


MeArmロボットアーム-あなたのロボット-V1.0
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
このプロジェクトについて
<図>
 <図>
<図>  <図>
<図>  <図>
<図> 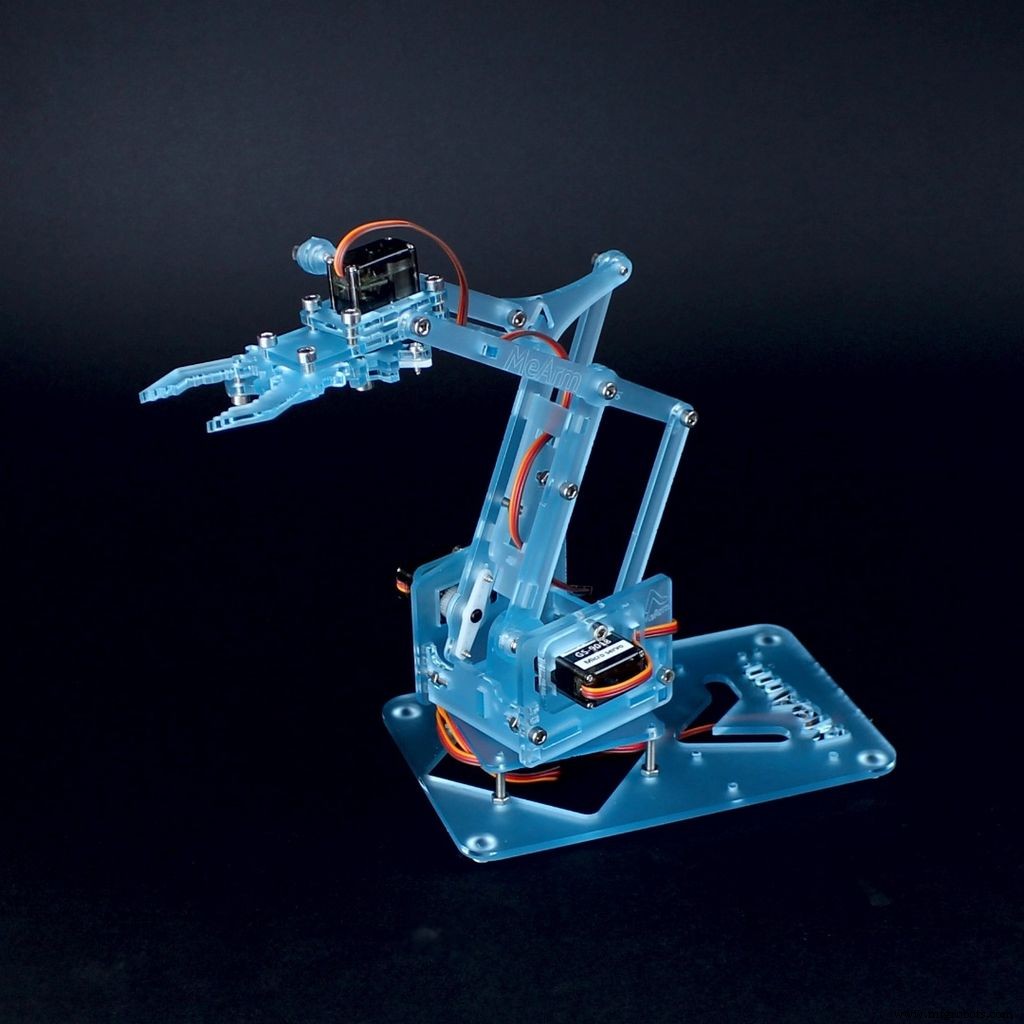 <図>
<図> 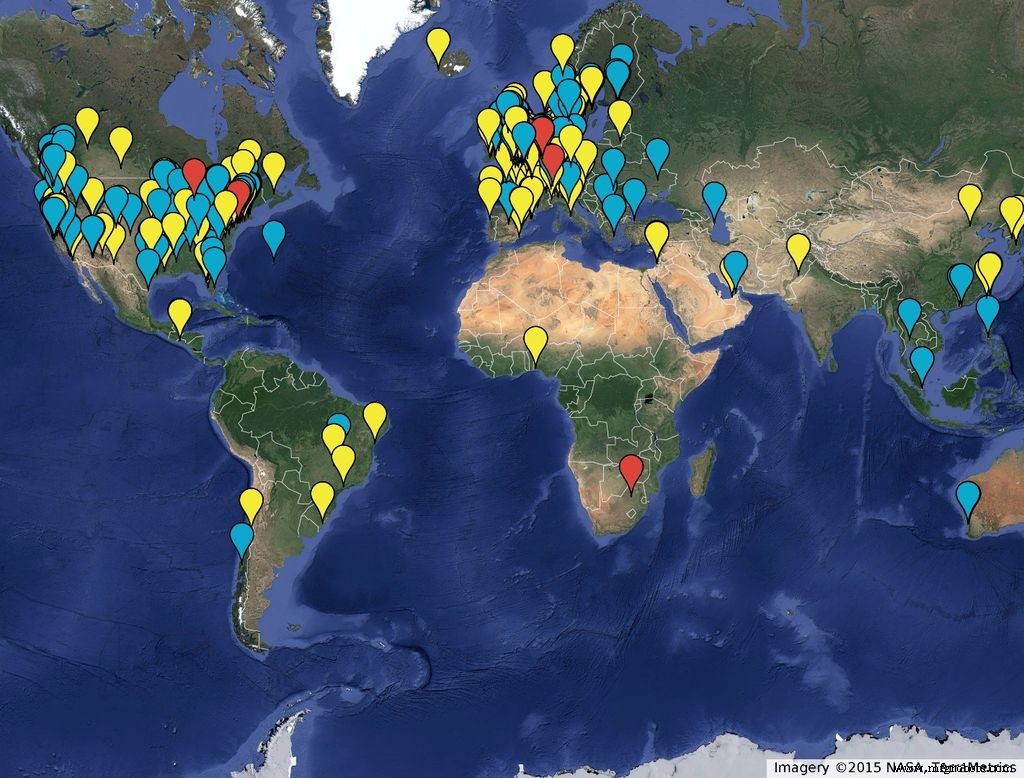 <図>
<図> 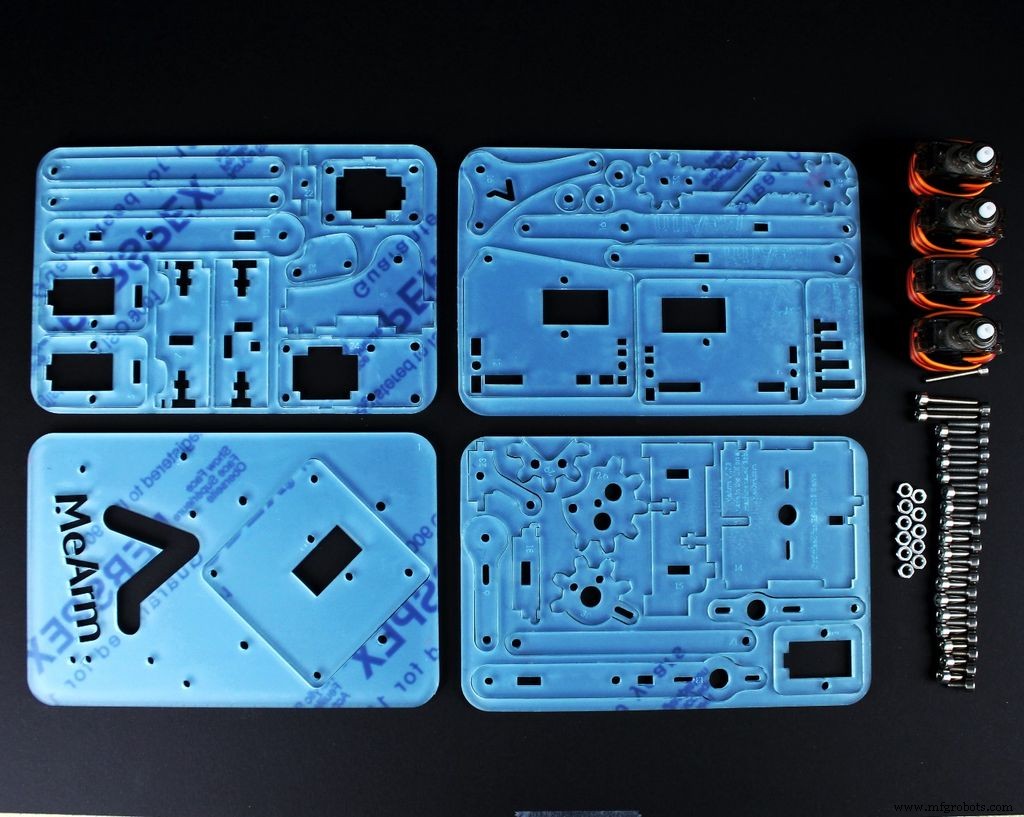
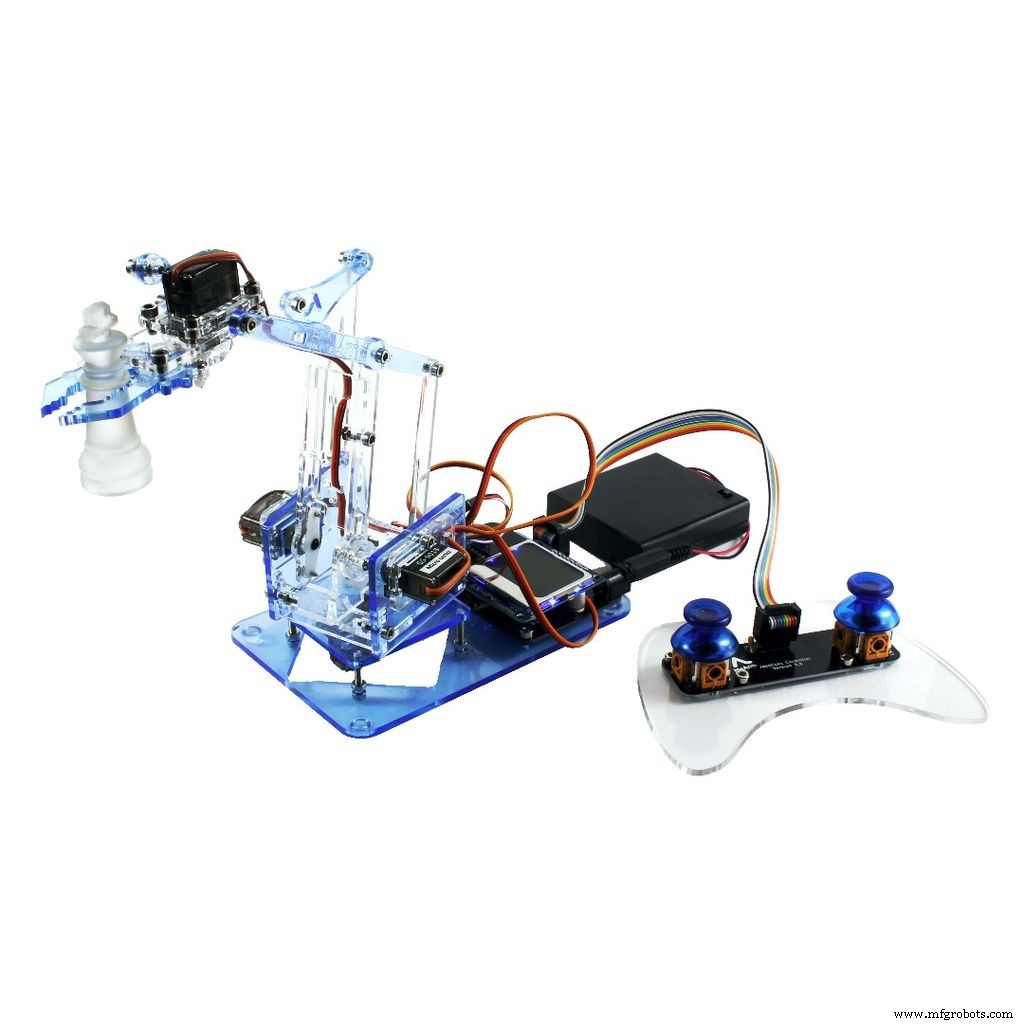
これは、MeArmロボットアームのビルド手順の最新バージョンです。 MeArmは、2014年4月にロボットコンテストで2位を獲得したときに、最初にInstructablesに登場しました。それ以来、世界中で約10,000台が製造されています。地図にはほんの一握りしか表示されていませんが、Instructablesの助けを借りて、世界初のバイラルロボットになったことを本当に誇りに思っています!
これらの手順をまとめて、リソースページの手順を補完します。
ステップ1:ファイルを取得し、レイザーを起動します! <図>
 <図>
<図> 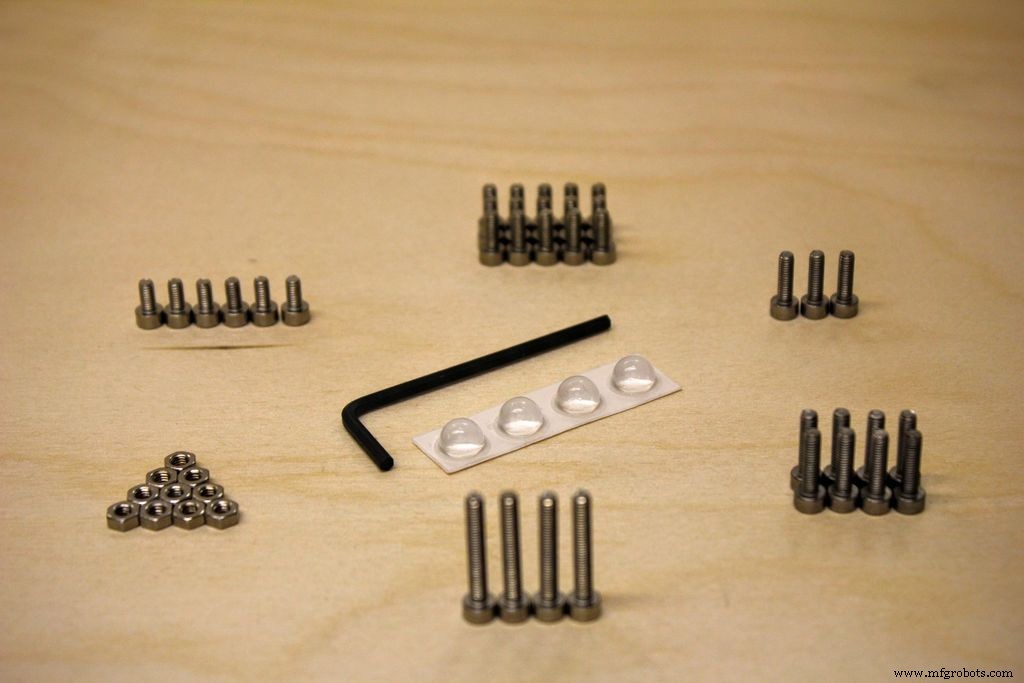 <図>
<図> 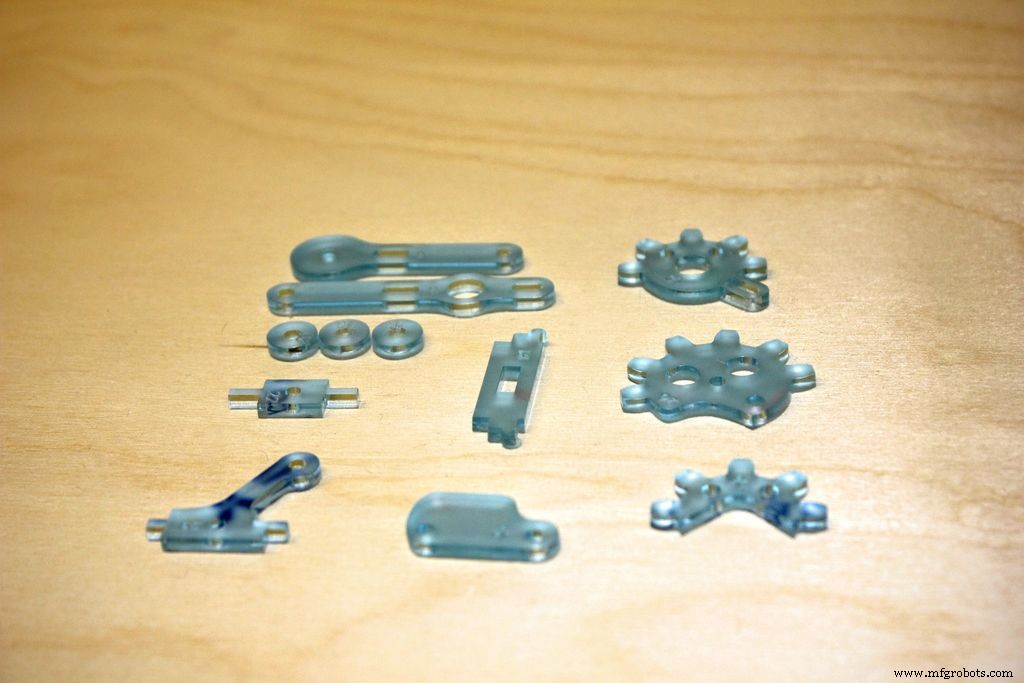
MeArmは今もなお、ほとんど常にオープンソースハードウェアです。だから、thingiverseで私たちのファイルをつかむことができます。これは.dxfファイルであるため、ほとんどのレーザーカッターで機能するはずです。また、パーツの周囲にボックスを配置して、正しいサイズに設定できるようにしています。私たちは3mmのアクリルを使用していますが、デザインはかなり耐性があり、木で作られ、3Dプリントされているのを見てきました。
たくさんのネジも必要です。現在のロードアウトには以下が必要です:
ナット×11
6mm x 7
8mm x 15
10mm x 5
12mm x 8
20mm x 4
すべてのM3サイズ、それはメートル法3mmです。私が理解していることは、州で見つけるのは難しいかもしれませんが、月に着いたら、適切な代替案を見つけることができます!
