


Arduinoを使用したDIYハンドサニタイザーディスペンサー
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
 <図>
<図>  <図>
<図>  <図>
<図> 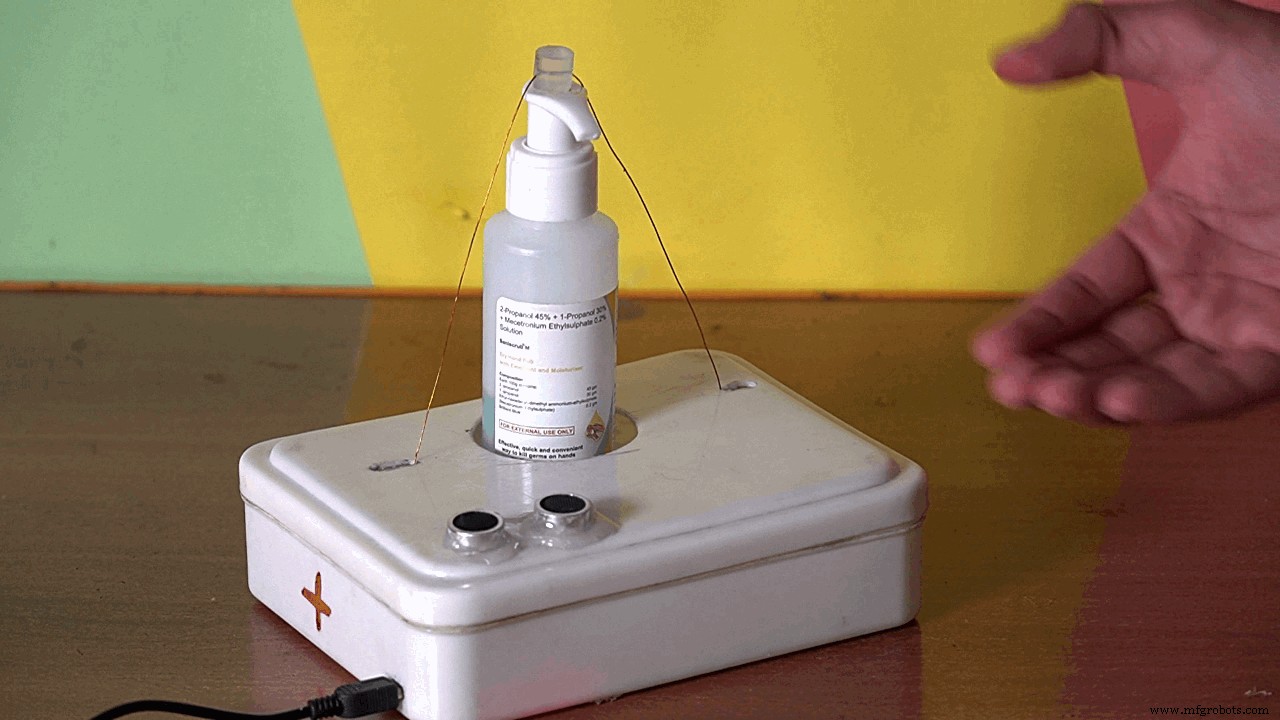
この世界的な発生の現在のシナリオでは、 WHO からアドバイスを受けています。 (世界保健機関)健康を維持する 手洗いと衛生習慣ですが、主な問題はそれを行う方法です。つまり、ボトルへの物理的な接触です。 要するに、これは私たちの目的を果たさないので、このチュートリアルでは、DIYの作り方を学びます。 Arduinoベースの石鹸またはハンドサニタイザーディスペンサー。
備品:
電子機器:
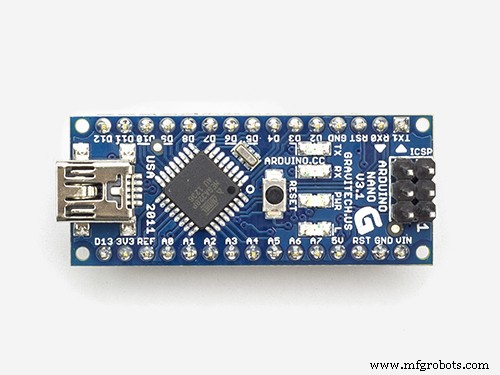
- Arduino Nano(または任意のArduino)。
- 超音波センサー(HC-SR04)
- サーボモーター(金属ギア付き優先)。
- ジャンパー線(メスからメス)。
ツール:
- ホットグルーガン。
- コンピューターまたはラップトップ。
その他:
- アルコールベースの手指消毒剤。 (最も重要)
- セルフネジ山ネジ(1本)。
- 0.8 mm銅線(0.5メートル)。
- プラスチック容器(内部のすべてのものに快適に収まる)
- 静止(マーカーと定規のスケール)。
ステップ1:ビデオを見る
ステップ2:液体を選択する <図>
 <図>
<図>  <図>
<図> 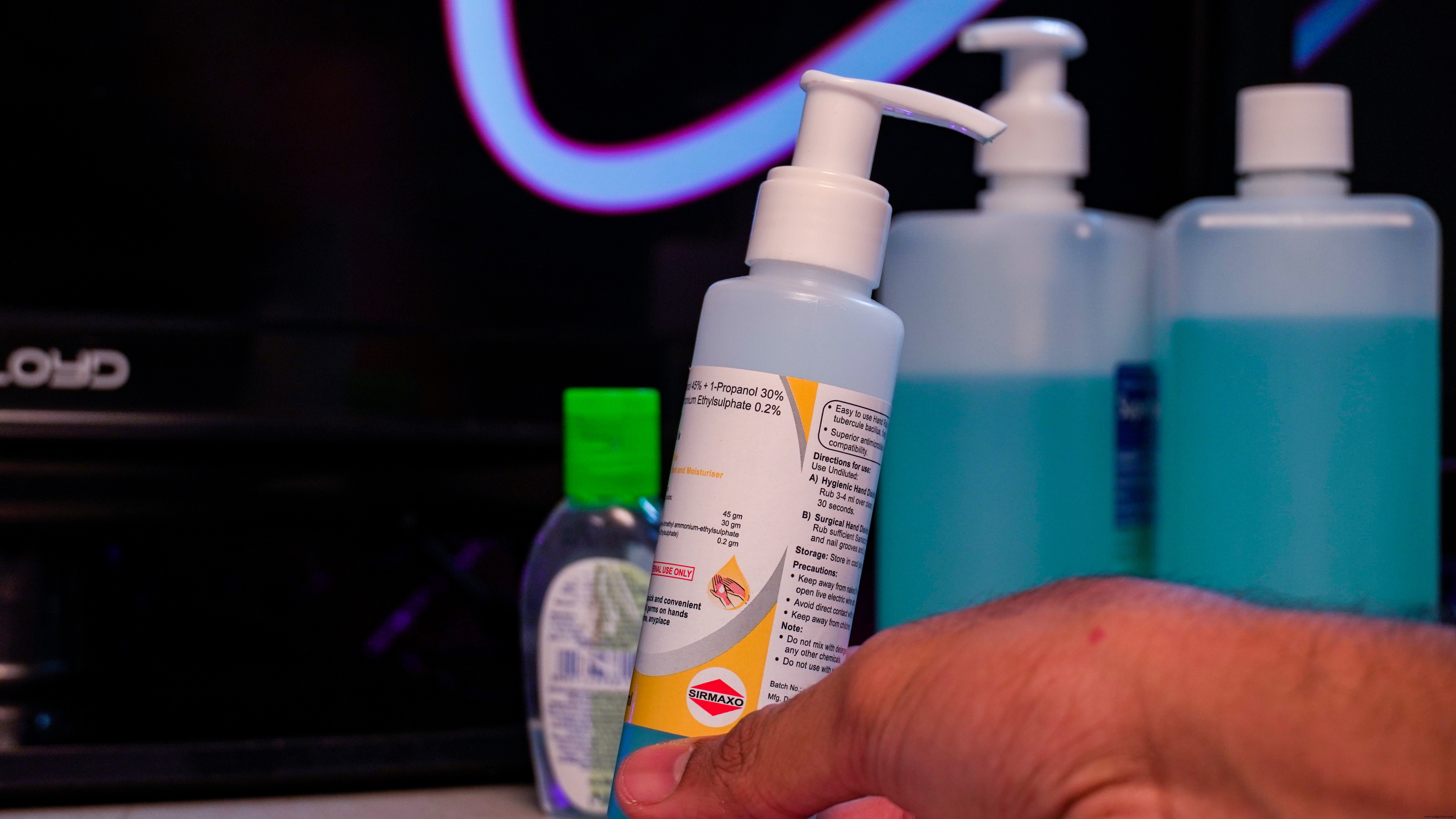
このビルドに必要な最初の最も重要なものは、W.H.O。によって提案されているように、アルコールベースのハンドラブまたはハンドサニタイザーまたはハンドウォッシュです。 (世界保健機関)詳細については、こちらをご覧ください。
