


DDTv3:3Dプリントされたナイロン-ケブラー戦闘ロボット
DDTv3:3Dプリントされたナイロン-ケブラー戦闘ロボット
今年の7月初めにボットブラスト2015のイベントレポートを作成する機会はありませんでしたが、作成したとしても、実際には多くのことを言うことはありません。 DDTもサイレントスプリングもあまりうまく機能せず、合計W-Lは2〜4でした。さらに、DDTのフレームが完成し、この機会に、「ビッグウェポンエンターテインメント」や「間接ドライブ」など、過去1年間に宣伝していたいくつかの設計信条を再検討する機会がありました。これらの概念は、娯楽の価値と長期的な信頼性には適していますが、必ずしも戦いに勝つための鍵とは限りません。少しテレビに出演して、私は背中にターゲットを持っていました。多くのビルダーは、バトルボットの創設者が説明した「作物のクリーム」ロボットビルダーの1人に対して自分自身を証明するチャンスを望んでいます。私はこれを少し気にしませんが、もしそうなら、私は誇大宣伝に応えたほうがいいです。そして、DDTから始めて、フリート内の各ロボットを進化させます。
新しいデザイン
最近、チャールズはMarkForged社からMarkOne3Dプリンターを購入しました。このプリンタは、印刷物の各層に連続した繊維(グラスファイバー、ケブラー、炭素繊維)を埋め込むことができるという点で独特です。垂直ビルド軸にファイバーを配置することはできませんが、これは引張強度の大幅な向上です。
さらに、それはそのベース材料としてナイロンを印刷します。これは、私たちのアプリケーションでABSよりも機械的に優れています。彼らの技術の能力と応用をさらに実証するために、私はDDTをナイロンケブラーユニボディとして印刷することを選択しました。
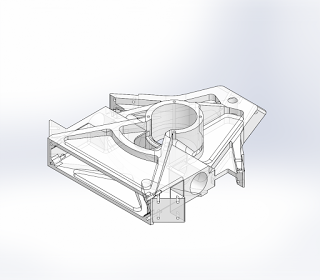
ユニボディフレームの設計は、部品、それらの接続、およびそれらの組み立て順序に関する多くの詳細を事前に知っておく必要があるため、少し難しいです。 CADは、このプロセスにおいて非常に貴重なツールになりました。各パーツは非常に詳細にモデル化され、後部コンポーネントベイの詳細な組み立て順序が作成されました。
このデザインは3D印刷には最適ではないことを十分に理解しており、興味があれば別の投稿で説明できるかもしれません。トラスの設計の理由は、長いまたは薄いフィーチャーを強化するためのアドオンでした。より良いデザインはロボットをよりブロック状にしたでしょうが、私の意見では美的に退屈だったでしょう。
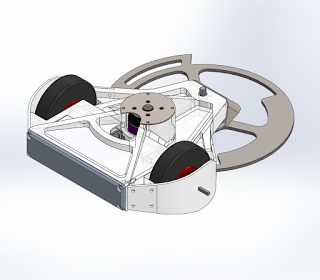
DDTは、その独特の形状とトレードマークである「巨大なお尻の刃」を維持しましたが、いくつかの変更が加えられました。まず、ブレードのサイズを(6.5インチではなく)6インチに縮小しました。この決定は、他の場所、特にブレードへのリブに割り当てられる重量を解放するために行われました。私はDDTv2用に2つのブレードを作成しましたが、どちらも1年ほど経つとひどく曲がって使用されました。新しいブレードの設計により、セクションが約1.5倍に強化され、古いブレードよりも軽量でした。

