


紫外線によるロボットの消毒
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
必要なツールとマシン
>  |
|
このプロジェクトについて
ロボットの紹介
紫外線殺菌ロボット(UVロボット)は、UVライトシステムを搭載した遠隔操作ロボットです。このシステムには、移動ロボット車両と地上局コントローラー(GCS)が含まれています。オペレーターは、ロボットのカメラフィードを観察しながら、地上局コントローラー(GCS)のジョイスティックを使用してロボットを制御できます。
ロボットは、DNA構造を破壊することにより、紫外線を使って、環境中の病気、ウイルス、バクテリア、その他の種類の有害な有機微生物を消毒して殺すことができます。現在、いくつかの国では、病院、公共交通機関、オフィススペース、およびその他の公共の場所を消毒するために、これらのロボットのテストに成功しています。このUVロボットを費用効果の高い方法で実装し、消毒プロセスを公共の場所に拡大しました。
消毒液を使ってみませんか?
<図>
公共の場所を消毒するための最も一般的で一般的な方法は、70%アルコールベースの液体である消毒液をスプレーすることです。最近、世界保健機関(WHO)は、公共の場所で消毒液を定期的に使用することは非常に有害であると発表しました。これは、強い香りのために呼吸器系に問題を引き起こし、皮膚の炎症を引き起こし、環境の不均衡につながる可能性があります。
さらに、この方法は、日常的に莫大な材料費と人件費を伴います。
UVロボットの利点
- 1回限りの費用(アルコールや塩素の液体を補充する必要はありません)。
- 表面、医療用スーツ、医療用マスク、その他の医療機器の消毒に使用できます。
- 液体ベースの消毒方法と比較して、消毒時間を60%短縮します。 (生地素材が利用できる環境で使用すると、乾燥時間はかなり長くなります。)
- 電子機器のある環境で使用する機能。
- 1人のオペレーターが広い範囲をカバーできます。 (液体スプレーのように複数の人がいる必要はありません)
- 99.997%の消毒率をテストし、証明しました。 地元の大学の微生物学研究室と協力してこのロボットのために。 (前のセクションで説明しました)
紫外線殺菌照射(UVGI) <図>