ステップ2:ちょっと待って!調整しましょう! <図>
 <図>
<図> 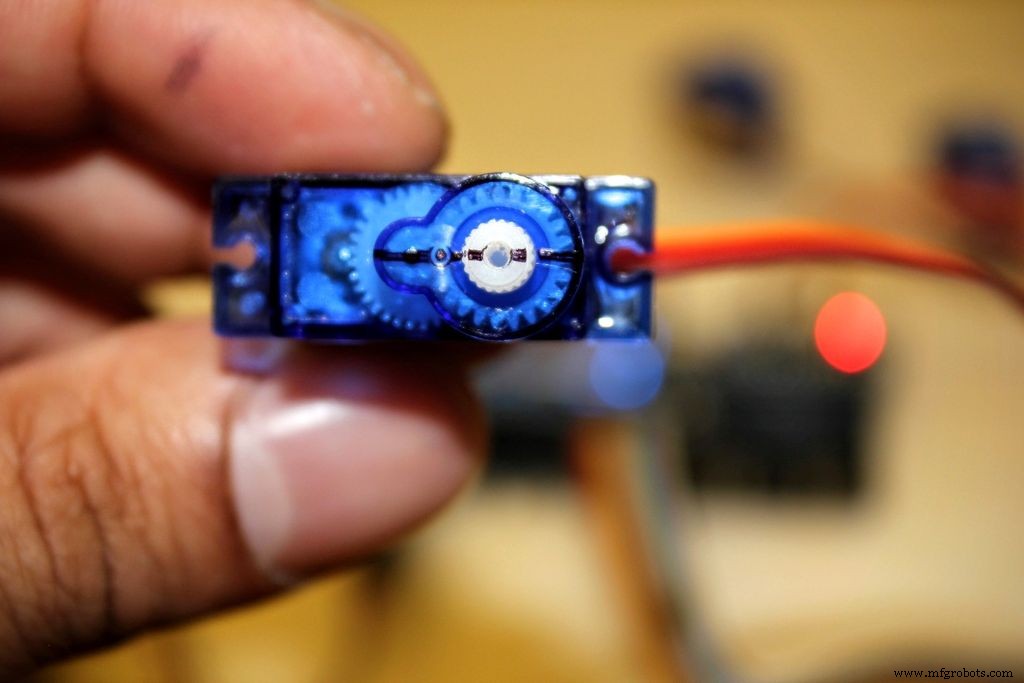 <図>
<図>  <図>
<図> 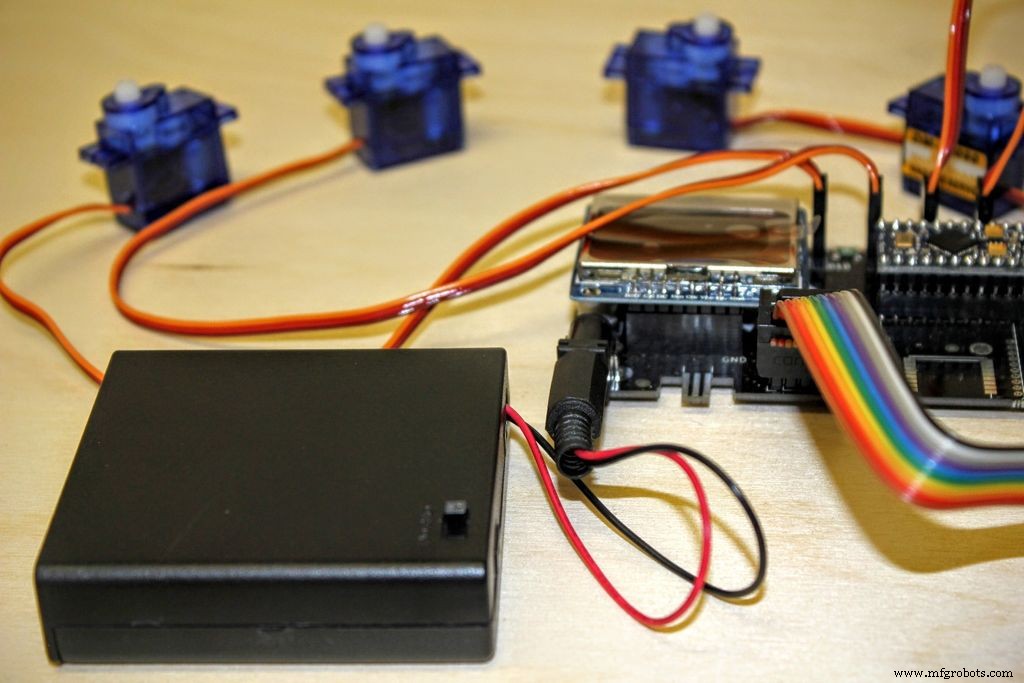 <図>
<図>  <図>
<図> 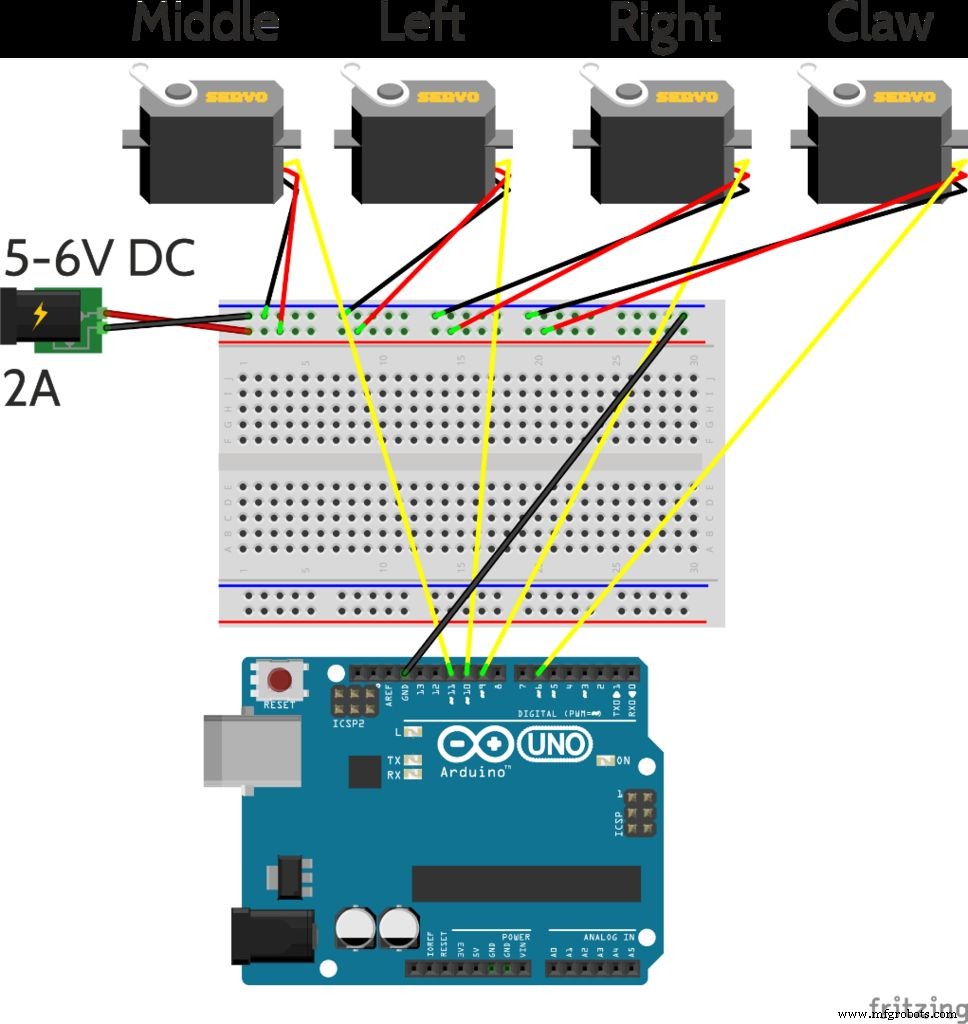
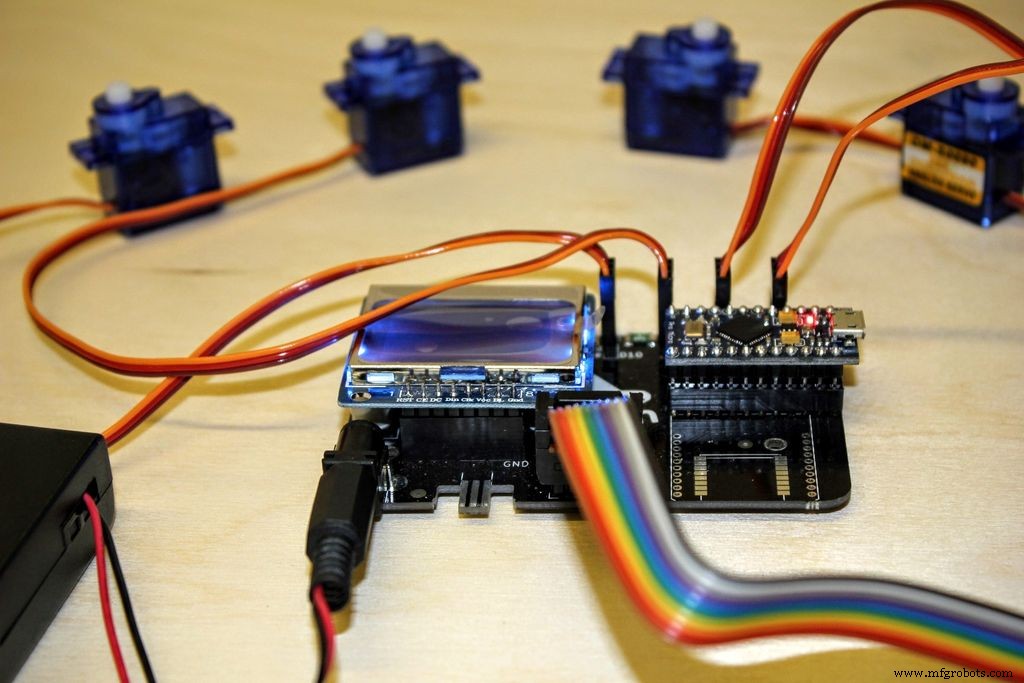
パーツをレーザーカットしたり、キットを購入したりした場合は、実際にそれを構築したいと思うでしょう。ただし、最初に重要なステップを完了する必要があります。サーボを校正する必要があります。ここでは、Arduino互換のBrains Boardを使用しますが、PWM信号を生成するものなら何でも使用してキャリブレーションできます。 Arduino、Raspberry Pi、Beaglebone Black、Sparkcore、Espruinoで利用できるMeArmコードがあります。
Brains Boardを使用すると、デフォルトの位置に移動するようにプログラムされます。センター、レフト、ライト、クローのサーボはそれぞれ90、90、90、25です。サーボのスピンドルとボディに中心線をマークします。また、c、l、r、c、または何か意味のある別のシステムでマークすることもできます。
手で回そうとしないでください。強力な力によって提供されるトルクによってサーボギアが剥がれる可能性があります。同じ理由で、MeArmを構築する前にこのプロセスを実行することが非常に重要です。
とArduinoを使用している場合は、上の画像に示されているセットアップとこのコードで同じ結果が得られます。デモコードにはCodebenderを使用しており、Tシャツが大好きです。したがって、アカウントを開設する場合は、このリンクを使用してください。
サーボをセットアップする際に理解する最も重要な部分は、マイクロコントローラーを介してサーボに電力を供給することができないということです。マイクロコントローラーへの共通接地を備えた、別個の5-6V2A電源装置が必要です。詳細については、Arduinoのセットアップ画像を確認してください。
ステップ3:行こう! <図>
 <図>
<図> 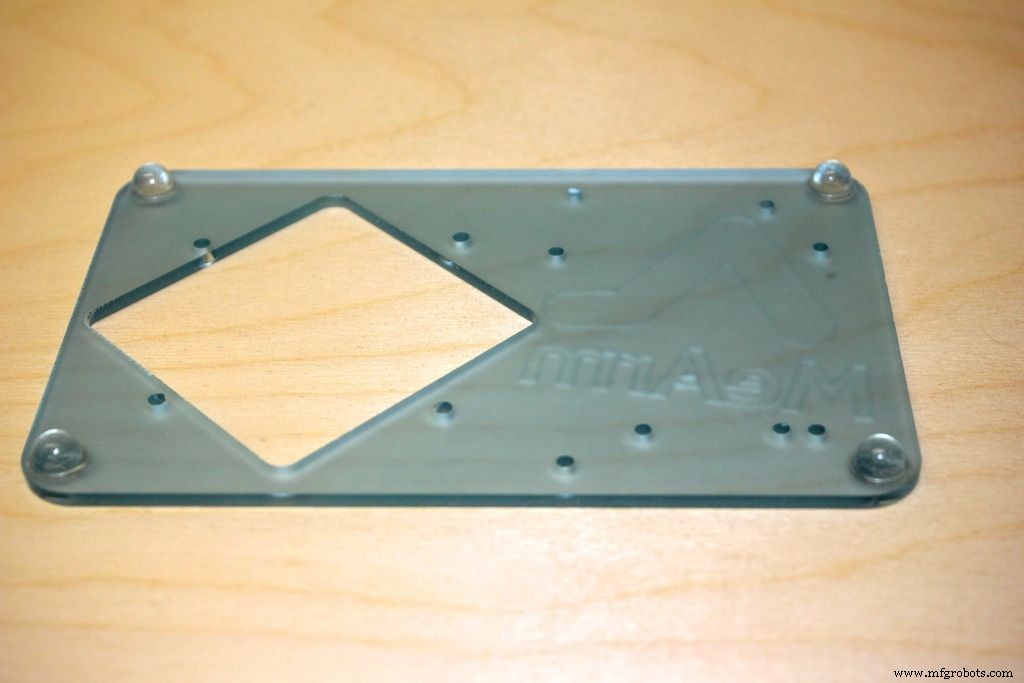 <図>
