


産業用ロボットの統合を妨げているものは何ですか?
産業用ロボットの統合は、高度に専門化され、創造性が高く、狡猾なプロセスですが、それを実践する人々は、人間の創意工夫と機知に富んだアイデアそのものの功績であることがよくあります。多くの点で、ロボティクスインテグレーターは、製造業者が生産性を向上させるのを支援する、高度に専門化された、非常に有能なソリューションアーキテクトの軍団を代表しています。
残念ながら、リーチとスコープを保持していることがいくつかあります。 産業用ロボット統合のバック。さらに、最も苦しんでいるのは、実績のある真の職人、つまり私たちが信頼しているロボティクスインテグレーターです。これは、ロボット工学の統合に適したスキルを持つ人材を見つけるのが難しいだけでなく、仕事自体が要求が厳しく、退屈で、多くの製造シナリオで見返りが限られている可能性があるためです。
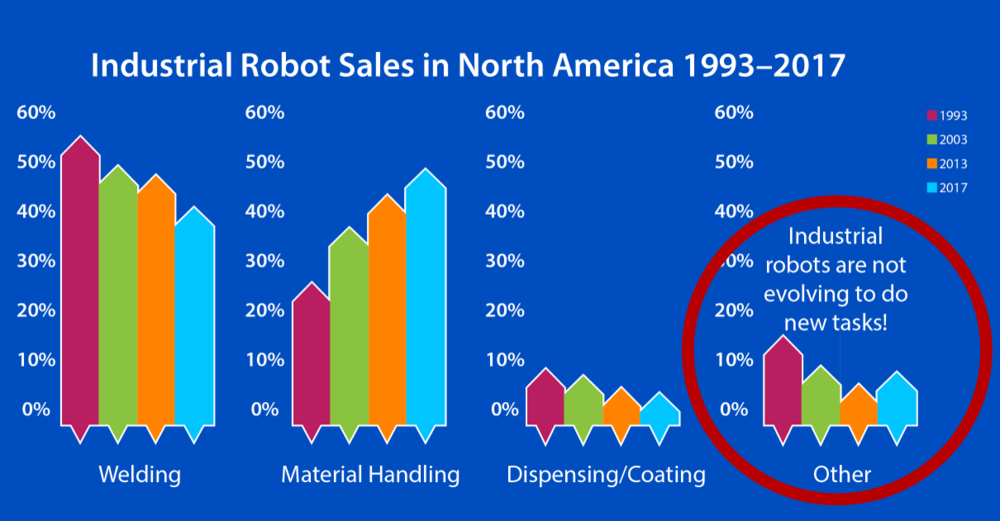
それらを妨げているのはロボット工学について何ですか?ええと、1つには、プログラミングは非常に要求の厳しいプロセスであるため、プログラミングを容易にするための努力は、多くのインテグレーターにとって本来あるべき重大な影響を及ぼしていません。プログラミングが簡単な場合でも、今日のロボットは、多種多様な部品や非構造化環境に適応するように構築されていないため、多くの工場からロボットを効果的に排除しています。 3Dビジョン、センサーフュージョン、およびさまざまなテクノロジーにより、ロボットの自律性が向上することが期待されますが、物事を簡単にするための適切なスキルとソフトウェアはまだありません。
幸いなことに、適切なソリューションは、ロボットインテグレーターが最終的にこれらすべての問題に一度に取り組むのに役立ちます。そうすることで、これまで不可能だったさまざまな業界、プロセス、サービスの機会への扉が開かれます。
プログラミングを簡単にするだけでは十分ではありません
ロボット工学自体の概念は、現代の工学における他の慣行と比較して、まだサイエンスフィクションの領域にいくらか隣接しています。故障、シャットダウン、または壊滅的な障害のリスクなしに、プロセスを100回、1000回、さらには100万回確実に自動化するにはどうすればよいでしょうか。
今日提供されている産業用ロボットは、FANUC、Kuka、ABB、Kawasaki、Universal Robots、またはより新興のニッチプロバイダーからのものであるかどうかにかかわらず、実際にはこれらの種類のパフォーマンス基準を満たしています。もちろん、プロセスの制約とメンテナンス要件は尊重されます。
材料の進歩により、これらの著名なベンダーのロボットはさらに、人間の労働者に期待されるものを超えて、より軽く、より機敏に、より正確になりました。これにより、さまざまなジャーク、ドライバー機能などをそれぞれが開発できるようになりました。
これらすべてのケースで、機能と必要なレベルのユーザビリティを実現するために、基本的な開発とエンジニアリングの選択が行われました。このプロセスは骨の折れる作業ですが、さまざまな操作に対するさまざまなロボットの機能、プログラミング、および適合性にも相違が生じます。熟練したロボットインテグレーターは、モデルを管理し、好ましいシナリオで作業する方法を知っていますが、展開するスキルと環境が不足している場合、そうでなければビジネスを成長させ、多様化させる可能性があります。このロボットプログラミング要件の組み合わせは、方法。

この違反では、ロボット操作の計画とプログラミングを簡素化するために、ロボットのすべての異なるタイプと機能を「調和」させることができる主な方法は、統合ミドルウェアであると考える人もいます。