紫外線殺菌照射(UVGI)は、短波長の紫外線(紫外線CまたはUVC)光を使用して、核酸を破壊し、DNAを破壊して微生物を殺すか不活化し、重要な細胞機能を実行できないようにする消毒方法です。 UVCはRNAおよびDNA塩基に吸収され、2つの隣接するピリミジンが共有結合した二量体に光化学的に融合し、非対になる塩基になる可能性があります。
UVGIは、食品、空気、水の浄化など、さまざまなアプリケーションで使用されます。 UVGIは、特定の感染症の蔓延を防ぐために使用できます。低圧水銀(Hg)放電ランプとLEDは、UVGIアプリケーションで一般的に使用され、主に254 nmで短波紫外線C(100〜280ナノメートル)放射を放出します。
微生物の種類ごとに、その機能を不活性化するために異なる線量の紫外線が必要です。 Covid-19の状況を考慮して、ここではUV光を使用した同じウイルスの不活化を検討します。ほとんどの研究論文や記事では、研究グループが「1平方メートルあたりのジュール」または「1平方メートルあたりのジュール」の観点から滅菌プロセスに必要なUV光について言及しています。しかし、UV光のパラメータと仕様を検討する際、メーカーは1メートルの距離で「1平方センチメートルあたりのマイクロワット(uW)」の観点からUV光の強度を示しています。
単位「ワット(W)」は、1秒以内に放出されるエネルギーを表します。 1平方センチメートルあたりのマイクロワットは、1秒以内に1平方センチメートルの領域を通過するエネルギーを表します。
<図>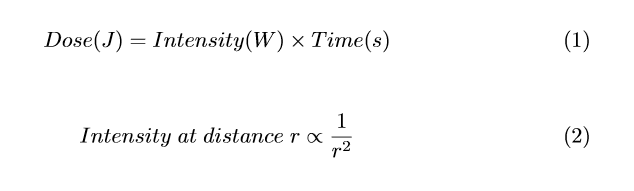
方程式 1 投与量と強度の関係を示しています。同じUV光源への曝露時間を変えることで、異なる投与量を達成できると結論付けています。
UV強度と距離の関係は式 2で示されます。 それによると、UV強度は光源からの距離とともに低くなると結論付けることができます。
ウィキペディアによると、8mJの線量でほとんどのウイルスを不活化することができます。
ロボットの機能を理解する
業界標準に準拠するためにいくつかの機能と安全機能を追加したため、システム全体は少し複雑です。実装手順を説明する前に、システムがどのように機能するかを理解しておくとよいでしょう。
ロボットには3つの主要コンポーネントがあります。
1。地上車両
<図>
この部分は、DCギヤードモーター(差動駆動ロボット)を動力源とする2つの車輪によって動かされます。バランスを保つために、前後に2つのキャスターホイールがあります。電子制御システムと、12V35Ah鉛蓄電池であるバッテリーを地上車両内に配置しました。
