


L298 – モータードライバーモジュールの総合解説
Hブリッジは、負荷に印加される電圧の極性を切り替えることによって機能する電子回路です。それらのアプリケーションはロボット工学にあり、DC モーターの前後の動きを可能にします。 H ブリッジを構築するにはいくつかの方法があります。そのうちの 1 つは、L298 集積回路のようなリレーを使用することです。
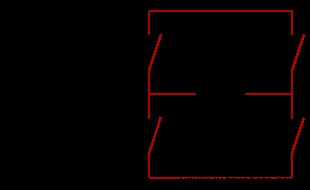
赤でハイライトされた H ブリッジ
L298 とは?

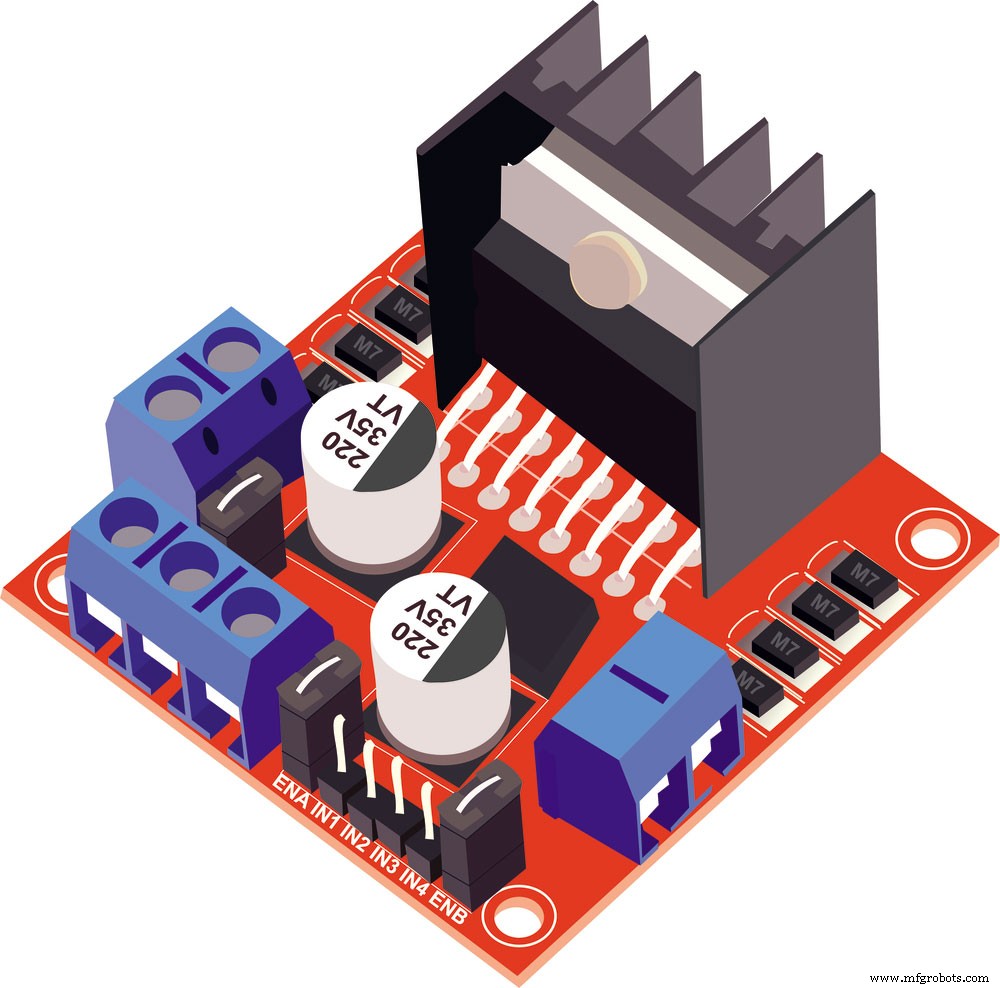
L298 デュアル H ブリッジ モーター ドライバー
別の定義では、L298 は PowerSO20 および 15 リード マルチワット パッケージの統合モノリシック回路です。
入力信号に関係なく、出力に接続されたデバイスを個別に無効または有効にする 2 つのイネーブル入力があります。さらに、DC モーターの回転方向を規制します。
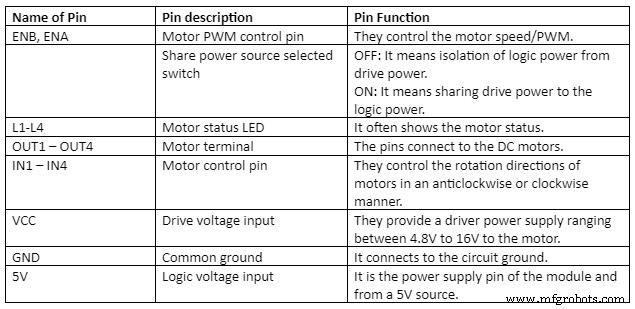
L298 ピン構成
L298 のピン配置をまとめた表を使用します。
L298の特徴
L298 の機能または特性には、次のものが含まれます。
- まず、最大 46V の動作電源電圧があります。
- また、その合計 DC は約 4A です。ここでは、連続動作電流は最大 2A になりますが、瞬間的なピーク電流は 3A です。
- 次に、フリーホイール ダイオードと大容量フィルタ コンデンサによる過熱保護を備えています。コンポーネントは、誘導性負荷の逆電流がデバイスに到達するのを制限します。
- 保管温度範囲は -40°C から 150°C で、動作温度範囲は -23°C から 130°C です。
- 飽和電圧が低く、定格電力は 25W です。
