


ソロサーボスイープ
コンポーネントと消耗品
>  |
| × | 1 | |||

| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
このプロジェクトについて
イントロ
Soloには優れた開発環境がありますが、I / Oが不足しています。現在、アクセサリポートは、CAN、Mavlink SerialからPixhawk、USBからSololink(imx6)に分かれています。 arduinoとfirmataを使用することで、カスタムセンサーを追加したり、サーボを制御したり、LEDを点滅させたり、その他のarduino機能を追加したりできます。
このチュートリアルでは、Soloでarduinoを使用してサーボを制御する手順を説明します。
ソフトウェアの前提条件:
- ソロアップデート1.2.0以降
- Arduino IDE
- Filezilla
- パテまたはその他のSSHクライアント
ステップ1:FirmataホストをArduinoUnoにアップロードする
<図>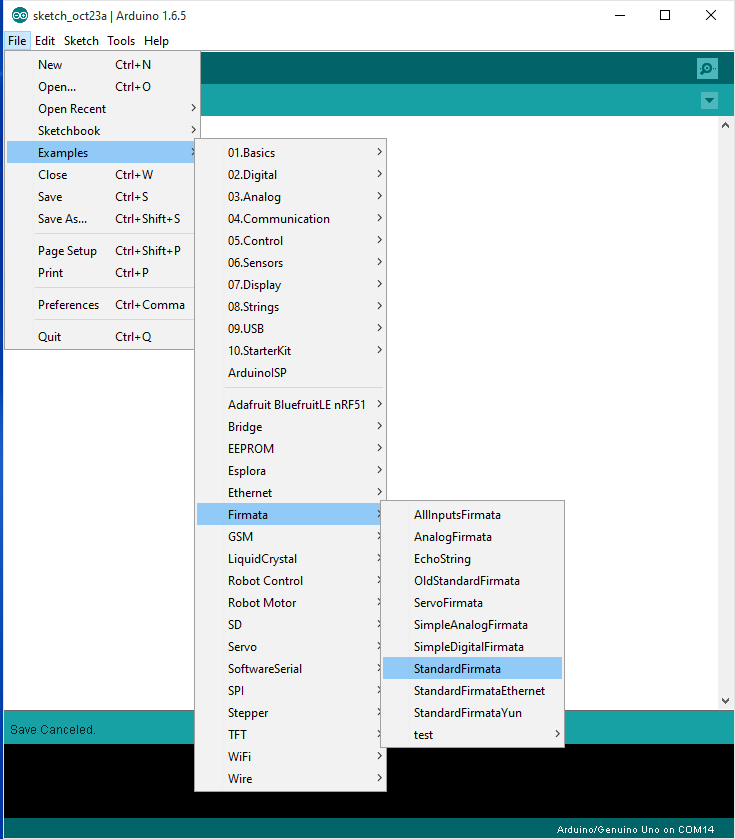 <図>
<図> 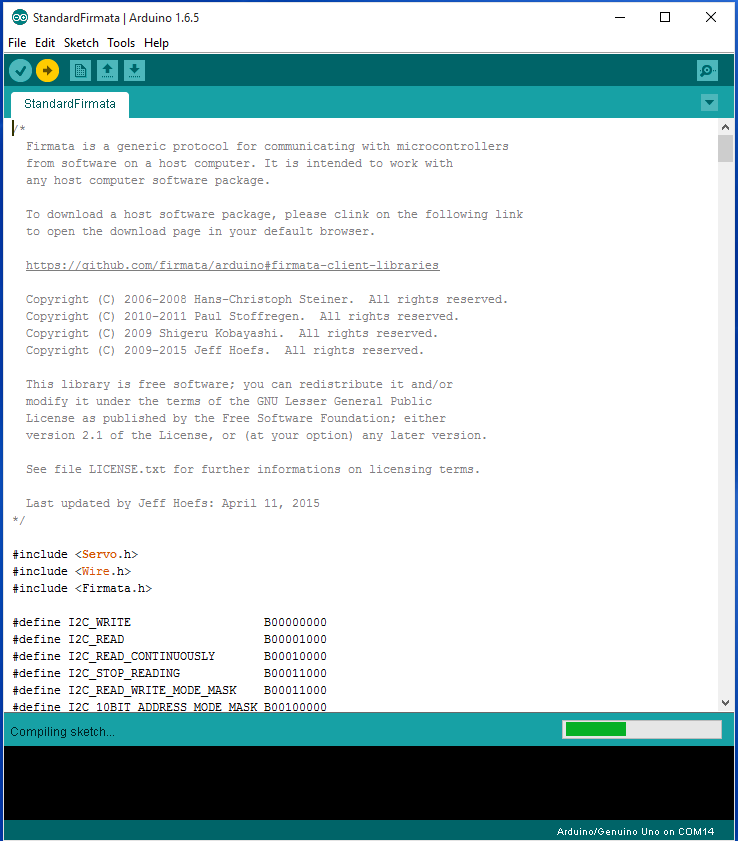
[例]タブからStandardFirmataを開きます。ボードとポートを選択します。アップロード!