<図>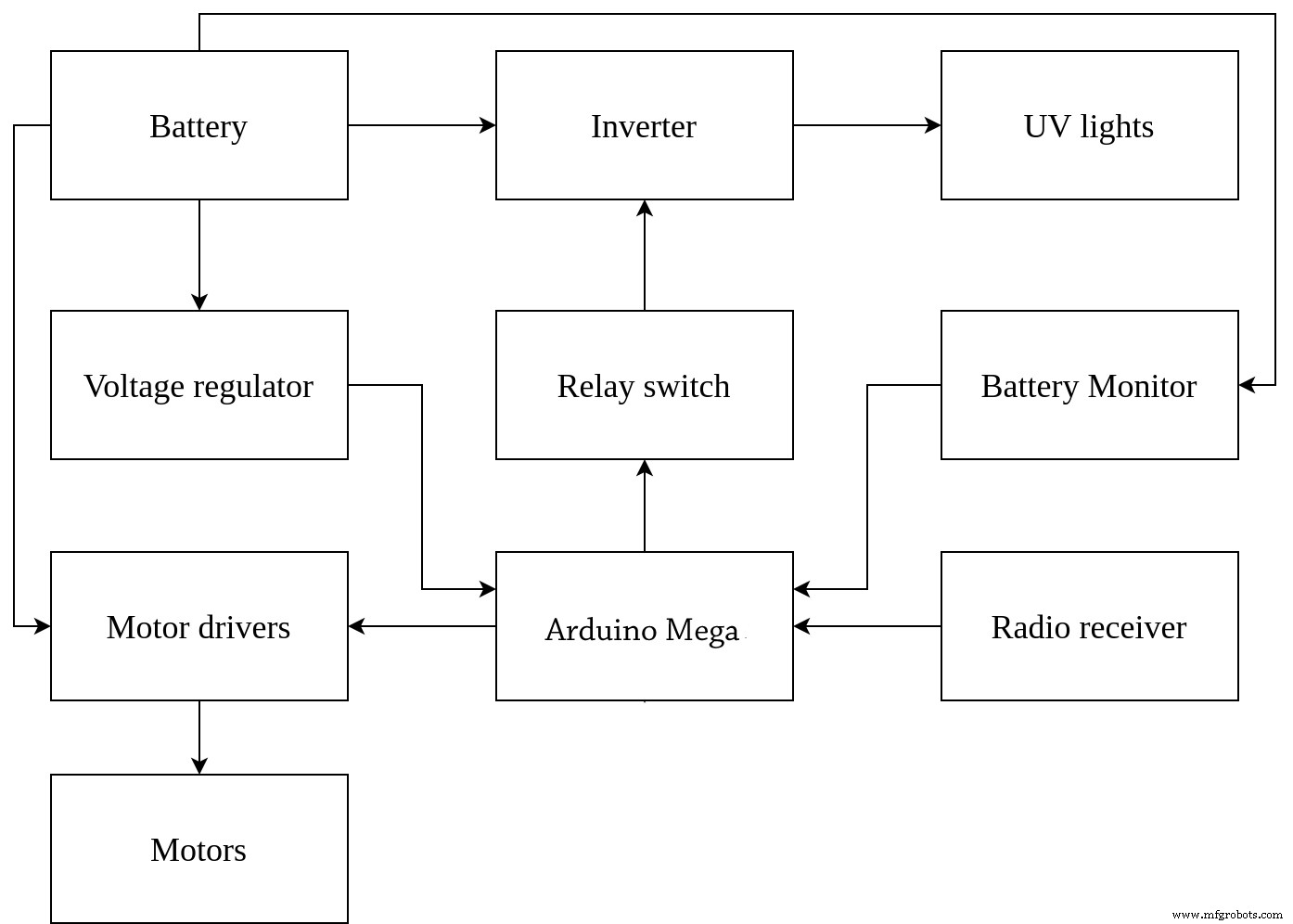
Arduino Megaは、電圧を12Vから5Vに下げるために、電圧レギュレータモジュールを介してメインバッテリから電力を供給されます。メガボードには、PWM出力を備えた4チャンネルのRCラジオ受信機が接続されています。モーターは、Arduinoボードに接続されたデュアルチャネルHブリッジモータードライバーを介して駆動されます。インバーターはUVライトとバッテリーの間に接続され、Arduinoボードに接続されたリレースイッチを使用して制御されます。
2。 UVライトタワー
電球に電力を供給するために別の電子バラストユニットを必要とする蛍光UV電球を使用しました。ライトタワーには6個のUV電球があり、アルミシートを丸めて作ったアルミシリンダーの周りに配置されています。このアルミシリンダーは紫外線の反射板として機能します。
<図>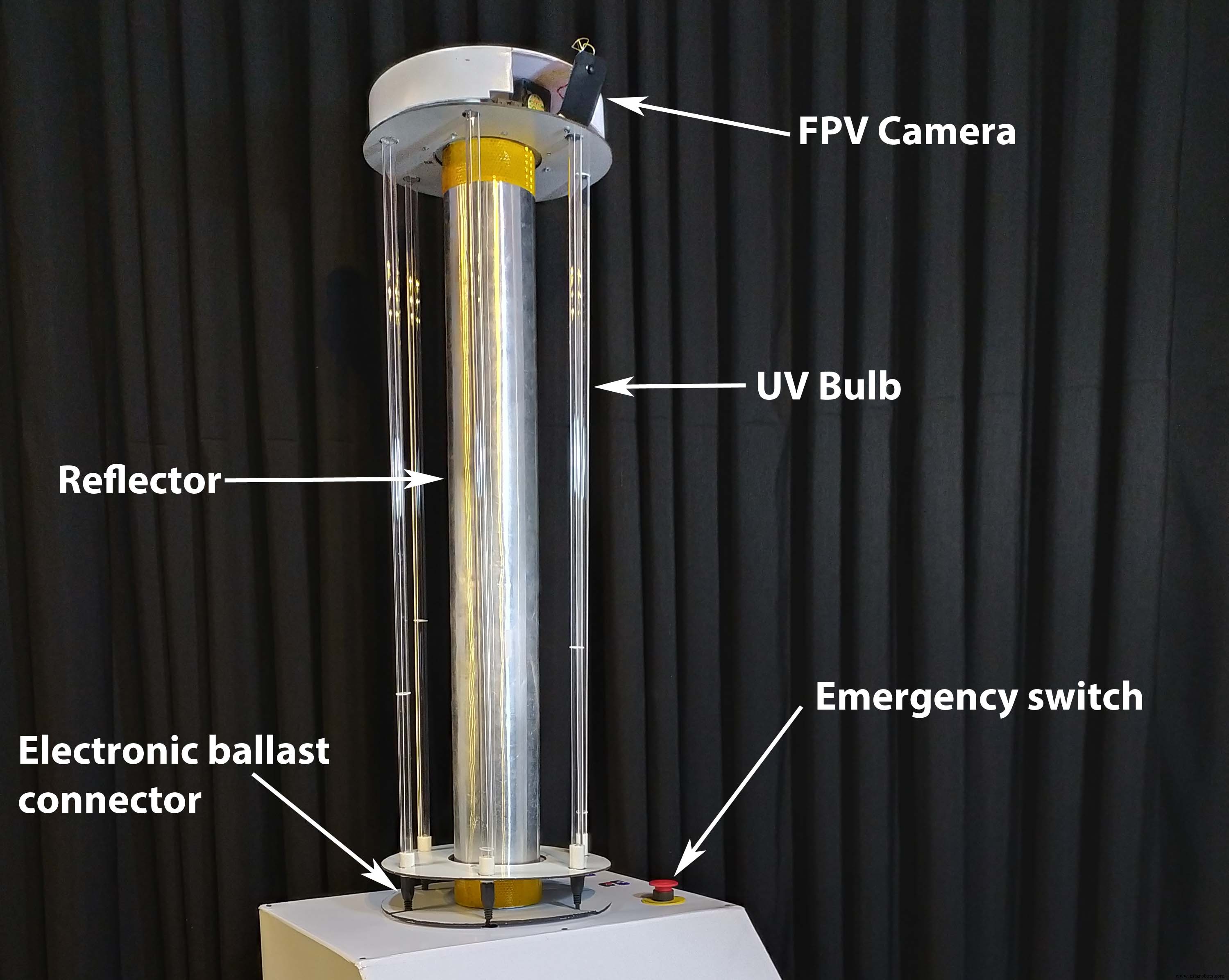
すべての電子バラストは、アルミニウムシリンダー内に配置されています。タワーの上部には、ビデオフィードをGCSに送信するためのFPVカメラとFPV送信機があります。 UVタワーは地上車両の上に固定されています。
3。地上局コントローラー
<図>
ロボットのリモコンです。画面には、ロボットから受け取ったカメラのフィードバックが表示されます。ジョイスティックはロボットを動かすために使用されます。 UVスイッチを使用してUVライトのオンとオフを切り替えることができます。アーミングスイッチは安全スイッチとして機能します。オンにすると、のすべての機能が削減されます。
UVライトの電源を入れる
<図>
私たちのロボットには、次の仕様の6つのUV電球を選択しました。
- 電力-55w
- 波長-254nm
- 長さ-890mm
- チューブの直径-15mm
- タイプ-シングルエンド4ピン
これらは波長以外の厳密な仕様ではありません。電子バラストユニットは、UV電球の4つのピンに接続されています。電子バラストに電力が供給されると、UV電球が点灯します。
<コード> *** UVライトは人間の皮膚や目に有害です。目や皮膚を長時間露出させないでください。 UV光は透明なガラスを透過できないため、ガラス越しに光を観察するのが最も安全な手順です。***