- そのノイズ耐性は、約 1.5V の論理「0」入力電圧によって実現されます。
- 簡単なロジック インターフェースに役立つソケット ピン コネクタも備えています。
- 最後に、2 つの DC モーター、4 相ステッピング モーター、および 2 相ステッピング モーターを操作できます。
L298n モーター ドライバー
一般に、メーカーはさまざまな L298n モジュールを使用してモーター ドライバーを作成しています。例は次のとおりです。
(l298n ドライバ ボード モジュール)
- L298 デュアル H ブリッジ モーター ドライバー
前述のように、これは高電流、高電圧のデュアル フルブリッジ ドライバーで、ダブル H ドライバー モジュールによく使用されます。 H ブリッジは、DC モーターの回転方向を制御します。
- モーター ドライバー L298 モジュール
モーター ドライバー L298 モジュールは、2 つの DC モーターの方向と速度を約 40V 3A に調整します。
別の電源がモーターに電力を供給し、ガジェットのメインボードが動作中にモジュールに電力を供給して制御します。
- Grove – I2C DC モーター ドライバー
その機能は、DC (2 つのブラシ付き) またはステッピング モーター (1 つの 4 線式 2 相) を直接制御することです。その中央には、チャネルあたり約 2A の電流に耐えることができるデュアルチャネル H ブリッジ ドライバ チップがあります。
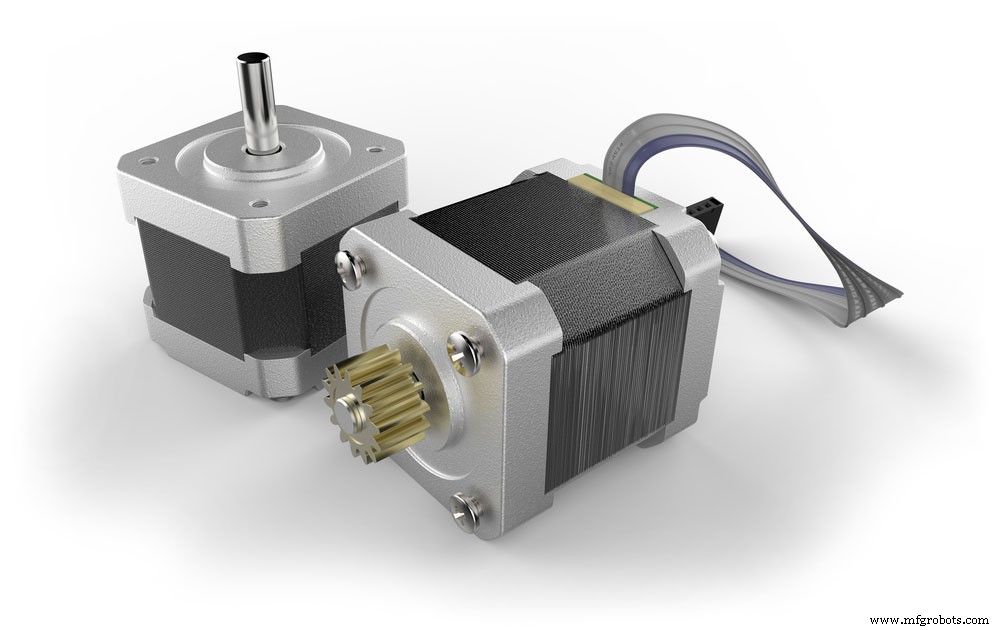
(ステッピング電動機)
Atmel ATmega8L はチップを制御し、Arduino などのプラットフォームで I2C インターフェイスを管理できます。また、ステッパーと DC モーターを異なる方向と速度で同時に駆動することもできます。
L-298 モーター ドライバーはどのように機能しますか?