このビルドでは、適切な種類のディスペンサーを入手することが非常に重要です。メカニズム全体を印刷するのではなく、ディスペンサーを作成するだけなので、ディスペンサーまたはプッシュタイプのボトルでアルコールまたは手でこする必要があります。
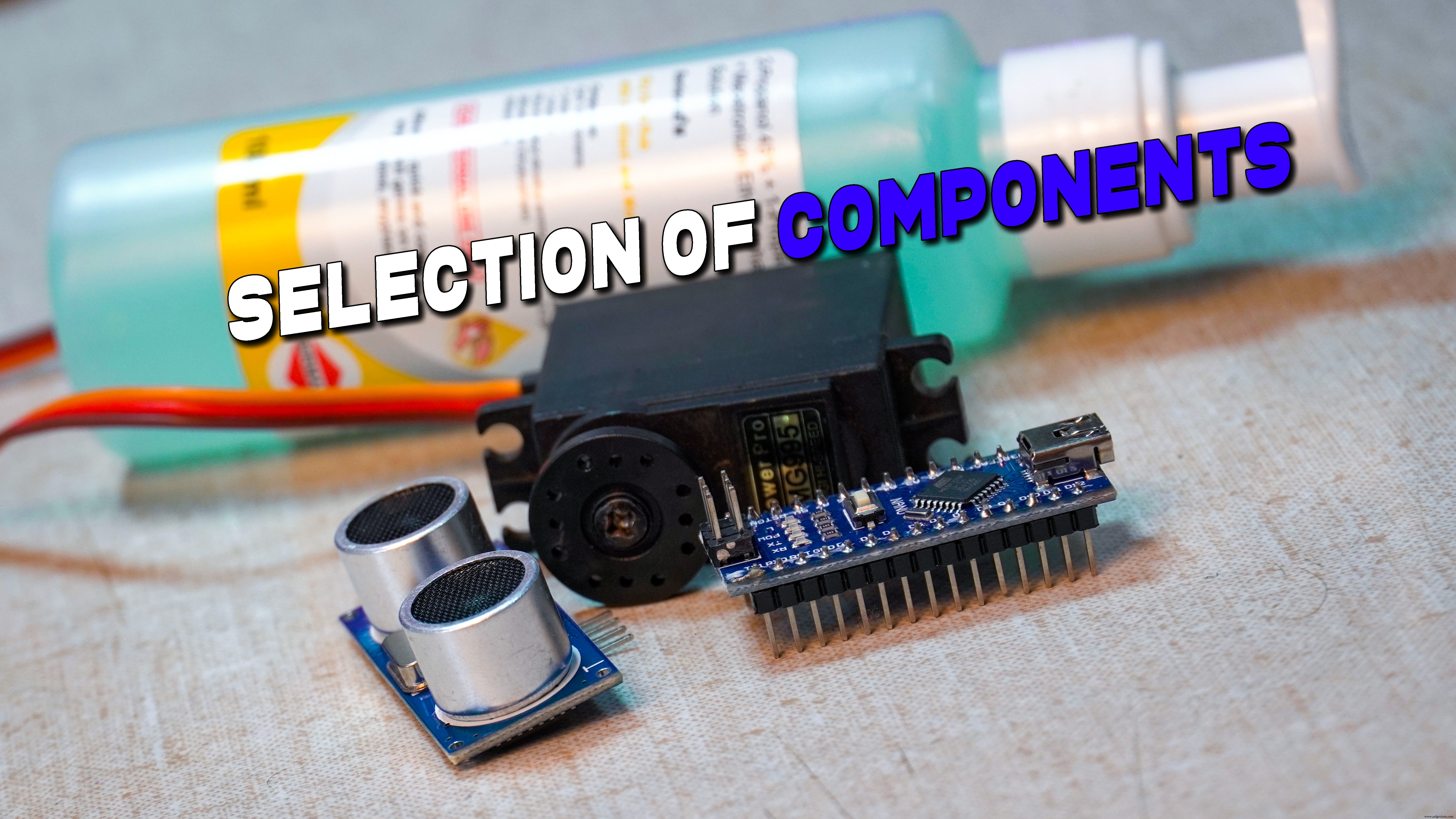
ステップ3:コンポーネントの選択 <図>
 <図>
<図> 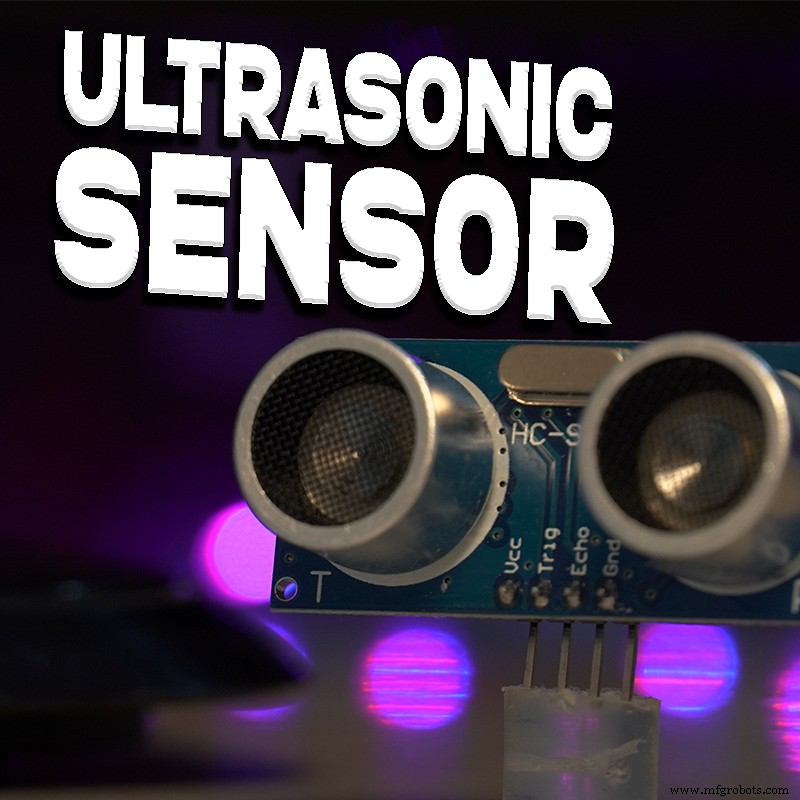 <図>
<図> 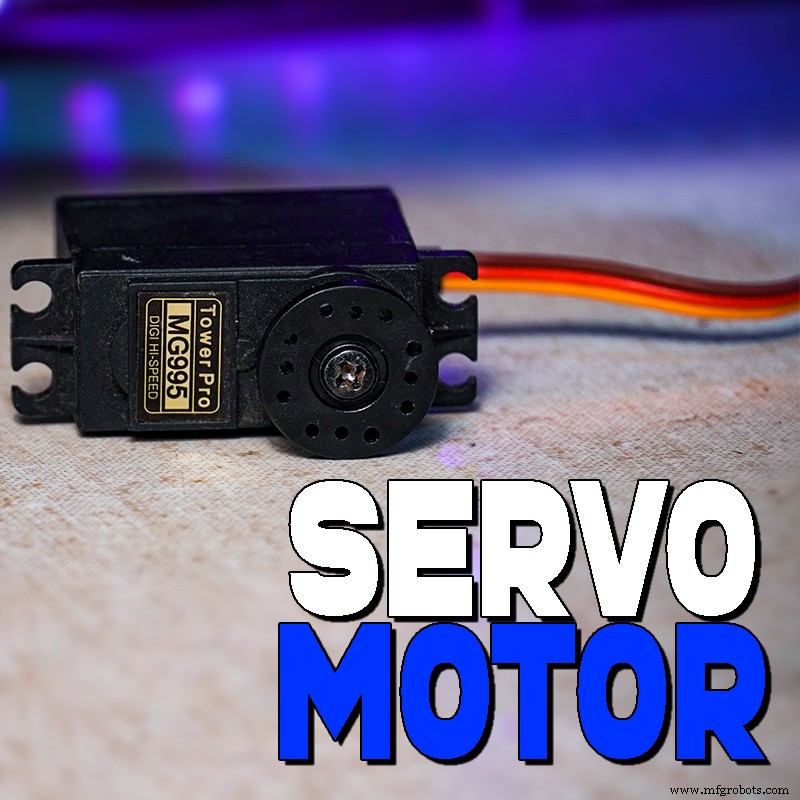 <図>
<図>  <図>
<図> 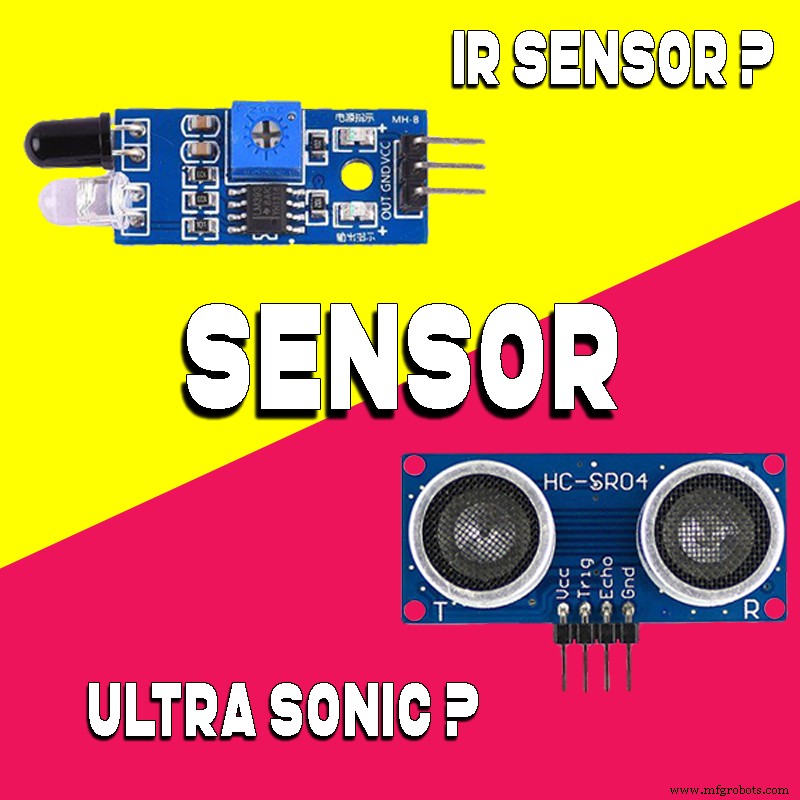 <図>
<図> 
センサー:
基本的にこのシステムのトリガーまたはタッチレススイッチとして機能するセンサーが、近接または存在を感知するために必要になります。ここでは2つの選択肢があります。つまり、IRセンサーモジュールまたは超音波センサーモジュールのいずれかを使用できます。基本的に安価で効率的なオプションであるが不正確な場合があるIRセンサーモジュールを使用することも、2cm以上の範囲で非常に正確でわずかに高価なオプションであるHC-SR04超音波センサーを使用することもできますが、超音波センサーを使用しますこのチュートリアルでは、精度を高めるために。
モーター:
モーションまたは処理 出力 、ポンプのいずれかが必要になる場合があります 、モーター 、または電気信号をディスペンサーを介したアルコールベースの手指消毒剤または消毒剤の機械的変位に変換する電子部品の場合、最大トルクを得るために金属ギア付きのサーボモーターを使用するのが最善の選択です。マイクロポンプはコンテナに挿入されるため、マイクロポンプの使用は避けます。これにより、再び脆弱な封じ込めスポットが作成されます。したがって、サーボの助けを借りて外部メカニズムを使用することは賢明な選択です。