<図> 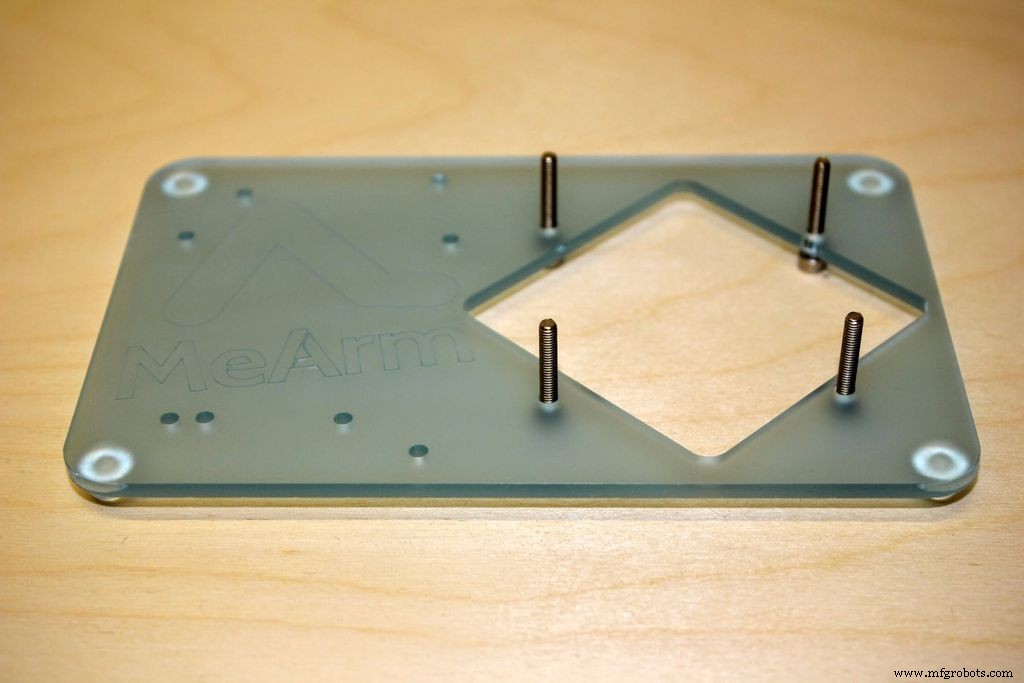 <図>
<図> 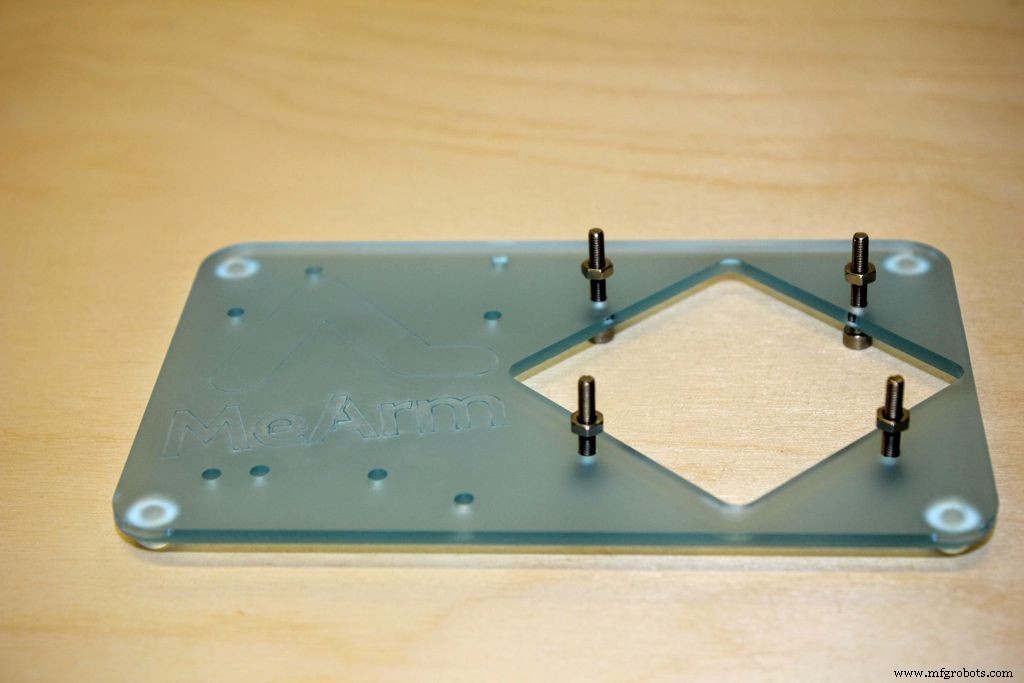 <図>
<図> 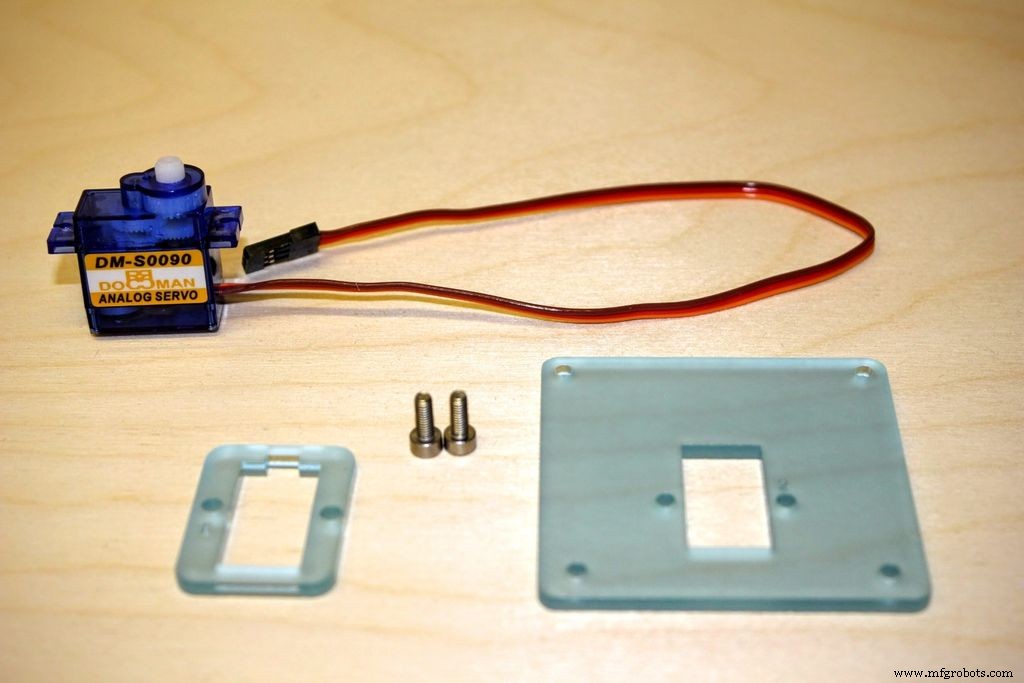 <図>
<図> 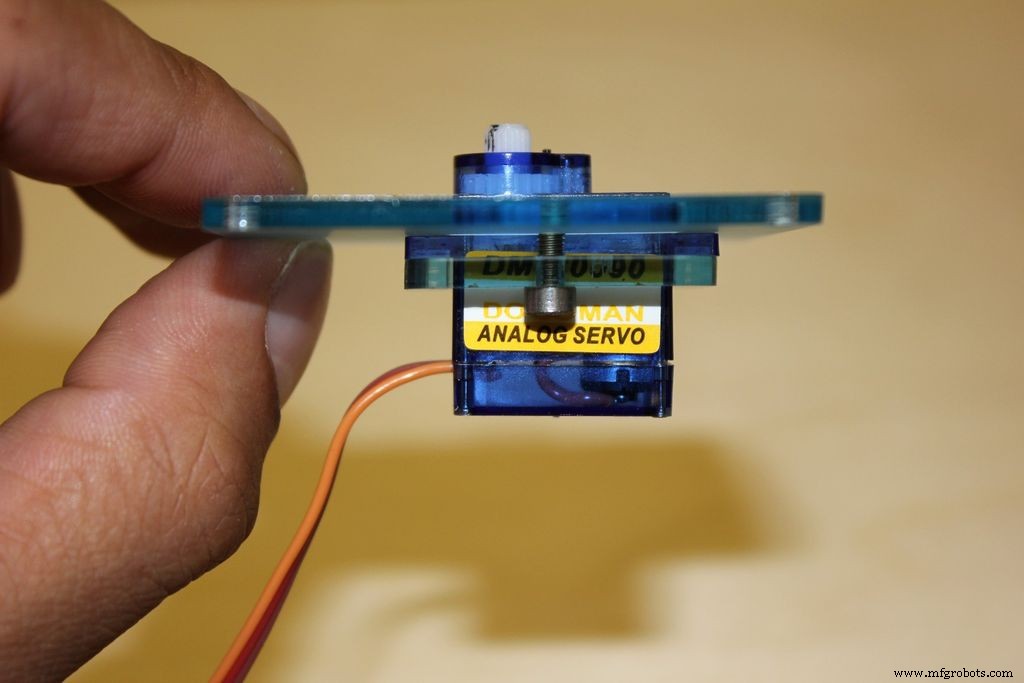 <図>
<図> 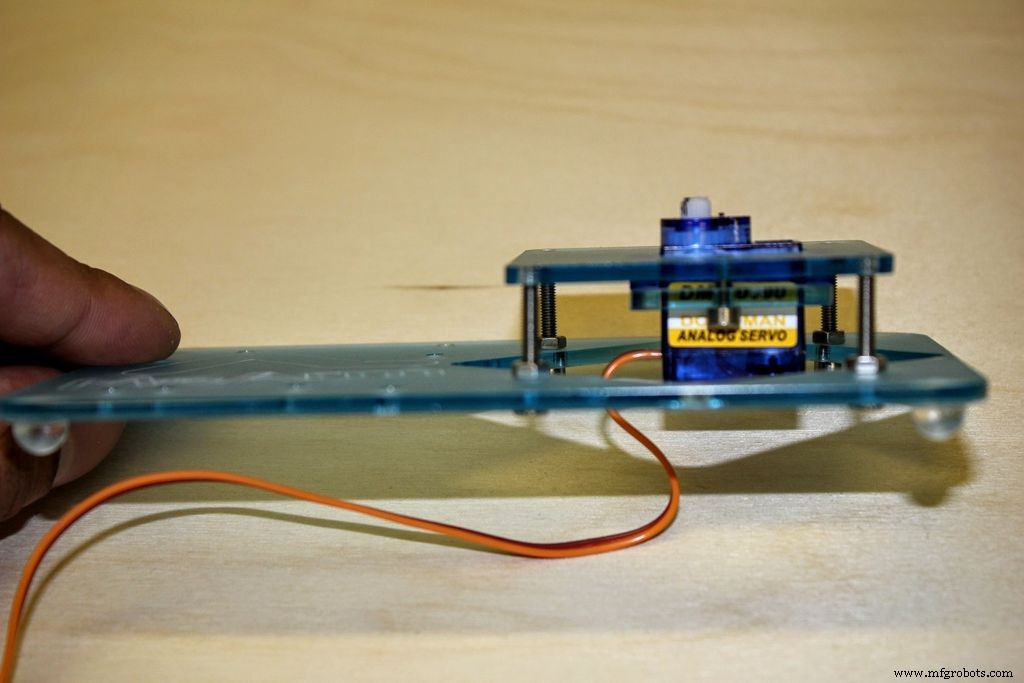 <図>
<図> 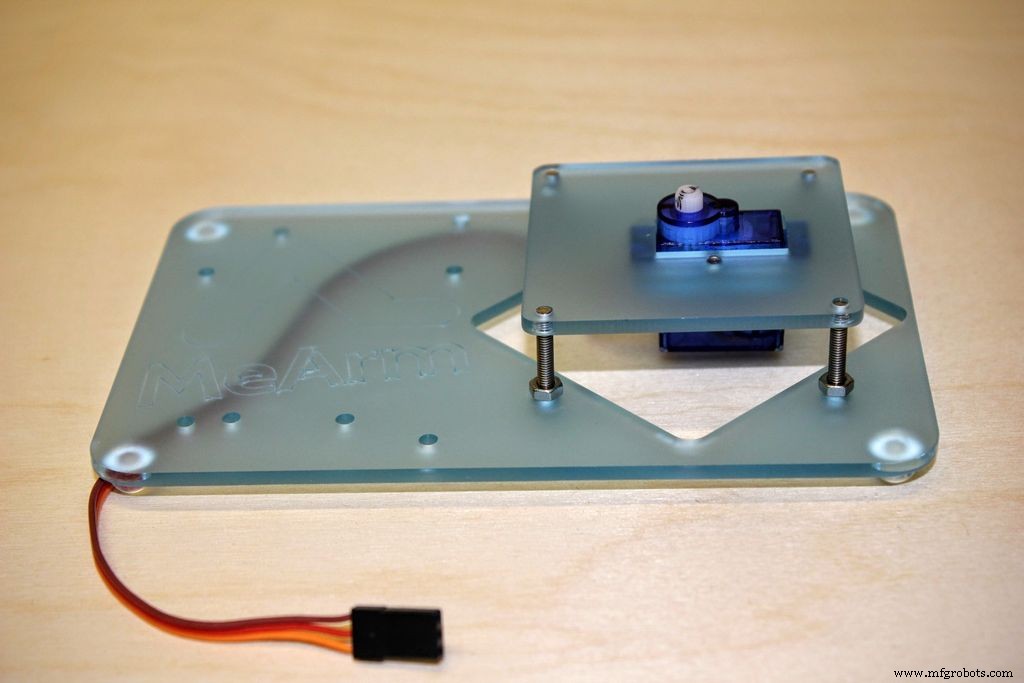
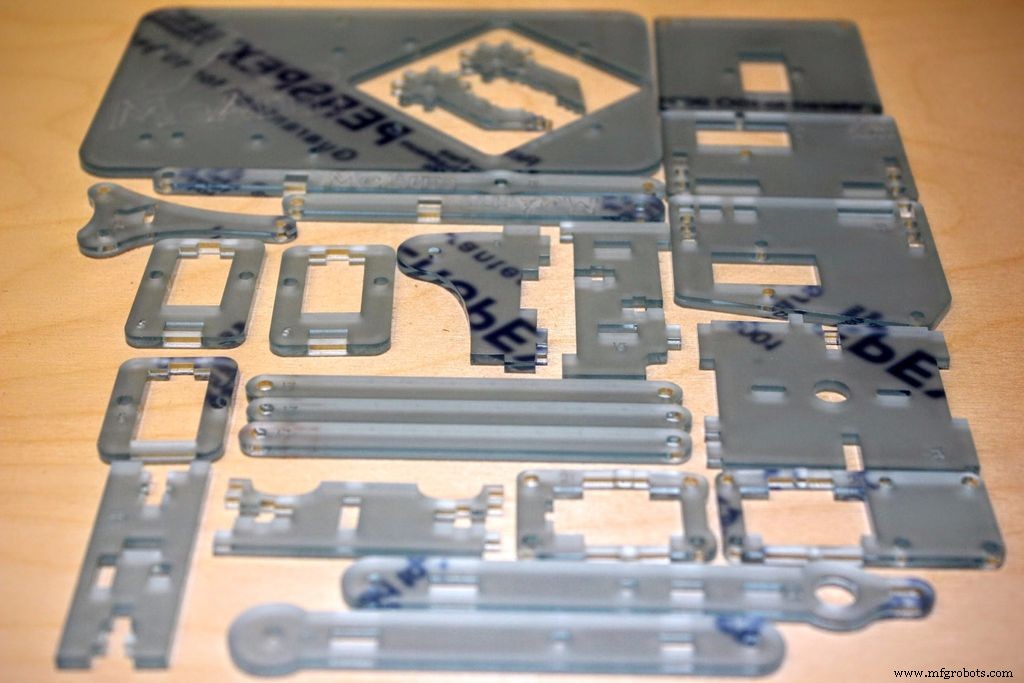
サーボを校正すると、ひびが入る可能性があります。文字通り、スナップアウトパックをお持ちの場合は!
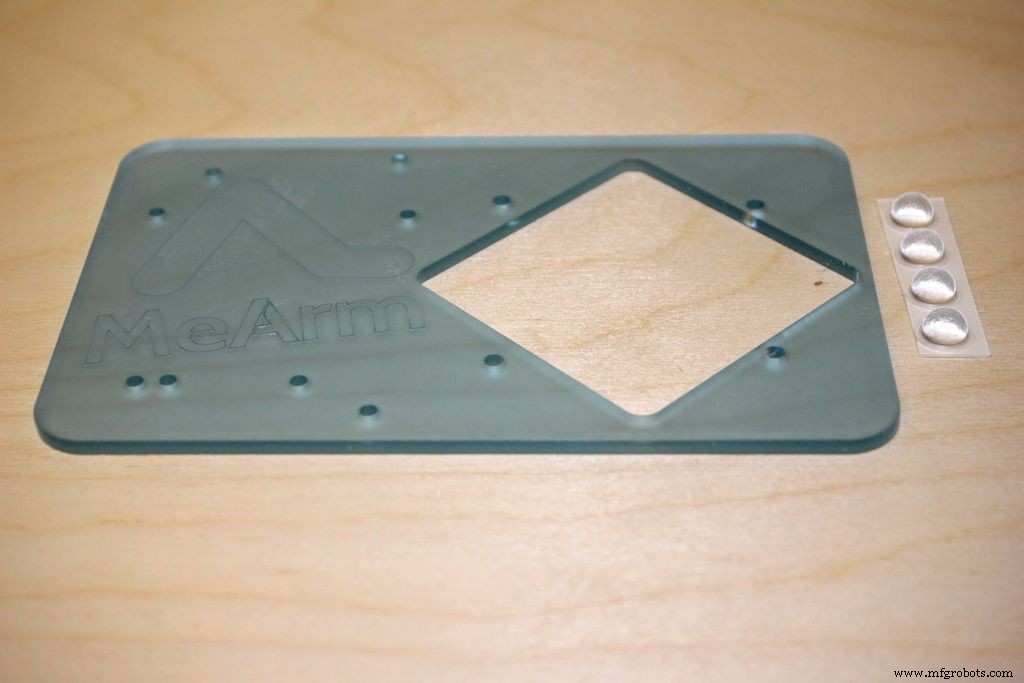
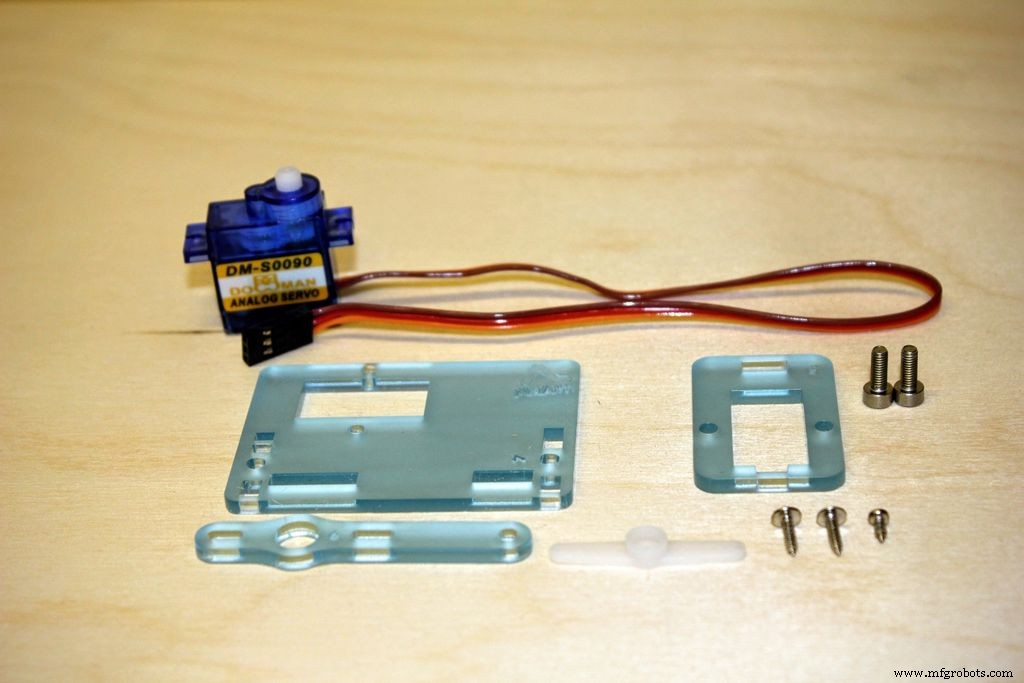
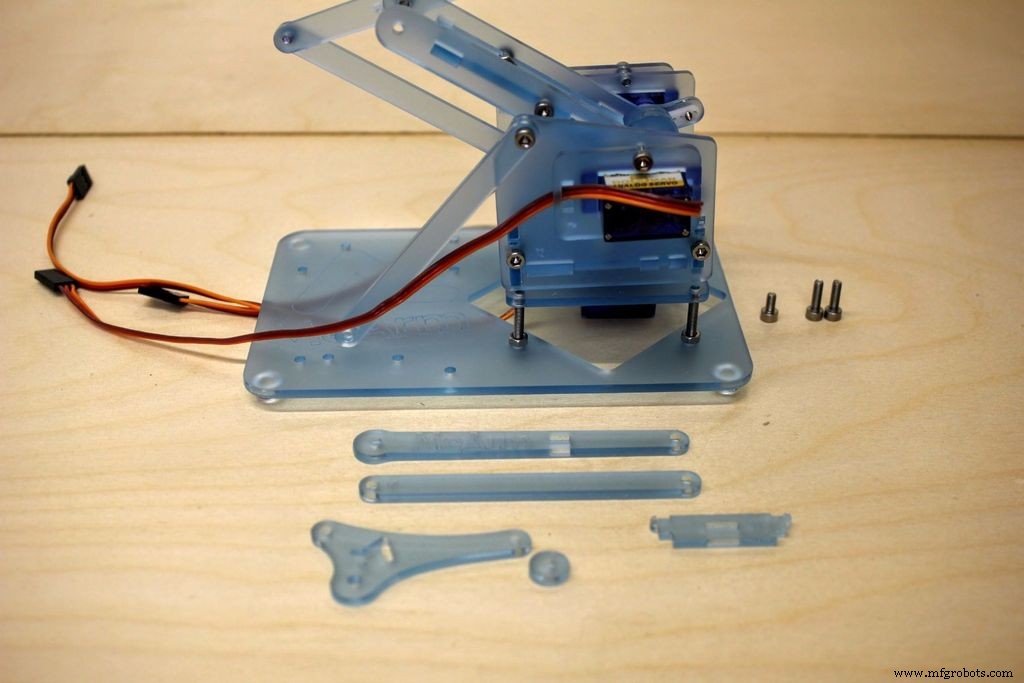
あなたはおそらくアクリル片の保護裏地を外すのに少し時間を費やさなければならないでしょう。あなたはあなたが行くようにそれをするか、一度にそれをすることができます。お電話。
最大の部分(#1)を見つけて、粘着パッドの脚をその角に取り付けます。次に、下側から4本の20mmネジを挿入し、4本のナットを半分までねじ込みます。次に、パーツ#2、#3、センターサーボ、および2本の8mmネジを見つけます。サーボをパーツ#3に通します。これをカラーと呼びます。ネジをカラーに押し込み、パーツ#2にネジで固定します。
ネジはパーツ#2にセルフタップします。これは、ネジが独自のネジ山を切ることを意味します。 MeArmには、2つの穴のサイズがあります。1つはネジを押し込むことができる約3mmで、もう1つはネジをセルフタップする約2.6mmです。これは、JooのすばらしいPlotClockから借りた方法です。
次に、サーボ/カラーアセンブリを20mmネジでパーツ#1に取り付けます。これらはセルフタップし、パーツの穴の向きは、間違った方向に回らないようにする必要があります。これはポカヨケと呼ばれ、フールプルーフデザインの方法です。初期のモデルv1.0を使用している場合は、これを正しく行う方法が1/8しかないため、これに対する私の試みは熱心すぎることがわかります(穴を一致させることができない場合は、パーツを裏返します)。それ以降のバージョンは、スコットピアスのアドバイスによって調整され、1/2の方法があります。
