


A4988 ピン配置:機能、操作、ピン配置などの究極のガイド!
ステッピング モーターは、電気エネルギーを機械エネルギーに変換して動作するモーター タイプです。 A4988 のピン配置は、このステッピング モーターの例です。非常に手頃な価格で耐久性に優れているため、トレンディなマイクロ ステッピング モーターです。
この記事では、a4988 ステッピング モーター、その機能、ピン配列の説明、および接続の段階的なプロセスについて説明します。
A4988 ステッピング モーター ドライバー モジュールとは?
a4988 は、操作を容易にする変換機能を内蔵したマイクロステッピング ドライバーです。モーターの設計は、バイポーラ ステッピング モーターをステップ モードで動作させることです。 STEP 入力に 1 つのインパルスを入力すると、モーターが 1 つのマイクロステップで駆動されます。また、モータ構造は定電流レギュレータで構成されています。この電流レギュレーターは、低速または混合減衰モードで機能する可能性があります。
さらに、a4988 では、フェーズ シーケンス、プログラムへの複雑なインターフェイス、高頻度の制御ラインがありません。
さらに、a4988 モーターが提供するモーター インターフェイス タイプは、マイクロプロセッサが利用できない、または過負荷のプロジェクトに最適です。

(分解されたステッピングモーター)
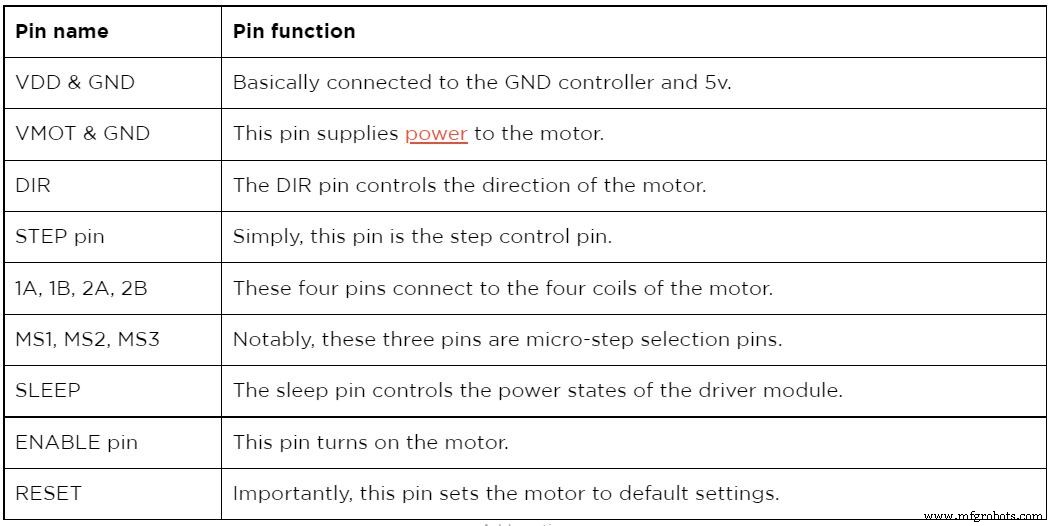
A4988 ピン配置構成

(ローターセット側を分解したモーター)
A4988 の機能と利点
- まず、a4988 電子機器には 5 つの選択可能なモードがあります。たとえば、フル、1/2 ステップ、1/4 ステップ、1/8、1/16 ステップです。
- 第 2 に、このデバイスは、サーマル シャットダウン回路を備えたモーターを使用して、地絡および負荷短絡保護機能を備えています。
- 第 3 に、デバイスには逆電圧保護がありませんが、クロスオーバー電流保護と比較的低い RDS(ON) 出力があります。
- さらに、自動電流減衰モード検出と 15.5mm x 20.5mm を備えています。
- さらに、ステッピング モーターの最大動作電圧は 35 V、最小動作電圧は 8 V です。
- さらに、A4988 ハイブリッド ステッピング モーター ドライバーには、低消費電力のための同時整流機能があります。
- 最後に、1 相あたりの最大電流は内部 UVLO で 2A です。