マイクロコントローラー:
このプロジェクトのビルドには、マイクロコントローラーが必要です。 制御 入力 および出力 、距離またはセンスを計算します トリガー センサーから出力を処理し、この例ではサーボスイープの形式で出力を処理します。この例では、任意のarduinoを使用できます。これにより、パラメーターの調整、出力の微調整が簡単になり、任意のArduinoを使用できるようになります。ここでは、ArduinoNanoを使用します。ワークケース。
ステップ4:メカニズムを理解する <図>
 <図>
<図> 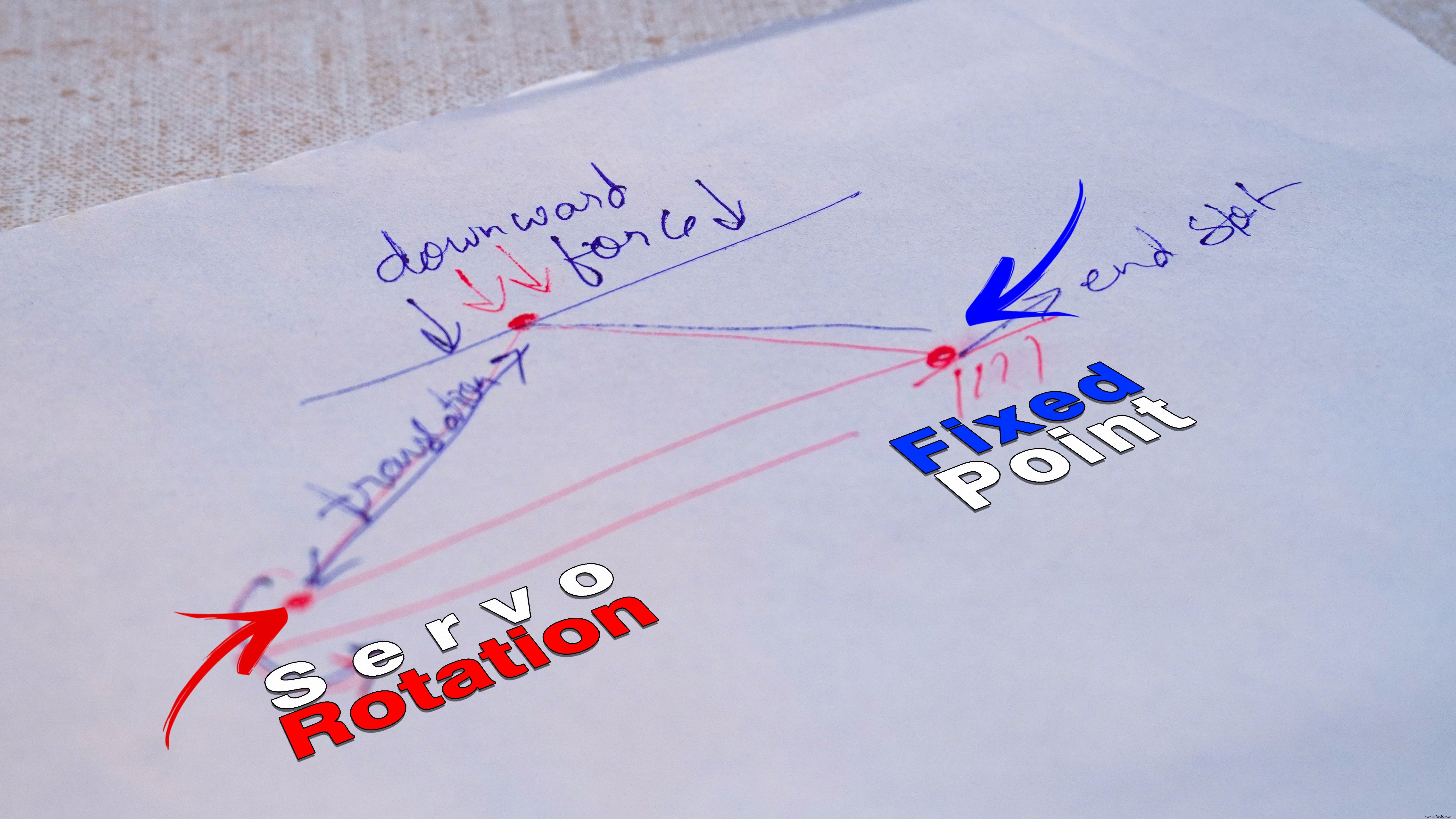
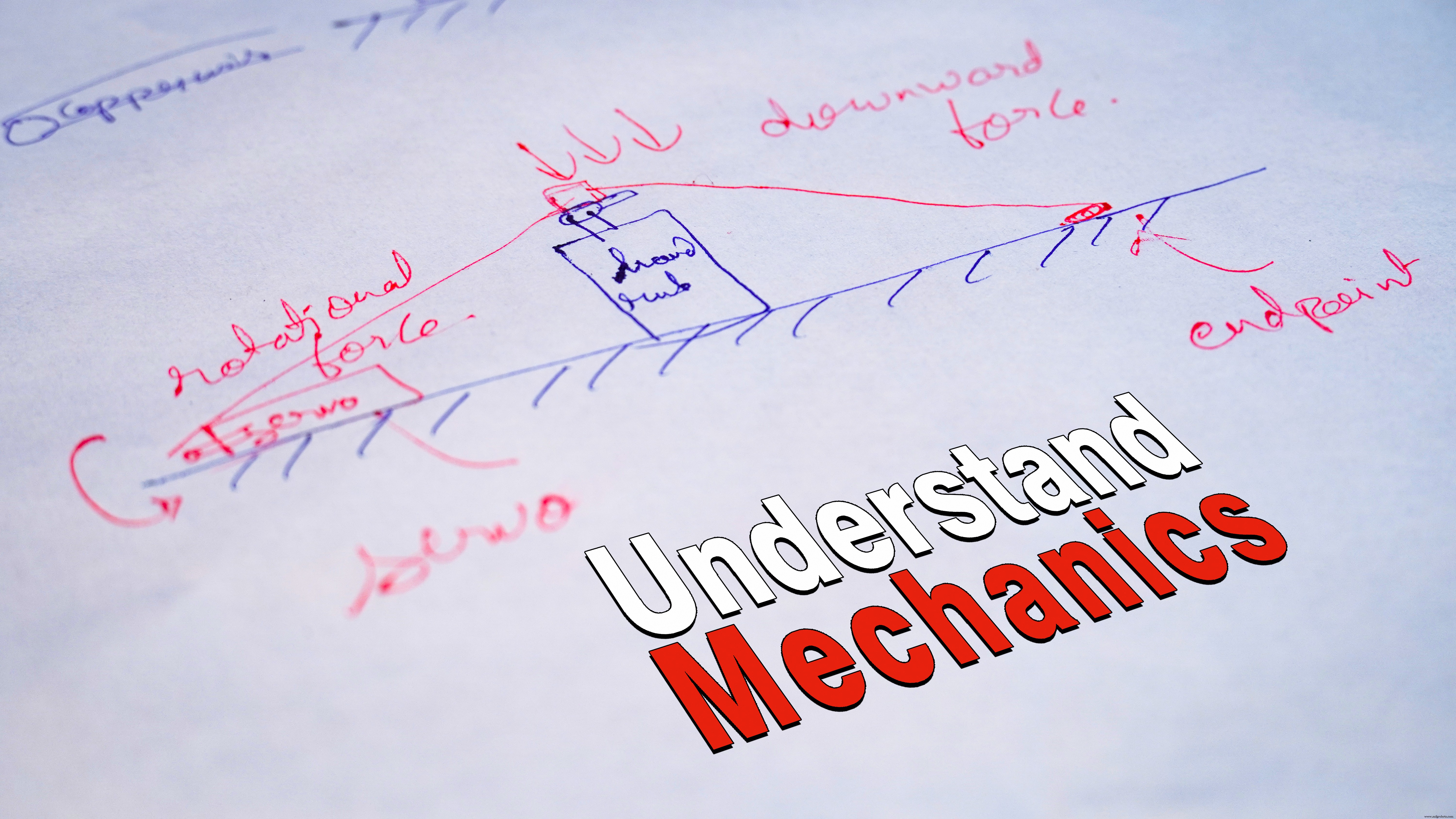
作り始める前に、機械的な配置を理解しましょう。 メカニズムが必要になります これにより、ノズルを押し下げる力が作成されます。 円運動をするサーボモーターを使用しているので、それだけでは下向きの力を発生させることはできません。それを実現するには、何らかの機械的配置が必要です。一方の端を固定するためにプーリーメカニズムを使用します。回転力をプッシュに変換します。銅線を使用して伝達用の下向きベクトル力を作成します。基本的には、サーボの円力を下向き作用力ベクトルに変換して、プッシュをシミュレートします。しかし、これはすべて複雑に聞こえるので、次の手順に従って、このタスクを少しずつ実行してみましょう
ステップ5:接続 <図>
 <図>
<図> 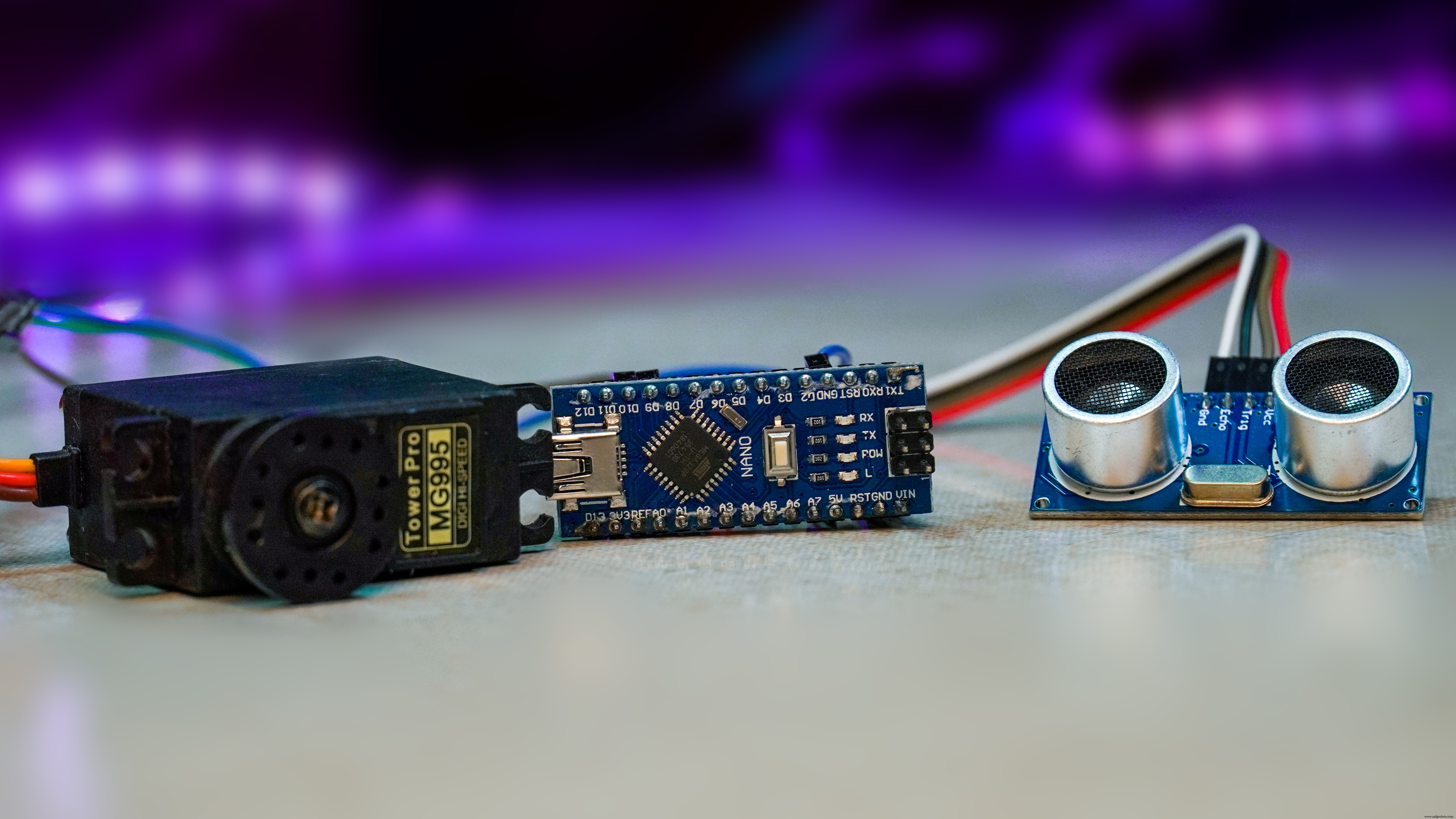 <図>
<図> 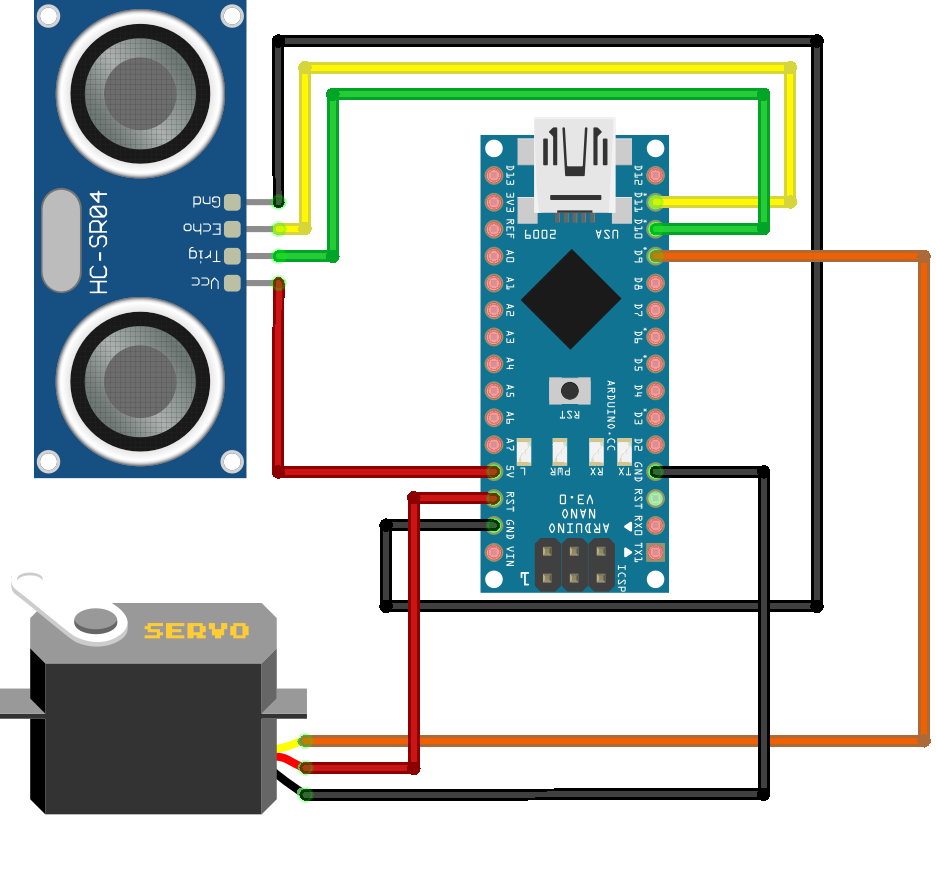
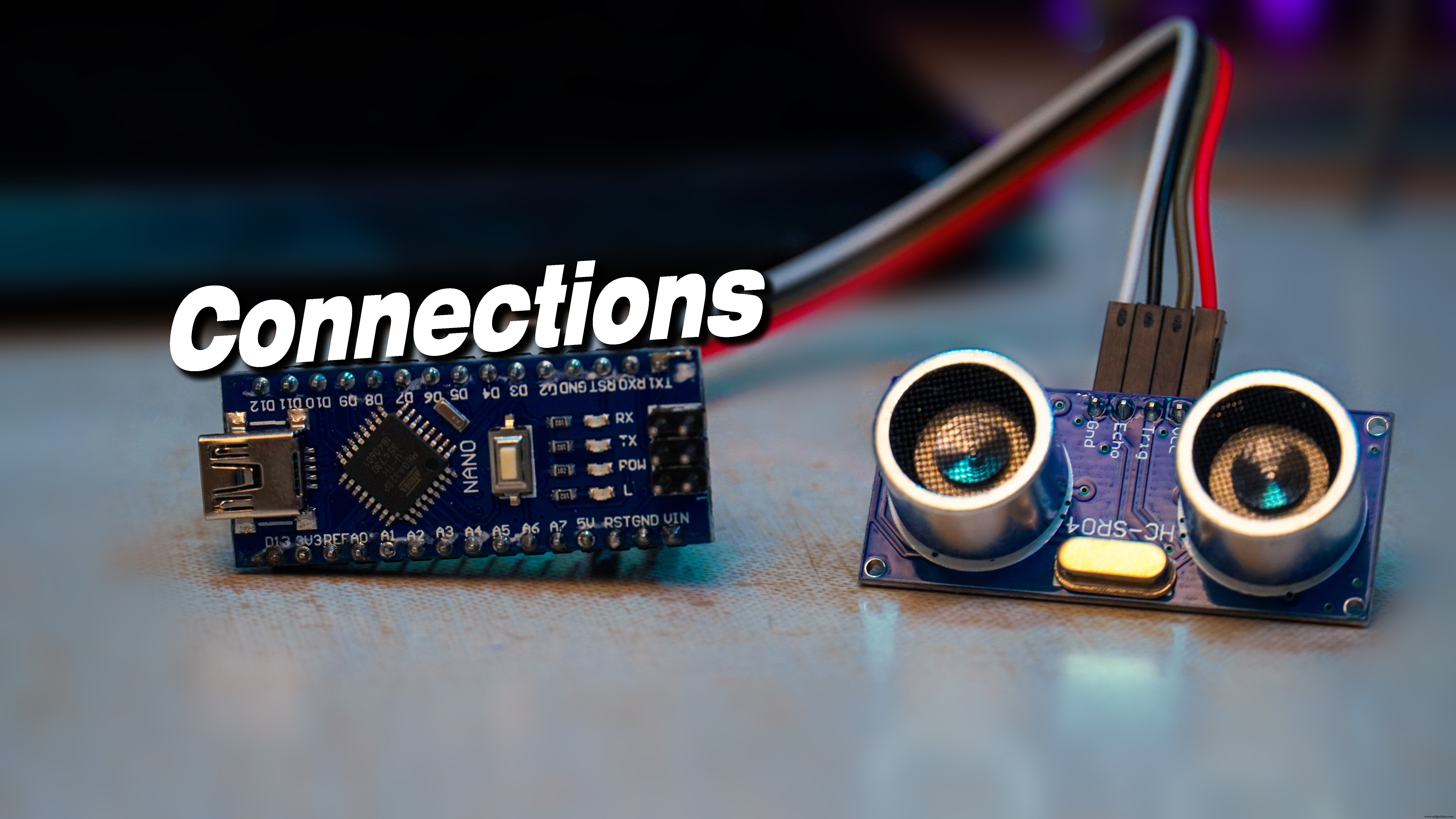
このビルドの接続は非常に簡単です!
