


コントローラー付きロボットアーム
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
オボットアームとそのコントローラーを作りました。
憲法
ロボットアームは3つの従来のPWMサーボを使用し、各角度は可変抵抗器によって制御されます。回転式ポテンショメータはBカーブ10kオームを使用しました。
<図>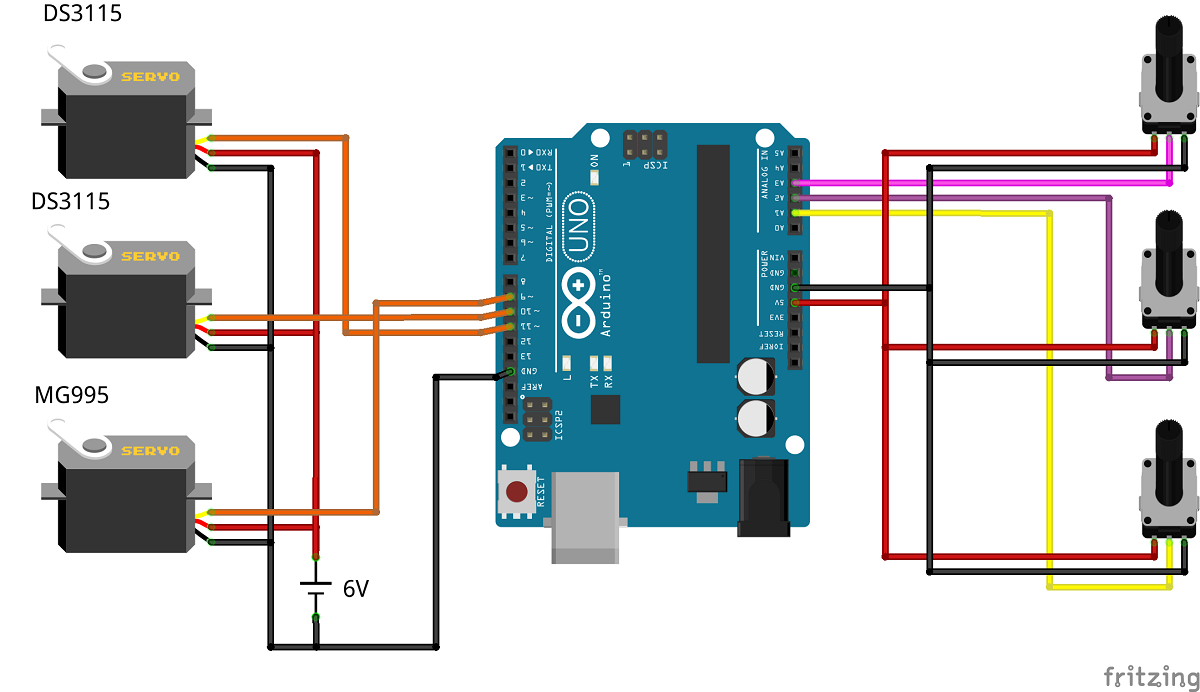
ロボットアームの製造
垂直方向にはDS3115サーボモーターを2台使用し、スイング方向にはMG995サーボモーターを使用しました。
<図>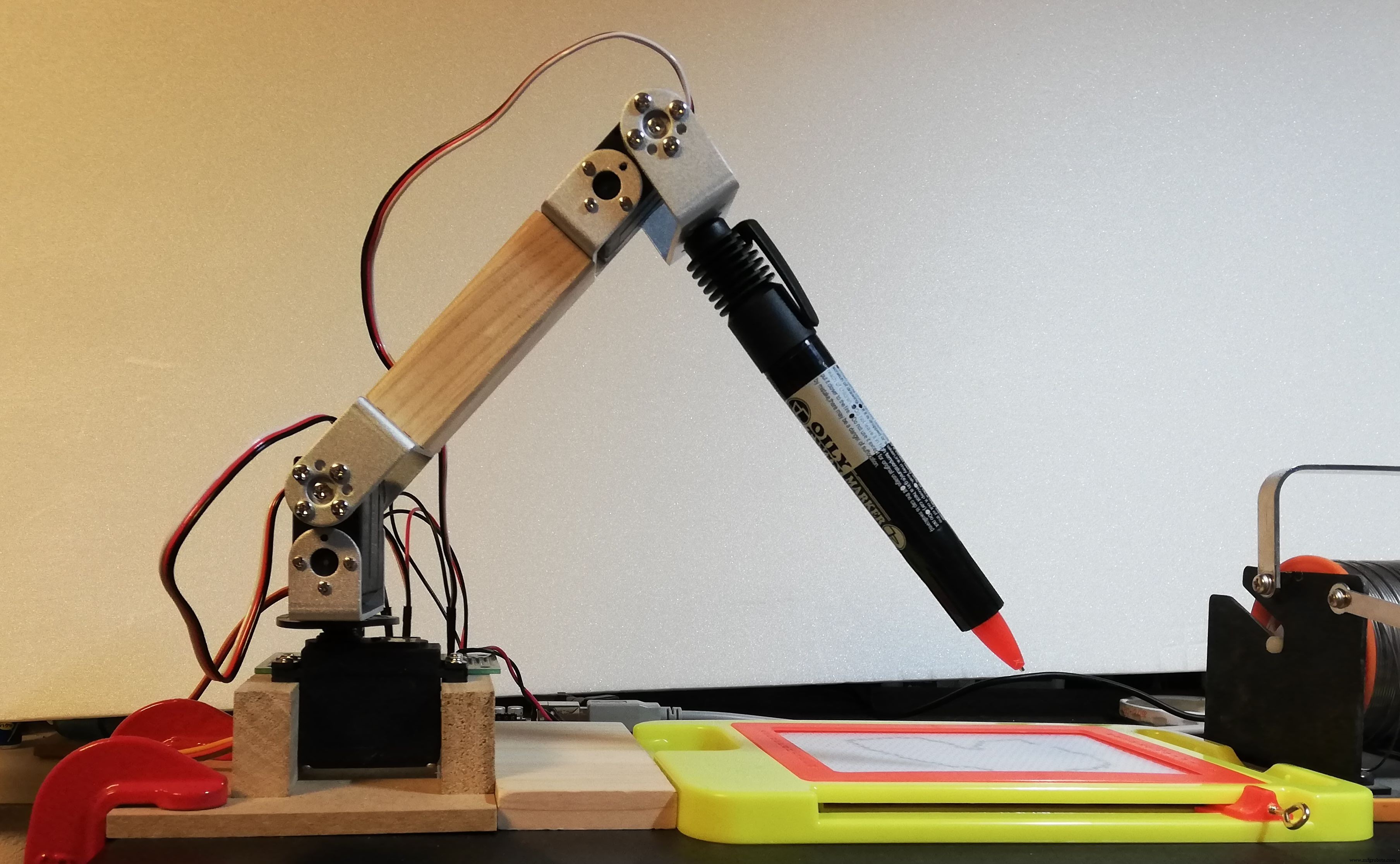
コントローラーの生産
3Dプリンターでコントローラーケースを作りました。
<図>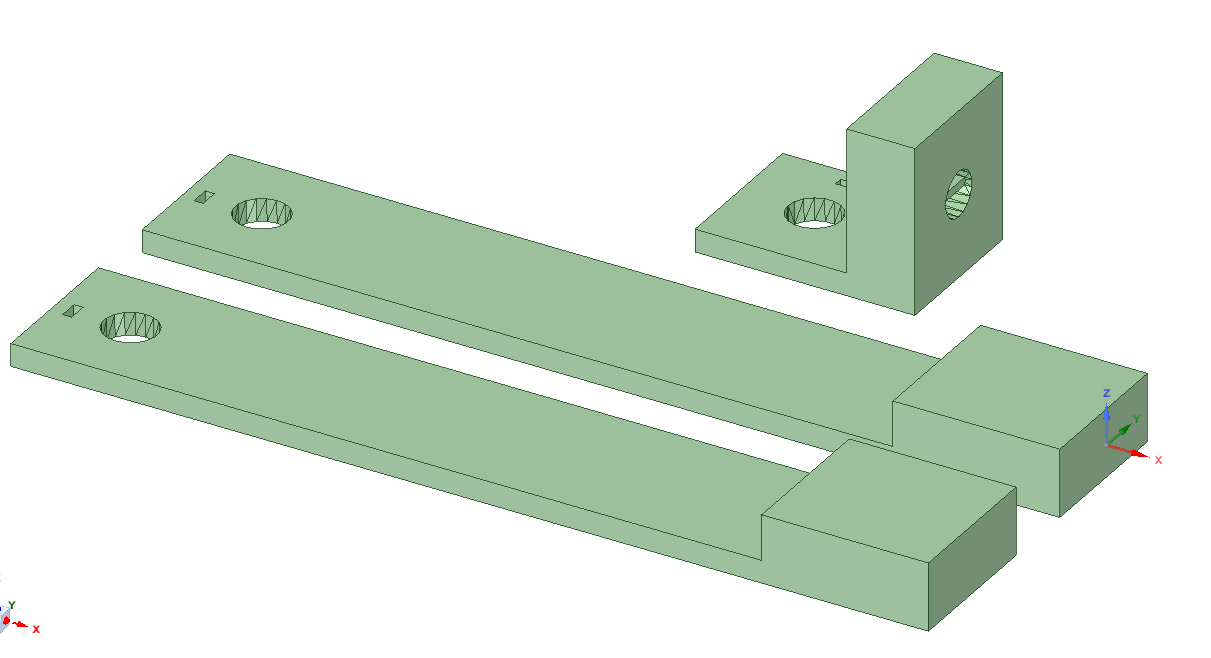
回転式ポテンショメータのつまみをねじ込むための穴と位置決め穴、つまみを挿入するためのへこみがあります。
<図>
製造した部品と3つの回転式ポテンショメータを組み立てて完成させます!
これで、回転式ポテンショメータがロボットアームのサーボモーターの回転軸と同じ方向に配置されました!
Arduinoコード
この単純なコードは、アナログピンを使用して回転ポテンショメータの値を読み取り、それを角度に変換して、対応するサーボに入力するだけです。
#include
Servo myservo1、myservo2、myservo3;
float th1 =90.0、th2 =90.0、th3 =90.0;
float val1、val2、val3;
void setup(){
Serial.begin(9600);
myservo1.attach(9、500、2420); // MG995
myservo2.attach(10、820、2140); // DS3115
myservo3.attach(11、820、2140); // DS3115
set_servo();
}
void loop(){
val1 =analogRead(A1);
val2 =analogRead(A2);
val3 =analogRead(A3);
th1 =map(val1、170.0、880.0、0.0、180.0);
if(th1> =180.0){
th1 =180.0;
} else if(th1 <=0.0){
th1 =0.0;
}
th2 =map(val2、150.0、860.0、 0.0、180.0);
if(th2> =180.0){
th2 =180.0;
} else if(th2 <=0.0){
th2 =0.0;
}
th3 =map(val3、860.0、160.0、0.0、180.0);
if(th3> =180.0){
th3 =180.0;
} else if(th3 <=45.0){
th3 =45.0;
}
set_servo();
}
void set_servo( ){
myservo1.write(th1);
myservo2.write(th2);
myservo3.write(th3);
}
操作
回転式ポテンショメータを配線し、Arduinoに接続して完了します!
カスタムパーツとエンクロージャー
製造プロセス