


リサイクル材料からのロボットアーム
コンポーネントと消耗品
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
ロボットアームは、オンラインで見つけることができる最も人気のあるDIYプロジェクトの1つです。 Arduinoロボットアームのバージョンを設計するために座ったとき、私たちは挑戦し、リサイクルされた材料からそれを作成することにしました。私たちがメーカーであるという見方は、箱から出して考え、無駄を増やすことなく、利用可能なさまざまな素材をどのように利用するかを自問することも意味します。廃材とペットボトルを使って、ロボットアームの本体を組み立てました。オンラインで学んだペットボトルから熱収縮を作り、ロボットが転倒しないように、おもりとしてジャガイモ(!)を使用しました。
このプロジェクトは、私たちが作るが好きな理由を思い出させてくれたので、とても楽しかったです。 そんなに。
このプロジェクトや他のプロジェクトの完全なチュートリアルは、ブログでも見つけることができます。
注: ビデオ以前のバージョンのcircuito.ioが表示されるため、チュートリアルの手順に従うことをお勧めします。
エレクトロニクス
主なコンポーネント
- Arduino UNO
- 3 SparkFun Servos(Generic Metal Gear)
- PS2ジョイスティック2軸モジュール
二次コンポーネント
- 電圧レギュレーター5v
- 電解コンデンサ-1uF / 50V
- コンデンサセラミック100nF
- HeatSink TO-220
- ブレッドボード-ハーフサイズ
- ジャンパー線パック-M / M
配線図を見るにはここをクリックしてください