Arduinoへのセンサー:
D10をトリガーする
D11にエコー
VccからVcc
Gnd to Gnd
サーボからArduinoへ:
D9への信号
VccからVin
Gnd to Gnd
(参照できます この投稿 超音波の基本と動作について コンポーネントについてはwww.utsource.netもチェックアウトしてください)
Connections.fzz
ステップ6:サーボをベースに接続する <図>
 <図>
<図>  <図>
<図>  <図>
<図> 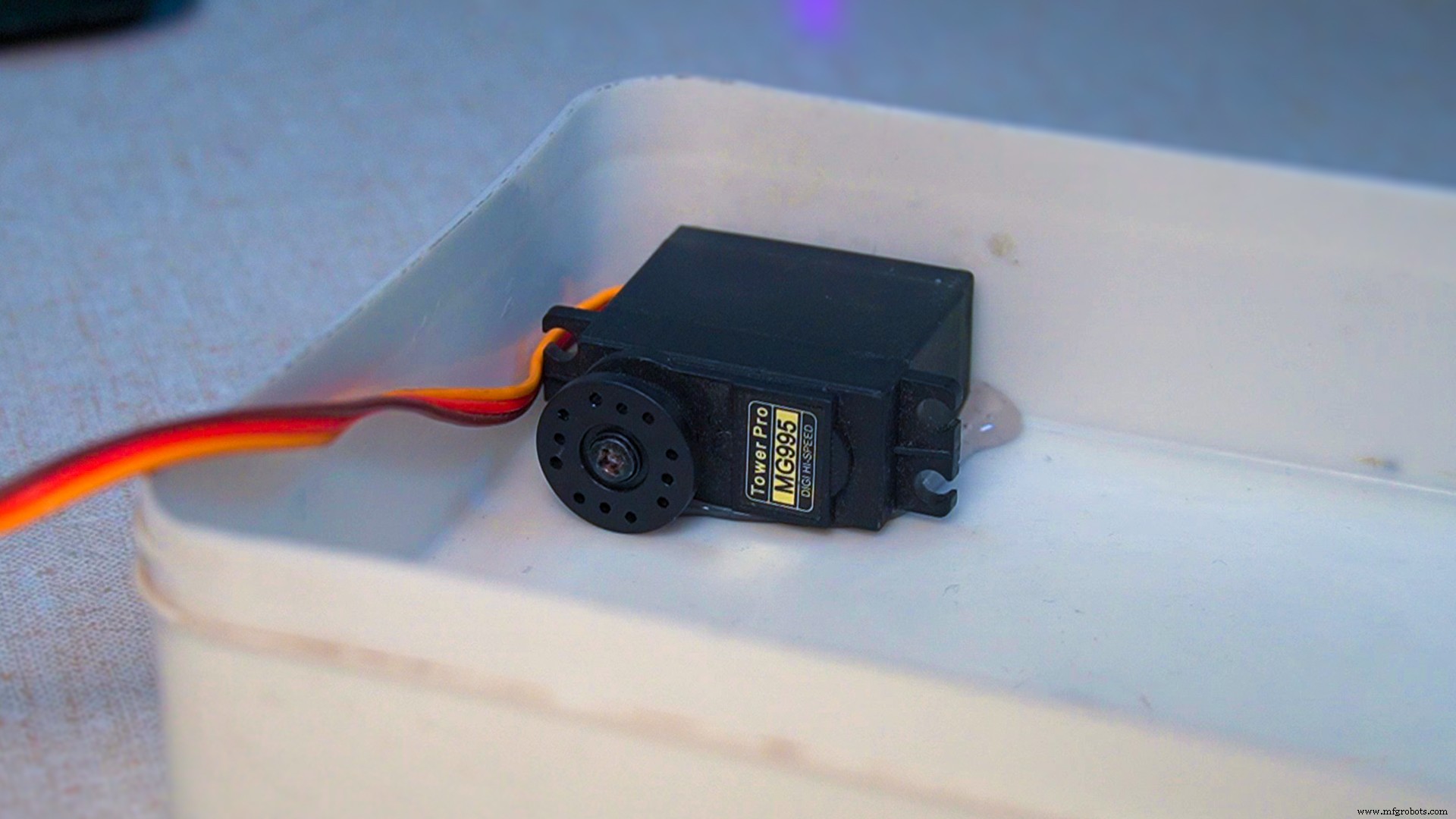
機械的配置の最初のステップは、ホットグルーを使用して、ボックス内の1つの剛性のある表面にサーボモーターを取り付けることです
(ホットグルーを使用するときは注意してください)
ステップ7:銅線をサーボアームに通します <図>
 <図>
<図> 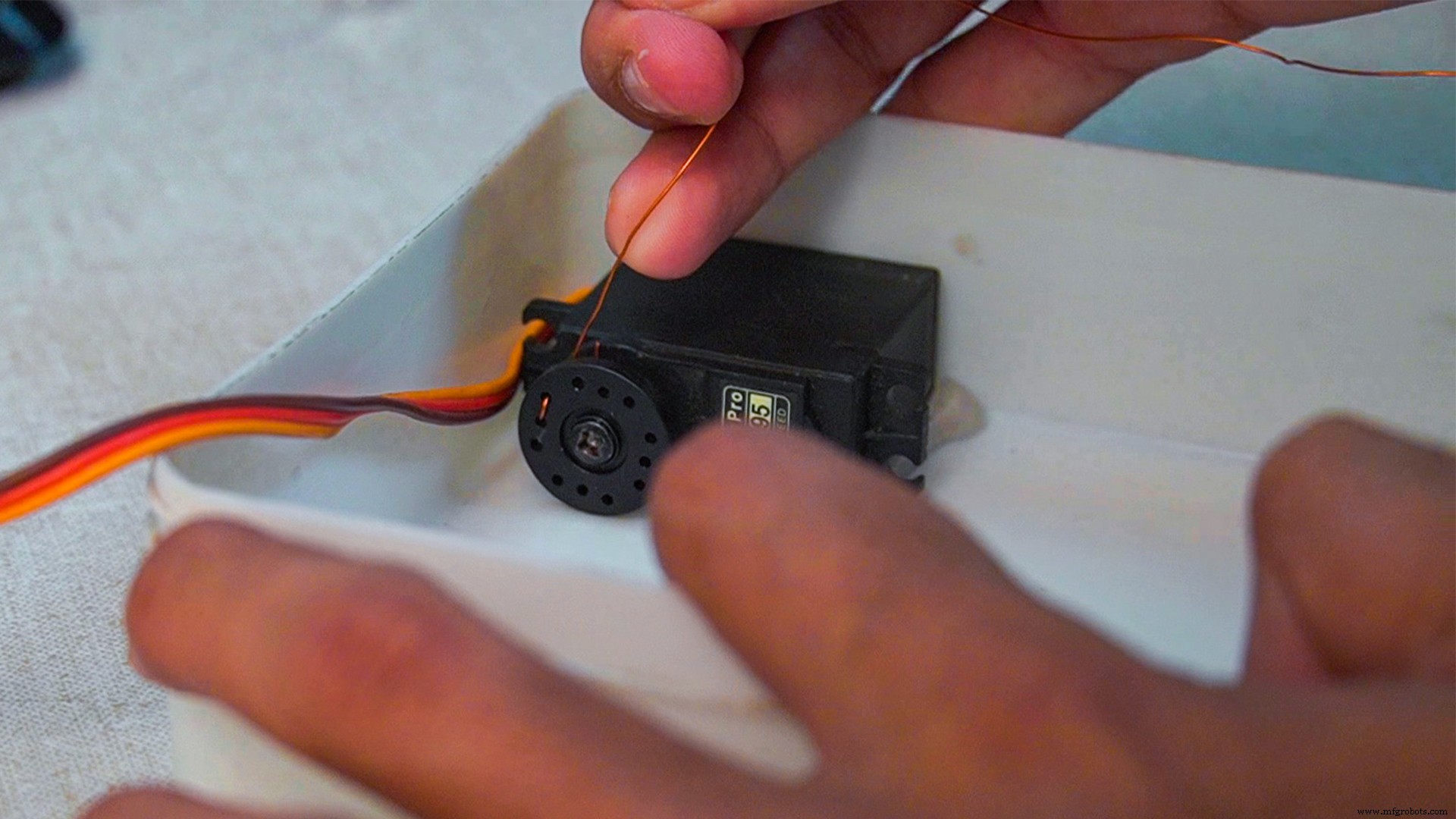
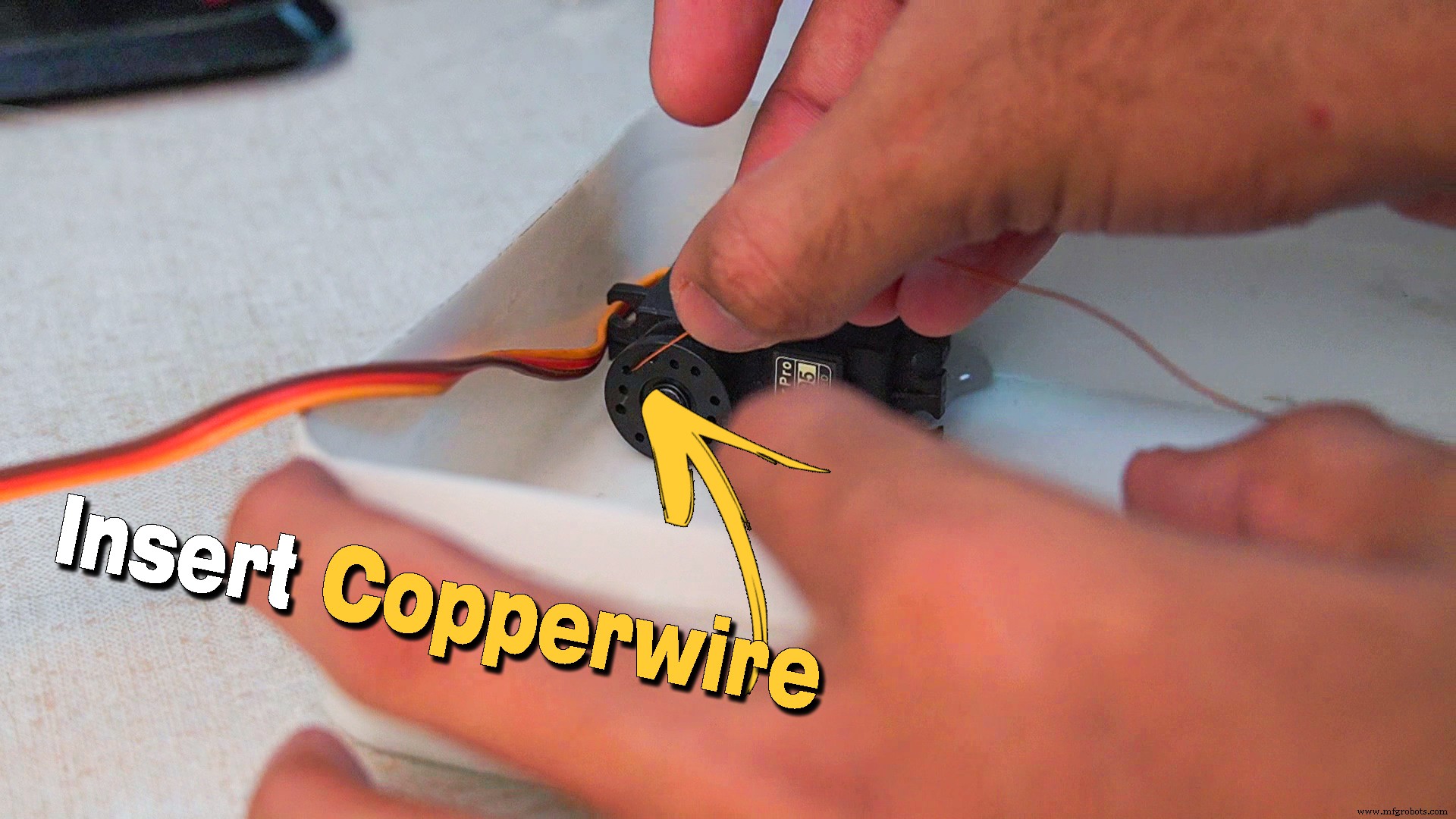
合格 銅線スルー アタッチメントアームの穴を使用するサーボモーターは、少なくとも2つの穴を通過させて、円形のアタッチメントアームを使用して適切な張力が得られるようにすることをお勧めします。これは、まっすぐなものがエンクロージャー内に引っかかる可能性があるためです。
ステップ8:真ん中に穴の開いたホットグルースティックを追加する <図>
 <図>