FPVビデオシステム
<図>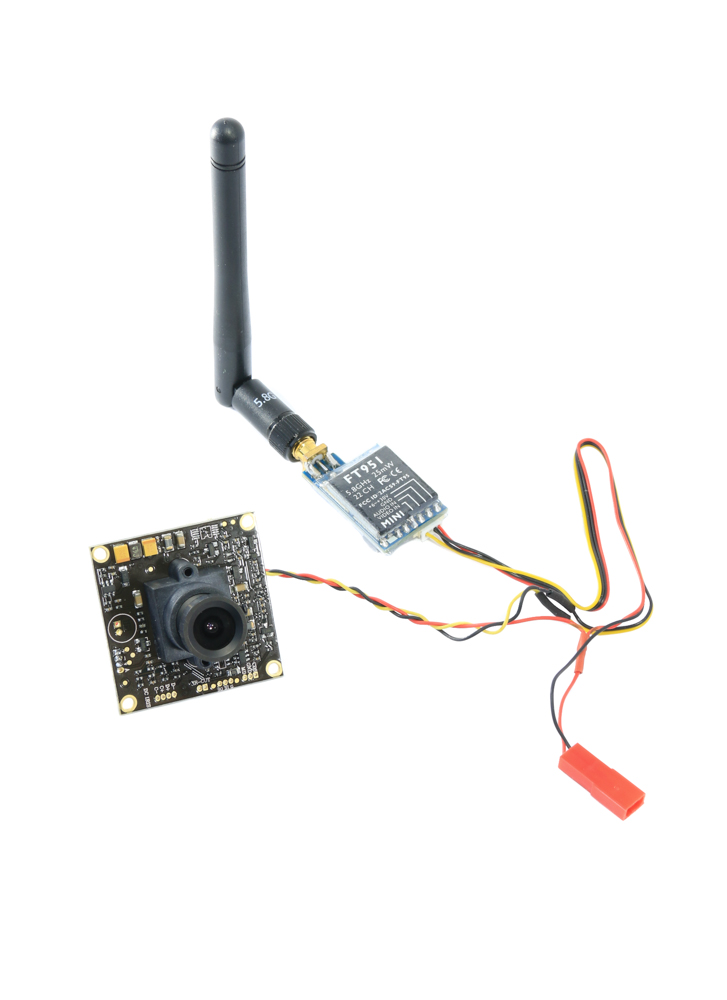 <図>
<図> 
FPV ビデオシステムは、主にドローンで鳥瞰図を取得するために使用されます。私たちの場合、FPVシステムを使用すると、プログラミングやコンポーネントのはんだ付けをしなくても、ロボットからビデオフィードを簡単に取得できます。ロボットにはカメラとビデオ送信機があります。このシステムに電源を接続するだけで、5.8GHzを使用してビデオフィードの送信が開始されます。
GCSには、5.8GHzビデオレシーバーを内蔵したLCD画面があります。画面の電源を入れると、カメラフィードが表示され始めます。
地上車両の構築
主な構造は0.75フィートのスチールボックスバーで作られています。以下は私たちのロボットに使用されているデザインですが、それに限定されません。要件に応じてデザインを変更します。
<図>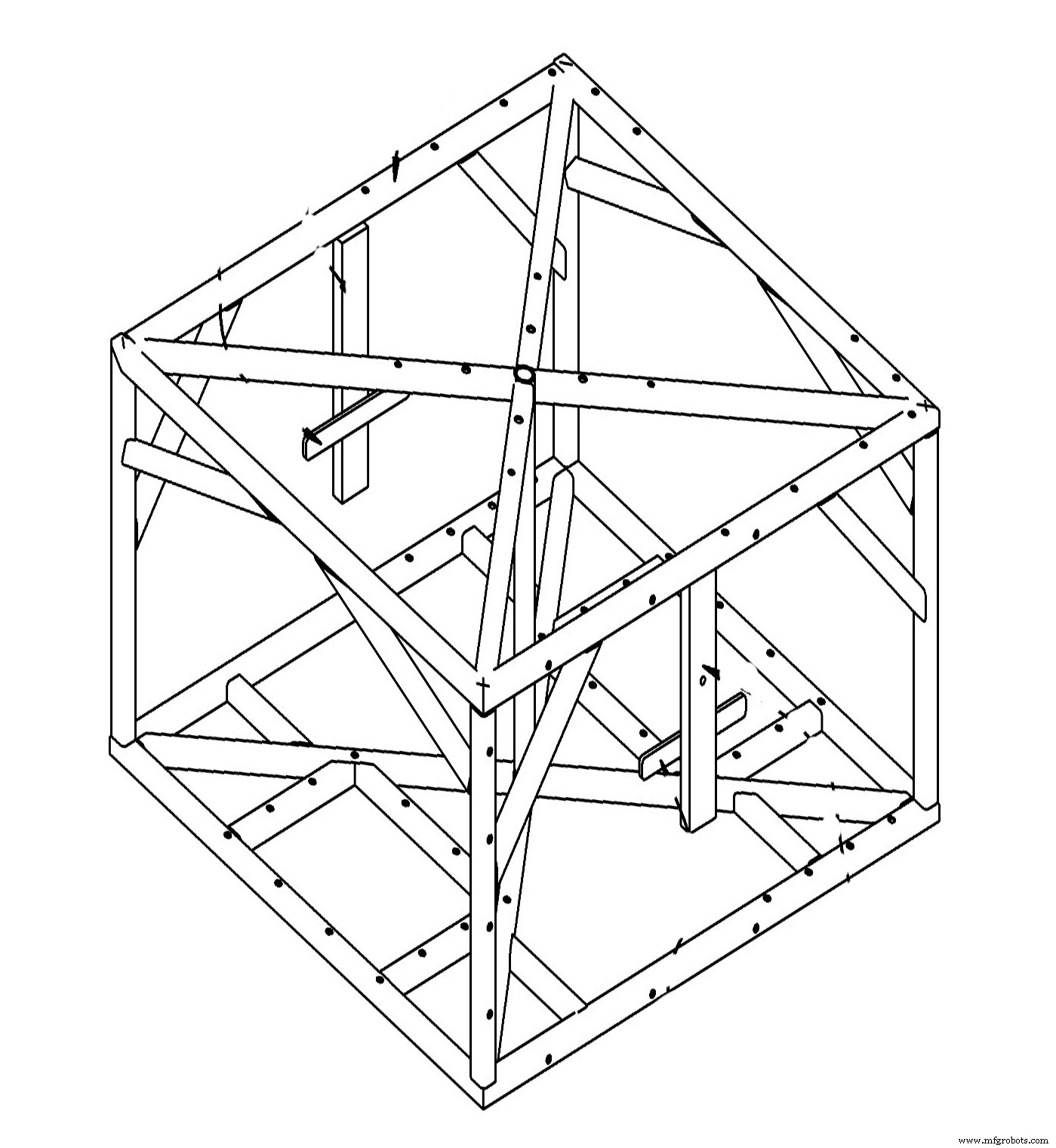
フレームには、下部に2つのモーターと2つのキャスターホイールを取り付けるためのスペースとメカニズムが必要です。構造物の内部には、鉛蓄電池をロックするメカニズムが必要です。私たちのロボットでは、フレームを覆うためにクラッディングボードを使用しました。
2つのモーターのワイヤーは、モータードライバーの出力ピンに接続されています。この手順はインターネット上で簡単に見つけることができるため、手順全体を説明することを目的としたものではありません。
最後に電子制御システムの概略図を添付します。 RCレシーバーのチャネル1-チャネル4PWM信号ピンはピン18-21からArduinoボードに接続されています。各チャネルはコードで次のように構成されています。必要に応じて変更できます。
- Ch1-UVスイッチ
- Ch2-ロボットアーミングスイッチ
- 第3章-前方/後方移動コマンド
- Ch4-左/右回転コマンド
これは、GCSを構築するときにも変更できます。
<図>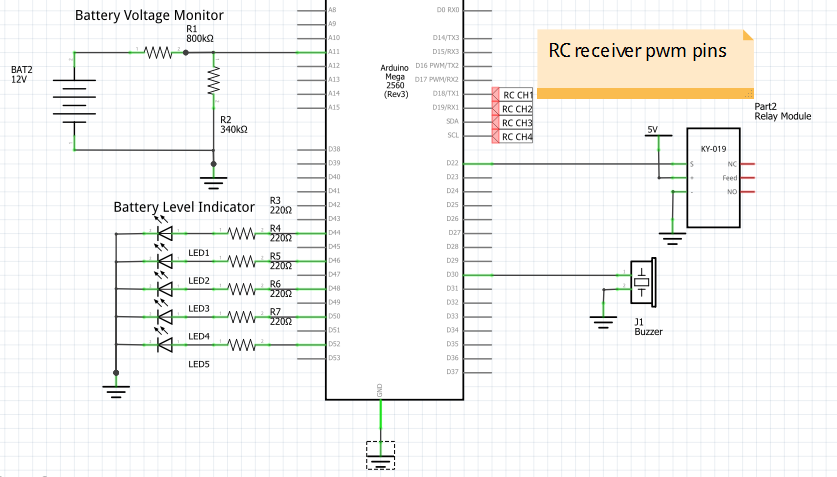
回路図に示すように、モータードライバーのピンはArduinoのピン3〜11に接続されています。
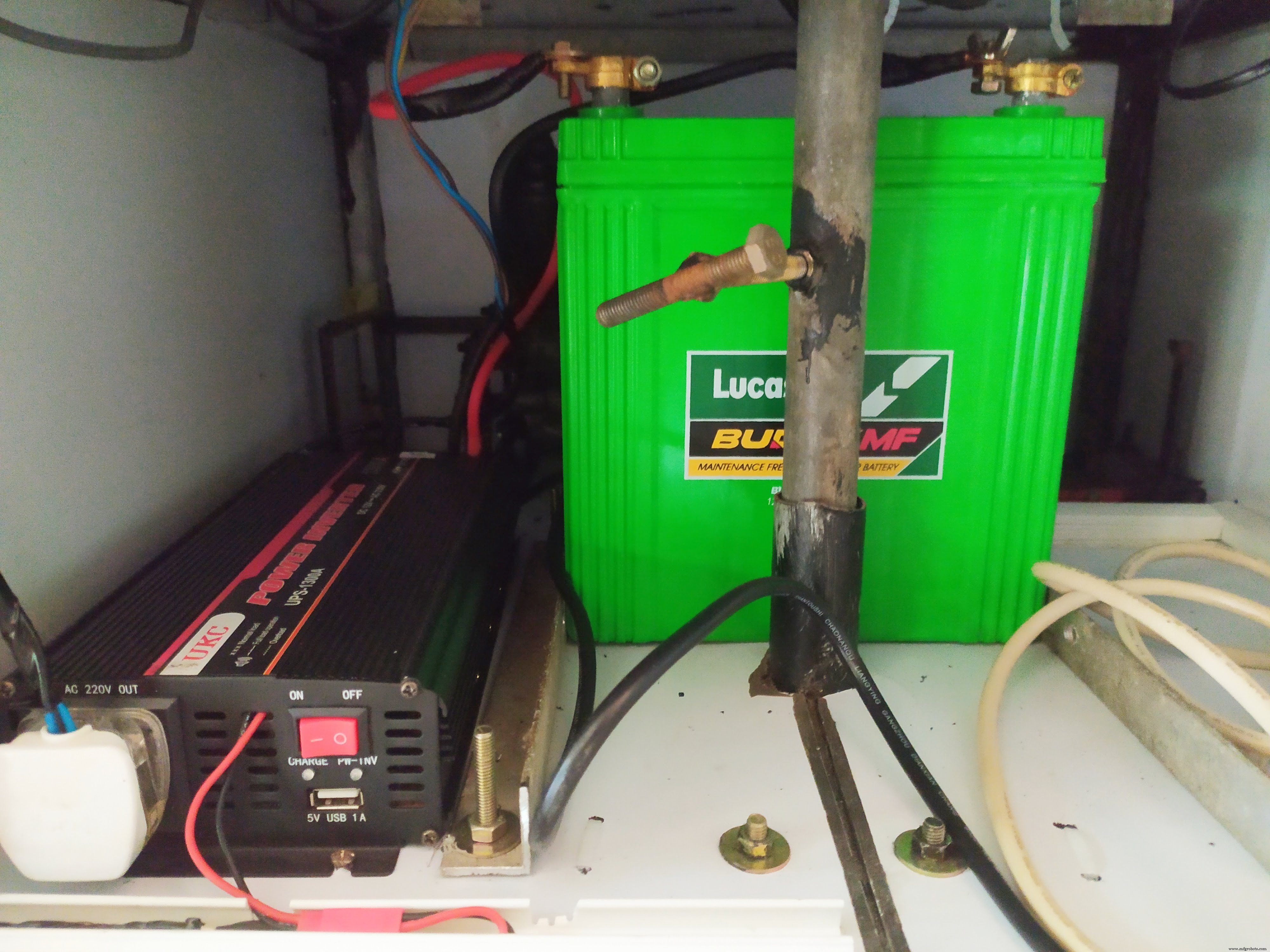