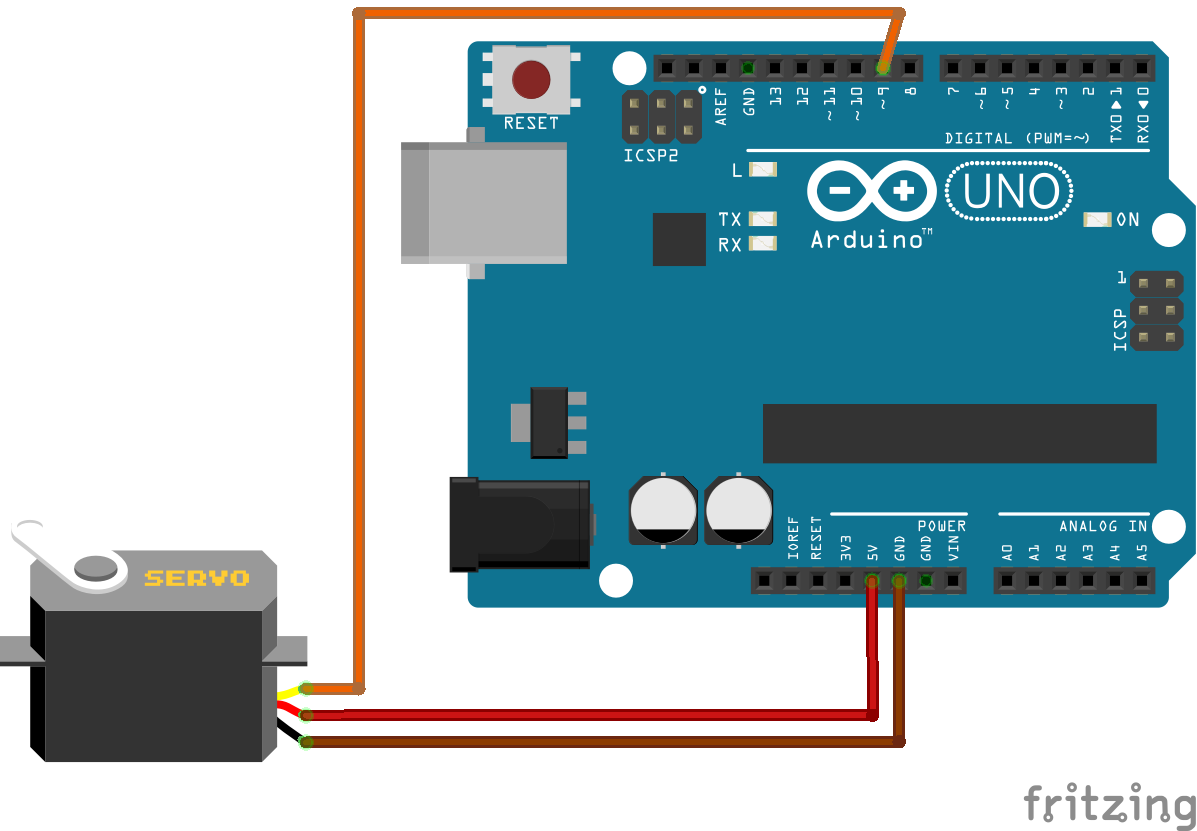
ステップ2:ハードウェアのセットアップ
パーツ
<図> <図>
<図>  <図>
<図>  <図>
<図> 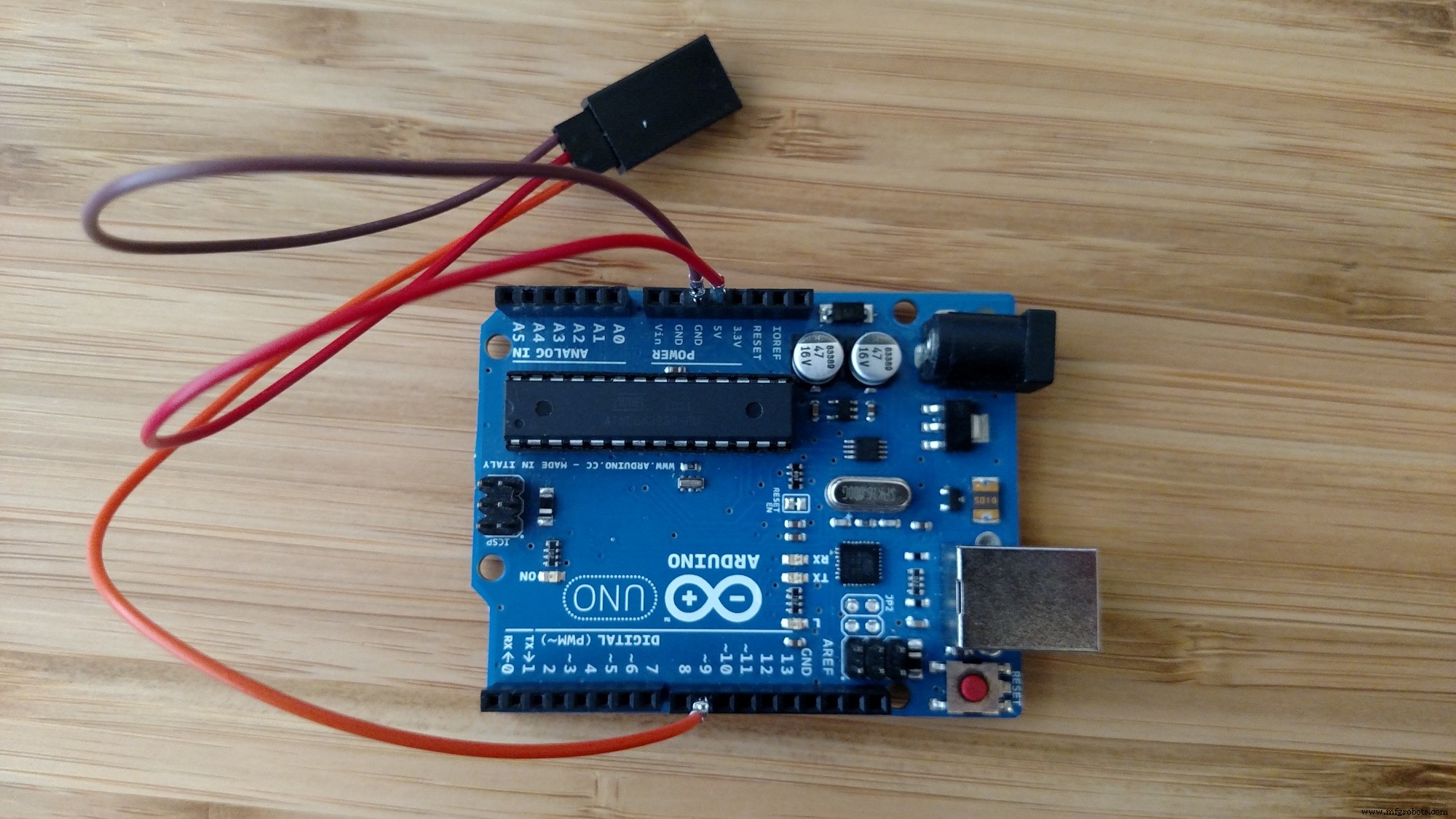