以下の完全な回路図は、L298n モーター ドライバーの内部構造のワークフローを説明しています。
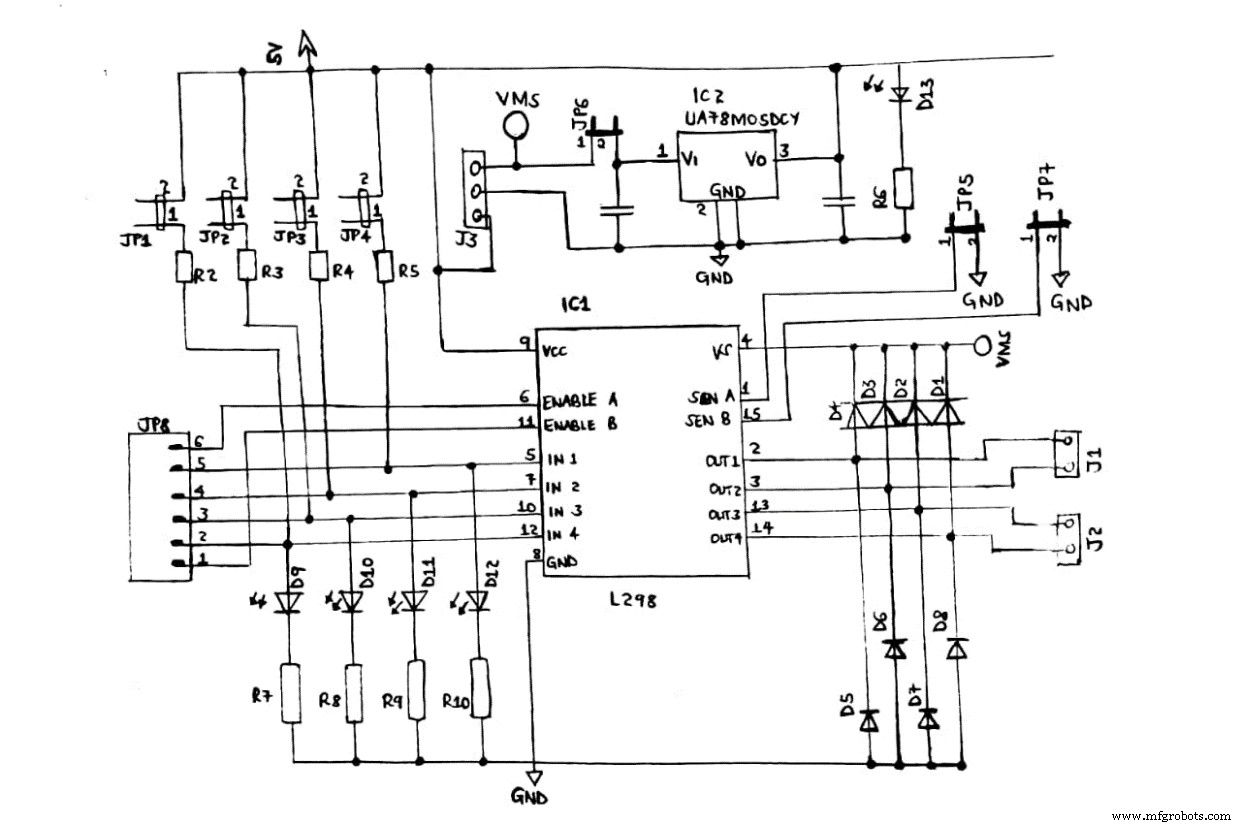
L298n モーター ドライバーの仕組みの概略図
次の表は、モーター 1 と 2 の状態とその制御モードを示しています。
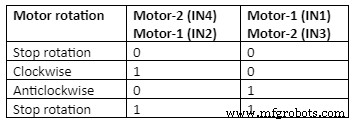
表の説明
- 何よりもまず、制御ピン IN2 と IN1 (モーター 1)、およびピン IN4 と in3 (モーター 2) が回転方向を制御します。
- 有効なシグナルが 1 の場合
- モーター A とモーター B の制御が類似するようになります。
- IN2 は 0 で、IN1 はモーター A の反時計回りの回転です。
- IN2 が 1、IN1 が 0 =モーター A の時計回りの回転。
- IN2 と IN1 が 11 または 00 の場合 =モーター ブレーキ状態。
- さらに、モーター 2 の ENB やモーター 1 の ENA などの PWM 制御ピンを使用して、モーター速度を制御できます。この方法を使用する場合は、有効端子の出力 PWM パルスと、IN2 および IN1 の方向を確認してください。
Arduino および DC モーターと接続する L-298 モーター コントローラー
一般に、l298 デュアル H ブリッジは、電流の方向を切り替えることができるため、モーターを両方向に回転させるのに役立ちます。さらに、PWN 入力を備えた Arduino を組み込んで、モーターを任意の方向または速度で回転させることができます。
必要なコンポーネント
- ベース シールド V2、
- 2×130 DC モーター
- Grove – i2C モーター ドライバー、
- Seeeduino V4.2/Arduino UNO
手順
- ダイヤル スイッチでアドレスを設定することから始めます。
- 次に、Grove-I2C モーター ドライバ V1.3 を Grove-base シールド ポートに接続します。
