られる低電圧での動作が困難です。ステップアップコンバータは低コストのICであり、バッテリの電圧を最大3〜4倍に高め、バッテリの寿命が尽きるまでシステムの供給電圧を均一なレベルに維持するために使用できます。これらのコンバータは、高負荷では非常に効率的(90%〜95%)ですが、軽負荷では効率がいくらか低下します。これらは、スタンドアロンソリューションとして、またはスーパーキャパシタと組み合わせて使用できます。
ステップアップコンバータを製造しているICメーカーには、Analog Devices、Maxim Integrated、TexasInstrumentsなどがあります。このタイプのアプリケーションで最も頻繁に使用されるコンバータの1つは、マキシムのMAX8969です。
カスタム巻きステッパー
ほとんどのステッパーは、小さなものでも、5Vから12Vの範囲の電圧で動作するように設計されていますが、ほとんどの小さなバッテリースタックは1.5Vから5Vを生成します。これらのより低い電圧で動作するために、ステッパーはより太く、より低い抵抗のワイヤーのより少ない巻き数で巻線を必要とします。幸いなことに、ほとんどのメーカーは、リーズナブルな料金で、または無料でカスタムオーダーに対応するように設定されています。
カスタムワインドモーターを注文するには、停止時の公称トルクを与えるRMSモーター電流として定義されるコイル電流(ICOIL)を指定する必要があります。これらのタイプのアプリケーションでは、抵抗損失を最小限に抑え、ある程度の余裕を持たせるために、最大定格電流の50%〜70%で必要なトルクを提供するモーターを使用することをお勧めします。
巻線を指定する最初のステップは、メーカーの元のモーター仕様を使用して、アプリケーションに必要なトルクを生成するために必要な電流を計算することです。この値を使用して、次の式を使用してモータータイプの電圧要件を計算します。

停止状態のこの計算は、逆起電力がほとんどないスローモーション操作でもかなり正確です。高速では、モーター固有の逆起電力定数CBEMFも、以下を使用して考慮する必要があります。

この式は、保持トルクと割り当てられたコイル電流の商を使用します。どちらの状況でも、ステッパーのRCOILを減らすと、UBATを下げることができることに注意してください。
選択したステッパーの電圧要件が電源から利用可能な電圧を超えていることがわかった場合は、より高い電流を使用してより低い電圧で動作するカスタム巻線バージョンについて、モーターの製造元に問い合わせてください。
すべてをまとめる
この記事で紹介したテクニックについて詳しく知りたい場合は、Trinamicアプリケーションノート#57、TMC2300でサーモスタットを作成する方法をダウンロードできます。ここでは、実用的な例を使用して、これらのトピックの多くをより深く探求しています。
これらの手法の背後にある理論は、Embedded World2020で発表したモバイルおよびワイヤレスIoTデバイスの低電圧モーター制御システム設計の論文でさらに詳しく説明されています。
追加のリソース
- Inventables Workshop:ステッピングモーターの基本
- プロジェクトに適したモーターの選択–DCvsステッピングvsサーボモーター
- ステッパーの運転– Adafruit Industries
- TMC2300-THERMO-BOB評価キット(PDF)
- データシート:TrinamicTMC2300低電圧ステッピングドライバー
業界記事は、業界パートナーが編集コンテンツに適さない方法でAll About Circuitsの読者と有用なニュース、メッセージ、テクノロジーを共有できるようにするコンテンツの形式です。すべての業界記事は、読者に有用なニュース、技術的専門知識、またはストーリーを提供することを目的とした厳格な編集ガイドラインの対象となります。業界記事で表明されている見解や意見はパートナーのものであり、必ずしもAll AboutCircuitsやそのライターのものではありません。
モノのインターネットテクノロジー