12vをAC230Vに変換してUVライトに電力を供給するために、ここではインバーター回路が使用されます。充電器を内蔵した市販のインバータユニットを購入しました。これにより、既存の電源ポイントを使用して鉛蓄電池を充電できるため、電子システムの複雑さを回避できます。
<図>
私たちの場合、約70%の効率を持つ修正正弦波インバーターを使用しました。 70%の効率ですべての電子バラストに電力を供給するために必要なインバーターのワット数は470Wです。すべての安全マージンを考慮して、1kWのインバーターを購入しました。
バッテリー端子は12V入力に接続され、E。バラストはAC出力ポートに接続されます。オン/オフスイッチが削除されます。スイッチには3本のワイヤーがあります。普通線、アース線、および電源オン線。これらの3本のワイヤーは次の方法でリレースイッチに接続され、ArduinoボードからのUVライトを制御します。
- 共通線->共通
- アース線-> NC
- 電源オンワイヤー->いいえ
ロボットを工業規格に準拠させるために、システム電源オンスイッチ、UV電源オンスイッチ、緊急遮断スイッチが含まれています。
UVライトタワーの構築
塔の中央部分にはアルミシートが入っています。シートを丸めて直径15cmの円筒を作ります。シリンダーの上下に直径30cmの円形のクラッディングボードを2枚配置します。これらはUVランプホルダーとして使用されます。両方のクラッディングボードは、UV光に合うように19mmの穴が開けられています。 E.バラストは、両面粘着テープを使用してアルミニウムシリンダー内に固定されています。
<図> <図>
<図> 
FPVカメラシステムはタワーの上部に取り付けられ、2本のワイヤーがシリンダーを通して下部に運ばれます。
地上管制局の建設 <図>

以下は、地上管制局(GCS)に必要なコンポーネントです。
- 2.4GHZ 4ChRC送信機
- FPV画面
- 2Xトグルスイッチ
- 1X電源スイッチ
- 18650バッテリーセル
- 18650用の3セルバッター管理システムモジュール
- 12V、5Aスイッチモード電源
Rcトランスミッターには2つのジョイスティックといくつかのスイッチが含まれています。ここでは、1つのジョイスティック、回路、およびインジケータLEDのみに関心があります。送信機の筐体を取り外し、ジョイスティックが回路によってどのように感知されるかを観察します。各ジョイスティックには、回路基板に接続された2つのポテンショメータが含まれています。ジョイスティックの位置に基づいて、ポテンショメータは抵抗を変更し、回路がジョイスティックの位置を読み取れるようにします。