注:現時点では、ブレイクアウトボードは販売されていません。こちらをご覧ください
組み立て
<図> <図> 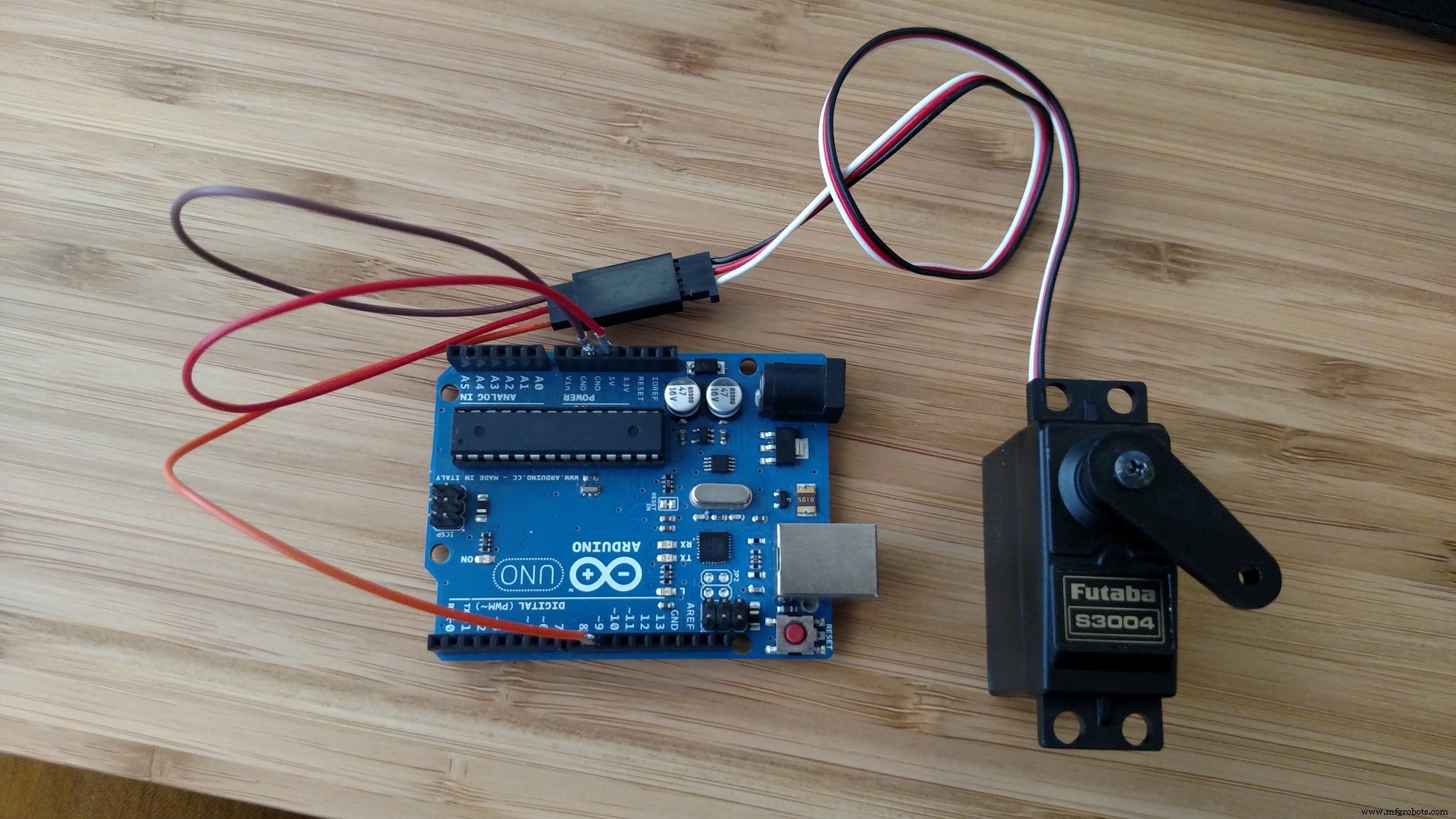 <図>
<図>  <図>
<図>  <図>
<図> 
電源オン