ステップ4:左側 <図>
 <図>
<図> 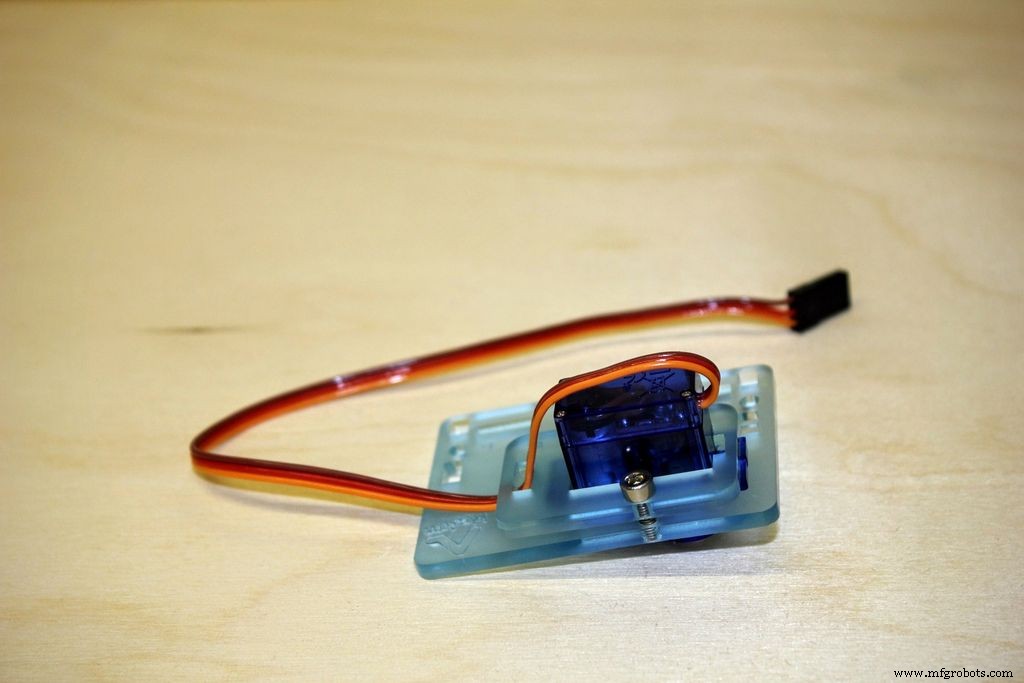 <図>
<図> 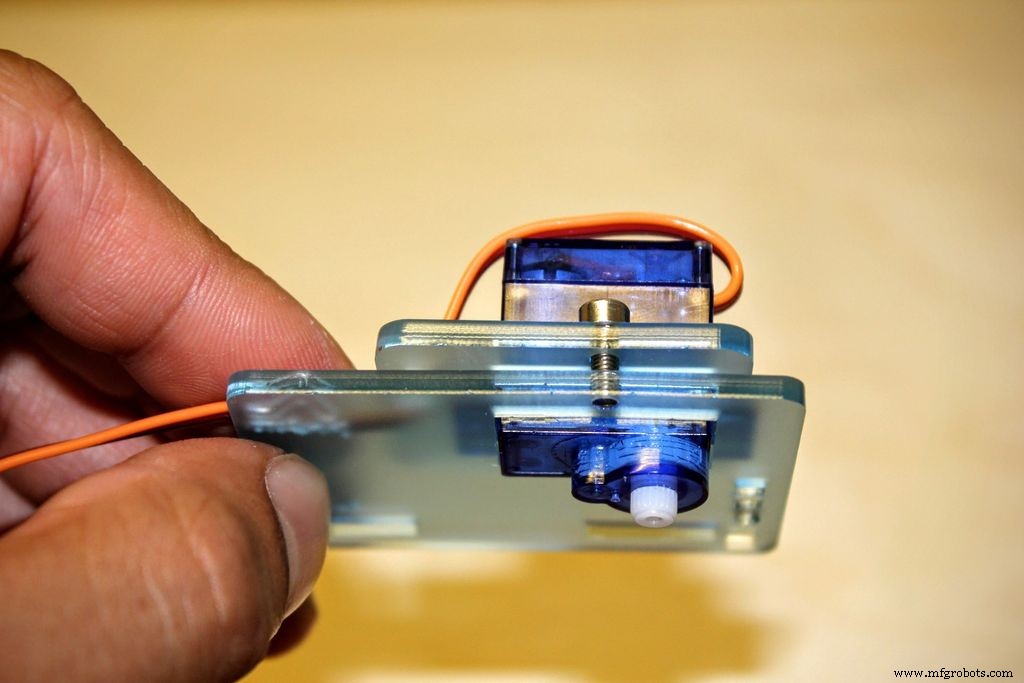 <図>
<図> 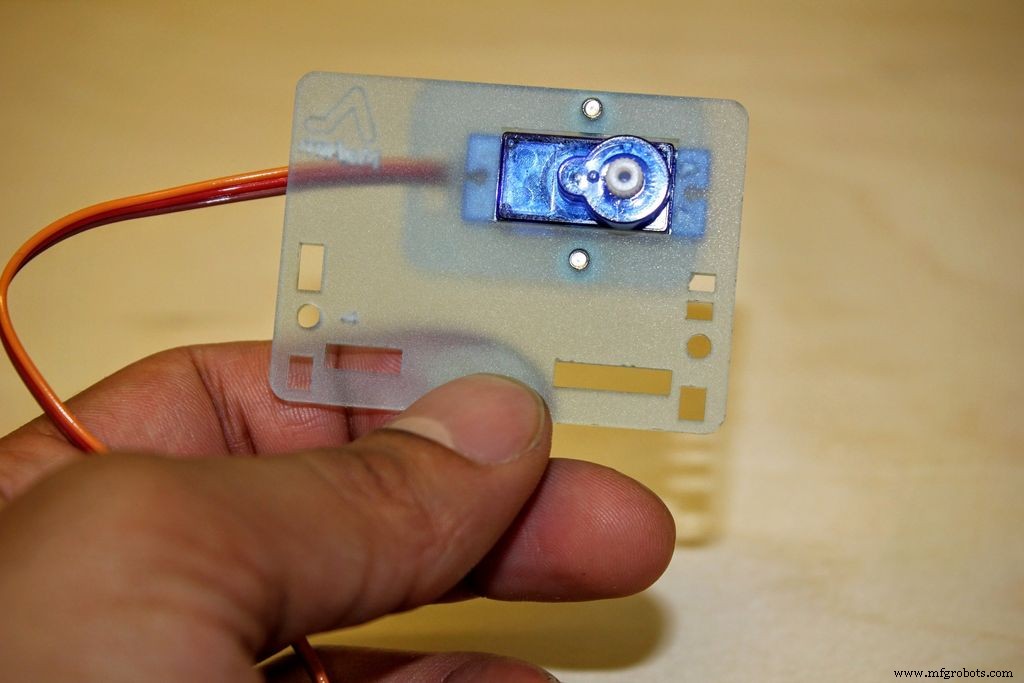 <図>
<図>  <図>
<図> 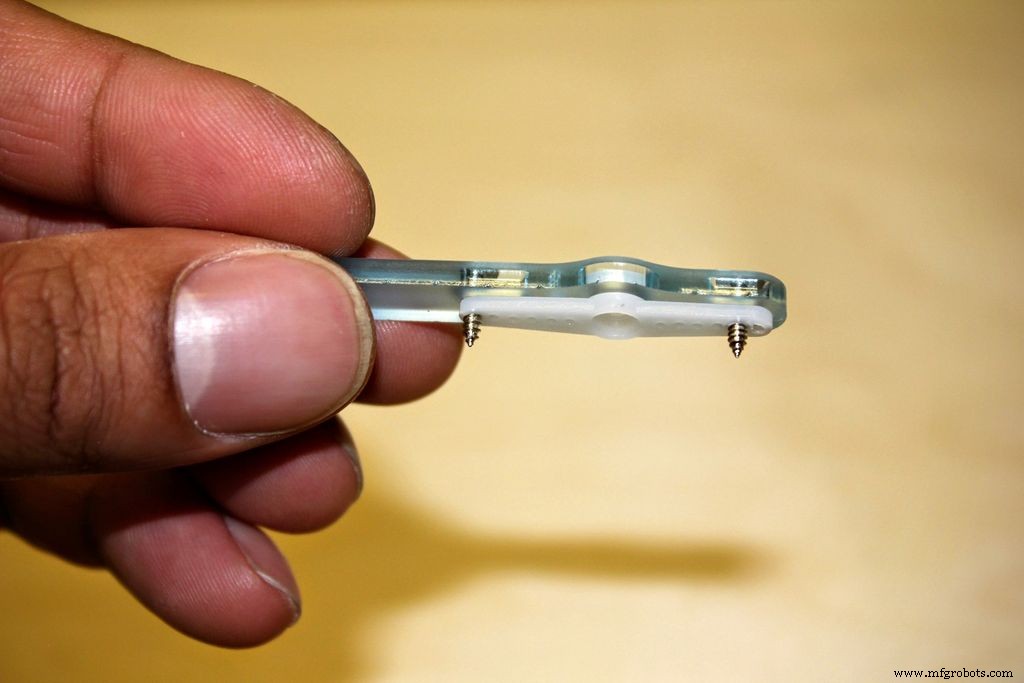 <図>
<図> 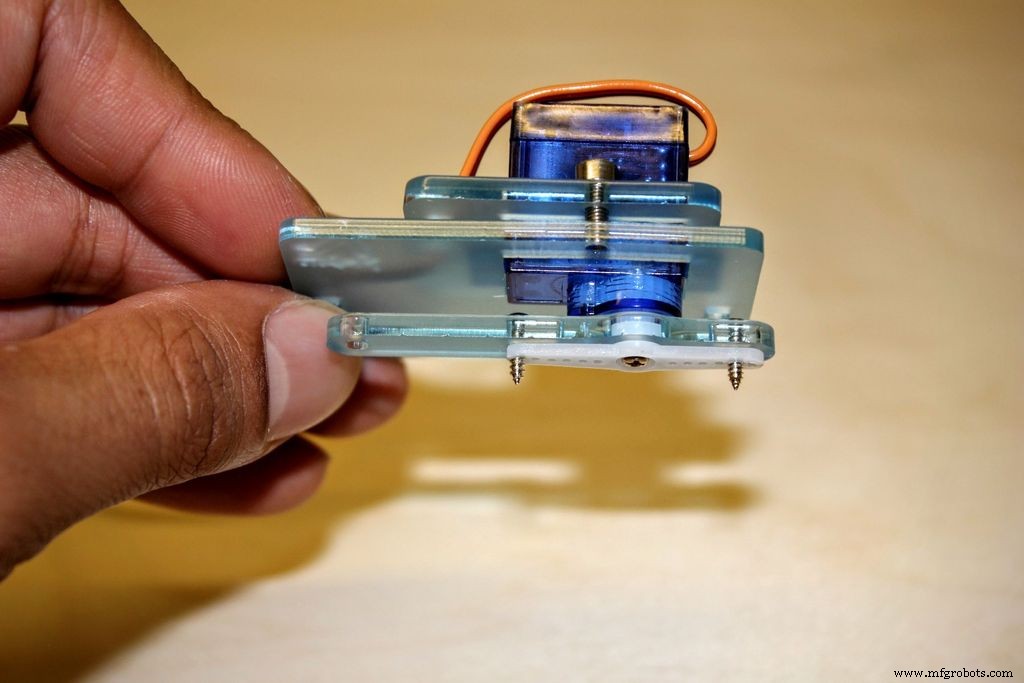 <図>
<図> 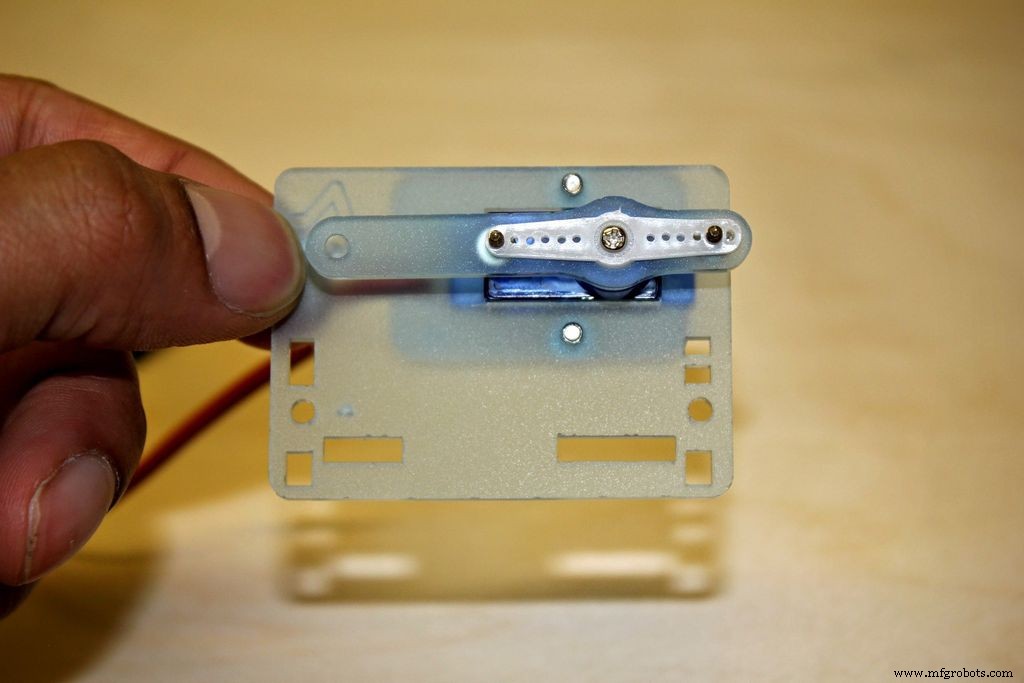
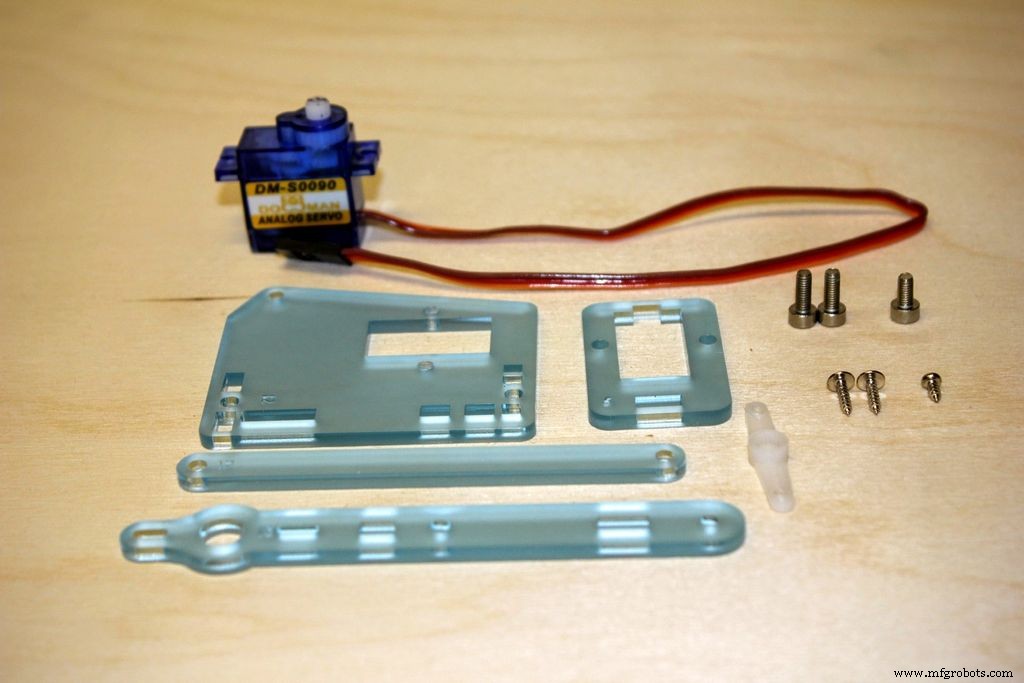
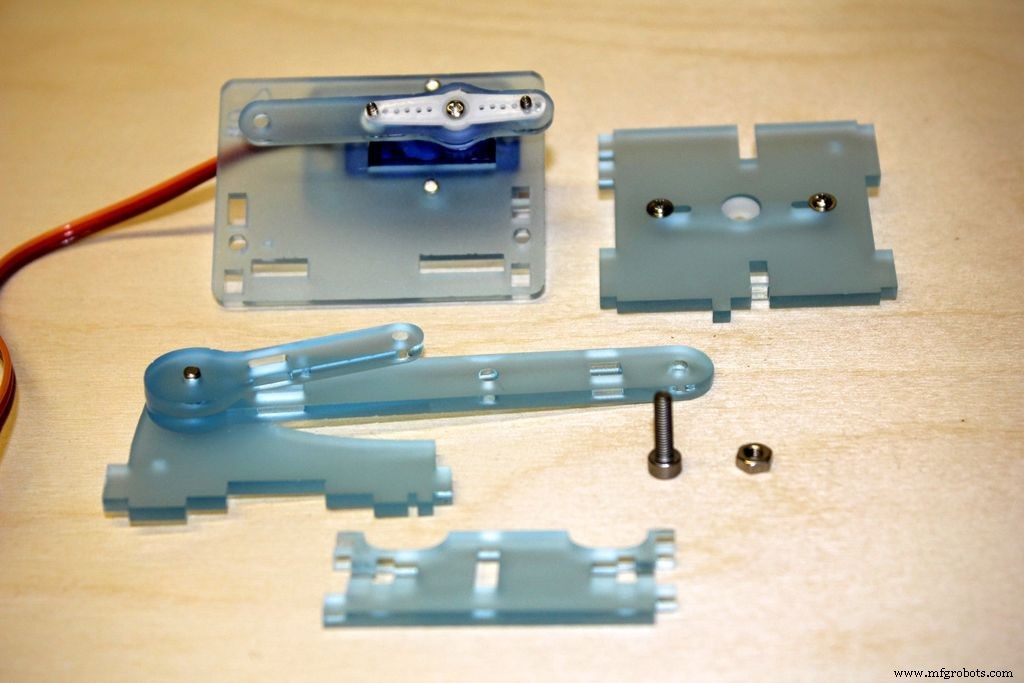
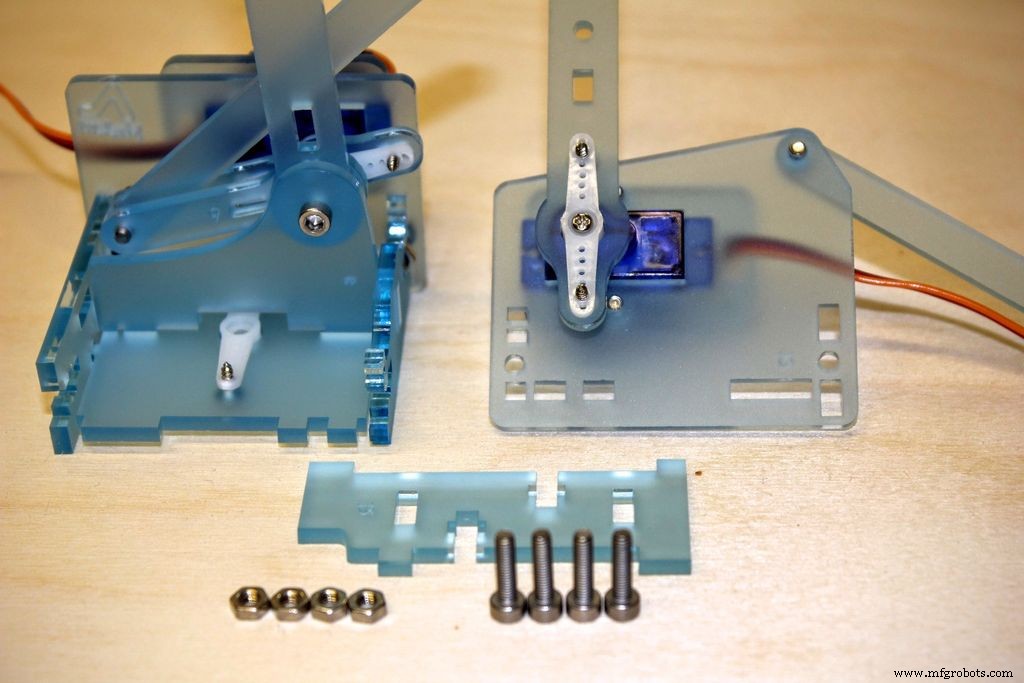
次に、パーツ#4、#5、#6、左側のサーボ、2本の8mmネジ、およびサーボ固定パックを見つけます。
サーボをカラー(パーツ#5)に通し、次にサーボケーブルをケーブルの整頓された穴に通します。 8mmネジを使用してカラーをパーツ#4にネジ止めします締めすぎないように注意してください 。アクリルを曲げたくない場合は、サーボを所定の位置に保持するだけです。
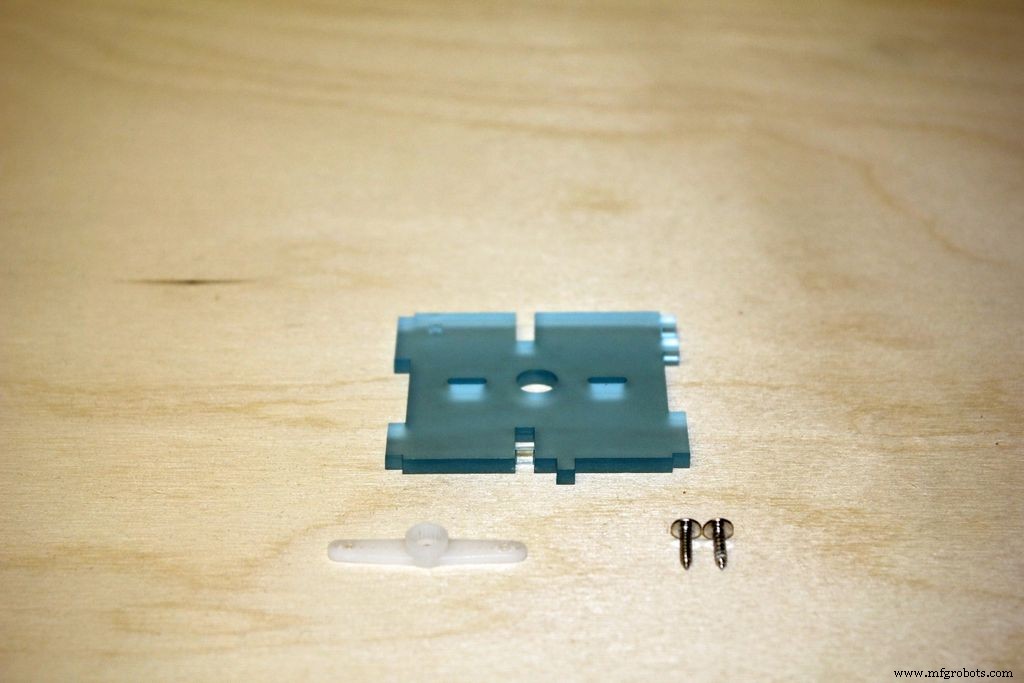
次に、サーボ固定パックの鋭利なネジを使用して、サーボ固定(白いもの、ホーンと呼ばれます)をサーボアーム(#6)に取り付けます。これらは白いプラスチック製のサーボホーンをセルフタップします。少し注意が必要な場合がありますので、ここでは注意してください。あなたが子供と一緒に構築しているなら、これはあなたが参加したいと思う時間通りです。
図のように、サーボ固定具をキャリブレーションされたサーボに取り付けます。これは、パーツ#4の最も長い辺と平行であり、前に描いた線はまだ一致している必要があります。サーボパックの小さな小ネジを使用してサーボに固定しますが、締めすぎないでください!