<図>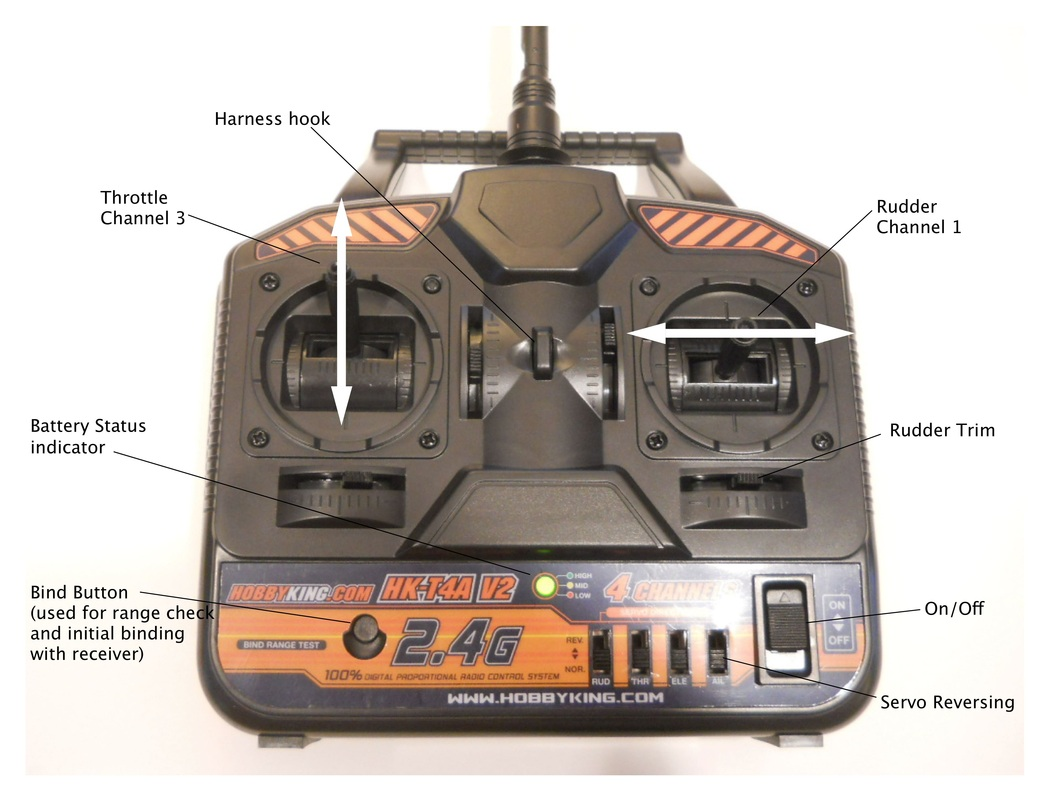 <図>
<図> 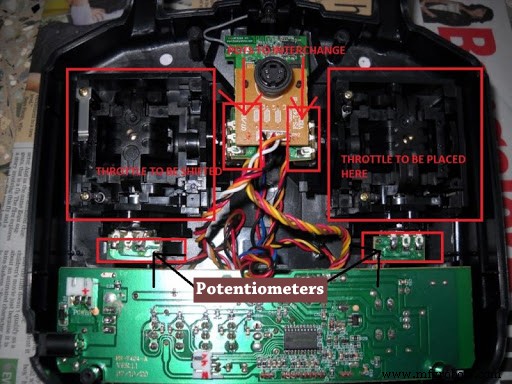
1つのジョイスティックとその2つのポテンショメータを取り外します。それぞれのワイヤーの端を2つのトグルスイッチにはんだ付けします。これで、4つのチャネルすべてを制御するための1つのジョイスティックと2つのトグルスイッチができました。 1つのスイッチはロボットのアーミングスイッチとして機能し、もう1つのスイッチはUV光制御スイッチとして機能します。インジケーターLEDは、バッテリー残量が少なくなると色が赤に変わるため、GCSのバッテリーモニターとして使用できます。
次に、送信機とFPV画面用の電源を作成する必要があります。 18650バッテリーのセル電圧は3.7Vです。完全に充電すると4.2Vになります。このために、3つのセルを直列に接続して約12Vを取得します。私たちの場合、1000mAhの容量のセルを使用しました。 GCSの稼働時間を長くするために、9個のバッテリー、3個の直列接続されたセルセットを並列に使用して、3000mAhの容量を得ました。次に、BMSモジュールを接続してバッテリーを保護します。
<図>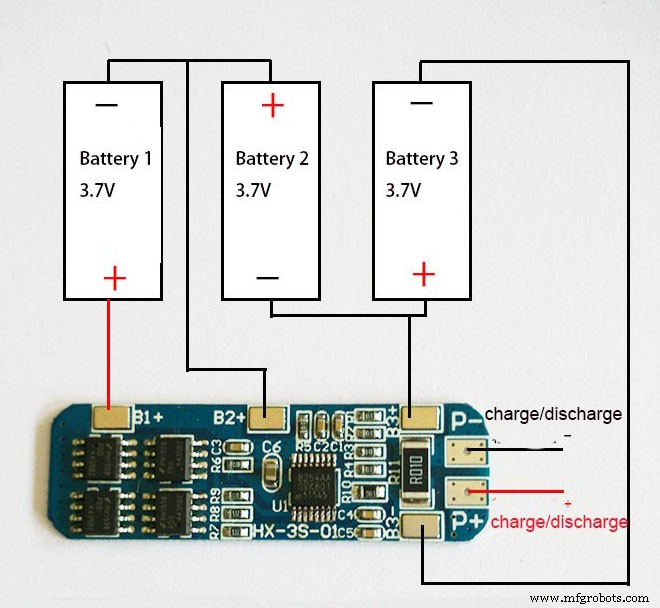
P +とP-は、送信機の電源入力とFPV画面の電源入力に接続されています。 12Vスイッチモード電源(SMPS)には、限られた範囲内で出力電圧を調整するためのポテンショメータが付属しています。 12.8に設定し、電圧出力をBMSのP +とP-に接続します。これは、SMPSが接続されているときにバッテリーパックを充電するのに役立ちます。
好みに応じて、このためのエンクロージャーを設計できます。
コーディング
コードの最初のタスクは、RCチャネル入力を読み取ることです。 PWMレシーバーを使用しているため、割り込みを使用してPWM値を読み取りました。簡単にするために、接続されたピンを次のように定義することにより、割り込みを使用するPWMライブラリを含めました。