(電動ステッピングモーター)
A4988 代替製品
他の電気機器と同様に、a4988 モーターには代替オプションがあります。特に、その代替品には、DRV8825、L6207、L6474、L6208、TMC2209、および TMC2208 が含まれます。
A4988 ドライバー モジュールの使用方法
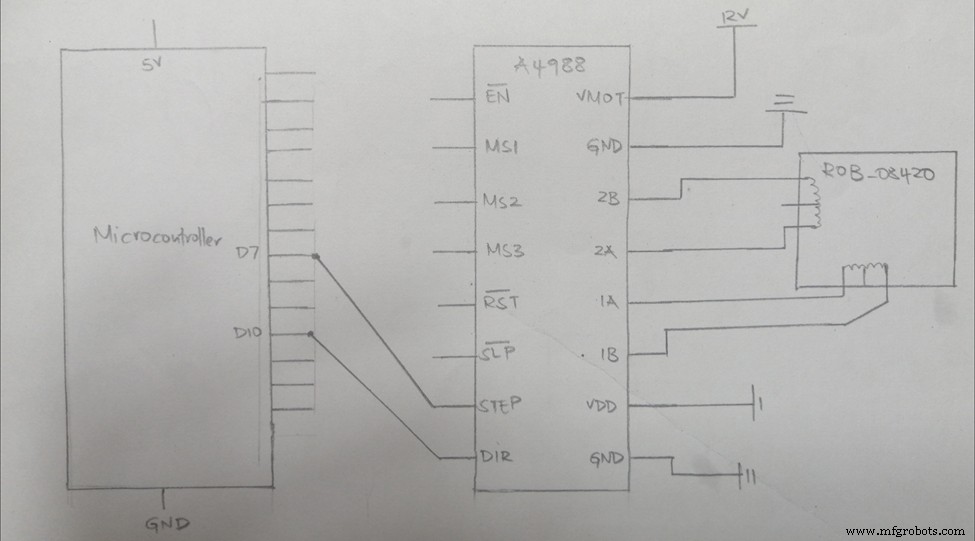
(マイクロコントローラを備えた a4988 電子回路の図。)
プロジェクトの例は、A4988 ドライバー モジュールと Arduino の配線です。 A4988 ドライバーと Arduino のモーター接続は非常に簡単です。
接続手順。
最初の接続では、VDD ピンと GND ピンを Arduino の 5V ピンと GND ピンに接続します。
次に、方向ピンと STEP ピンを Arduino の #2 と #3 出力デジタル ピンに接続します。また、1B、1A、2B、および 2A ピンをステッピング モーターに接続していることを確認してください。レイアウトが多くのバイポーラ モーターに見られる 4 ピン コネクタと一致するため、a4988 ステッパーを使用すると非常に便利です。