ステップ5:右側 <図>
 <図>
<図> 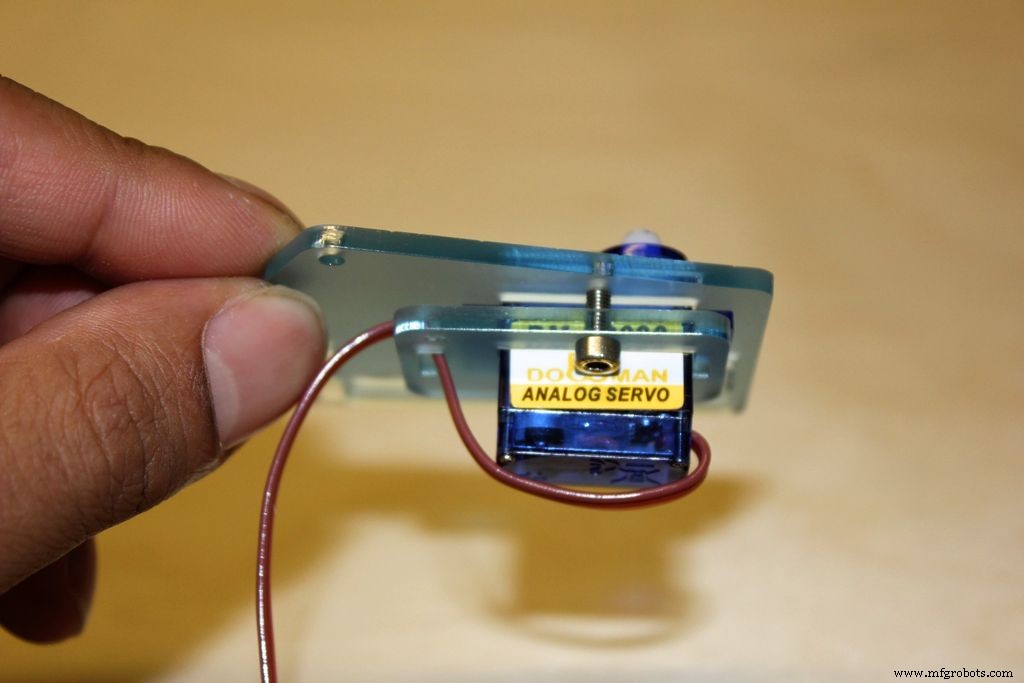 <図>
<図> 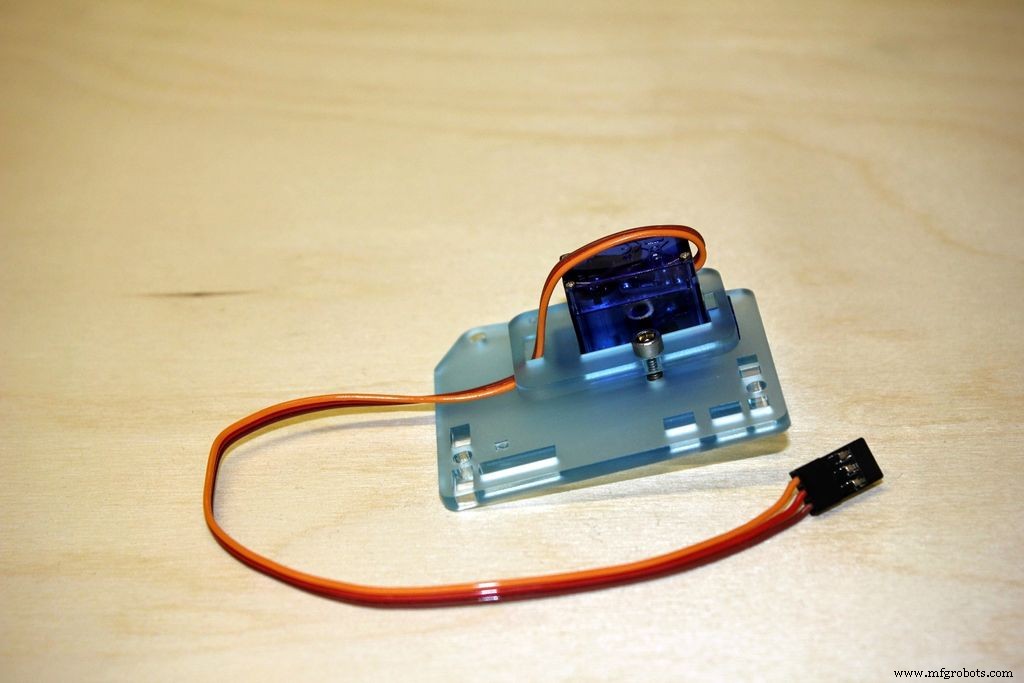 <図>
<図> 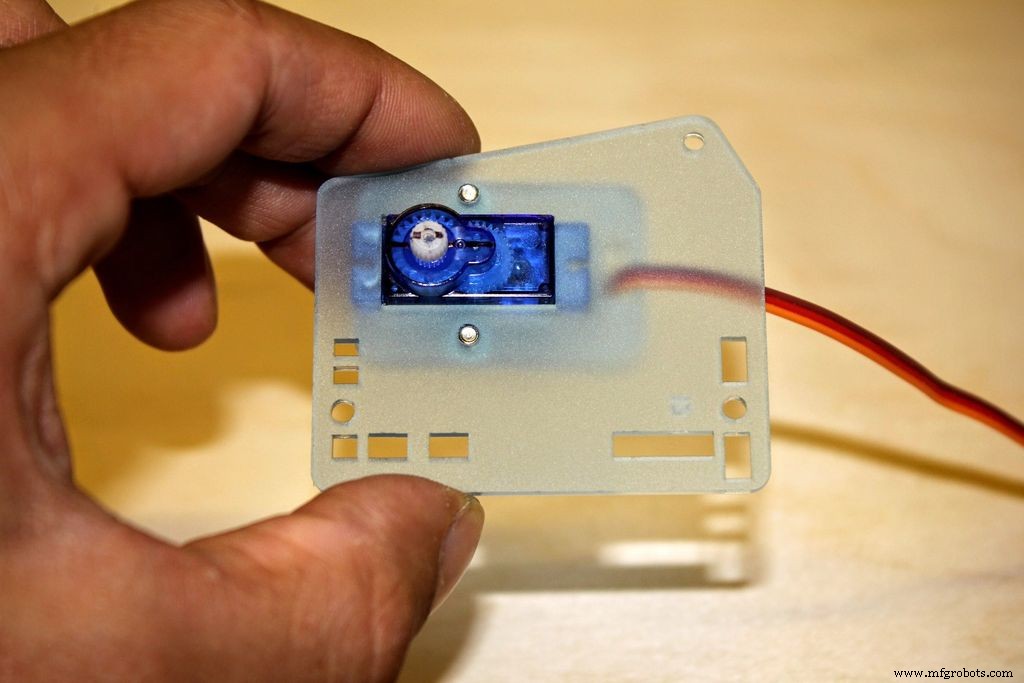 <図>
<図> 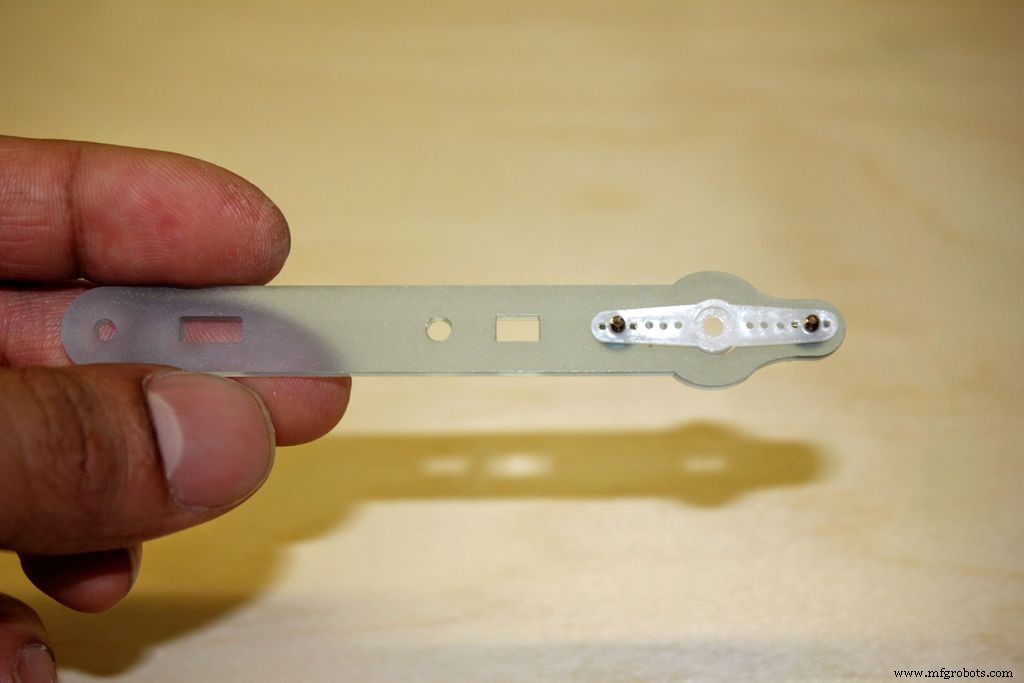 <図>
<図> 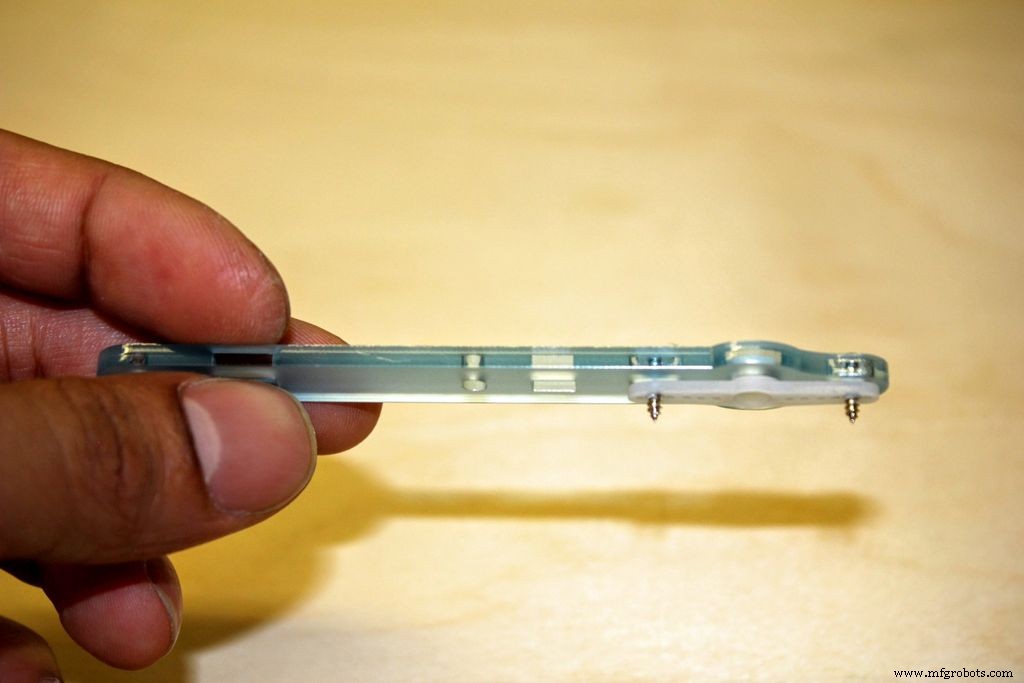 <図>
<図> 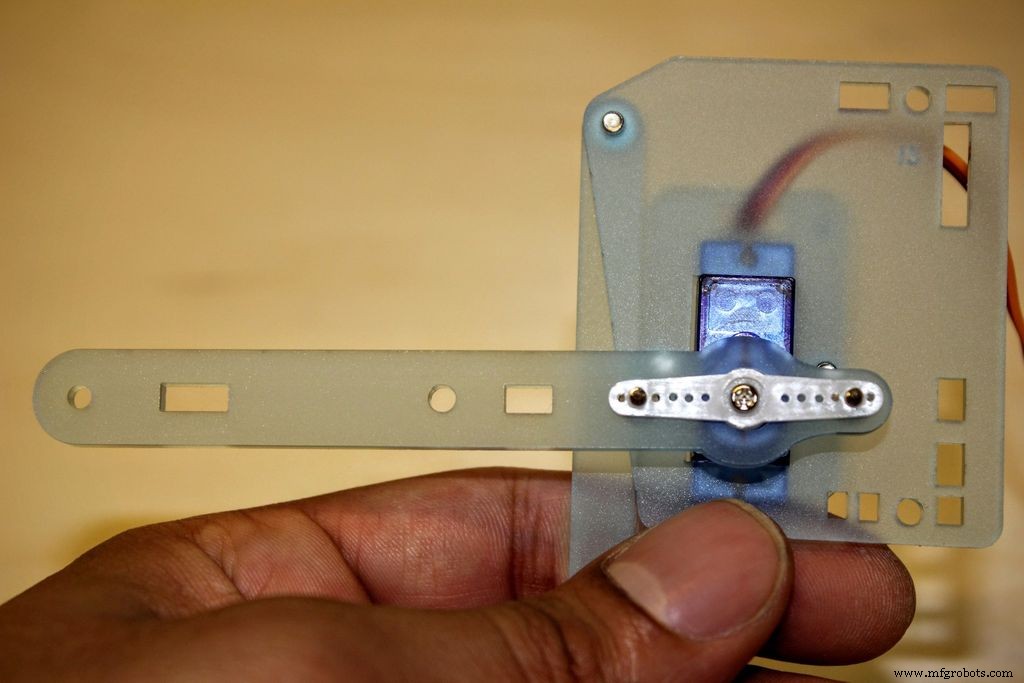 <図>
<図> 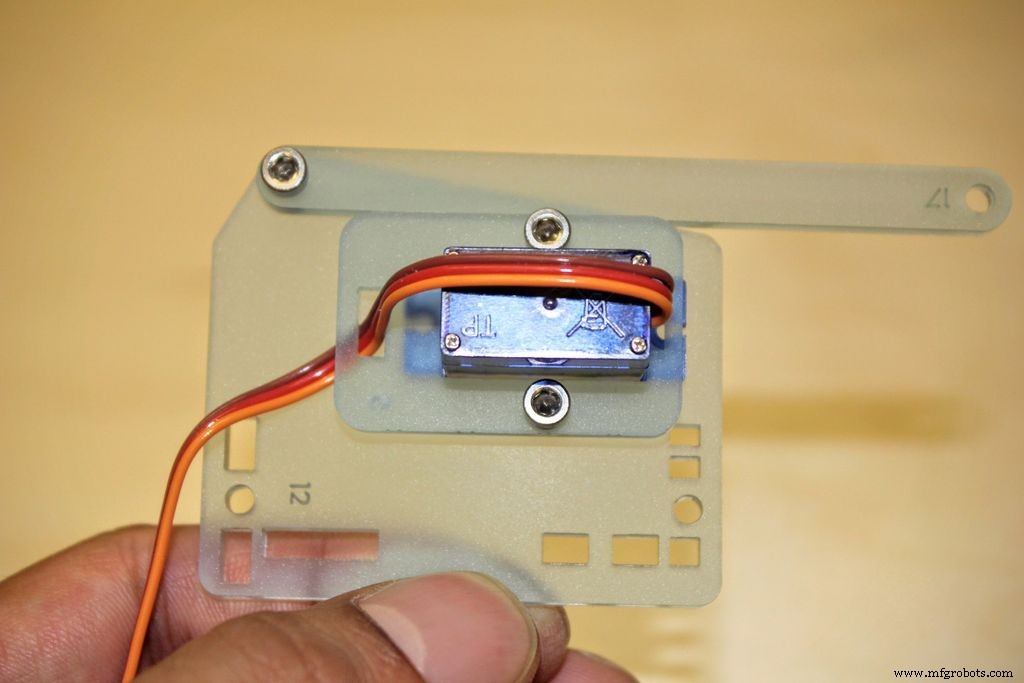
ここで必要なパーツは次のとおりです。
#5、#12、#13、#17、2本の8mmネジ、6mmネジ、右側のサーボ、およびサーボ固定パック。
サーボをカラーに通し、ケーブルをケーブルに通します。前と同じように、8mmネジでサイドプレートに取り付けます。再度、締めすぎてプレートが破損しないように注意してください。前と同じように鋭利なネジを使用して、白いサーボホーンをサーボアーム(#13)に取り付けます。サイドプレートの最も長い側に90度の角度でアームを付けてサーボに取り付けます。ここでも、作成した黒い線が揃うはずです。
最後に、この段階で、6mmネジを使用してパーツ#17をサイドプレートに取り付けます。
ステップ6:ミドルを構築する <図>
 <図>
<図> 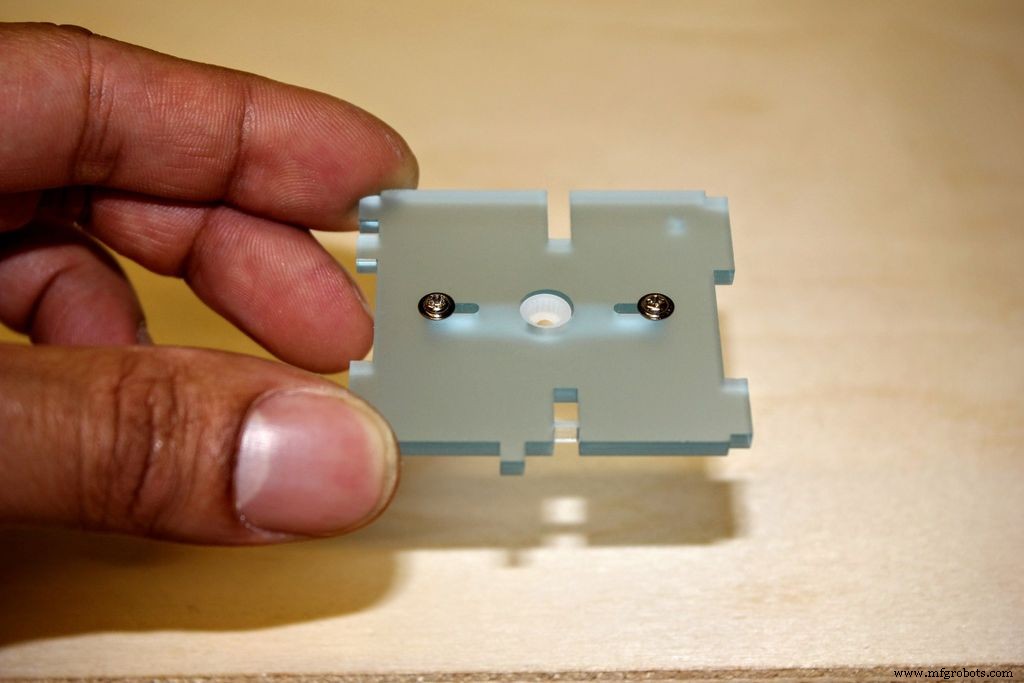 <図>
<図> 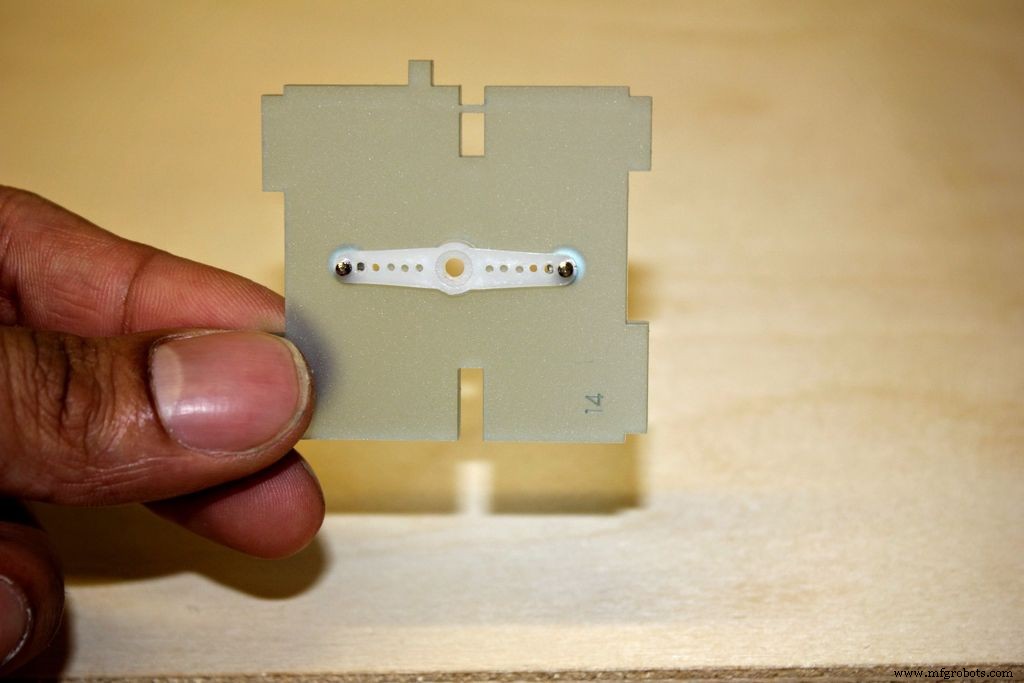 <図>
<図> 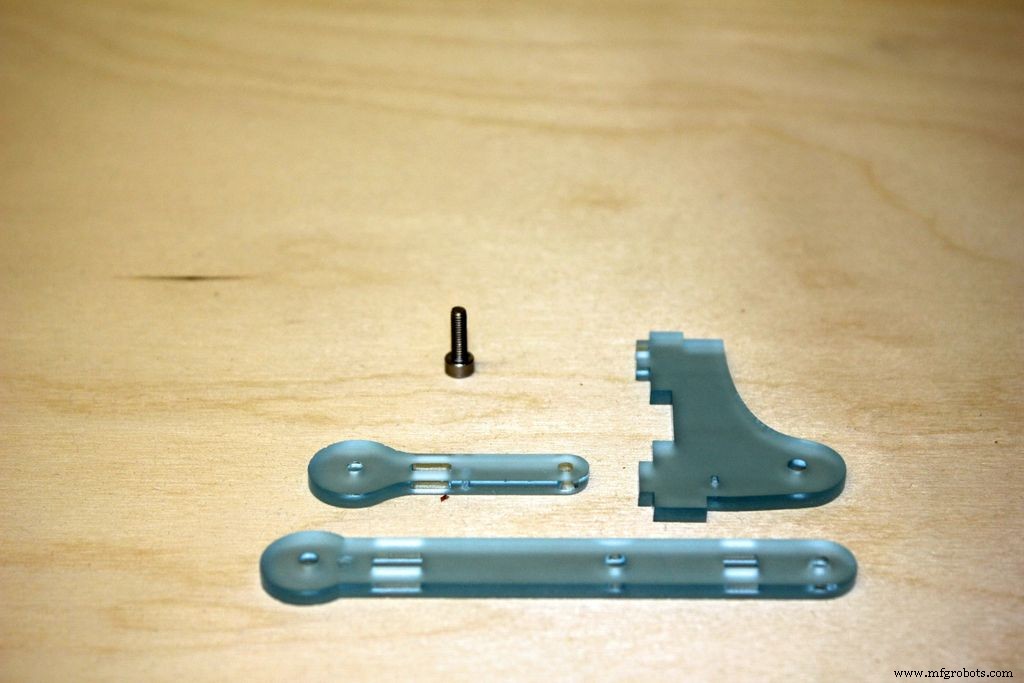 <図>
<図> 
これらのパーツは、左右のセクションを結合します。私たちはそれらをベースとブタと呼びます。
ベースについては、パーツ#14とサーボ固定パックを見つけてください。向きに注意して、鋭利なネジを使用してサーボホーンを取り付けます。この段階で、左側のピースまでそれを提供して、物事が正しい方向に進んでいるかどうかを確認します。ポカヨークはここに道を示すはずです。
豚の場合は、パーツ#8、#9、#10、および10mmネジを見つけます。示されている順序でネジを締めます。ネジは#8側から入り、#9にセルフタップして、#9、#10、#8になります。申し訳ありませんが、その順序はわかりにくいですが、正直なところ、数字で書き留めたのはこれが初めてです。これらが直線経路で軸(ねじ)の周りを移動し、自由に移動することが重要です。まっすぐに動かない場合は、ネジを緩め、一緒に保持してからもう一度ネジを締めて、すべてが可能な限り平行になるようにします。
ステップ7:左から中央 <図>
 <図>