PWM ch1(18); //入力用にピン18を設定します
PWM ch2(19); //入力用にピン19を設定します
PWM ch3(20); //入力用にピン20を設定します
PWM ch4(21); //入力用にピン21を設定 起動シーケンスでは、コードはバッテリー電圧とUVスイッチがオンになっているかどうかをチェックします。いずれかを検出すると、起動手順はすべてが修正されるまでそこで待機します。
//バッテリー電圧を確認
battery_voltage_monitor();
while(batterylow ==true){
battery_voltage_monitor();
low_battery_notification();
}
// uvswtichがオフになっていることを確認します
rc_read();
while(uv_pwm> switch_on_pwm){
rc_read();
uv_on_warning_at_startup(); //ブザー音
} モーターを動かすとき、バッテリー電圧はその瞬間だけ臨界的に低下します。ロボットを動かすたびに低電圧アラームがトリガーされるのを防ぐため、バッテリー監視部分はロボットが動いていないときにのみ動作します。
if(robot_moving ==false){
battery_voltage_monitor(); //ロボットが動いていないときにバッテリーを監視します
} モータードライバーの制御、ブザーによる音の生成、リレーの制御など、他のすべての機能は通常の方法で機能します。上記のトピックに気付いていない場合は、一般的なチュートリアルに従うことができます。
操作手順
電源投入手順
GCSコントローラー
1.メインスイッチをオンにします。
2.ロボットアーミングスイッチとUVライトスイッチの両方がオフになっていることを確認します。 (下の位置で)。
ロボット
1.電源スイッチをオンにします。
2.スタートトーンを待ちます。
3.システムの正常なトーンを待ちます。
ロボットの制御
1.ロボットアーミングスイッチをオンにします。
2.ジョイスティックを動かしてロボットを動かします。
3. UVスイッチをオンにして、UVライトをオンにします。ロボットアーミングスイッチがオフの位置にある場合、UVスイッチは機能しません。
バッテリーレベルインジケーター
1.ロボットを操作するために、バッテリーに少なくとも4本のバーが点滅していることを確認します。
