


Arduino / Android-BLUETOOTHマルチサーボモーター制御
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
このプロジェクトについて
<図>

こんにちは世界!昨日1サーボコントロールアプリを作ってマルチコントロールを作ると言ったので、これがマルチコントロールアプリです!また、より良いArduinoコードを作成しました。回路図、コード、部品リスト、アプリについては、次の手順に従ってください。
アプリを入手する: GOOGLE PLAY
ソースコードが必要な場合は私に連絡してください!
ステップ1:パーツリスト
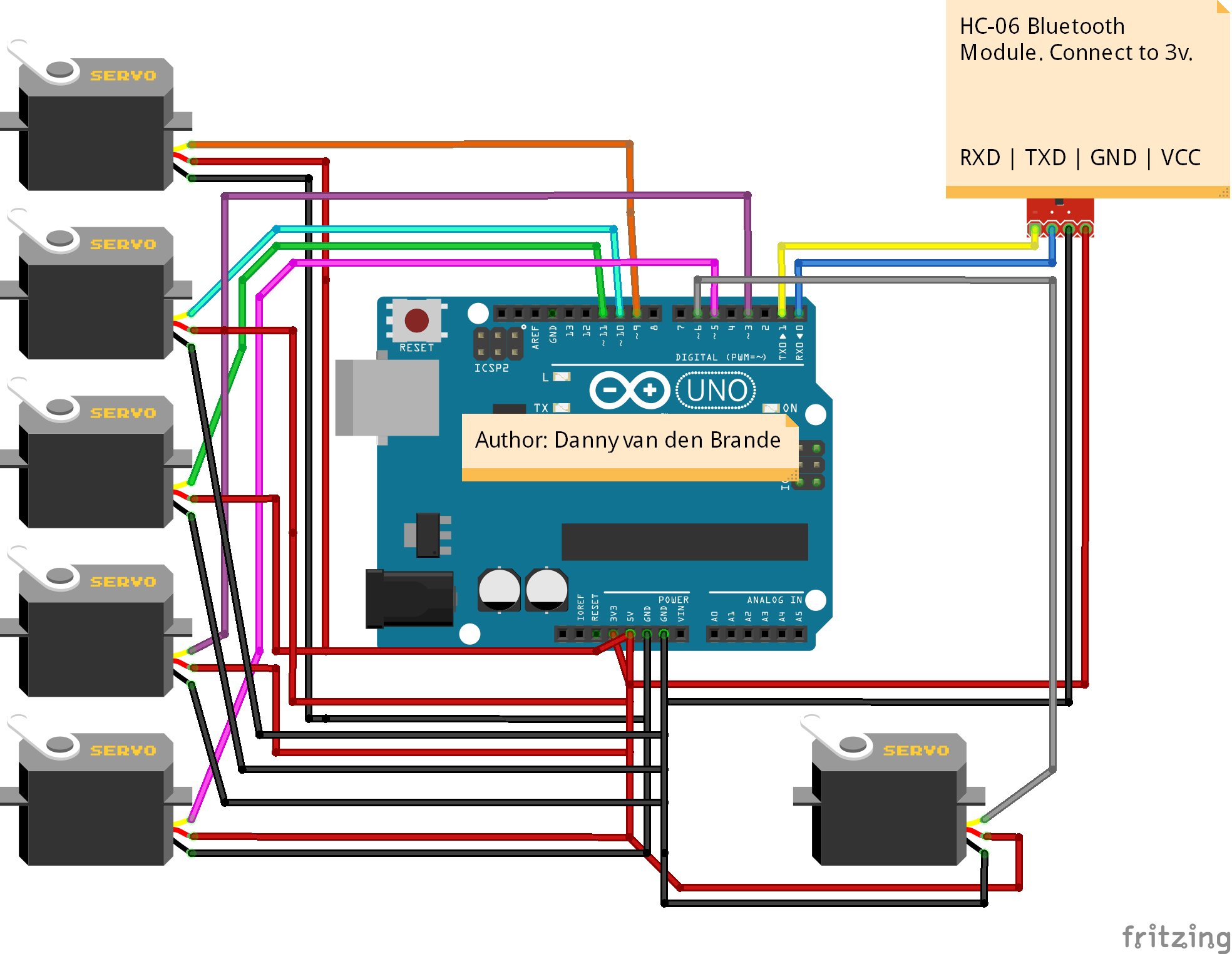
回路図のようにすべてを接続し、コードをアップロードし、アプリをダウンロードし、デバイスをペアリングした後にBluetoothを接続すると、機能するはずです。 RXDをTXに、TXDをRXに接続してください。
また、アップロードするときはBluetoothモジュールを接続しないでください。
パーツリスト:
- Arduino Uno、( 6つ以上のサーボを使用したい場合はメガを使用してください!)私はを使用しました RobotDynUno。
- HC-06 Bluetoothモジュール、またはその他。
- 6xサーボモーター。 (もちろん1つでテストできます )
- ジャンパー線セットMM / FF / MF
- Androidフォン。
頑張ってください!