<図> 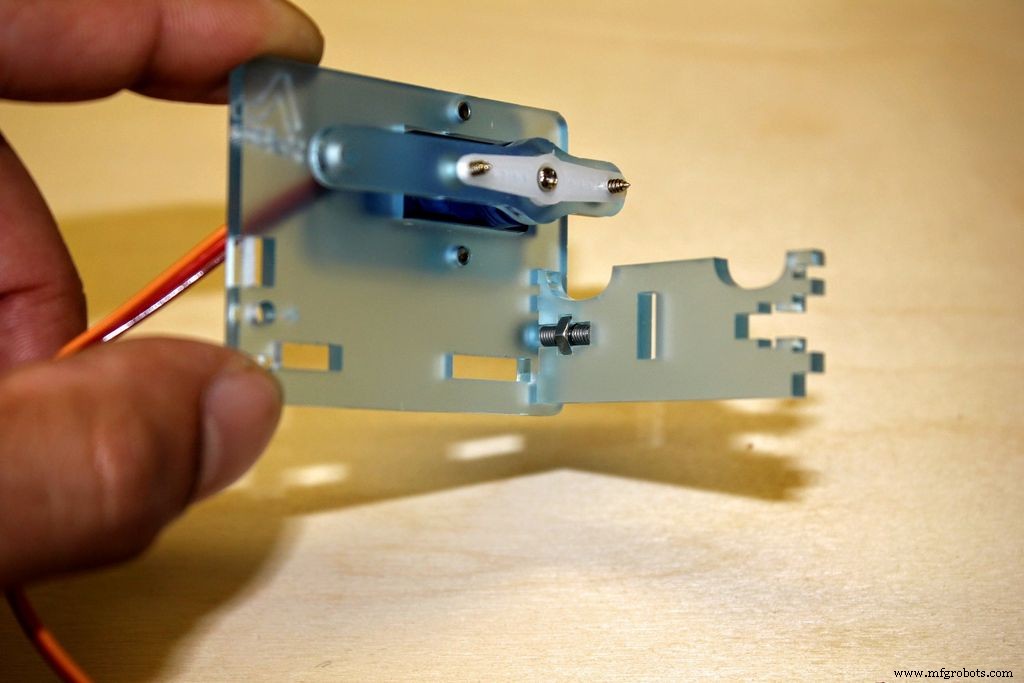 <図>
<図> 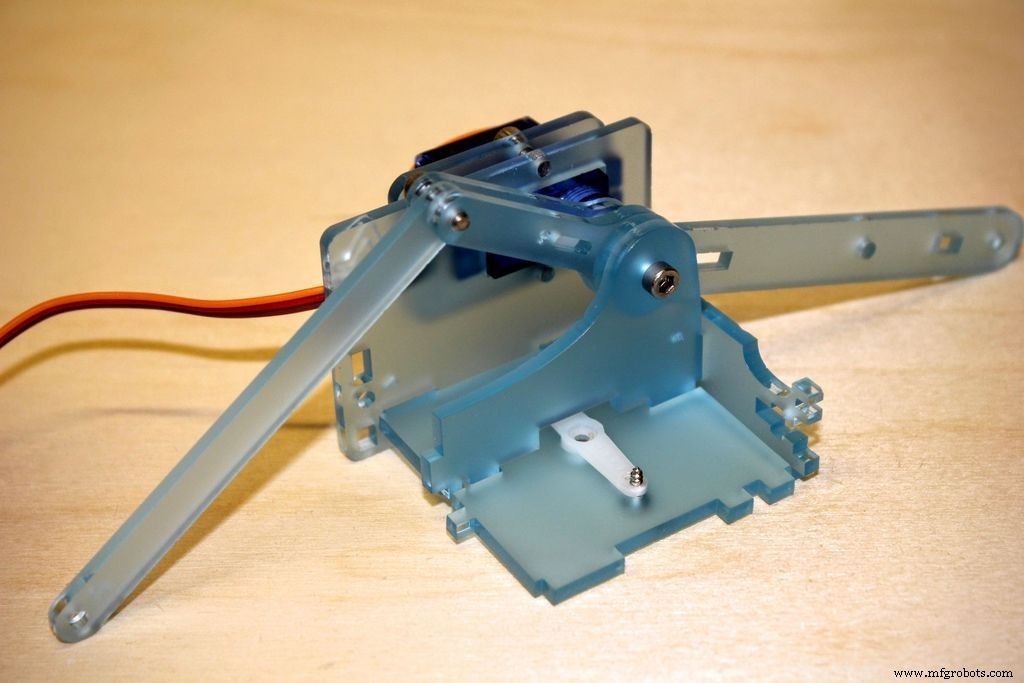 <図>
<図> 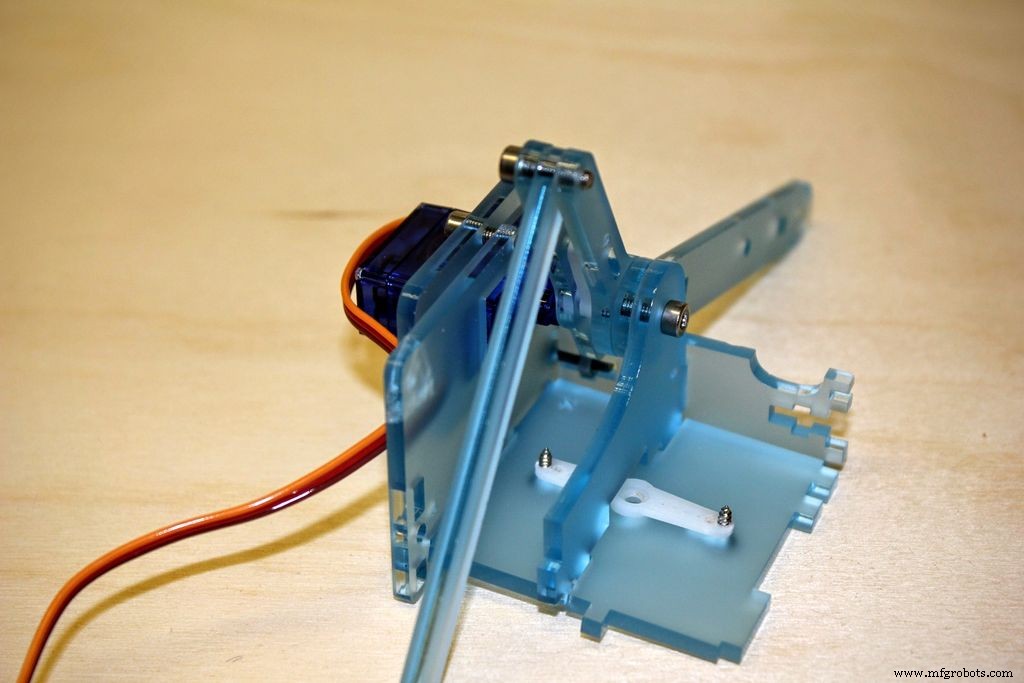 <図>
<図> 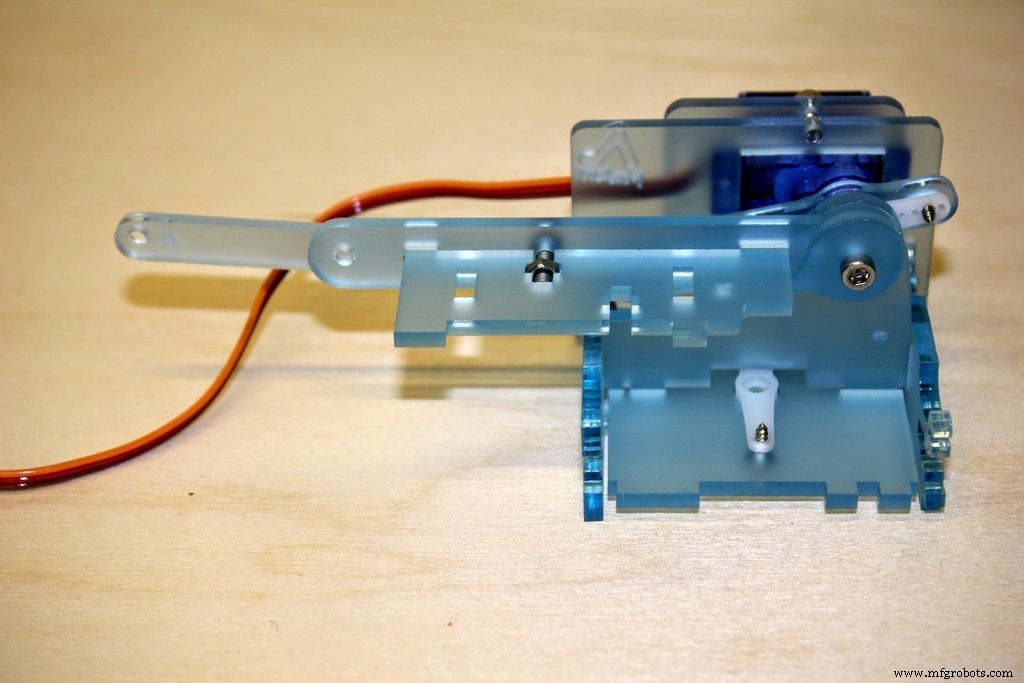 <図>
<図> 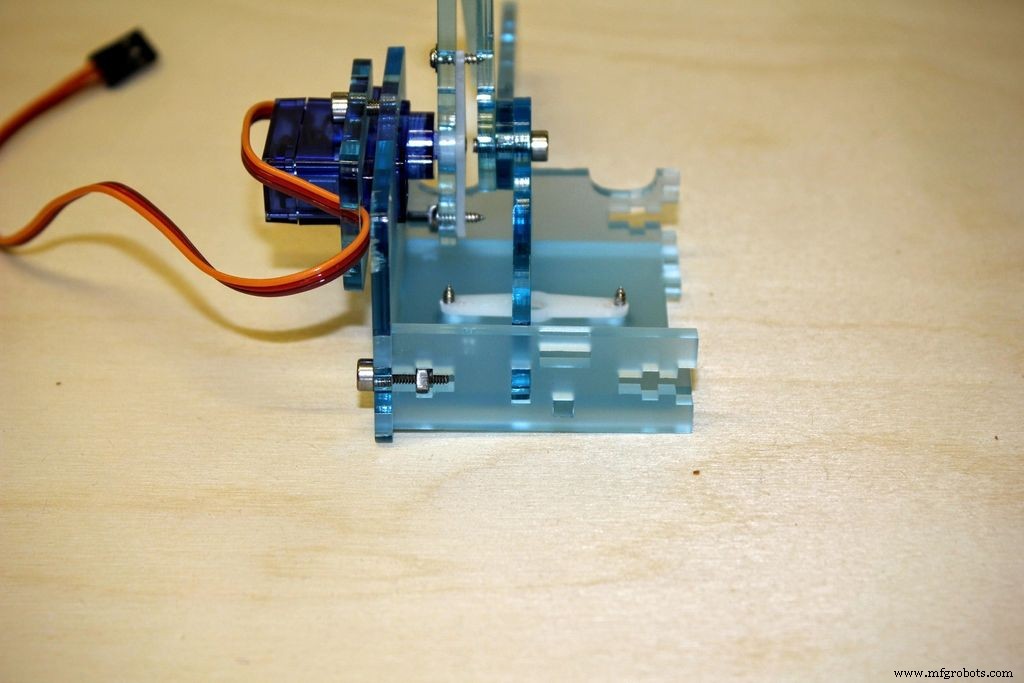
次に、中央のパーツを使用して、左右のパーツをまとめます。
まず、左側のアセンブリを12mmのネジとナットでパーツ#7に取り付けます。これを行う最も簡単な方法は、左側のアセンブリに12mmのネジを押し込み、ナットを半回転程度に置くことです。パーツ#7のスロットをナットの上に置き、ネジを締め始めます。締めすぎないでください。
パーツ#7(フロントストラット)にブタ用のスロットが見えるはずです。ブタをスロットに配置し、ベースパーツを左側のアセンブリのスロットに挿入し、レバーを上に向けてブタのスロットに結合します。ここでサーボホーンを再確認してください。逆さまになっていると、後で本当にイライラするでしょう。
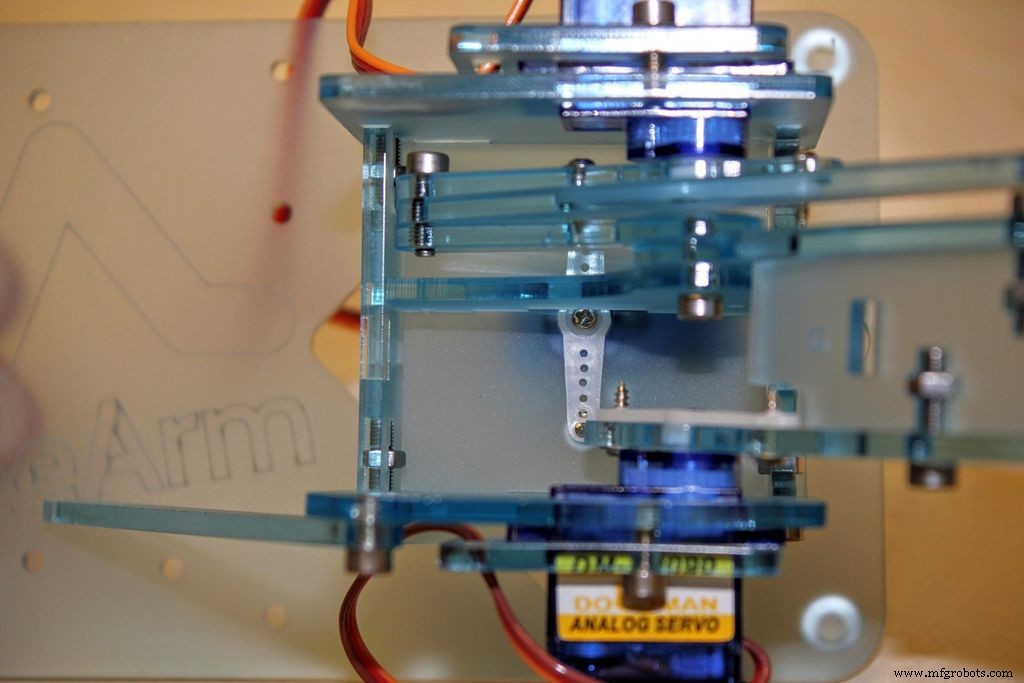
ブタを配置した状態で、レバー(#17)、オプションのスペーサー(#20)をサーボレバー(#6)、およびブタのレバー(#9)に、12mmまたは10mmのネジで取り付けることができます。スペーサーが必要です。ここに見られるドーマンサーボはスペーサーを必要としませんが、私たちが使用する最新のサーボは必要です。この目的のために、パックにはスペアがあります。
次に、フロントストラットと同様に12mmのネジとナットを使用して、リアストラット(パーツ#11)を取り付けます。豚の後部とベースプレートのこぶにスロットを付ける必要があります。これを締めますが、右側のパーツを嵌合するときに調整が役立つので、少したるみを残します。
ステップ8:右に取り付ける <図>
 <図> <図>
<図> <図> 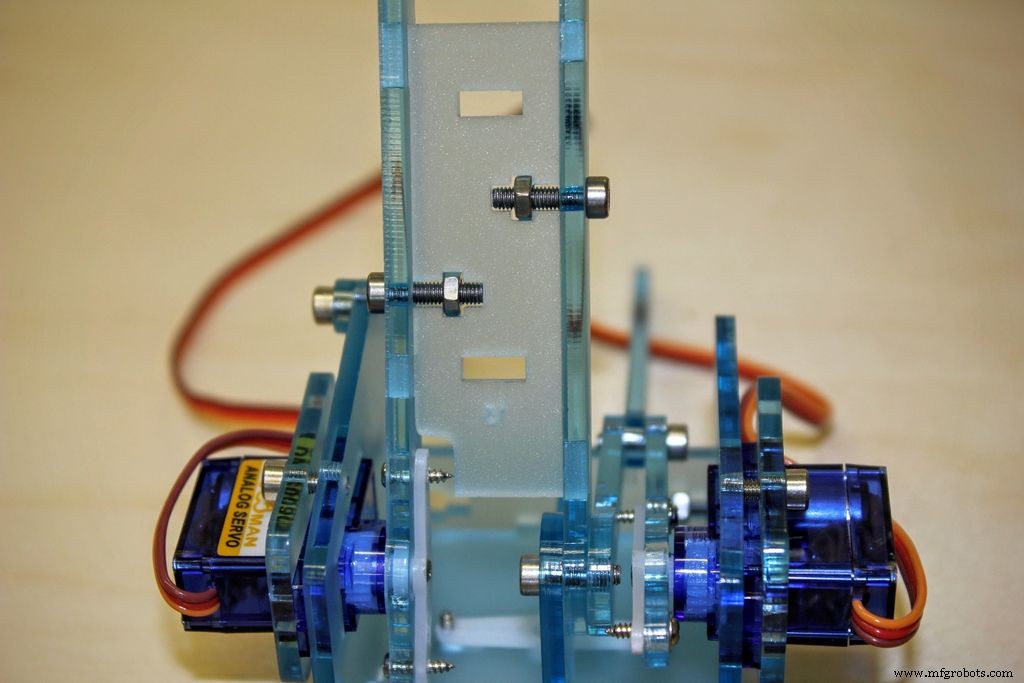 <図>
<図> 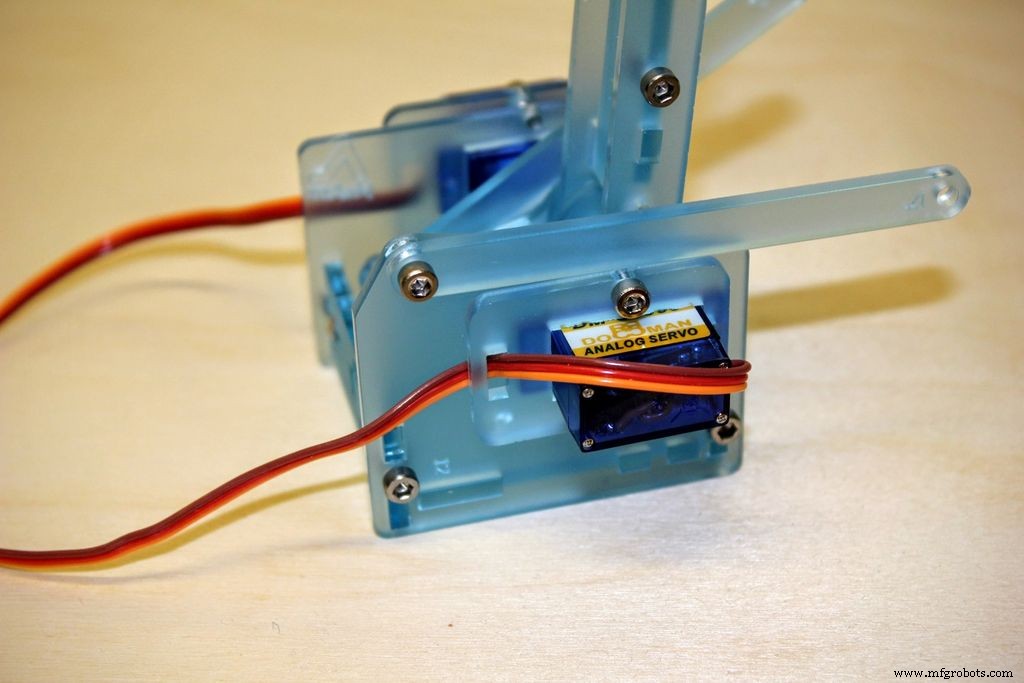
次に、右側を複雑なアセンブリに結合します。これには、ウェビングパーツ#15を装着することも含まれます。
12mmのネジとナットを使用して、パーツ#15をパーツ#10(ブタ上)に取り付けます。
次に、右側をアセンブリの残りの部分に取り付けます。パーツを組み合わせる前に、12mmのネジとナットを右側に通すか、そのままにして後で装着することができます。ここでは、同時に多数のパーツをスロットに入れようとしているため、注意が必要な場合があります
時間をかけて、しばらくお待ちください。このステップは、ビルド全体で最も注意が必要です。これを実行すると、約束が簡単になります!