これを実現するために、ROS(または創造的には「ロボットオペレーティングシステム」)が2007年にリリースされました。 ROSは、少なくとも、ロボットアプリケーションの開発と共有において学者に役立つシステムを提供しました。残念ながら、これは最終的に、産業用インテグレータが解決する必要のある問題を解決しませんでした。さまざまな部分と空間的制約にわたる計画、プログラミング、および処理に伴う制限の多くを根本的にスキップする機能です。これらすべてにより、代わりに、より多くのロボットを新しいプロセスや産業に組み込み、統合し、販売することができます。
限定的または最小限のパートランの必要性
最終的に、ロボットミドルウェアは、「ループが開いたまま」であるため、ロボットの統合を根本的に加速しません。ロボットが実行する各製品、プロセス、およびプログラムでは、100%予測可能な一連のシナリオで、すべてのステップをプログラムしてテストおよび検証する必要があります。 。つまり、シナリオがどれほど段階的または支援的であっても、準備には最も重要なロボットプロセスと同じ時間がかかるということです。プログラミングを簡単にしたとしても、それは絶え間ない繰り返しを必要とするプロセスですが、それは十分に簡単ではありません。
特定の産業用ロボットベンダーは、HMI(Human Machine Interfaces)の使用の増加など、より簡単なプログラミング言語と方法論を宣伝していますが、各プロセスはある程度手動でプログラミングする必要があります。そのプログラムは、人間によって生成されたものであるため、検証する必要があります。これは、ロボット工学の統合プロセスで最終的に節約できる時間は限られていることを意味します。
たとえば、機械工場では、反復可能なプロセスのために対面プログラミングが制限されたロボットを使用する傾向が高まっています。このプロセスにより、たとえば、数百の金属部品の実行を適切な精度で迅速に自動化できますが、最終的には、多大な人的労力、監視、およびやり直しが必要になります。
これは「レッグワーク」の多くを達成すると見なすことができますが、特定のショップに限られた程度の生産性を追加するだけであり、さらに、新しい顧客環境にサービスを販売することによってロボットインテグレーターが成長する機会は限られています。同時に、パーツ間や構造化されていない環境でのロボットの切り替えの問題、または単に大規模なジギングを伴わない環境では解決しません。
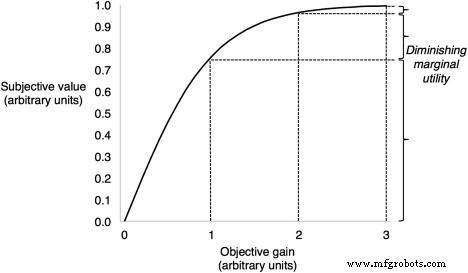
最終的に、これは依然として「限界効用の減少」の法則の犠牲になります。量販店にとって、ロボットの限界効用は比較的高い。機械工場の場合、現在は以前よりも高くなっていますが、ロボット工学インテグレーターに信頼できる顧客ベースを提供するにはまだ低すぎます。何千ものSKUを持ち、製造業の大部分を占めるハイミックスメーカーの場合、ロボットの限界効用は非常に低いため、ロボット工学を定期的に使用するものはほとんどありません。
このような場合、ロボットには、可能な限り「リアルタイム」の方法で部品や環境に実際に応答する機能が必要です。 3Dビジョンの新たな進歩は、ロボット工学インテグレーターがロボットにこれらの感覚を与える機会をもたらし、最終的には、ロボットにプログラミング機能を与えることができれば、プログラミングの課題を完全に克服します。
制限されたセンシングおよびビジョン機能
ROSが初期段階にあったのとほぼ同時に、3Dビジョンにアプローチするまったく新しい方法が開発されていました。 Sensor Fusion –当初はMicrosoftのXbox Kinectシステムで実現されたような3D仮想環境用に開発されました–は、コンピューターが理解できる方法でオブジェクトと環境の比較的正確なレンダリングを可能にしました。