次の手順に従って、Bluetoothモジュールの名前、ピン、およびボーレートを変更する方法を確認してください。 (オプション )
ステップ2:HC-06の名前を変更する方法
何が必要ですか?
- HC-06に接続するための1x USB toTTLマイクロコントローラープログラマー
プログラマーを接続する方法は?
- VCCからVCC
- GNDからGND
- RXDからTX
- TXDからRXへ
始めましょう:
- USBTTLプログラマーをHC-06に接続します。
- USBを接続し、ArduinoIDEを開きます。
- シリアルモニターを開きます。
- 引用符なしで「AT」と入力します。シリアルモニターに「OK」という応答が表示されるはずです。
- 「AT + NAMExyz」と入力します。モジュール名を「xyz」に設定します(xyzを必要な名前に置き換えます)。応答はOKsetnameである必要があります。
- 「AT + PIN1234」と入力します。ピンを1234に設定します(1234を目的のピンに置き換えます)。応答はOKsetPINである必要があります。ボーレートの変更などの詳細については、PDFファイルを含めました。頑張ってください!
コード
- BLUETOOTH_Servo_Control_Multi_Servo.ino
BLUETOOTH_Servo_Control_Multi_Servo.ino Arduino
複数のサーボを制御するコード。/ *作成者:Danny van den Brande。このコードを使用すると、Androidアプリを使用して複数のサーボモーターを制御できます。ピンがなくなるまで、必要な数だけ追加できます。コードにサーボを追加できます。アプリのソースが必要な場合は、私に連絡してください。 * /#includeサーボmyservo1、myservo2、myservo3、myservo4、myservo5、myservo6、myservo7、myservo8、myservo9、myservo10; byte serialA; void setup(){myservo1.attach(9); myservo2.attach(10); myservo3.attach(11); myservo4.attach(3); myservo5.attach(5); myservo6.attach(6); // myservo7.attach(); 6つ以上のサーボを使用する場合は、ピン番号を入力します。空白のままにしました// myservo8.attach(); // myservo9.attach(); // myservo10.attach(); Serial.begin(9600); //必要に応じてボーレートをBluetoothモジュールのボーレートに変更します。} voidloop(){if(Serial.available()> 2){serialA =Serial.read(); Serial.println(serialA );} {unsigned intservopos =Serial.read(); unsigned intservopos1 =Serial.read(); unsigned int realservo =(servopos1 * 256)+サーボポス; Serial.println(realservo); if(realservo> =1000 &&realservo <1180){intservo1 =realservo; Servo1 =map(servo1、1000,1180,0,180); myservo1.write(servo1); Serial.println( "servo 1 ON"); delay(10); } if(realservo> =2000 &&realservo <2180){intservo2 =realservo; Servo2 =map(servo2,2000,2180,0,180); myservo2.write(servo2); Serial.println( "servo 2 On"); delay(10); } if(realservo> =3000 &&realservo <3180){intservo3 =realservo; Servo3 =map(servo3、3000、3180,0,180); myservo3.write(servo3); Serial.println( "servo 3 On"); delay(10); } if(realservo> =4000 &&realservo <4180){intservo4 =realservo; Servo4 =map(servo4、4000、4180,0,180); myservo4.write(servo4); Serial.println( "servo 4 On"); delay(10); } if(realservo> =5000 &&realservo <5180){intservo5 =realservo; servo5 =map(servo5、5000、5180,0,180); myservo5.write(servo5); Serial.println( "servo 5 On"); delay(10); } if(realservo> =6000 &&realservo <6180){intservo6 =realservo; Servo6 =map(servo6、6000、6180,0,180); myservo6.write(servo6); Serial.println( "servo 6 On"); delay(10); } // if(realservo> =7000 &&realservo <7180){// 6つ以上のサーボを使用している場合はコメント解除// intservo7 =realservo; // servo7 =map(servo7、7000、7180,0,180); // myservo7 .write(servo7); // Serial.println( "servo 7 On"); // delay(10); //} //// if(realservo> =8000 &&realservo <8180){// intサーボ8 =realservo; // servo8 =map(servo8、8000、8180,0,180); // myservo8.write(servo8); // Serial.println( "servo 8 On"); // delay(10); //} / /// if(realservo> =9000 &&realservo <9180){// intservo8 =realservo; // servo8 =map(servo9、9000、9180,0,180); // myservo8.write(servo8); //シリアル。 println( "servo 9 On"); // delay(10); //} //// if(realservo> =10000 &&realservo <10180){// intservo10 =realservo; // servo10 =map(servo10、 10000、10180,0,180); // myservo10.write(servo10); // Serial.println( "servo 10 On"); // delay(10); //}}}
回路図
製造プロセス