<図>  <図>
<図>  <図>
<図> 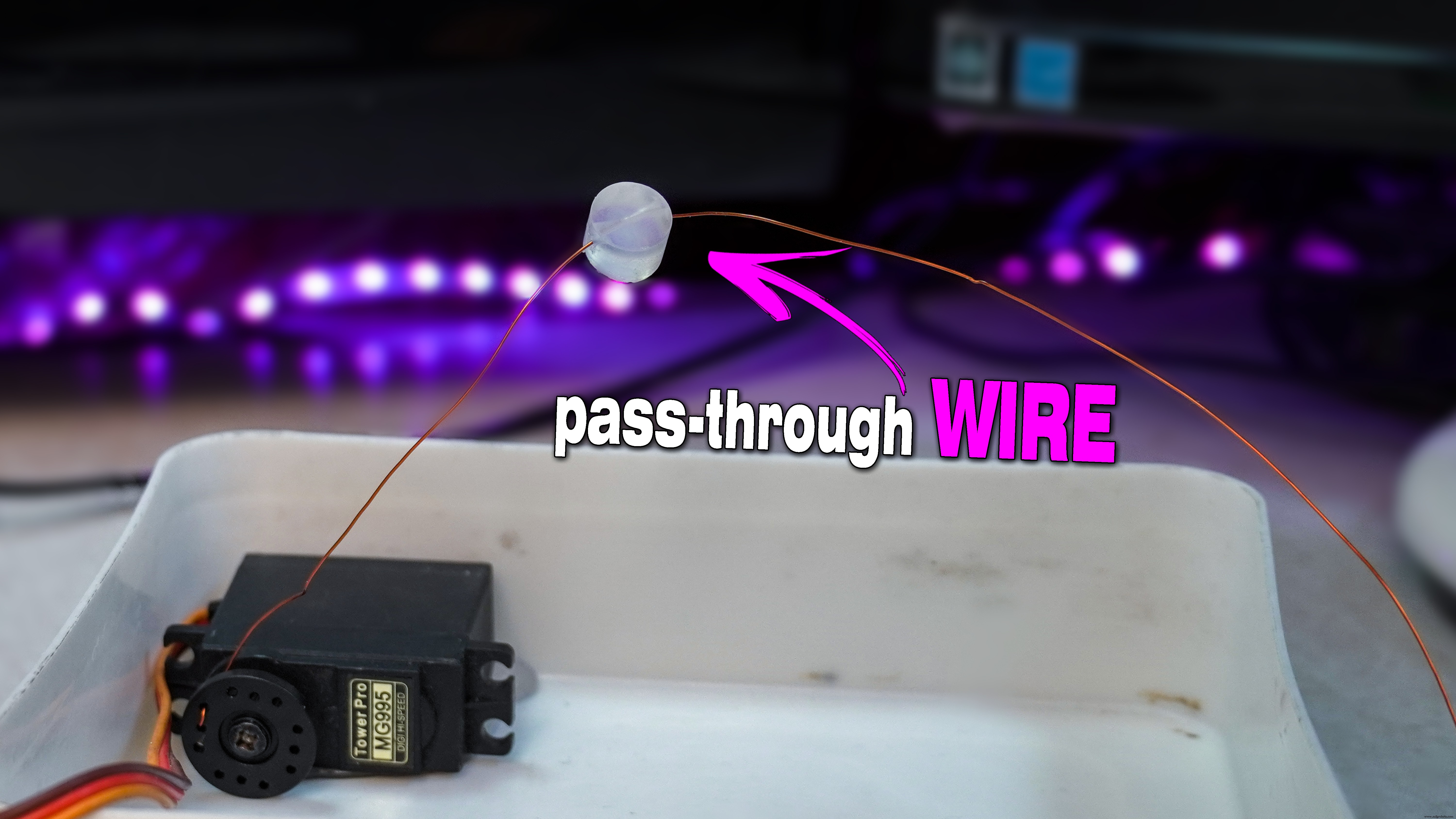 <図>
<図> 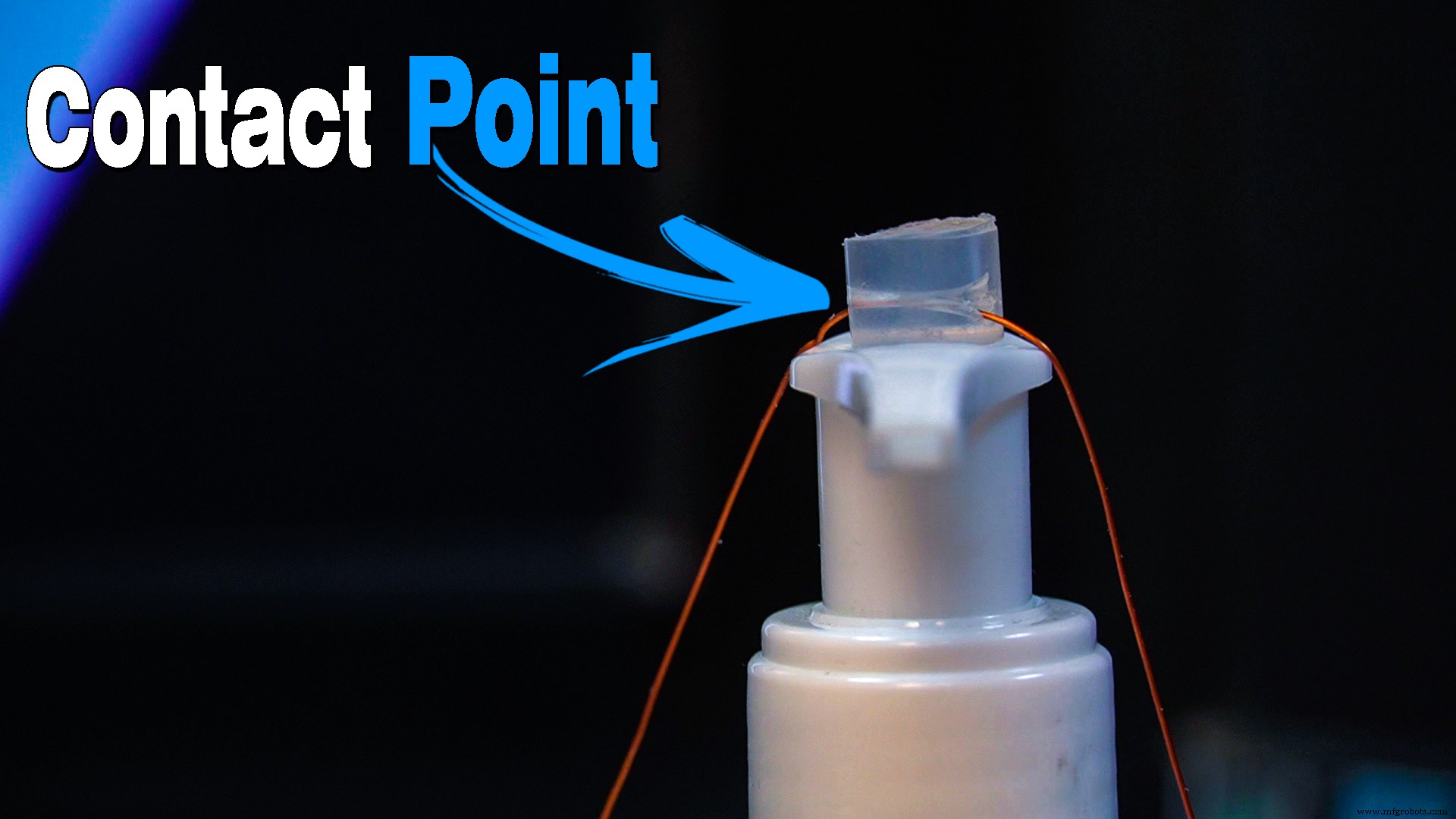
カット 約 2cm ホットグルースティックの長い部分 と穴を開ける 真ん中で、銅線をホットグルースティックに通します。これは、接触点の表面積を増やすのに役立ちます。
ステップ9:エンドスクリュー <図>
 <図>
<図> 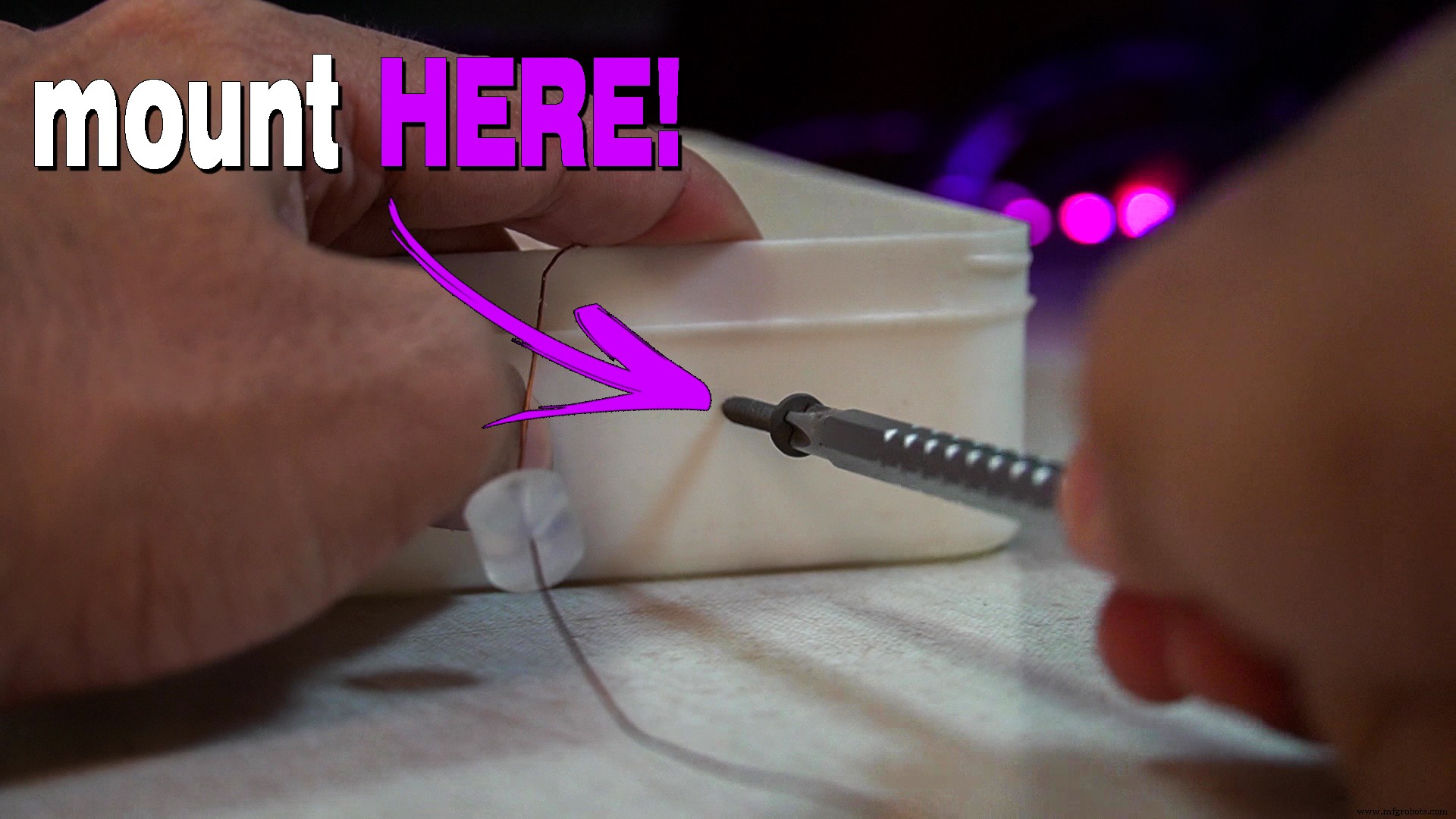 <図>
<図> 
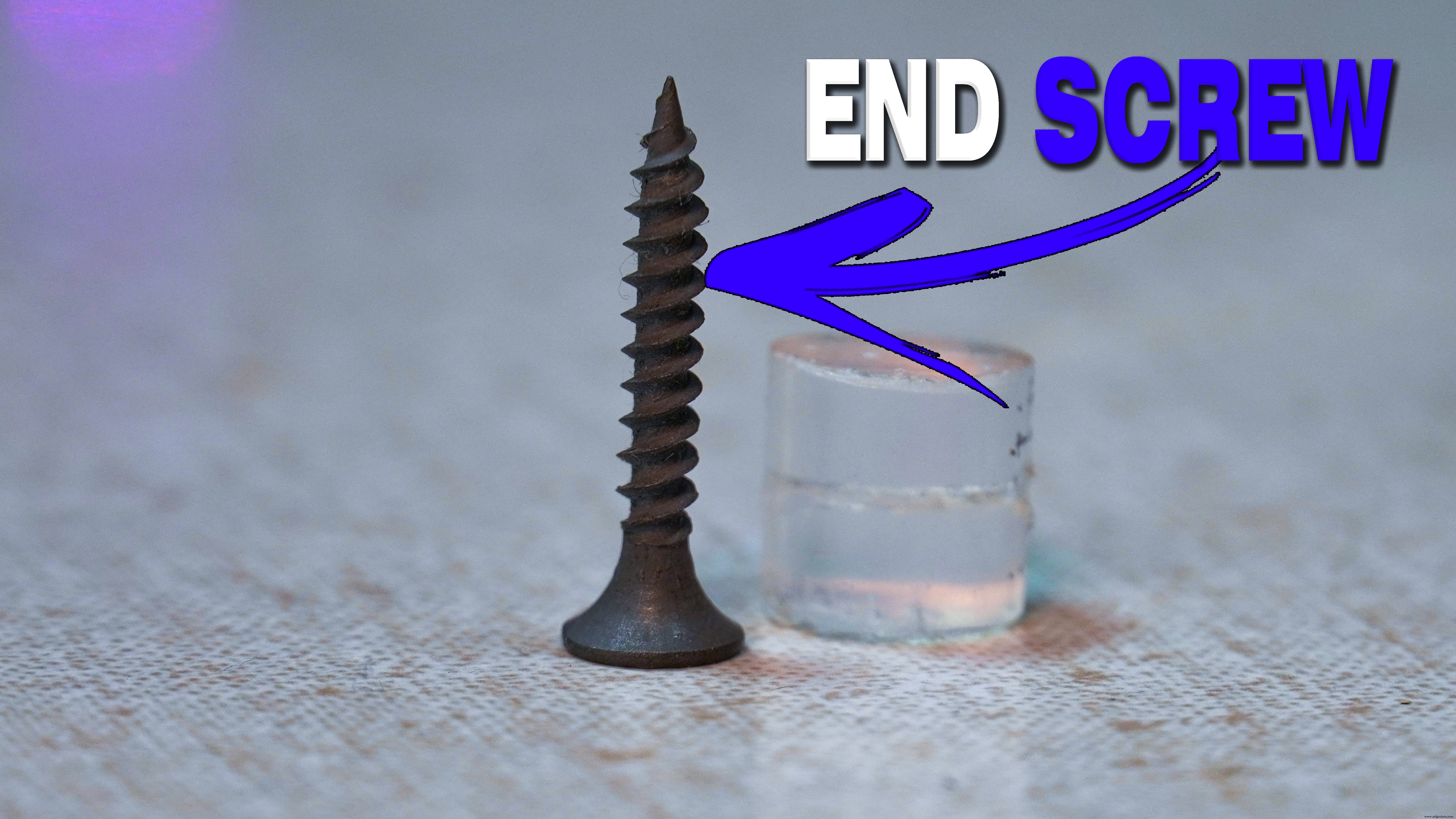
添付 2番目のワイヤーの端 別の剛性のある表面(サーボモーターの反対側の面)に、 を使用して セルフスレッディングネジ または、ここの釘は、張力を調整したり、詰め替えのためにボトルを取り外したりできるので、万力の選択になります。
ステップ10:コードをアップロードする <図>
 <図>
<図> 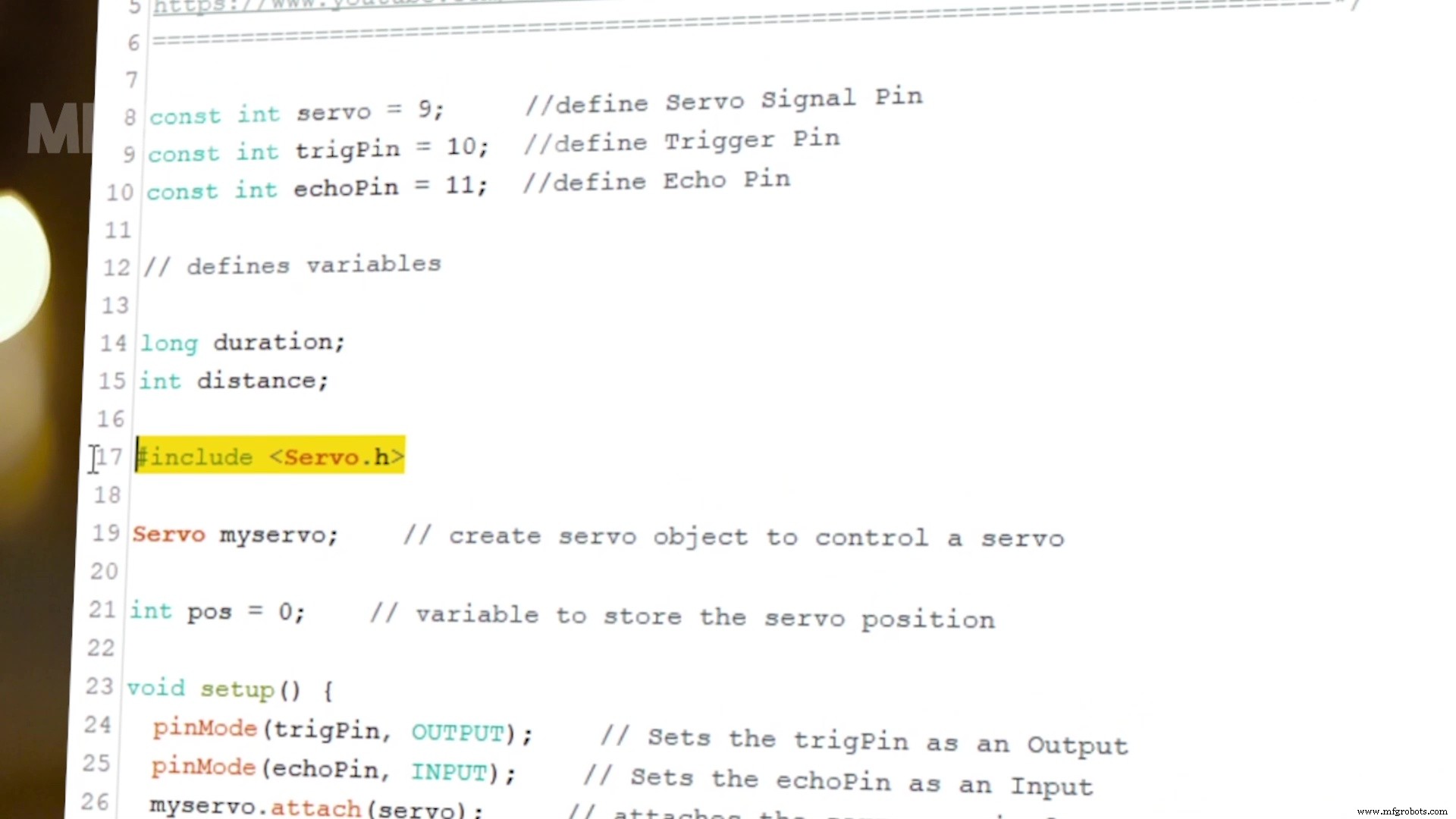 <図>
<図> 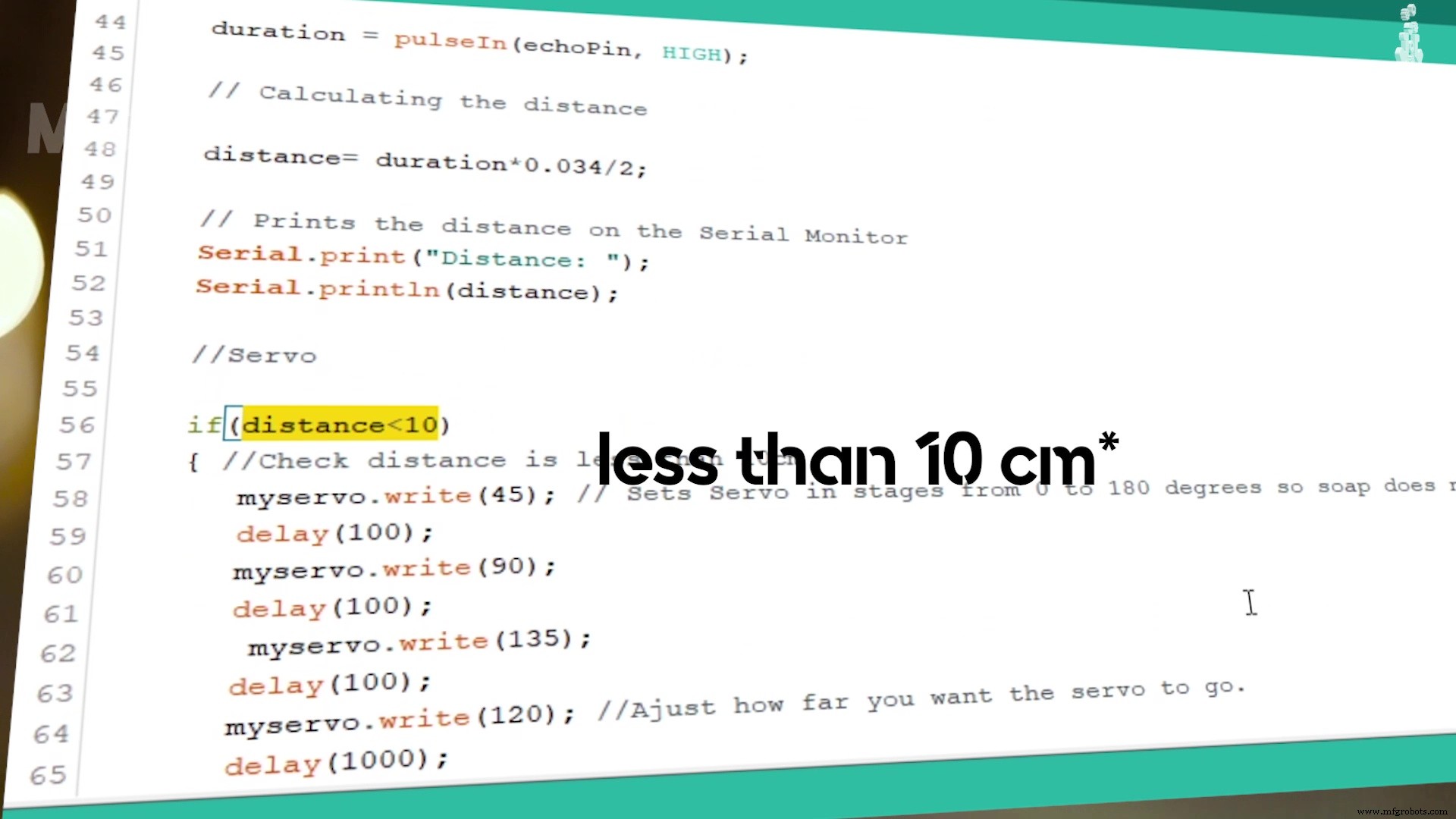
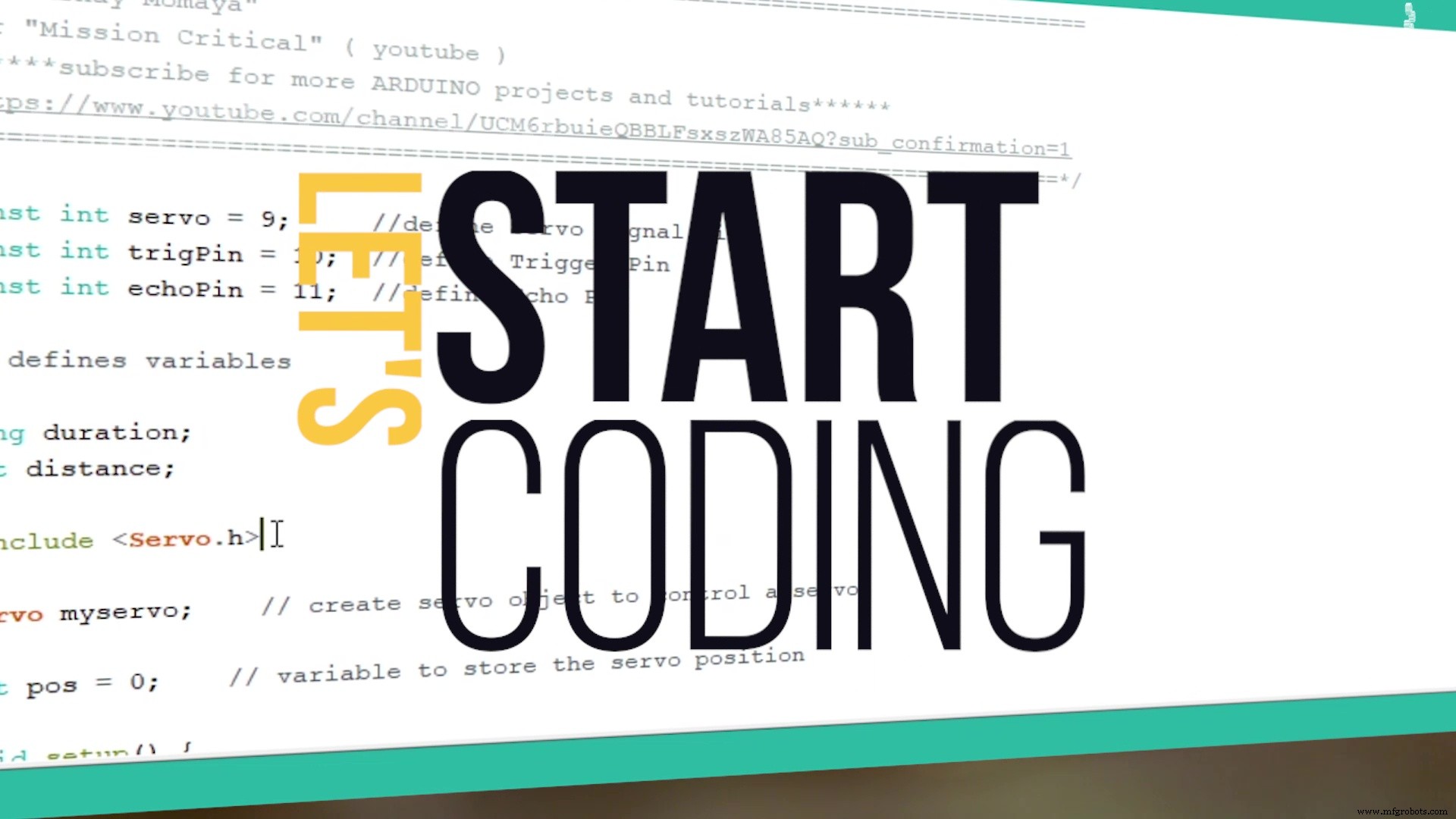
理論的には、私たちのアイデアは完璧に聞こえます。このArduinoをコーディングして、実際の世界でテストしてみましょう。