<図>
ステップ2:pyMataとコードをダウンロードする
pyMata
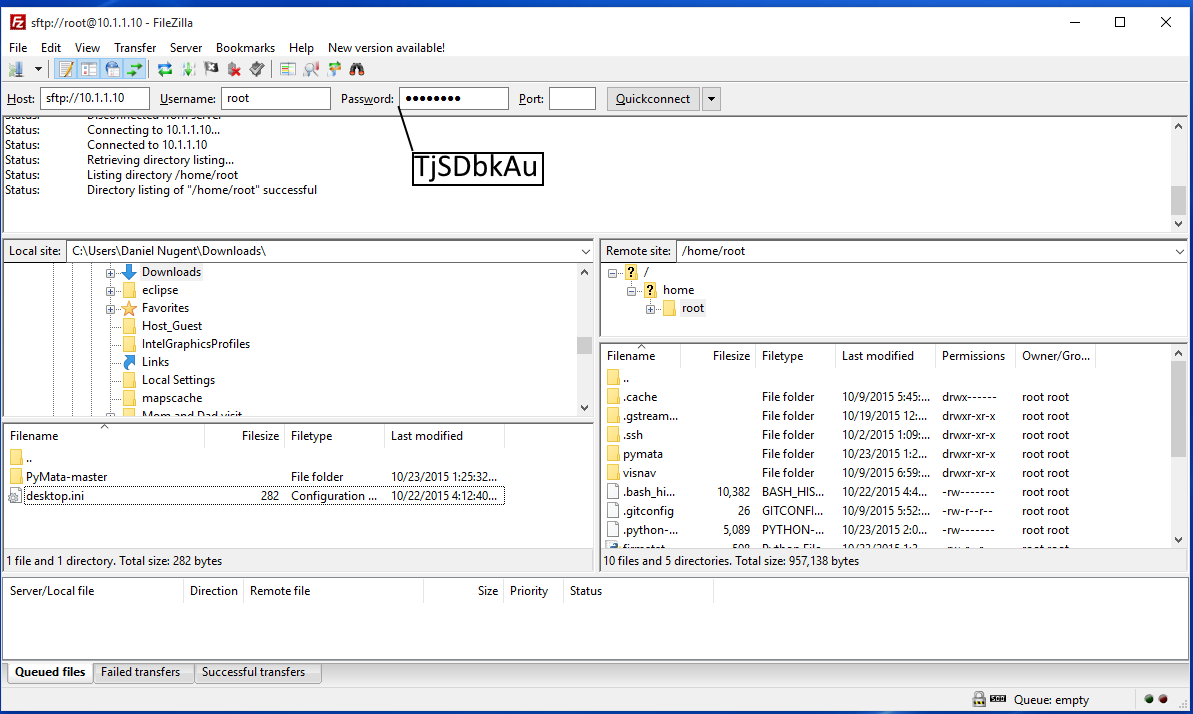
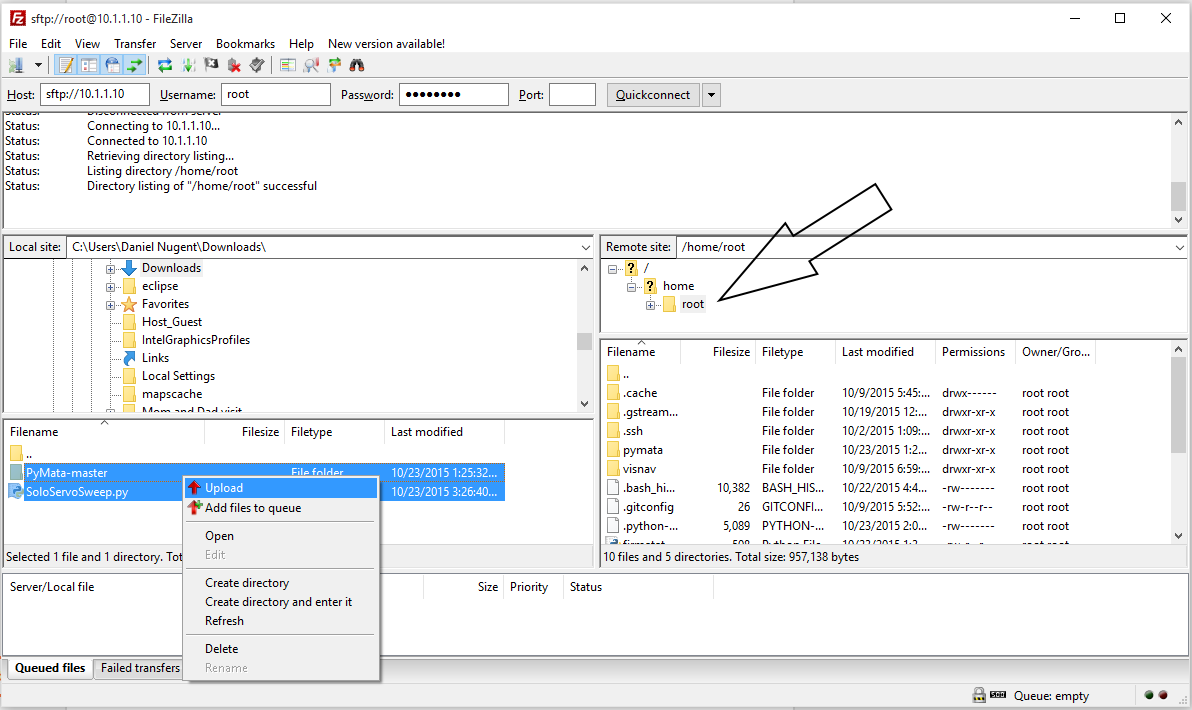