<図>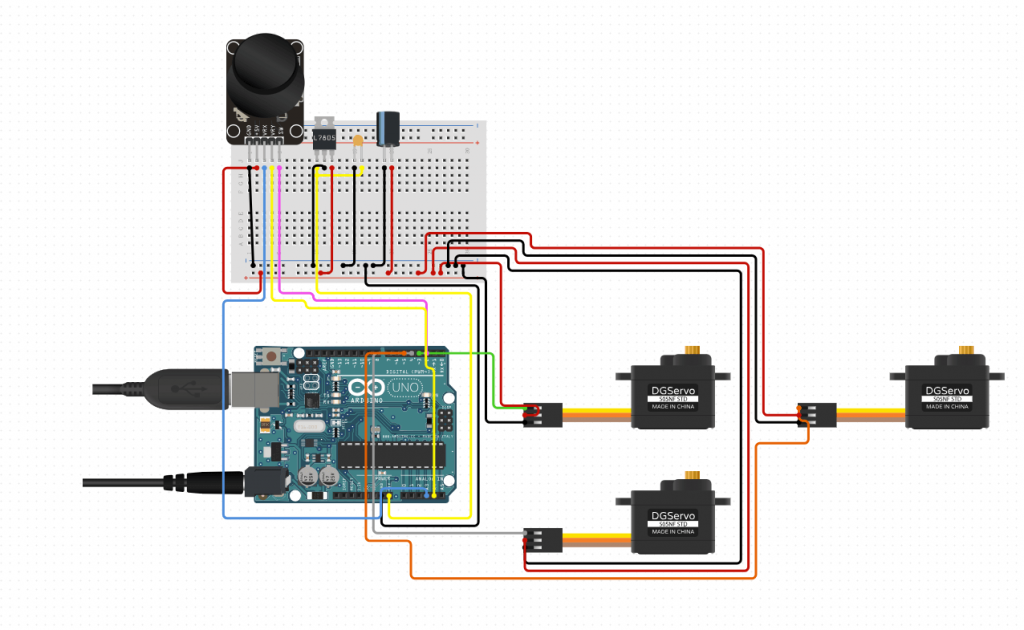
ロボットアームコード
- まず、回路コードをダウンロードする必要があります Circuito.ioのコードタブから。
- 手順に従って、正しく配線されていることを確認してください
- circuito.ioのfirmware.inoテストコードをリポジトリ内のfirmware.inoコードに置き換えます。他のライブラリはそのままにしておきます。
- 必ず「ライブラリを含める」と「ピンの定義」を残してください。ピンの定義が一致していることを確認してください。
材料 <図>

- ワークショップで持っていた厚さ1cmの木くずを使用しました。いくつかの場所では、強度と堅牢性を高めるために2つの部品を接着しました。身の回りにある他の素材をチェックできますが、頑丈でありながら柔軟性があることを確認してください。
- 部品をつなぐために、ペットボトルから熱収縮を作りました。家にあるペットボトルで作ることができる素晴らしいテクニックです。遊んで、これらを少しテストしてください。それらがどれほど強力であるかに驚くでしょう。
- アームは3軸で動くため、3つのサーボモーターを使用します。これは、プロジェクトにサーボモーターを選択する方法を説明する優れた記事です。 Sparkfunサーボ(一般的なメタルギア)を使用します。
組み立て
ベース
腕が転倒しないように、しっかりとしたベースでビルドを開始します。同時に、土台がしっかりするように木片を束ねて結ぶための最良の方法を理解する必要もあります。
下の画像では、ウェイトとしてヒートシュリンクとポテト(!)をベースとして使用した方法を見ることができます。時々交換することを忘れないでください:)
<図>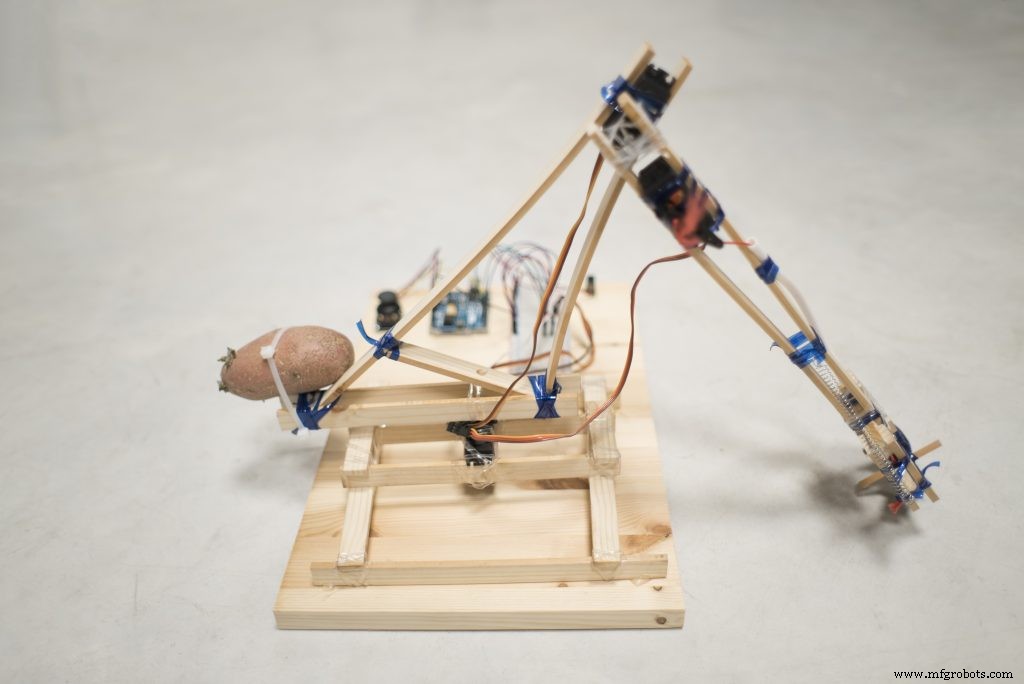
