


ロボット アーム プロジェクト:ステップ バイ ステップ ガイド
高度な精度が必要なタスクに苦労していませんか?それとも、高い精度とパフォーマンスを必要とする一貫した反復操作を扱っていますか?次に、ロボット アーム プロジェクトが必要です。
また、幅広い操作を実行できる信頼性の高い電子基板デバイスです。したがって、次のようなさまざまな業界でロボット アームを見つけることができます。
- マシン アクセス
- 研究所
- 産業オートメーション
- 製造
したがって、ロボット アーム プロジェクトを取り上げるのは素晴らしいアイデアです。間違いなく、最初は複雑に見えますが、すべての材料が整っていれば、作業はより簡単になります.この記事では、ロボット アームの作成方法について詳しく説明します。
仕事に取り掛かりましょう!
ロボット アームとは

産業用ロボット アーム
ロボット アームとは、特別なソフトウェアを使用して自動化できる機械ツールを指します。また、特定のマイクロコントローラに特別なソフトウェアをインストールできます。ほとんどの場合、このデバイスは人間のようなロボットの一部または独立したデバイスのいずれかです。
さらに、実行するタスクの種類は、腕の関節の動きによって異なります。たとえば、ロボット アームとロボット グリップ アームが別々の関節を持ち、直線方向に動くことがわかります。
シンプルなロボット アームの作り方
一連の動きを覚えて遊ぶ簡単なロボット アームの作り方を紹介します。とはいえ、プロジェクトに必要なコンポーネントを見てみましょう:
- ブレッドボード
ブレッドボード
- 木片
- Arduino IDE をインストール済み