ステップ9:ベースに取り付け、左前腕を追加 <図>
 <図>
<図> 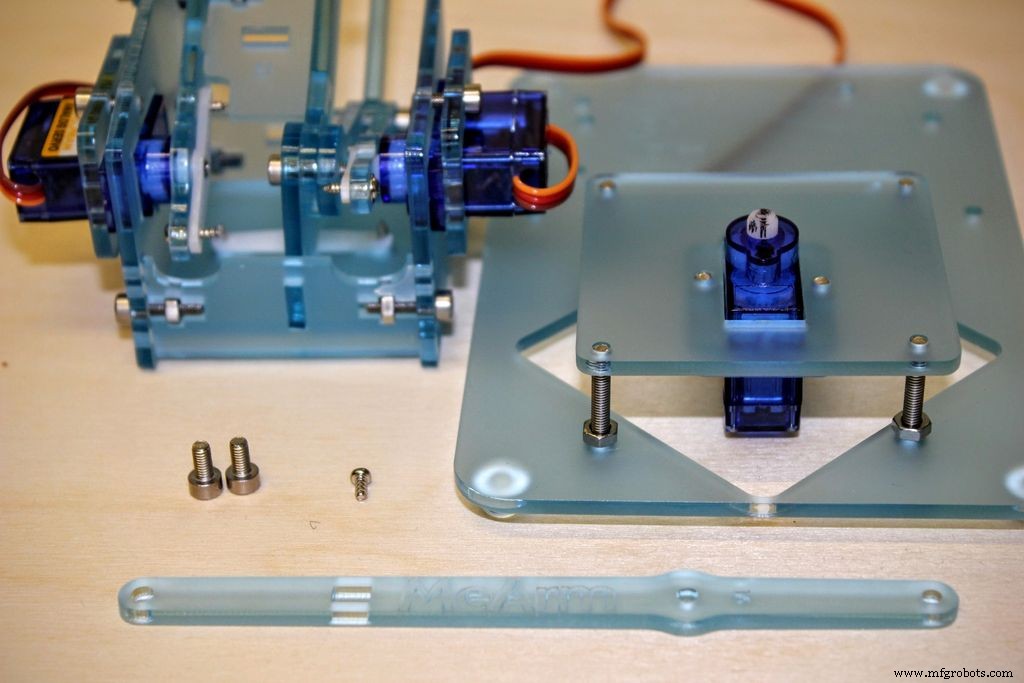 <図>
<図> 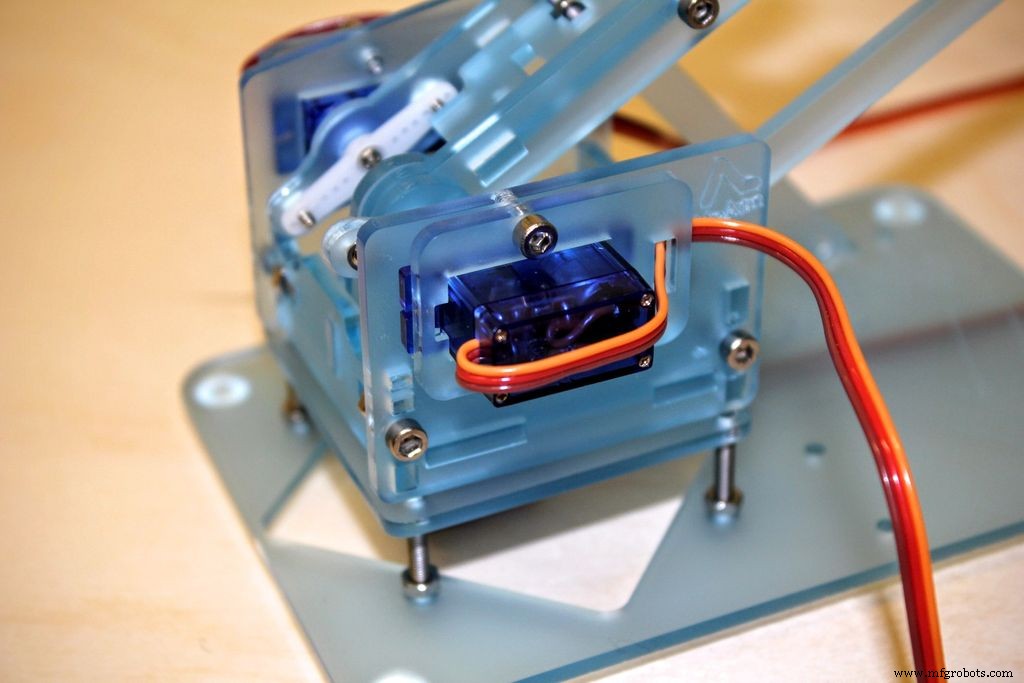 <図>
<図> 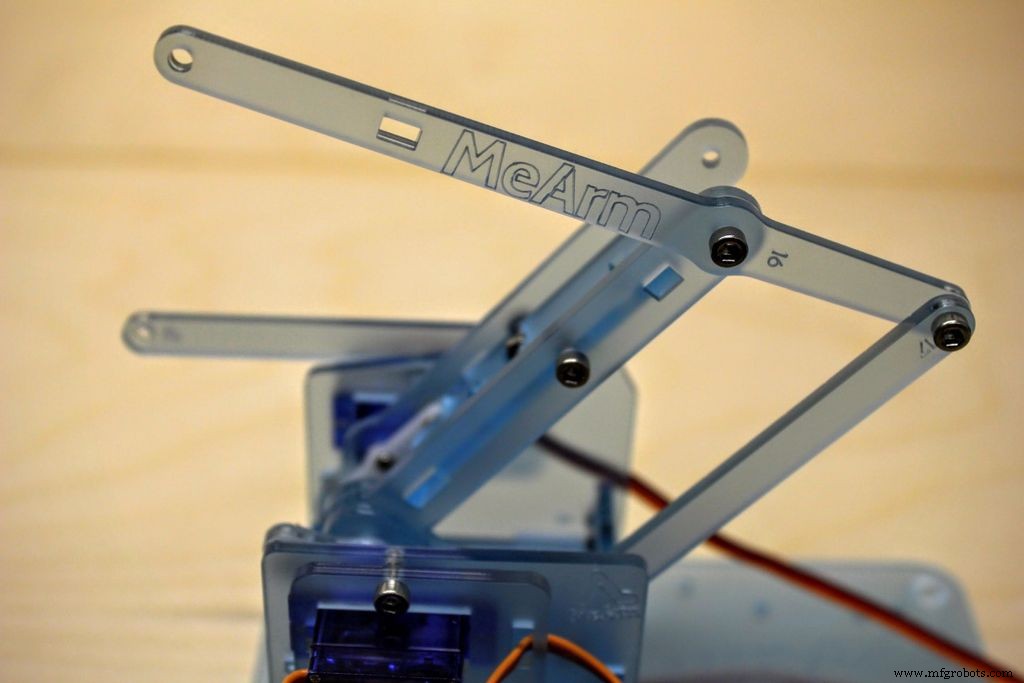
これで、素敵なセンターアセンブリが完成し、ベースにねじ込むことができます。
これは、サーボホーンをセンターサーボに接続し、ネジで固定することです。
これで、2本の6mmネジを使用してパーツ#16を追加できます。これにより、パーツ#10と#17にねじ込まれます。この新しいパーツでサーボを簡単に動かすことができるはずです!
ステップ10:右前腕 <図>
 <図>
<図> 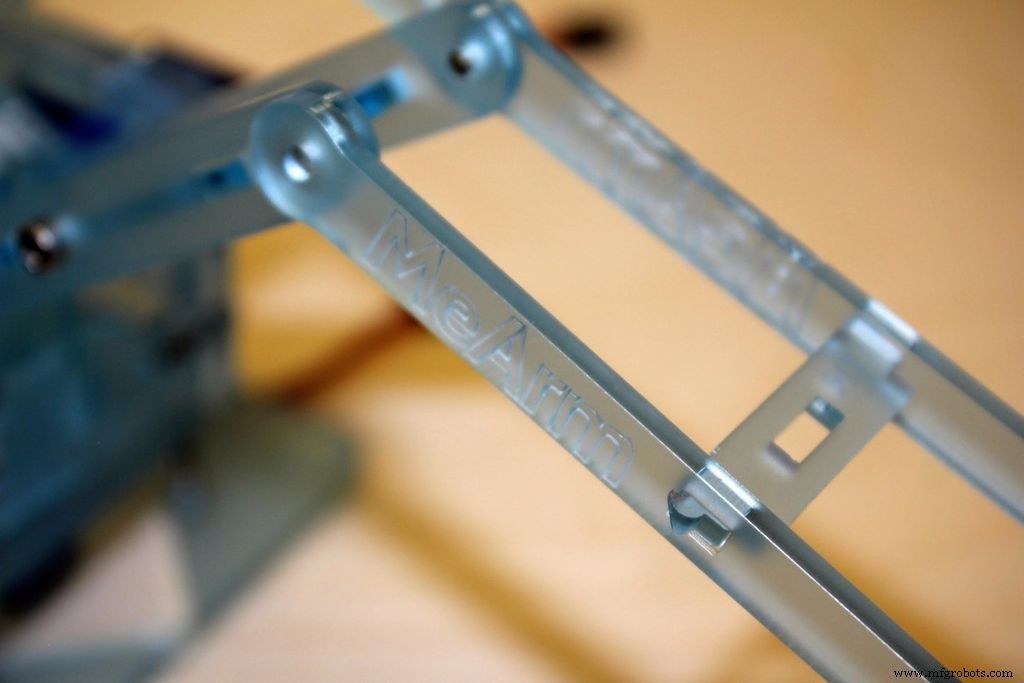 <図>
<図>  <図>
<図>  <図>
<図> 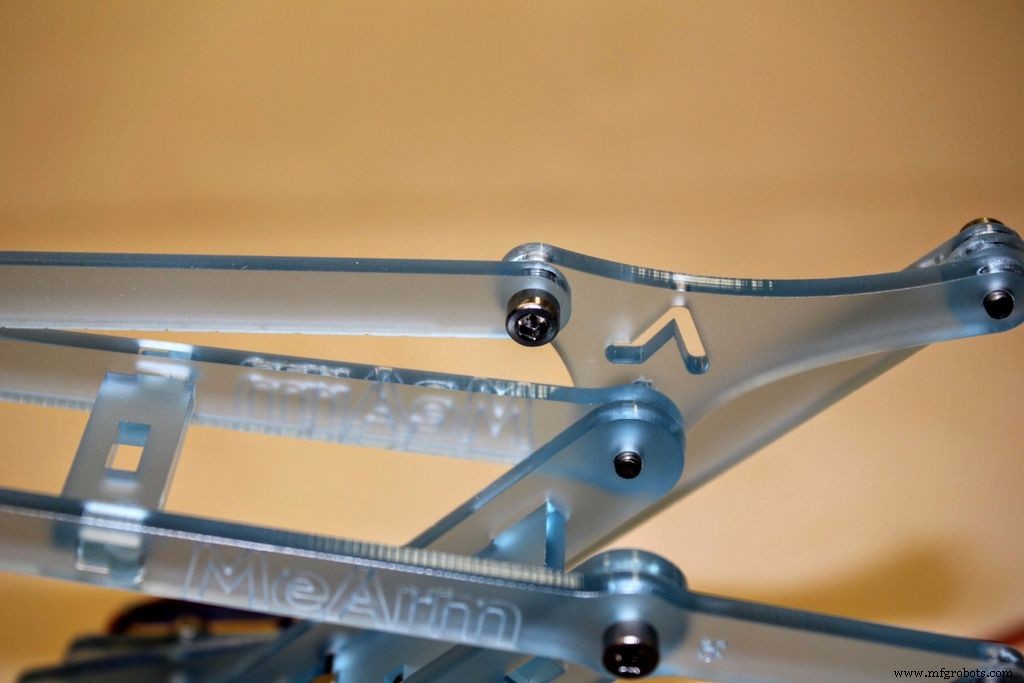
次に、右前腕を作成します。
最初に行うことは、パーツ#18を、取り付けたばかりの左前腕パーツにフックし、次に、番号が付けられていないように見えるため、パーツ#31と呼ぶ右前腕にフックすることです。
三角形のパーツ#19をパーツ#31とパーツ#13(サーボに取り付けられているビット)に10mmのネジで取り付けます。これらすべての部品が自由に動く必要があるので、締めすぎないでください。
パーツ#19の背面を右側のパテに取り付けられたパーツ#17に取り付け、10mmのネジとスペーサー(#20)を間に使用します。
次に、最後のパーツ#17をパーツ#19の内側前面に6mmのネジで取り付けます。
ステップ11:爪を作る! <図>
 <図>
<図> 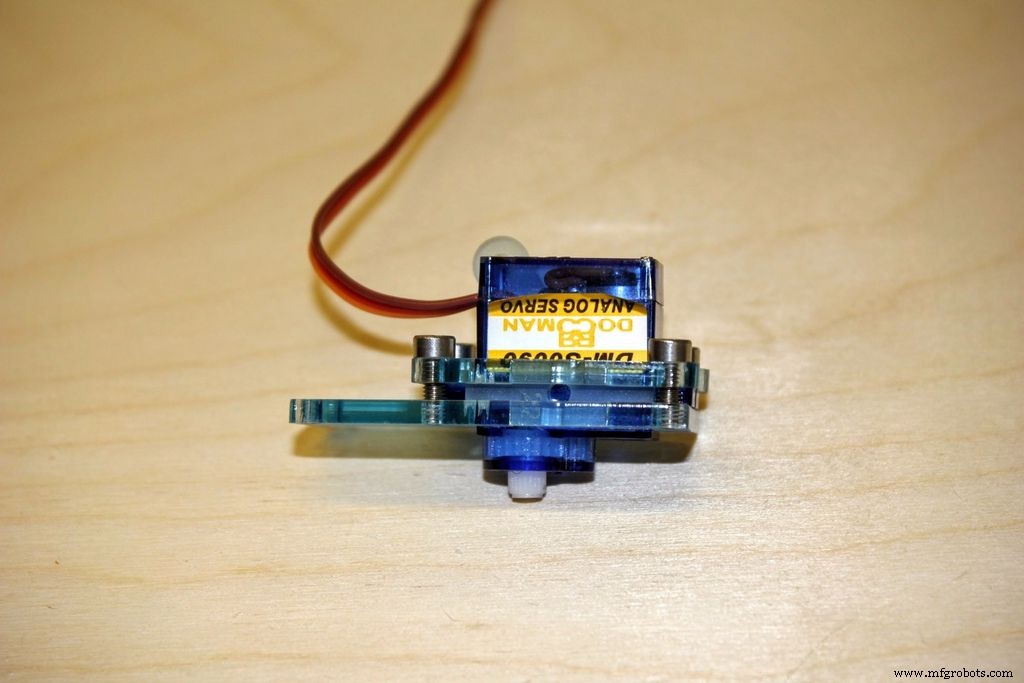 <図>
<図> 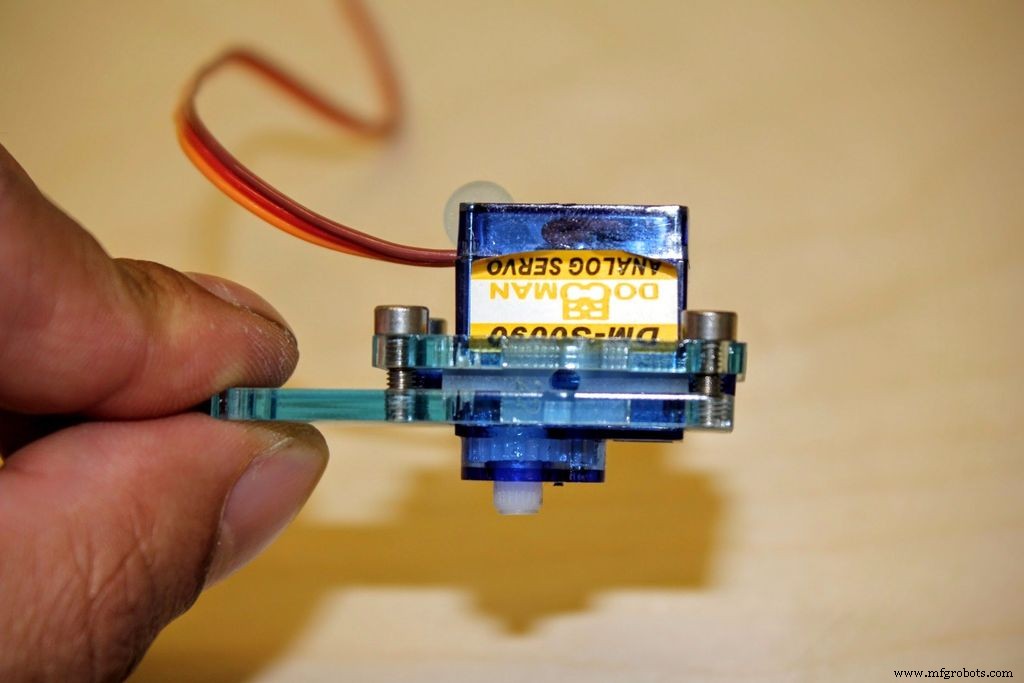 <図>
<図> 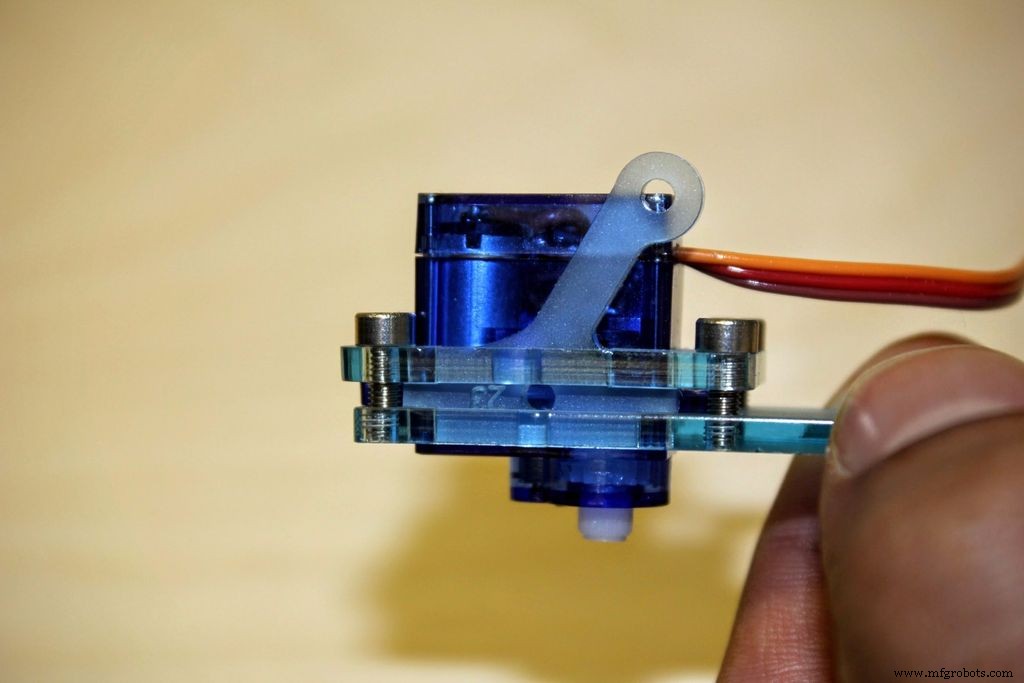 <図>
<図> 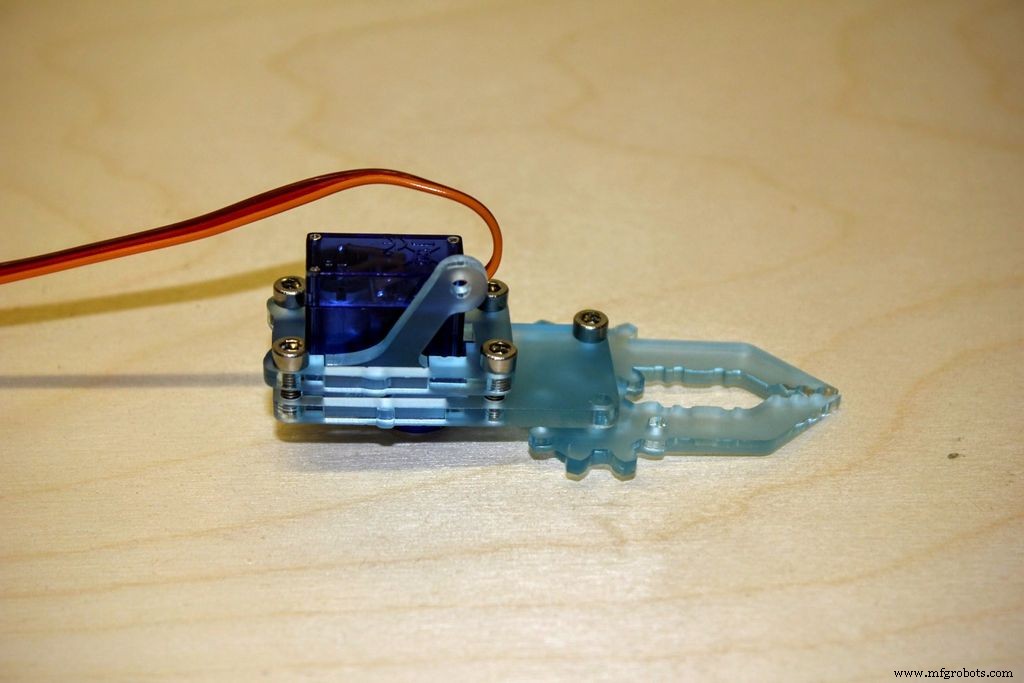 <図>
<図> 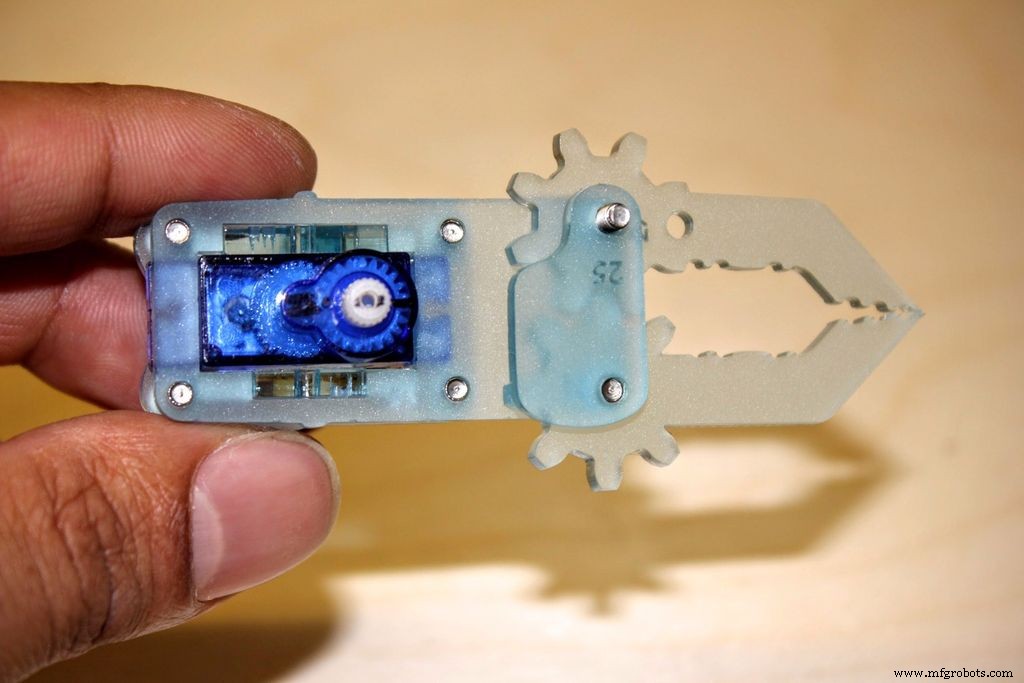 <図>
<図> 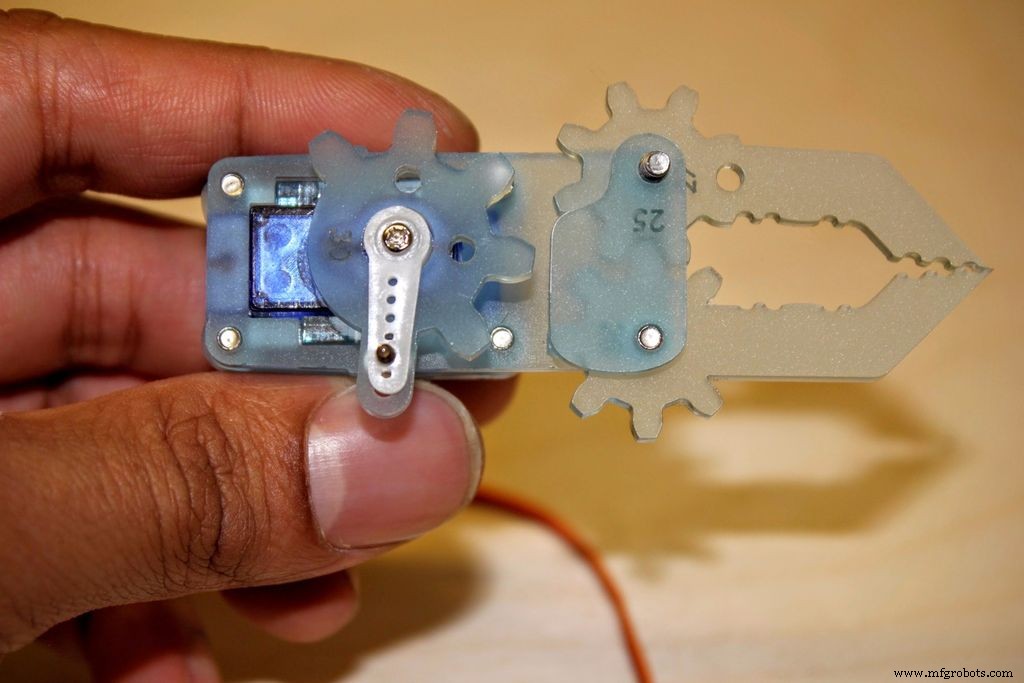 <図>
<図> 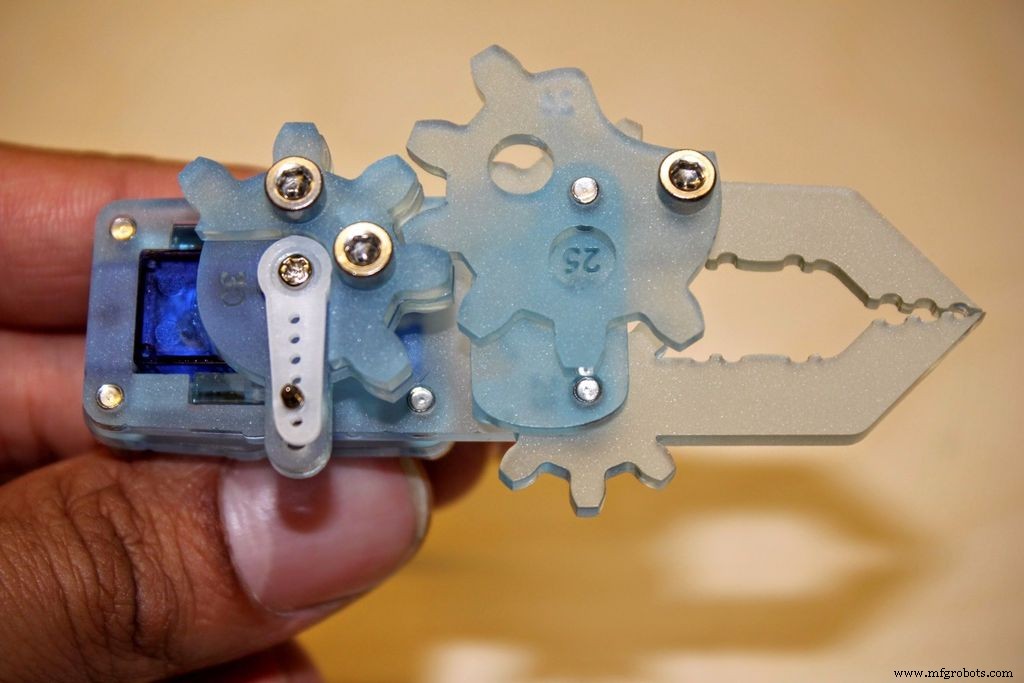
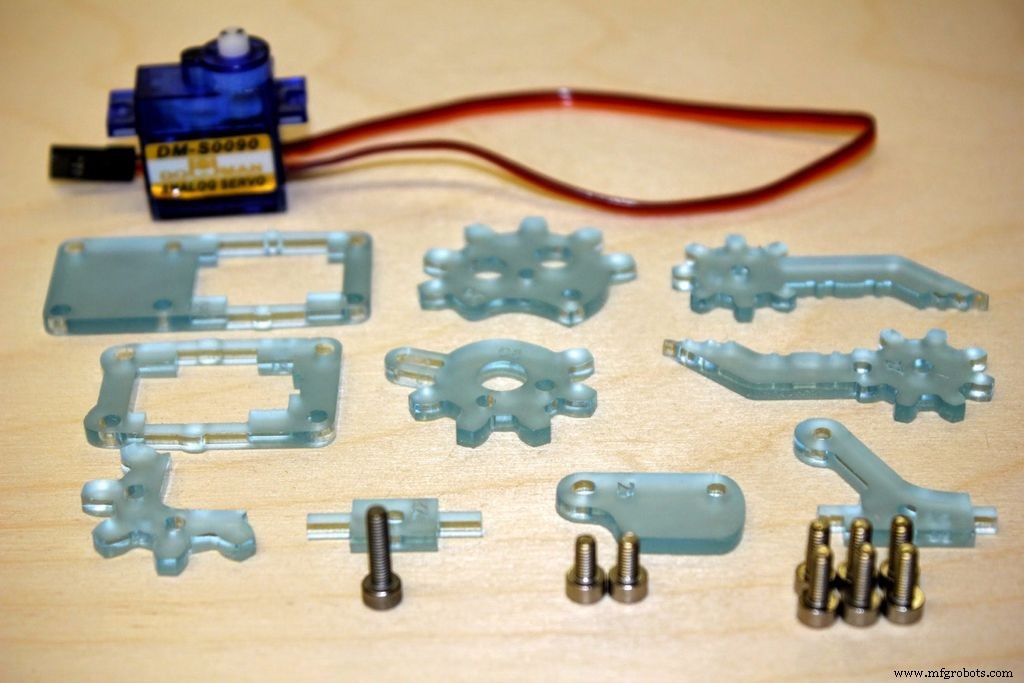
残りのカラー#21にサーボを通します。部品#22と#23をサーボと部品#21で作られたサイドスロットに挿入し、部品#24を使用して4つの8mmナットで固定します。もう一度注意してください、私たちはもうすぐそこにいます、あなたは何も壊したくないのです。