SoloServoSweep.pyステップ3:ファイルをSoloに転送する
- SoloのWifiネットワークに接続してください!
ステップ4:SoloにSSH接続する
OSのSSHクライアントを使用してSoloにSSH接続します。 Windowsの場合、Puttyを使用します。
<図>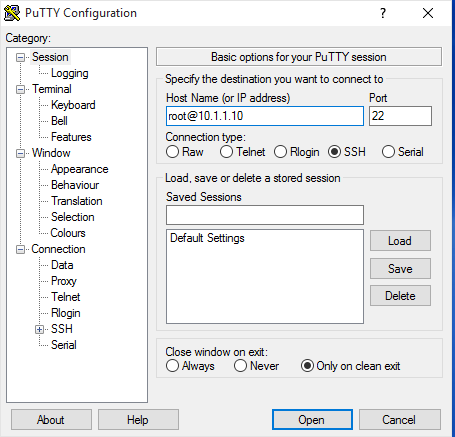 <図>
<図> 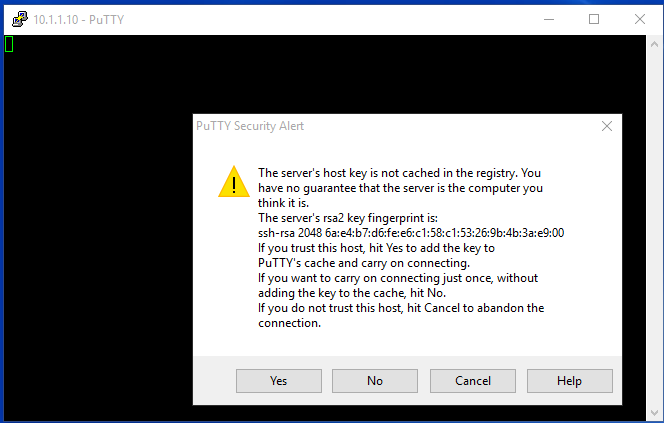 <図>
<図> 
引き続きSoloのWi-Fiに接続していることを確認してください!