数年後に早送りすると、センサーフュージョンが自動運転車や自律移動ロボットに統合され、それらを生み出したバーチャルリアリティシステムでさらに多くの用途が見つかります。この概念は、純粋に視覚的なセンサーではなく、全地球測位システム(GPS)にルーツがあり、HVAC監視から医療機器まですべてに相対的な牽引力を見出しています。
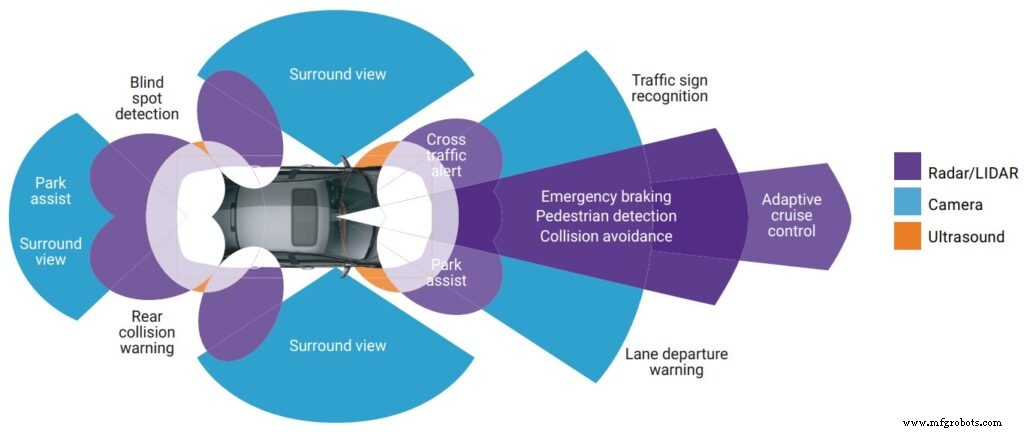
ただし、産業メーカーにとって、センサーフュージョンは有用なアプリケーションとして始まったばかりです。多くの人がインダストリー4.0 / IoTの波に乗っており、リモートモニタリング、エッジ処理のユースケース、または予測メンテナンスを実現するためにセンサーをより多くの場所に統合しようとしていますが、マシンビジョンとロボット工学を組み込むことは、実際には、ある種の応答性を実現するための最良の方法です。産業プロセスにおける彼らのロボット。ロボットに宇宙の物体を識別して処理する機能を与えることで、自動運転車のテクノロジーと同じ自律性を工場のロボットにもたらすことができます。
これらのアプリケーションの一部は現在存在しますが、主要な産業用ロボットおよび周辺機器メーカーから提供される高度に洗練されたシナリオまたはすぐに使用可能なセンサー開発キットにのみ使用されます。これらは、より多くのロボットを混雑した環境に統合するための優れた出発点を提供しますが、主にユースケースの選択に限定され、生産のボトルネックが最も一般的な付加価値プロセスではありません。最終的に、ロボットが見たものからプログラム自体を生成する能力を得るまで、ロボットは混成環境での段階的な改善のみを提供します。
新しい産業への参入を容易にする
ロボット工学のインテグレーターとして、3Dビジョン、センサーフュージョン、または新しくより精巧なタイプのハイミックス製品を組み込んだ新しいソリューションを生成する時間が実際にはない場合があります。多くの人が自動車や同様の業界でのビジネスに非常に満足しているかもしれません。ロボットソリューションを正当化するのに十分なバッチサイズのマシンショップやハイミックスオペレーションにゆっくりと参入することで、さらに多くの人が満足するかもしれません。
ただし、まだ見たことがなく、どこから始めればよいかわからない業界で、より多くのロボットソリューションを展開する方法を探しているインテグレーターにとって、OmniroboticのShape-to-Motion™テクノロジーが方法を提供する可能性があります。このテクノロジーは、3Dビジョンを使用して、形状に応じてオブジェクトを識別し、AIとプロセスのノウハウを使用して、処理中の各パーツに固有のロボットモーションを生成することにより、産業用スプレープロセスをSEES、PLANS、および実行します。その後、既存の産業用ロボットモーションドライバーを使用することで、高度な改良、品質、生産性の向上を実現します。
このテクノロジーにより、最終的には、ロボット工学のインテグレーターは、航空宇宙、重機、主要な家具、電化製品など、さまざまなシナリオでの実装を処理できます。これらは、コーティングアプリケーションがより強化された正確なロボット操作の恩恵を受けることができるシナリオのほんの一部ですが、それでも部品の種類が多すぎる 今日の手動プログラミングソリューションのいずれかから必要なプログラミング時間を正当化するため。
Omniroboticは、ロボットにセルフプログラミングテクノロジーを提供します。これにより、ロボットは重要な産業用スプレーおよび仕上げプロセスを確認、計画、および実行できます。 Omniroboticのチームは、数十年の経験と新しいAI機能を組み合わせて、Shape-to-Motion™テクノロジーと呼ばれるものを通じてこれを提供します。このテクノロジーは、各パーツと特定の要件に対してリアルタイムで独自のロボットモーションを生成します。 ここで、どのような見返りが得られるかを確認してください 。
産業用ロボット