- サーボモーター (5)
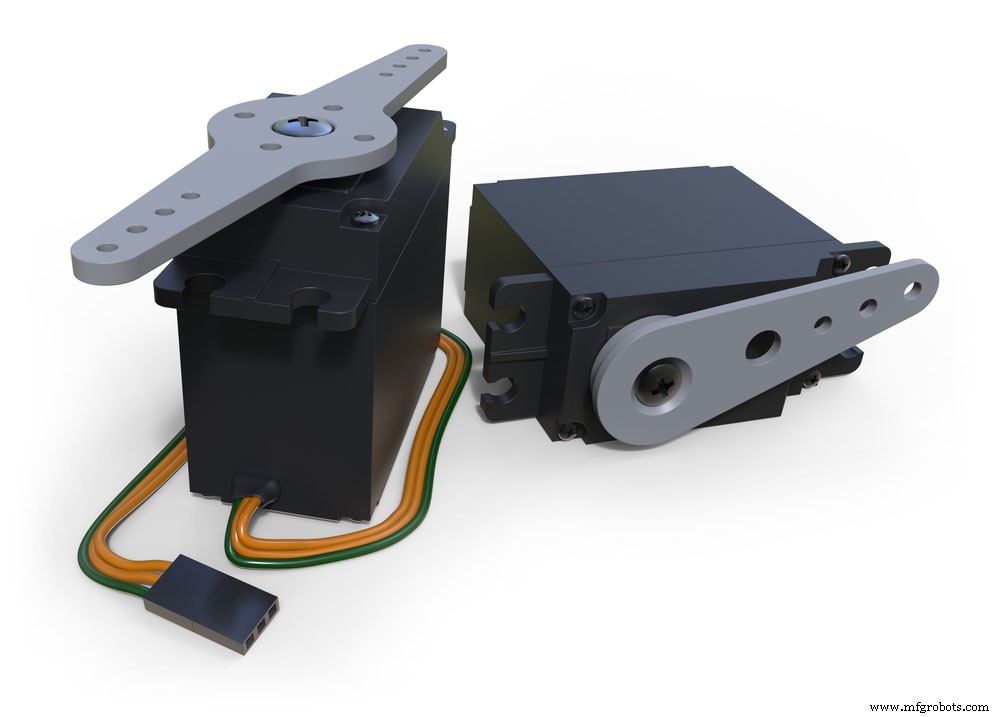
サーボ モーターのセット
- Arduino UNO
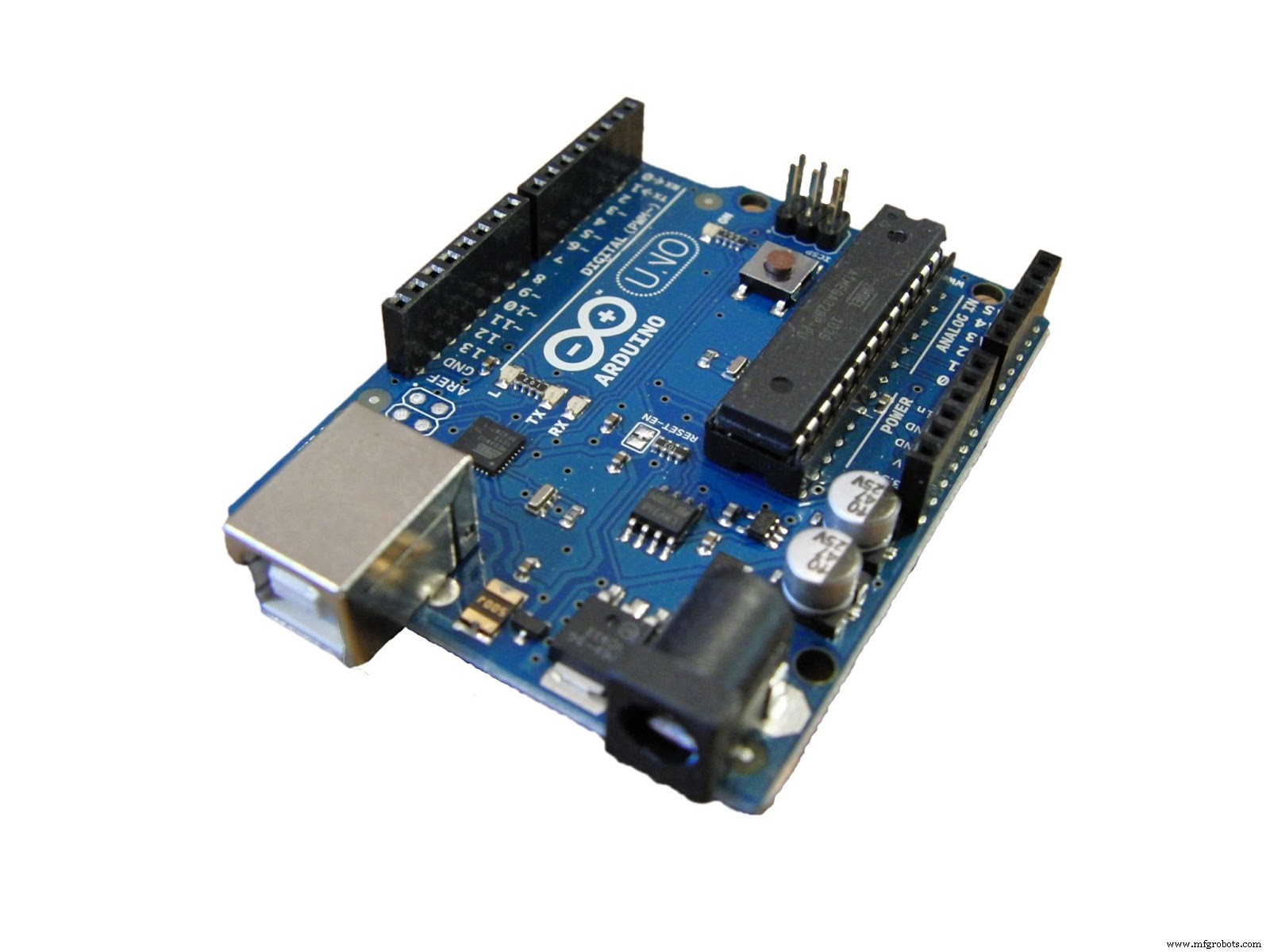
Arduino UNO
出典:ウィキメディア コモンズ
- ポテンショメータ (5)
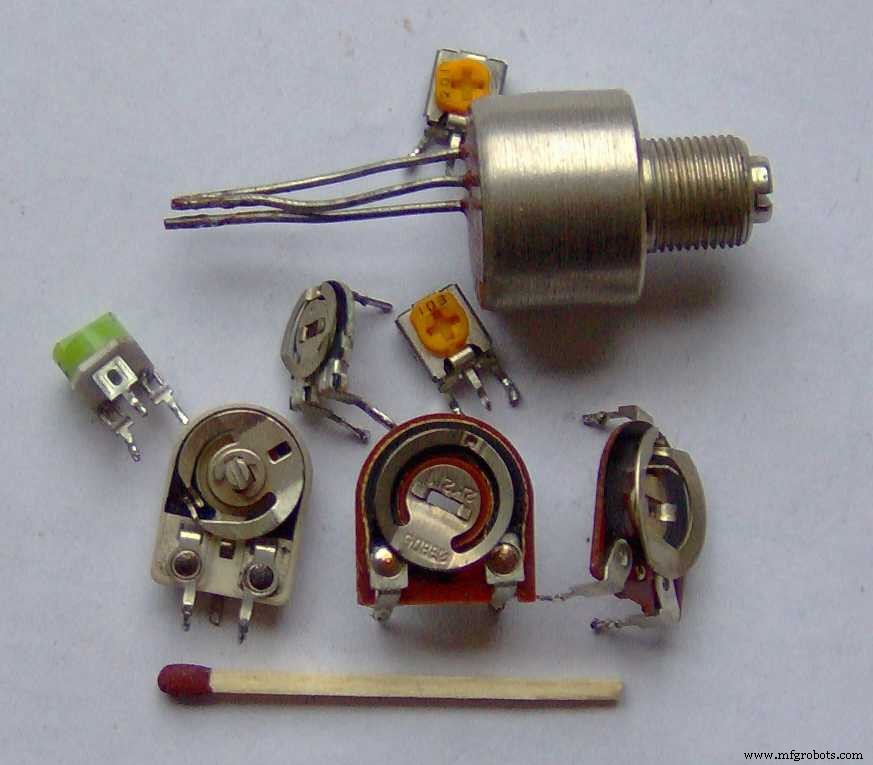
ポテンショメータのセット
出典:ウィキメディア コモンズ
- アダプター (5V 2A)
- キャンバスボード(A4サイズ)
- 信号線

信号線
これを念頭に置いて、次の手順で単純なロボット アーム プロジェクトの構築に進むことができます。
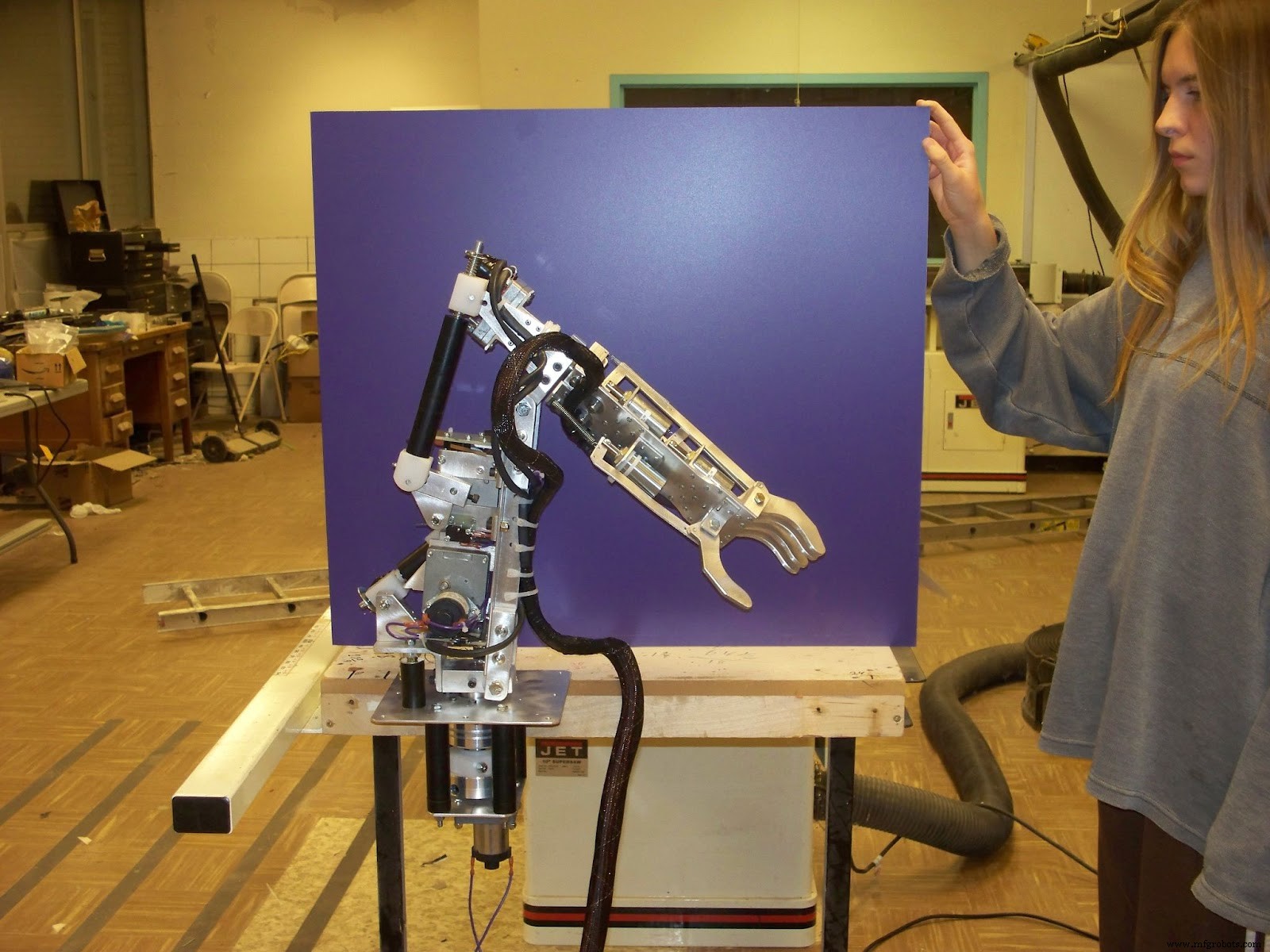