詳細については、写真のキャプションをご覧ください
ステップ5:pyMataをインストールする
SSHセッションで次のコマンドを実行します:
これがあなたの結果になるはずです
<図>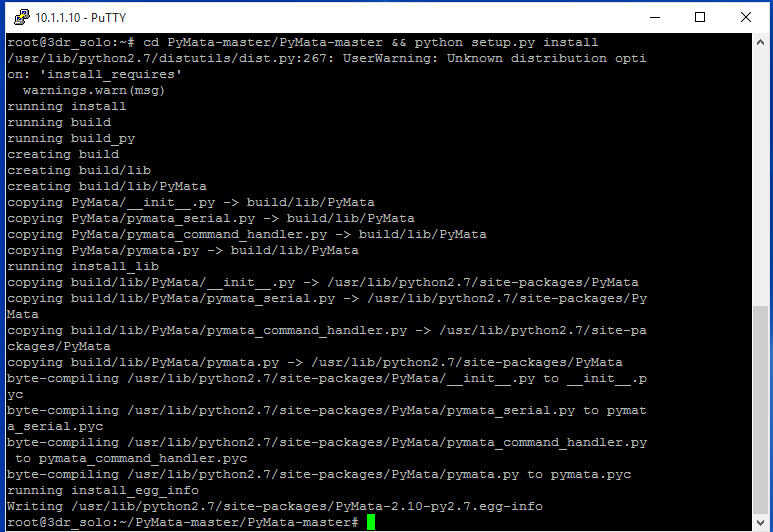
ステップ7:例を実行する
sshセッションがまだ開いている間に実行:
<図>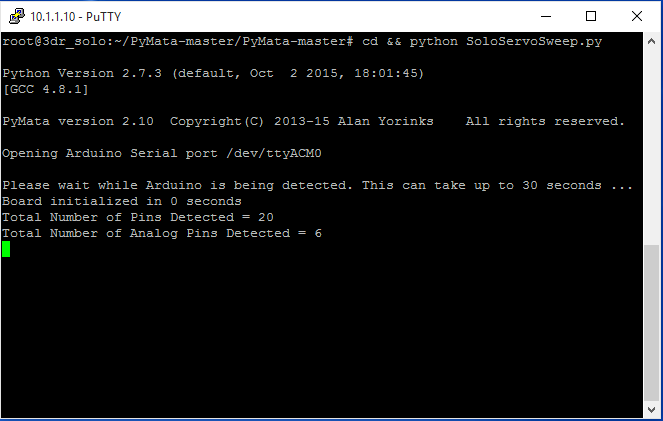
コード
- SoloServoSweep.py
SoloServoSweep.py Python
Soloからサーボを駆動するfrom PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9#このピンに接続されたサーボEND =170#最大サーボトラベル#PyMataインスタンスボードを作成=PyMata( "/ dev / ttyACM0")#configure pin asservoboard.servo_config(SERVO_MOTOR)try:while True:for i in range(0、END):#sweep up board.analog_write(SERVO_MOTOR、i)time.sleep(.015)for i in range(END、0、- 1):#board.analog_write(SERVO_MOTOR、i)time.sleep(.015)をスイープダウンします。ただし、KeyboardInterrupt:board.close()sys.exit()
カスタムパーツとエンクロージャー
ソロブレイクアウトボード
3DRSoloアクセサリポート用のブレイクアウトボードhttps://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1 回路図
製造プロセス