ここで、RST ピンを SLP ピンに接続してドライバーを有効にします。モーターをフルステップ モードで操作するには、常にマイクロステップ選択ピンを切断したままにしてください。
最後に、VMOT ピンと GND ピンをモーター電源に接続します。ドライバに低 ESR セラミック コンデンサが存在する場合でも、必ずデカップリング電解コンデンサを使用してください。デカップリング コンデンサは、ドライバを電圧スパイクから保護します。
重要なヒント:
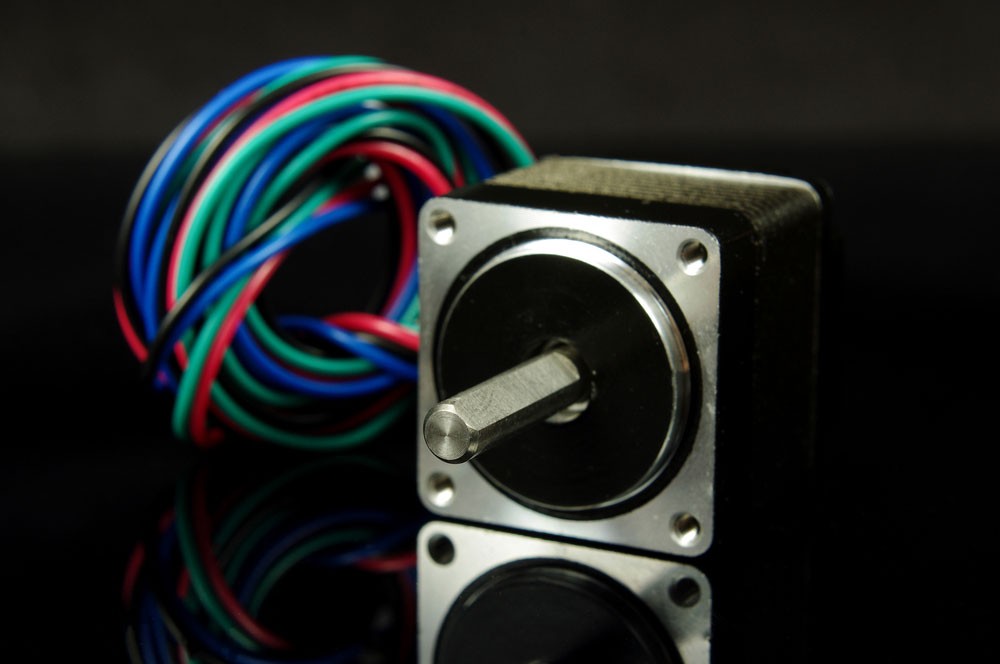
(ワイヤ付きの独立したステッピング モーター。)
A4988 ピン配置:コード
以下は、単純なステッピング モーター制御のサンプル コードです。
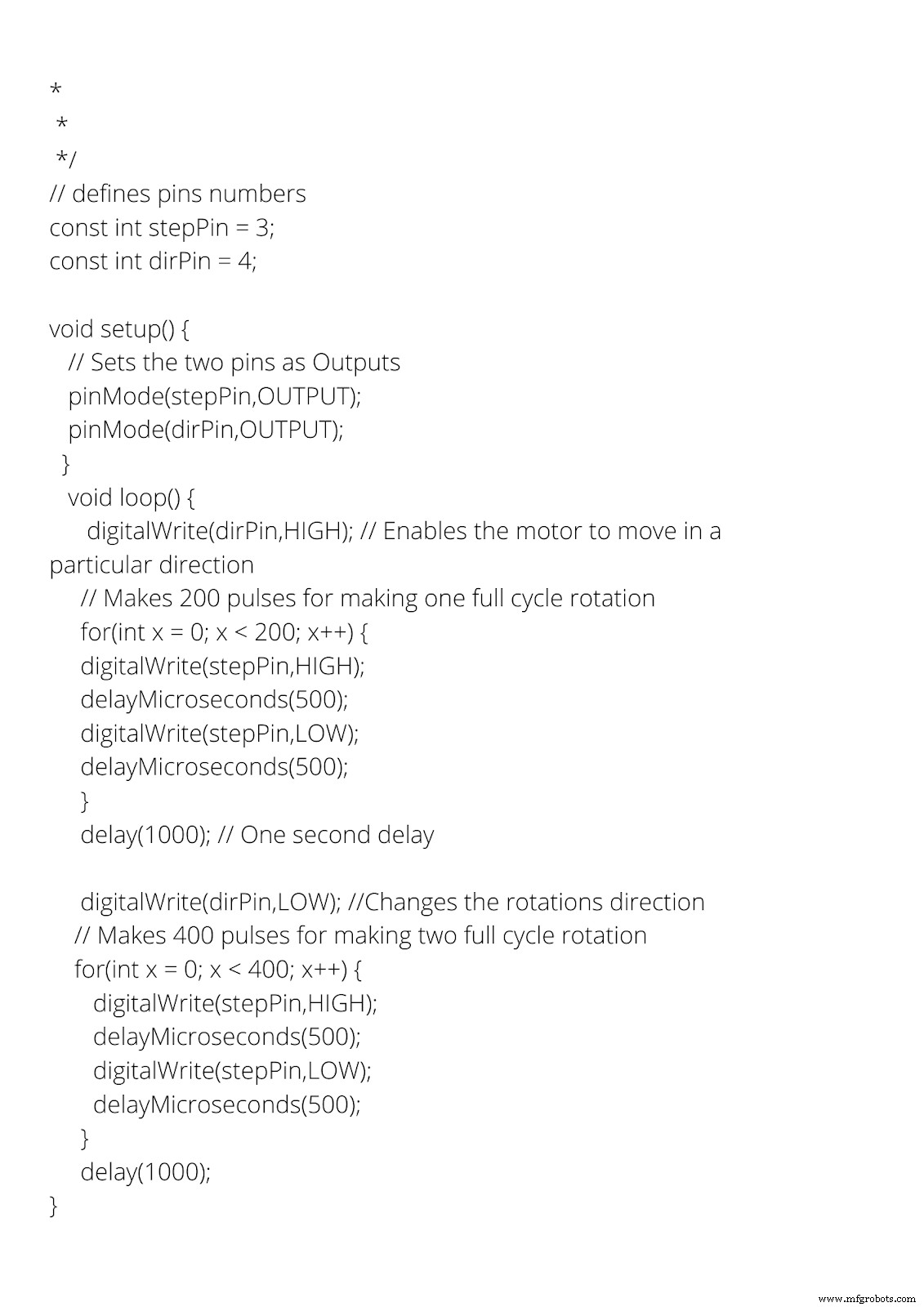
(ステッピング モーター制御コードの画像)
上記のコードをコピーして IDE に貼り付けます。