コードは非常に理解しやすく、サーボライブラリを使用しました 、および定義された基本設定 および変数の場合、メインコードは計算するようなものです。 距離 センチメートル および if 距離は 10cm未満です サーボ モーターはスイープを実行します 液体を放出する動き。
サーボ用のライブラリはここにあります。
コードの更新はほとんどありません。ここでコードを見つけてくださいhttps://minov.in/diy-hand-sanitizer-dispenser-using-arduino/ このステップではコードが添付されています(上記からコードをコピーしても機能しない場合があるため、ダウンロードしてください から https://minov.in/diy-hand-sanitizer-dispenser-using-arduino/ )
ステップ11:テスト <図>
 <図>
<図> 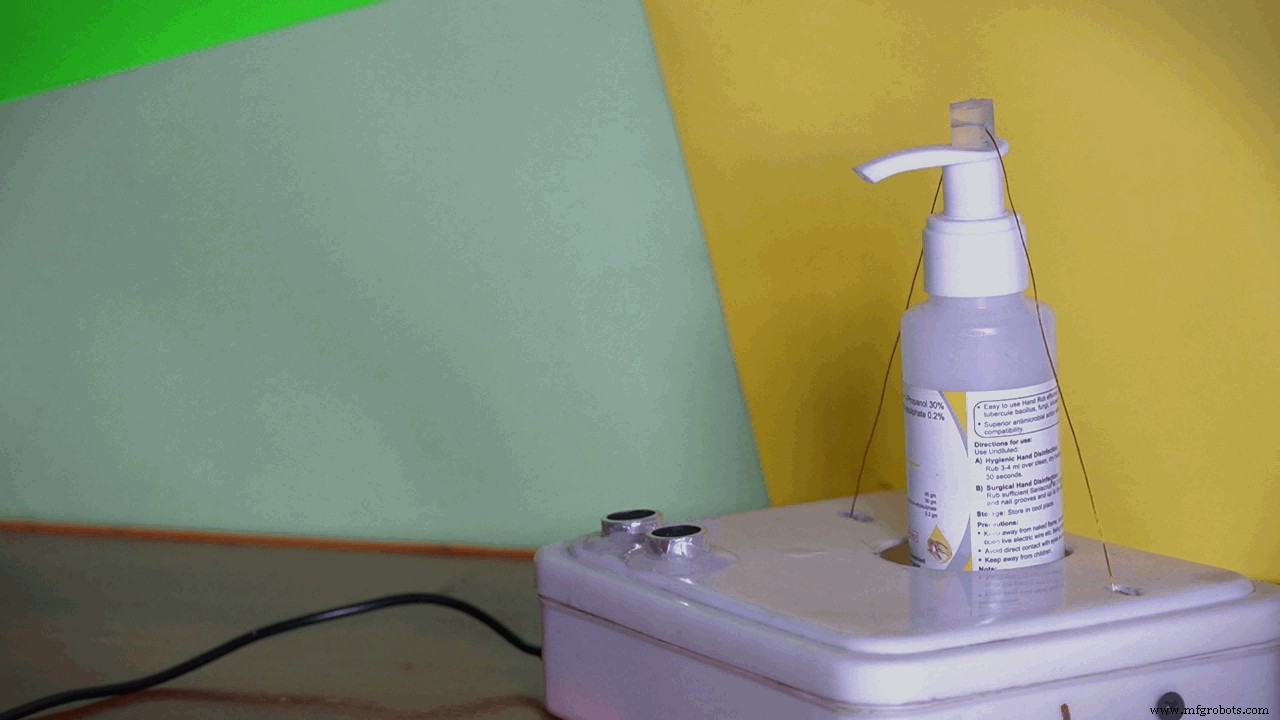
コードがアップロードされたら、テストすることをお勧めします。 このエンクロージャーを完成させる前に、このプロジェクトを実行してください。
このテストで 手がいつかはっきりとわかります センサーの上に配置されます 超音波が10cmを下回る場合の距離、サーボ モーターが作動しています アルコールの手でこすります。
プロジェクトが適切に機能したら、次のステップに進むことができます!