バランス
2番目のサーボを配置するのはもっとトリッキーで、この領域にはまだ注意が必要だと感じています。プロトタイプを作成した後、上腕のバランスをとるのに十分な考えがなかったことに気づきました。したがって、サーボモーターには大量の電流が流れます。これは、アームの反対側にあるカウンターウェイトを使用することで克服できます。
<図>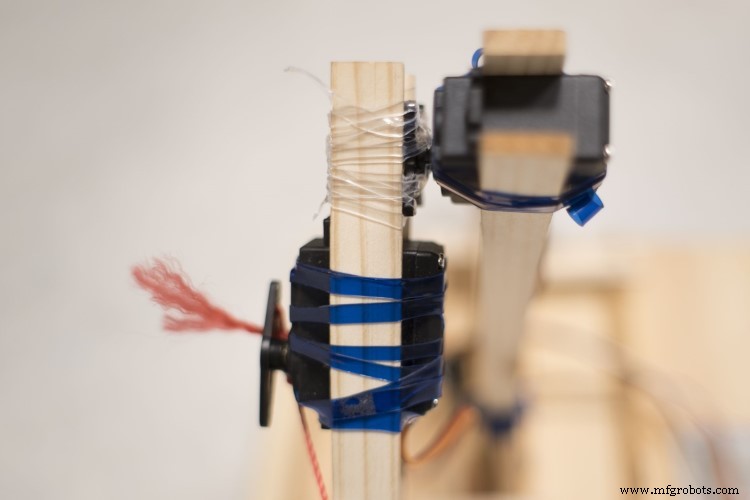
グリッパー
検討したグリッパーにはさまざまな種類があり、ここで何をするのかよくわかりませんでした。最終的に、グリッパーの片側を静的にして、グリップが強くなるようにすることにしました。下の画像でわかるように、可動部分には、サーボによって制御されるジョイントを作成し、開閉用のスプリングを追加しました。
<図>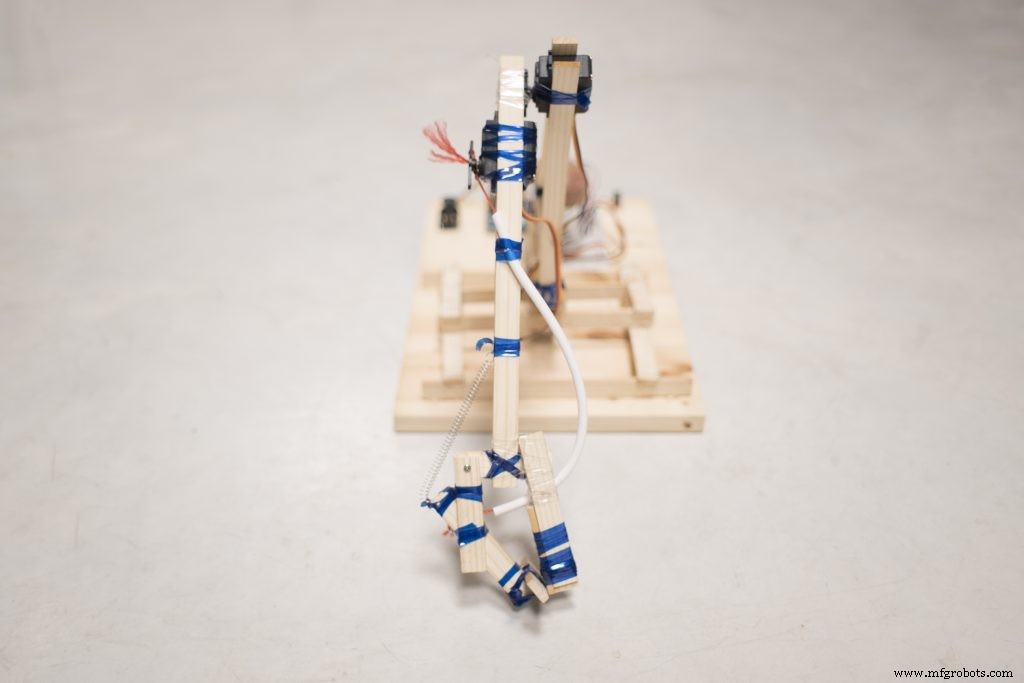
最終的には、弾性チューブ内にストリングを配置して、サーボモーターとグリッパーを接続しました。これは、自転車のブレーキに見られるのと同じメカニズムです。
基本的にはそれだけです!使用する素材や電子機器に応じて、コードやメカニズムに微調整や変更を加える必要があります。洞察やコメントがあれば、ぜひお聞かせください。フォーラムまたは以下のコメントで共有してください
コード
ロボットアームコード
1.circuito.ioのfirmware.inoテストコードをこのリポジトリのfirmware.inoコードに置き換えます2。他のライブラリはそのままにしておきます。3。必ず「ライブラリを含める」と「ピンの定義」を残してください4。ピンの定義が一致していることを確認してくださいhttps://github.com/Circuito-io/Robotic-Arm製造プロセス