第二に、より多くの鎧が体に追加されました。この決定は、滑車と車輪へのヒット数の後に行われました。フレームパーツは全体的に厚くなり、サイドアーマーが含まれます。
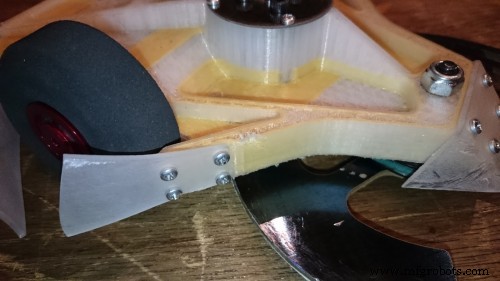
第三に、間接駆動は、柔らかなフォームホイールを備えた22:1のシルバースパークへの直接駆動を優先して廃止されました。小さな真ちゅう製のマイクロギアモーターは信頼性が低いことが判明し、私が使用していた比率は操作しやすいほど穏やかでした。オリジナルのDDTは約20:1のギアボックスを使用し、優れた機動性を備えていました。
最後に、刃の材質を変更しました。今回は、硬化の試みが不十分だったので、プレハード材料を使用したいと思いました。標準の6インチブレードは、60Cハード1075/74ばね鋼のウォータージェットでした。特定のタイプの対戦相手のために、別のブレードセットが作成されました。これらもさまざまな素材で作られ、さまざまな形状を持っていました。

製造
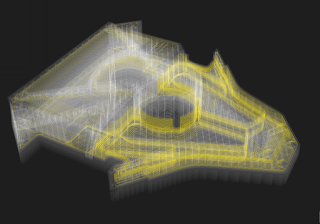
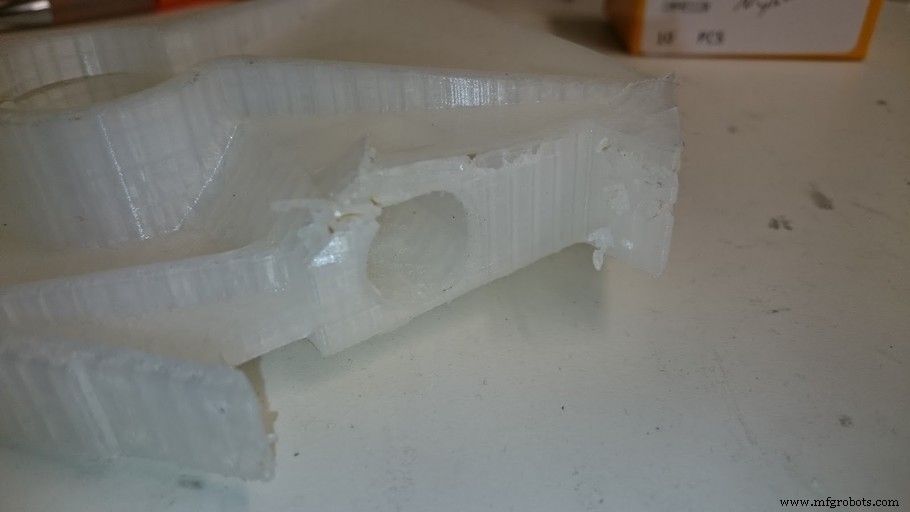
フレームの印刷には36時間近くかかりました。プリンタは現在、特にファイバーを追加すると、明らかに低速になります。フレームは確かにより多くのファイバーを使用できたはずですが、奥行きよりもファイバーの「高さ」を最適化することにしました。そのため、すべてのレイヤーにファイバーが含まれていましたが、一部のレイヤーのみにフルレイヤーが含まれていました。

フレームは、部品を適切に取り付けるために、ある程度のクリーニングが必要でした。アンダーカット機能は、サポート構造が配置された領域をクリーンアップするために、回転工具サンディングビットで仕上げられました。これは、駆動モーター、ネジ穴、およびその他のコンポーネントを配置するために重要でした。

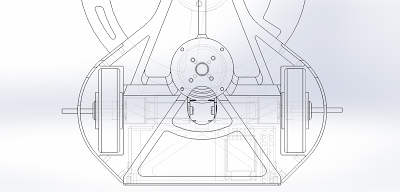
重要な電子機器は、専門家レベルのテトリススキルを使用して設計した小さな立方体にパッケージ化されました。この小さな立方体には、オレンジRXレシーバー、武器用のTurnigy Plush 10 ESC、および各スパークモーター用の2つのVex29モーターコントローラーが含まれています。