次の部品は最後のネジが所定の位置に来るまで少し固定されていないので、今何かを落としても心配しないでください。パーツ#28を8mmネジでヘッドアセンブリの左側の穴からパーツ#25に固定します。次に、パーツ#27のギアを噛み合わせ、12mmのネジを、ヘッドアセンブリとパーツ#25に通します。これはまだ安全ではありませんが、一緒に保ちます。
部品番号30にサーボホーンを取り付け、小ネジを使用してサーボに固定します。 2本の6mmネジを使用して#29を#30に取り付けます。
これで、#26を緩い12mmネジに取り付け、パーツ#27の追加の穴に8mmネジで固定できます。
ステップ12:頭を追加する <図>
 <図>
<図> 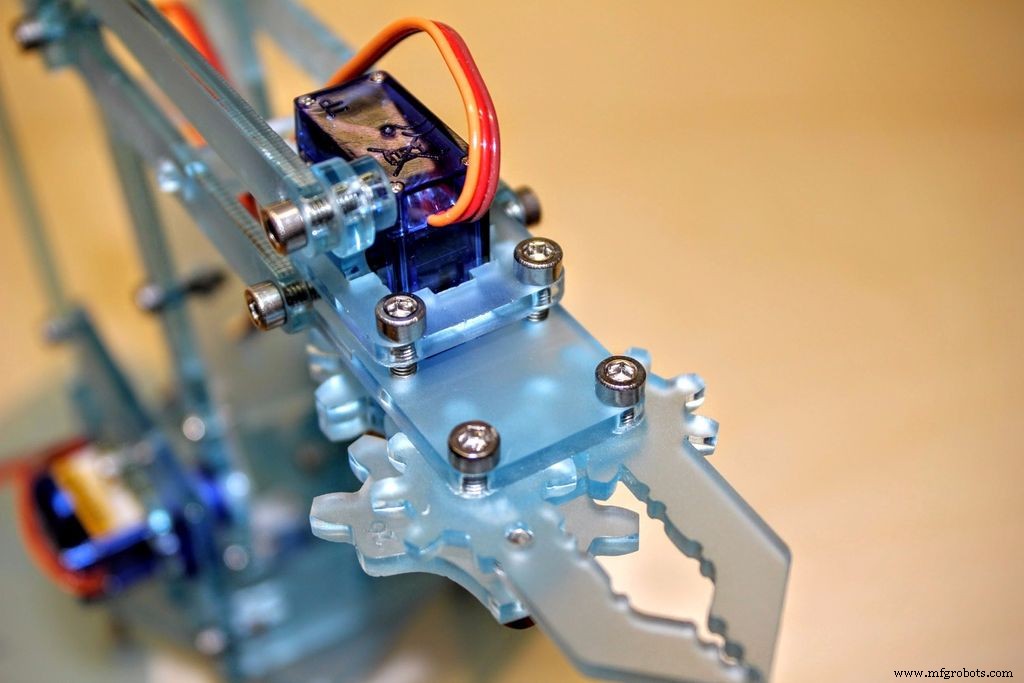 <図>
<図> 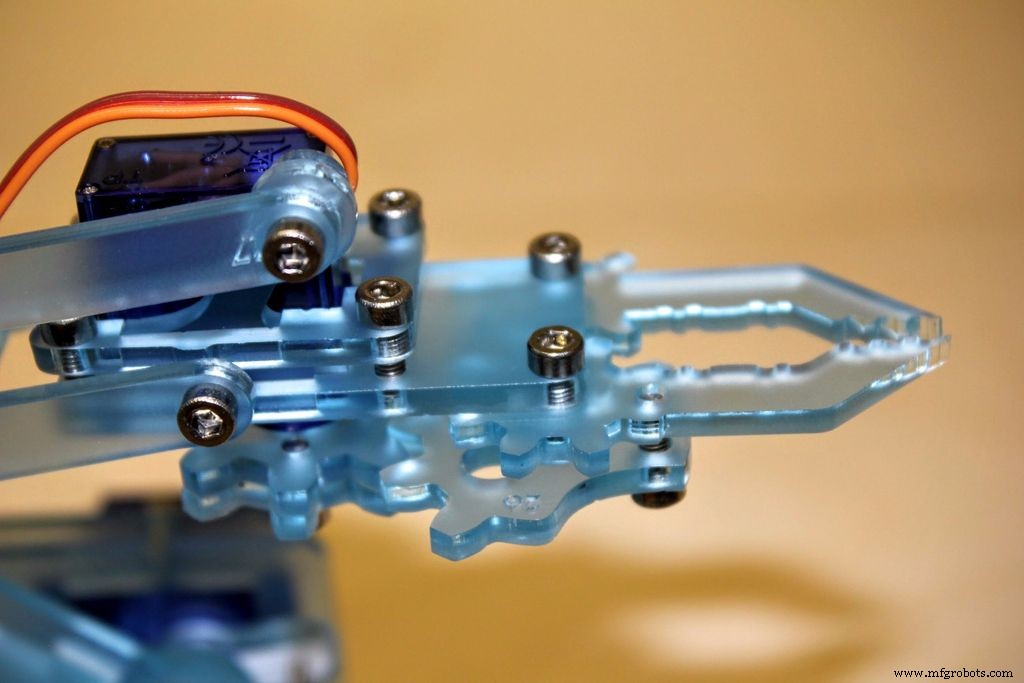
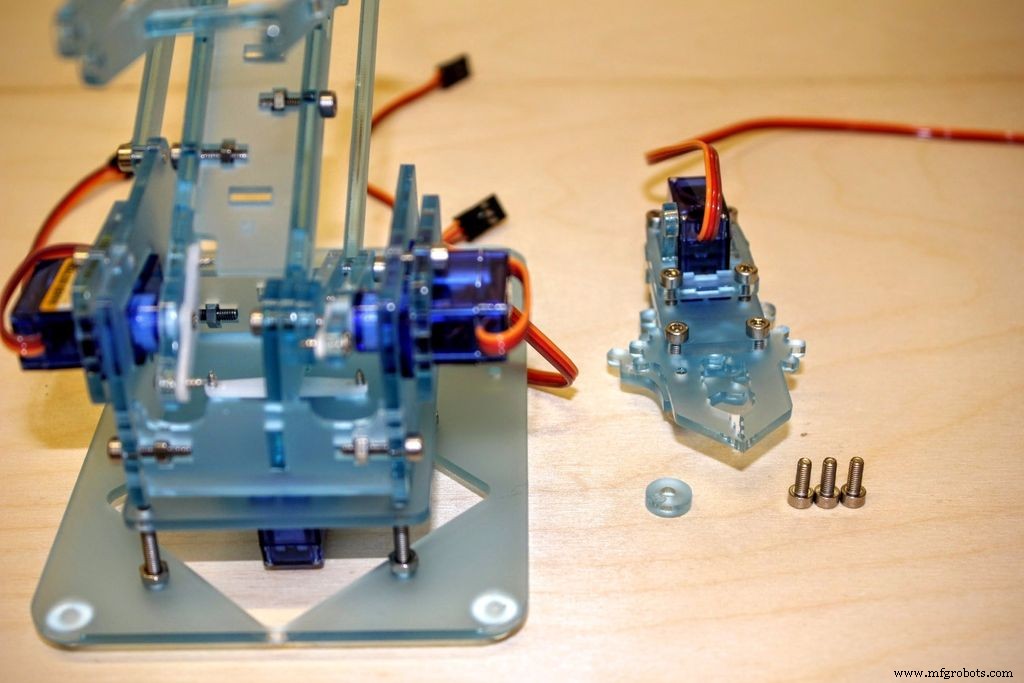
最後の部分はヘッドを取り付けることです。
これは、前腕を介して2本の8mmネジで、頭のパーツ#22と#23に固定されています。ヘッドサーボクラムの8mmネジを緩めやすくなる場合があります。
スイッチを入れてプレイしてください!
ステップ13:トラブルシューティング
このセクションは、時間の経過とともに一般的な問題で埋められます。お持ちの場合はお知らせください。追加できます。
左サーボアームが動かなくなったように見えます。通常、これは堅い関節に帰着します。ヘッドアセンブリのアタッチメントは、人々が忘れているものです。
コード
- 無題のファイル
無題のファイル Arduino
#includeサーボ中央、左、右、爪; // 4つの「サーボオブジェクト」を作成しますvoidsetup(){Serial.begin(9600); middle.attach(11); //ピン11のサーボを中央のオブジェクトに接続しますleft.attach(10); //ピン10のサーボを左側のオブジェクトに接続しますright.attach(9); //ピン9のサーボを右側のオブジェクトに接続しますclaw.attach(6); //ピン6のサーボを爪オブジェクトに接続します} void loop(){middle.write(90); //値(度)に従ってサーボ位置を設定しますleft.write(90); //同じright.write(90);を実行します//そして再びclaw.write(25); //はい、あなたはそれを推測しましたdelay(300); //サーボを揚げることができるサーボを常に更新するわけではありません}
コードベンダー
https://codebender.cc/sketch:148456 カスタムパーツとエンクロージャー
製造プロセス