(分解されたステッピング モーター)。
正常に接続するには、DIR ピンをハイまたはローに設定します。特に、モーターは高に設定すると時計回りに回転します。ただし、ローの場合、モーターは反時計回りにシフトします。
STEP ピンは、ステッピング モーターの速度を決定する周波数のパルスを受け取ります。この場合のパルスは、出力を HIGH に引き上げるプロセスです。次に、しばらく待ってから同じ出力を LOW にし、再び待機します。 2 つのパルス間の待機期間が変化すると、パルス周波数が変化し、モーター速度が変化します。

(電気モーター)
A4988 ピン配置:電流制限
モーターを使用する前に、モーターコイルに流れる電流を調整して制限する必要があります。 2Aはコイルに流れる最大電流です。したがって、電流制限を設定するには、a4988 ドライバの電流制限ポテンショメータを使用します。また、電流制限をモーターの定格電流以下に設定してください。
- まず、データシートで現在の評価を確認して調整してください。
- 次に、ドライバーをフルステップ モードのままにします。
- 第 3 に、STEP 入力をクロークしないでください。重要なことに、これはモーターを固定位置に保持するのに役立ちます。
- 次に、トリマー ポテンショメータを使用して、調整時に基準電圧 (Vref) を測定します。
- 最後に、電流制限 =Vref x 2.5 を使用して基準電圧を調整します。
(写真はさまざまなタイプのモーターを示しています。)
A4988 アプリケーション
- 子供のおもちゃのアプリケーション
- ロボットは、a4988 ハイブリッド ステッピング モーターを使用して動きを制御します。

(緑色のワイヤを使用したステッピング モーター インターフェース タイプ。)
まとめ
この記事では、AD9850 DDS 信号発生器モジュールの機能、その接続、およびそれらがどのように機能するかについての情報を提供します。モジュール関連のプロジェクトについて詳しく知りたい場合は、お問い合わせください!私たちのチームは、いつでもあなたからの質問に喜んでお答えします!
産業技術
- USB-Cのピン配置と機能のガイド
- メーカー向けソーシャルメディア:究極のガイド[eBook]
- ポストコビッドの労働と運用を最適化するための小売業者ガイド
- 組み立てのための設計と製品製造におけるその使用
- 倉庫の生産性:15人の専門家が、より効率的で生産的な倉庫運用のためのヒントを明らかにします
- 施設管理ガイド:運用および管理戦略、プロジェクト管理、リーダーシップなど
- サーボ モーターの故障とその原因を知るための完全なガイド
- Ultiboard – 初心者向けの究極のガイド
- ヒューズの種類:ヒューズの究極のガイド
- 2N3771 トランジスタ:ピン配置、機能、アプリケーション、および代替品
- AT89c51 マイクロコントローラ:プログラミング、ピン配置、機能、代替手段