ステップ12:エンクロージャーを完成させる <図>
 <図>
<図> 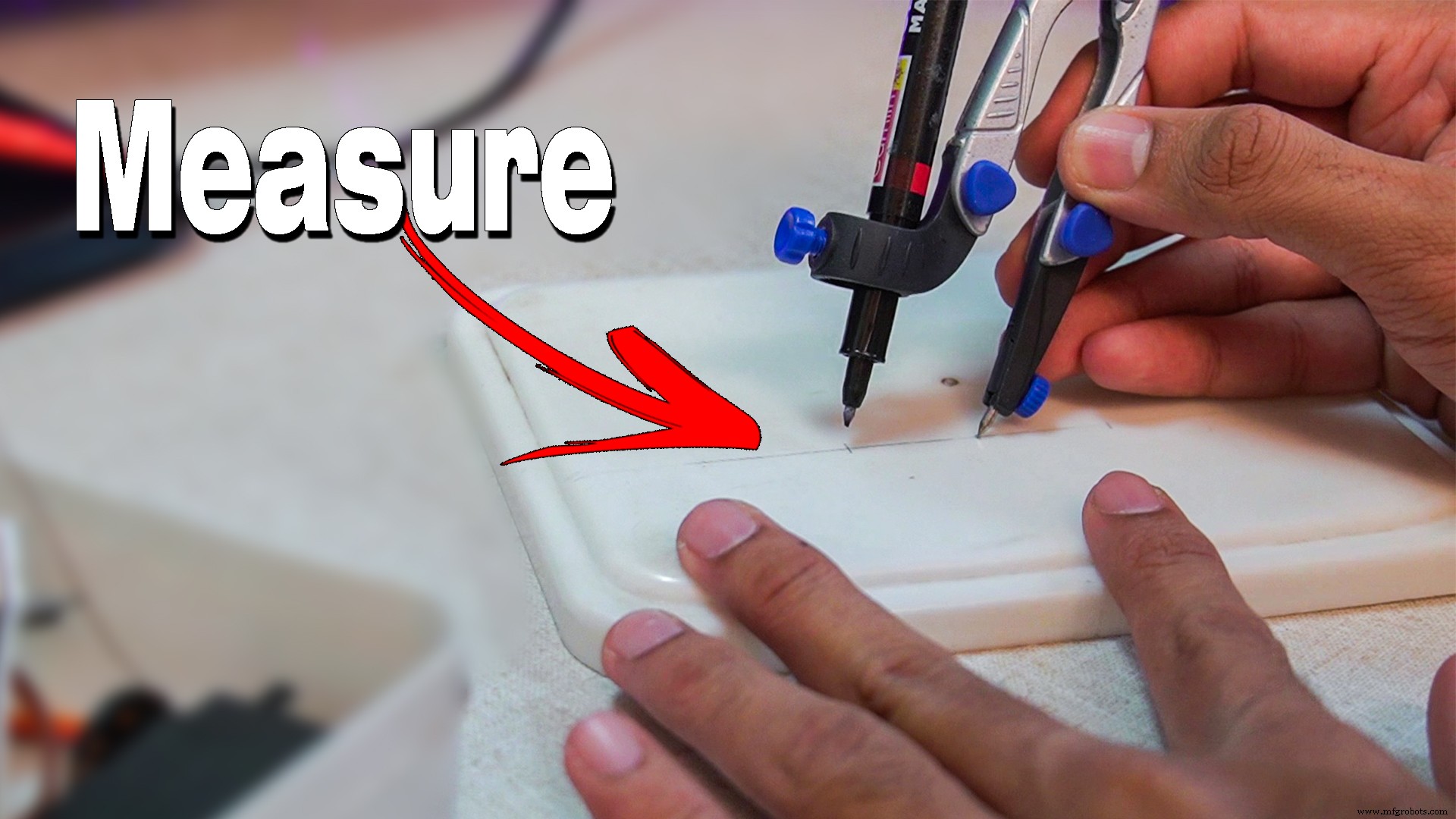 <図>
<図> 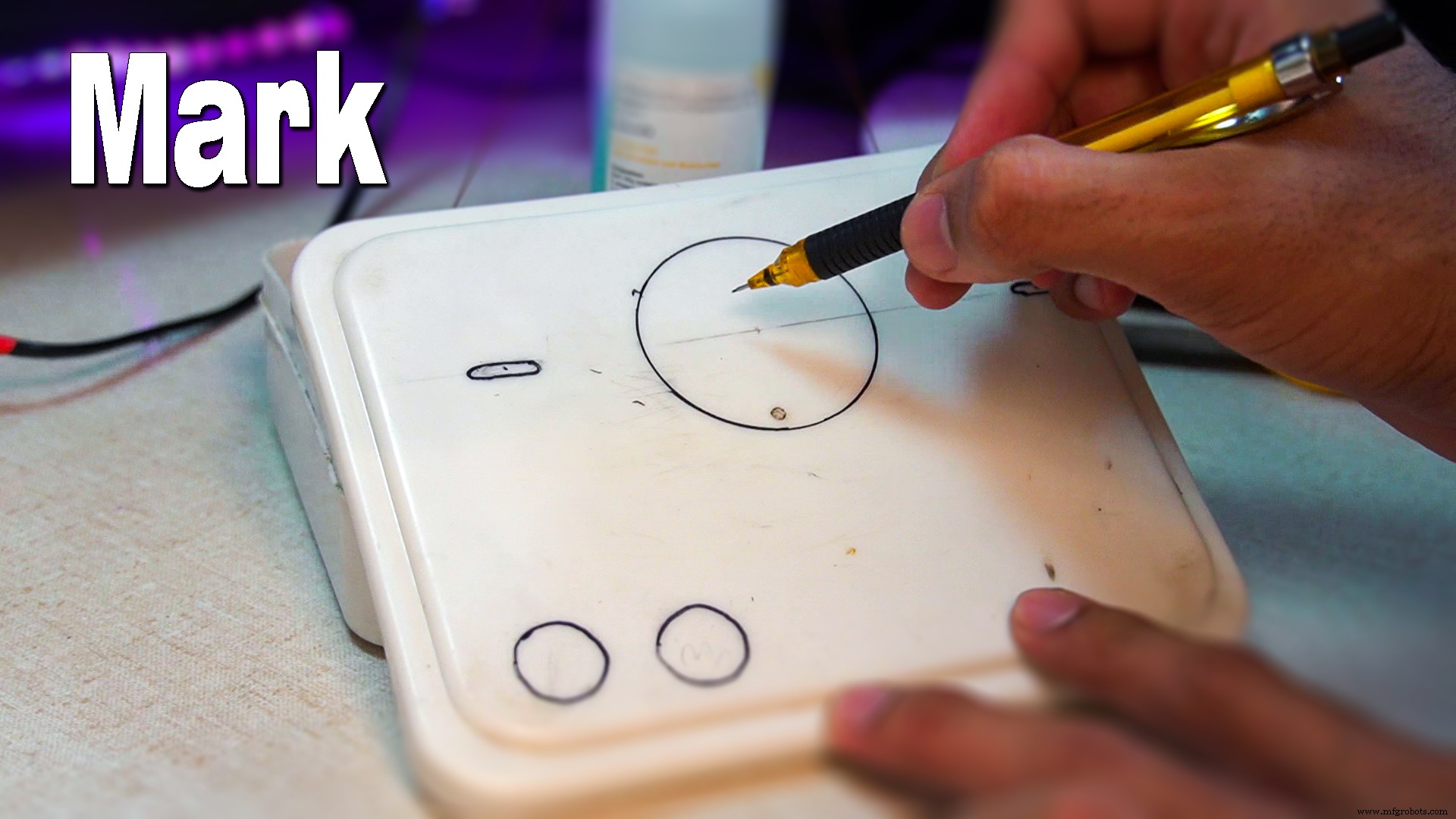 <図>
<図> 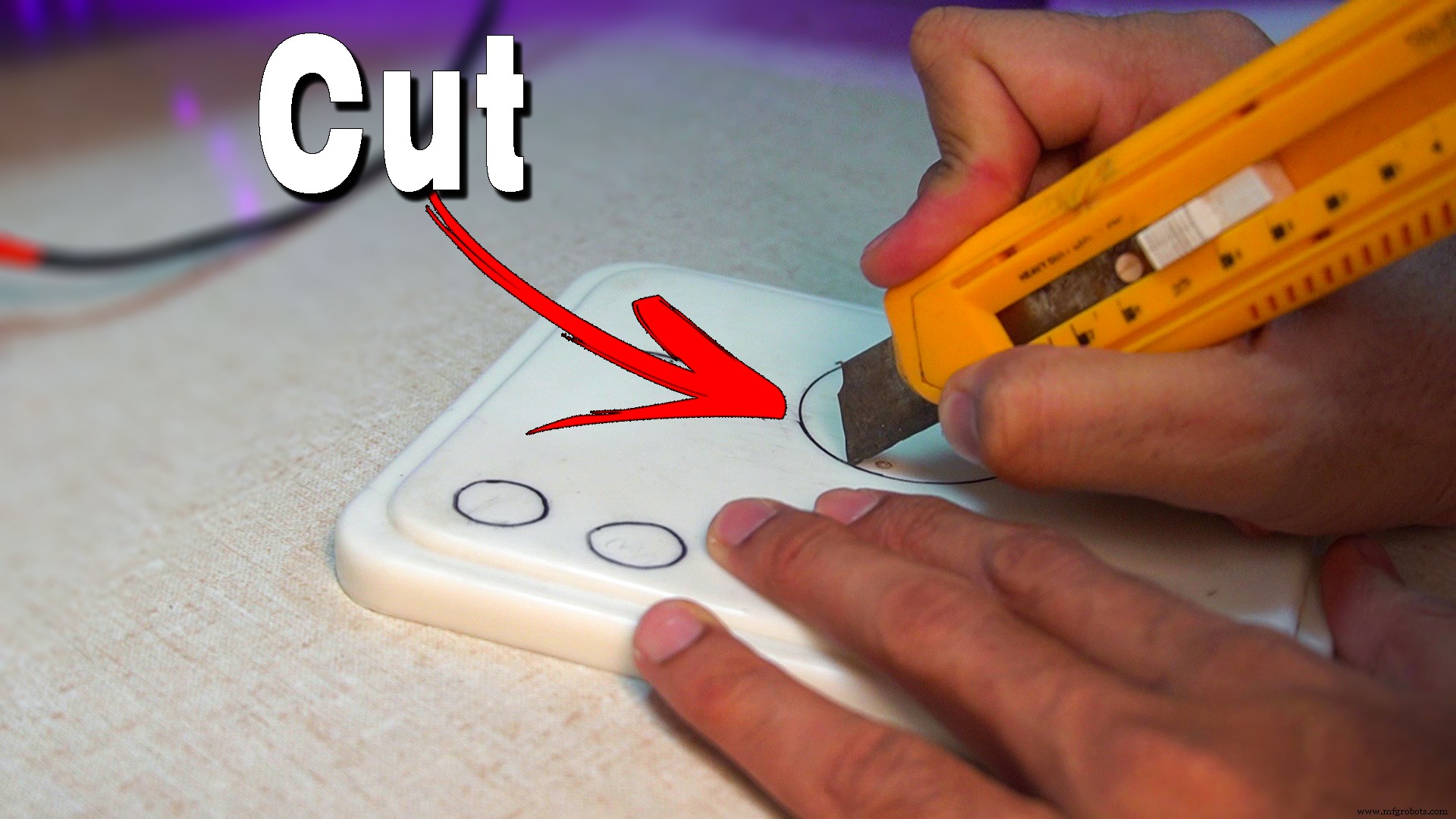 <図>
<図> 
プロジェクトが機能しているように見えたら、エンクロージャーを完成させます。
手順に従って完了します:
- 超音波センサーの寸法とボトルの穴を測定します。
- モーメント用の余裕を持って銅線用のスロットを作成します。
- すべてのカッティングホールに印を付けます。
- シャープブレードまたはドリルを使用して穴をプロットします。
- ホットグルーを使用してすべてを修正します。
そしてついにこのプロジェクトが実現しました。
ステップ13:すべて設定しました! <図>
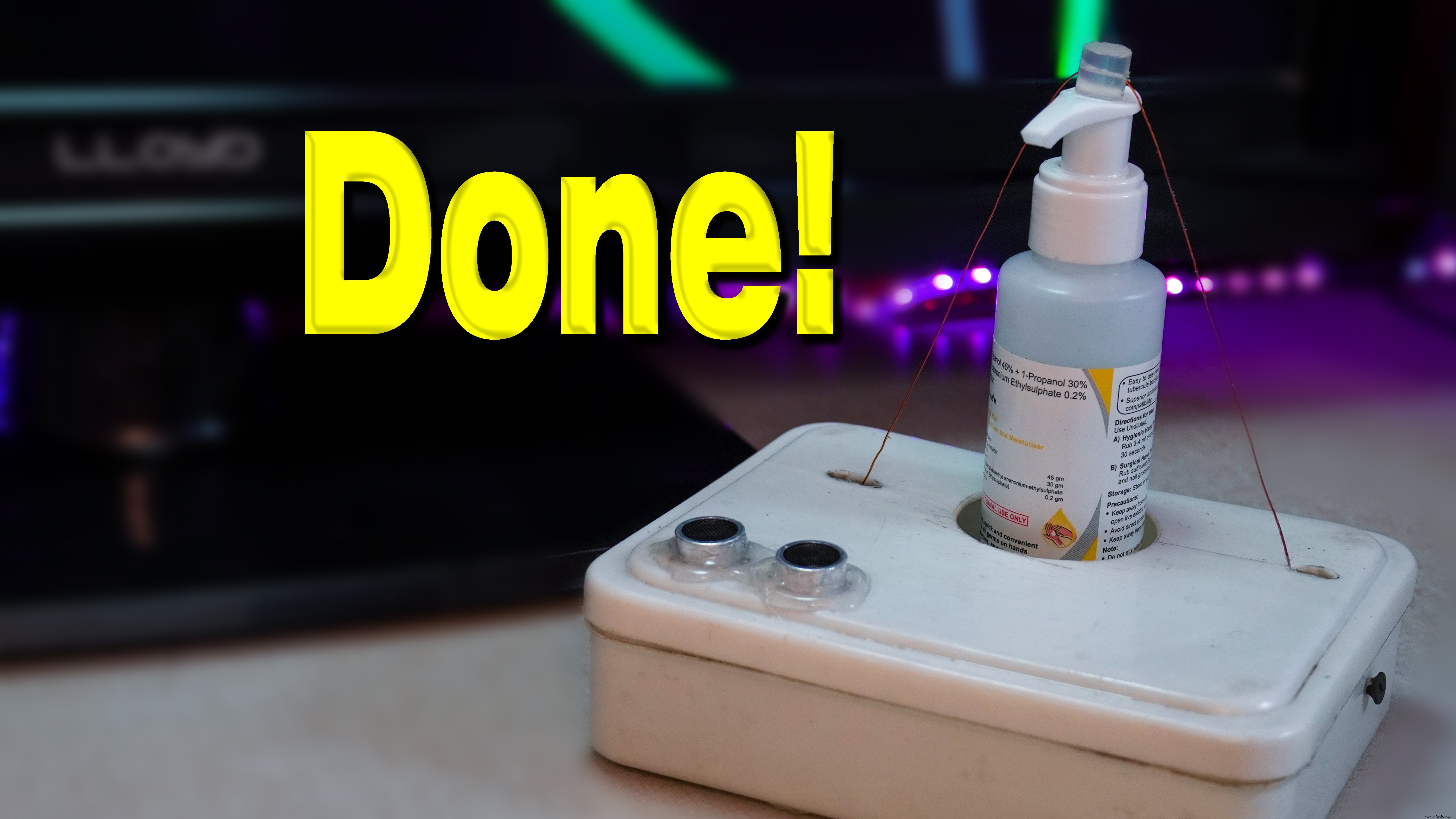
最後に、このプロジェクトが完了しました!
ステップ14:寄付してください! <図>

このプロジェクトで使用されるパーツのほとんどは多くの人にとって便利なので、このプロジェクトを作成して寄付することを皆さんにお願いします。 病院へ または困っている人なら、私はこのプロジェクトをエッセンシャルワーカーに個人的に寄付しています。このビデオをエンジニアの友達全員と共有して、ちょっと始めましょう。このプロジェクトを作成し、InstagramでID @officialmissioncriticalを使用してタグを付け、コミュニティに貢献し、この地球問題と戦うためのArduinoコミュニティの力を示しましょう!
>(私たちはお金を必要としません。私たちはあなたたちに、大義と戦うのに役立つあらゆる種類の革新的なプロジェクトを寄付する必要があります!)
コード
Github
https://github.com/arduino-libraries/Servohttps://github.com/arduino-libraries/Servo 回路図
connection_5YWkDyQBo4.fzz 製造プロセス
- Arduino Nano RP2040を使用したDIYPhotoshop編集コンソール
- Arduinoを使用したDIYの最もシンプルなIV9Numitron時計
- 862D +用のDIYはんだごて制御
- Arduinoとスマートフォンを使用したDIY電圧計
- Arduinoを使用したDIY赤外線ハートビートセンサー
- MotionSense
- arduinoを使用したソナーと処理IDEでの表示
- MobBob:Androidスマートフォンで制御されるDIY Arduino Robot
- ロータリーエンコーダー付きDIYシンプル測定ホイール
- BoltとArduinoを使用したLEDの明るさの制御
- Arduino、Yaler、IFTTTを使用したIoTゲージ