- 3 番目に、Grove-base Shield V2 を Seeeduino に挿入します。
- 次に、USB ケーブルを使用して Seeeduino を PC に接続します。
- GitHub サイトを使用して、Grove I2C モーター ドライバー V1.3 ライブラリを入手します。

(GitHub プラットフォーム)
- その後、Arduino ライブラリをインストールします。
- 最後に、コピーしたコードを Arduino IDE にアップロードします。コードは次のようになります。
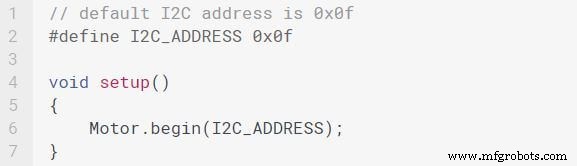
DC モーターの制御
- 速度機能キーは、目的のモーター速度を設定します。例は次のとおりです。
_speed;設定可能な速度を表します。 -100 から 100 (最も遅いものから最も速いもの) の範囲で指定できます。また、<0 モーター速度は反時計回りの方向を意味し、>0 は時計回りの方向を意味します。
Motor_id; これは、モーターの種類、つまりモーター 1 または 2 を表します。
- さらに、実行中の DC モーター (MOTOR1/2 など) を停止する停止機能があります。
L298 アプリケーション
L298 アプリケーションには次のものがあります。
- 趣味のプロジェクト
- エンジニアリング システム、
- 自動ドア制御システム
- ロボットとロボット アーム
- CNC マシン、

(CNC マシンを使用したワークショップ)
- 測定器、
- リレー ドライバー
- 重量挙げ選手、
- 産業機械、
- 自動販売機。
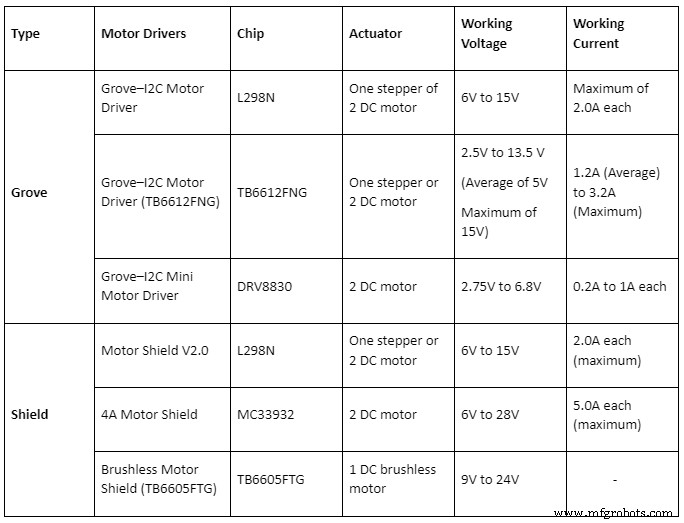
L298 と他のモーターの比較
確かに、市場にはステッピング モーターやサーボ モーターなどのモーター ドライバーがいくつかあります。
結論
l298n モーター ドライバーに関する記事を締めくくるにあたり、この技術についての知識を深めていただければ幸いです。それでもご不明な点がある場合、またはさらに説明が必要な場合は、お気軽にお問い合わせください。お役に立てれば幸いです。
産業技術