2.バッテリー残量が少なくなると、ブザーが鳴り、バッテリーレベルインジケーターの最後の2本のバーが点滅します。
課金手順
1.ロボットの電源を切ります。
2.GCSをオフにします。
3.インバーターをパワーポイントに接続します。 (通常、インバーターには充電レベルインジケーターが組み込まれています)
一般的な考慮事項
1。混雑した場所での使用
紫外線は人の目や皮膚に有害です。短距離(3m未満)で60秒以上光にさらすと、目を傷つけ、皮膚に刺激を与える可能性があります。ただし、紫外線ビームは固体媒体を透過できません。透明なガラス越しに紫外線を見ても、人間の目や体には影響しません。
2。敏感な材料とデバイス
軟質プラスチックは紫外線に非常に敏感です。軟質プラスチックは、おもちゃや食品包装によく使用されます。そのため、おもちゃ屋さんやスーパーマーケットなど、上記の商品が販売されている場所ではご利用いただけません。ただし、UVライトは、前述の領域の床を消毒するために使用できます。
3。病院で使用する能力
病院環境では、UV光は非常に短時間でハイタッチ面を消毒するのに役立ちます。ただし、このシナリオでは、医療機器や医薬品に対するUV光の有効性を考慮する必要があります。
プラスチック製の筐体を備えた医療機器は、製造プロセス中に放射線治療を受けるため、硬質プラスチックで作られています。さらに、病院に保管されている薬に対する紫外線の有効性については、証明された効果はありません。
さらに、すべてのステンレス鋼の医療機器とN95マスクは、同じデバイスを使用して滅菌できます。
4。影付きの領域の有効性
紫外線は可視光線と同じように表面から反射します。したがって、直接紫外線を受け取らない領域は、反射紫外線を受け取ります。ただし、重く覆われた領域や日陰の領域では、効果的なUV光が得られません。これらの領域は、消毒液ベースの方法でも消毒されません。
5。その他の考慮事項
密閉された環境で長時間作業すると、UV光がオゾンを生成します。一般的な慣行として、すべての密閉された環境は、UVライトで滅菌された後20分間換気されます。
コード
ArduinoMegaのコード
https://github.com/tharindusuraj/Ultraviolet-Germicidal-Robot 回路図
uv-x_Q9R5T59Q32.fzz 製造プロセス