エレクトロニクスキューブは、そのようにフレームに収まるように設計されています。

モーターはv2からリサイクルされ、ロボットは配線されました。最近Fingertechスイッチに不運があり、懐疑的だったので、専用の電源スイッチは使用しませんでした。これの代わりに、私はバッテリーへの直接接続を使用することを選択しました。
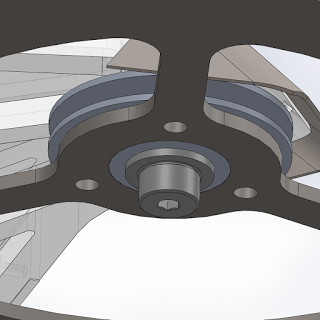
ブレードとプーリーのインターフェースも変更されました。以前のようにベアリングをブレードのボア内に直接配置する代わりに、両方のベアリングをハブに配置し、ブレードをプーリーにボルトで固定します。プーリーの丸いフィーチャーは、ブレードをプーリーと同心円状に結合します。この方法は、シャフトアセンブリ全体を分解せずにブレードを交換できるため、優れています。スキューがブレードとプーリーの位置合わせに依存しなくなるため、位置ずれが減少し、ソフトを配置することでベアリングの衝撃が減少します。ベアリングの外径とブレードの間の中間。
最後に、サイドアーマーはサイドを包み込むように作られました。これらは、丈夫でありながら柔軟性のある0.0625ポリカーボネートからカットされました。しかし、この短い長さと厚さでは、側面を装着するのが難しく、かなりのプリロードがかかっていました。私はこれらに特に大きな期待はありません。見越して、私はいくつかのコピーを作成しました。


最終重量は15.5オンスでした!非常に快適な体重と改善の余地があります。
暫定パフォーマンス
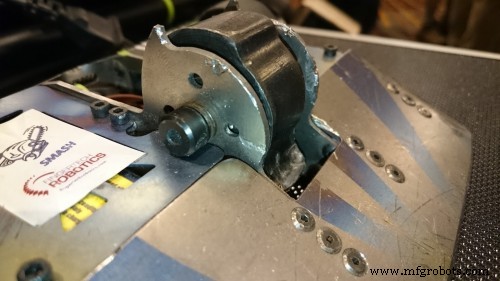
DDTには多くのアイテムを粉砕する機会がありました。しかし、実際には1ポンドの重さはありませんでした。それでも、これらのテストでは、UHMW、アルミニウム、さらには他の3Dプリントされたナイロン部品に著しい損傷が見られました。 v2フレームを永続的に送信するためのより良い方法を考えることはできませんでした!

ドラゴンコン2015マイクロバトル
DDTv3のデビューはDragonCon 2015で、4試合が行われ、3勝1敗でした。その性能とプリントフレームの弾力性に非常に満足しています。非常に多くのヒット(アリーナの壁のヒットを含む)の後に武器のシャフトボアが開くことを半分期待していましたが、おそらく限界寸法の周りの重いケブラーの充填のために、最初に作られたときと同じです。 DDTの戦いは以下に埋め込まれています。何度かピットから飛び出さなかったのはとても幸運でしたが、残念ながらアルゴスへの強い打撃でDDTがピットに飛び込んだときに運が尽きました。
DDTは、Green Reaperがブレードを乗り越えてフレームを噛み始めたときに、ある程度のダメージを受けました。あまりダメージが与えられていないのを見て驚いたが、それは私のブレードが彼をフレームに押し込まないようにしていたからだ。さもなければ、もっと多くのダメージが確実に与えられたであろう。繊維の一部が露出しているため、深さは約0.6mmになります。両方のホイールガードがアルゴスに対して爆発しましたが、飛ぶ前に彼の0.0625の厚さのTiに素敵なマークを残すことができました。


DDTが他のantweightsに挑戦する機会をもっと見つけたいです。 10月に2つの大会が近づいています。私はDDTをそこに持ってくるために一生懸命努力します。しばらくお待ちください!
3Dプリント