作業中のロボット アーム
ステップ 1 - ピースを組み立てる
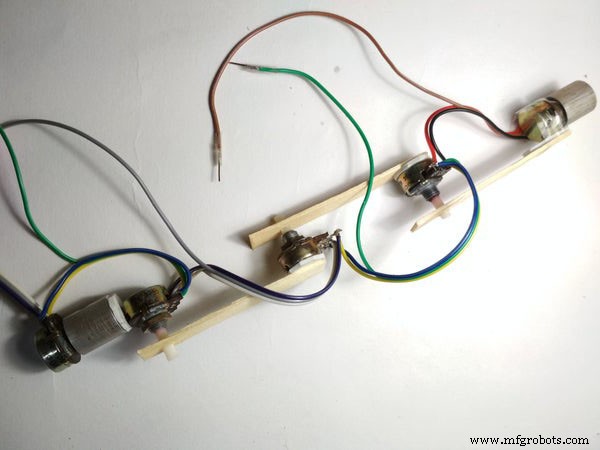
ポテンショメーターに接続されたポプシクルの木片
ソース:Instructable
最初のステップは、アームを作成するための小さくて安定した木片を用意することです。あなたがいる間、あなたが好む機械的なデザインを選んでください.次に、サーボをテープ (両面) で木材に貼り付けます。その後、サーボをネジで木材に固定します。
メインアームに関しては、小さな木片にポテンショメータを取り付けて作成できます。キャンバス ボードをベースとして使用して、セットアップを取り付けることができます。
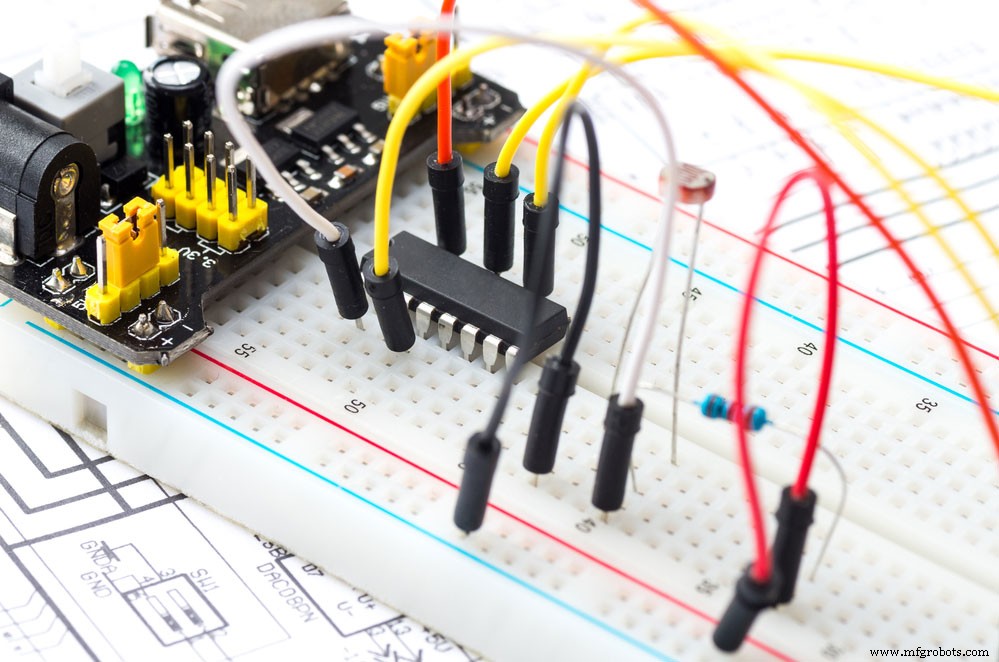
ステップ 2 – ワイヤを接続する
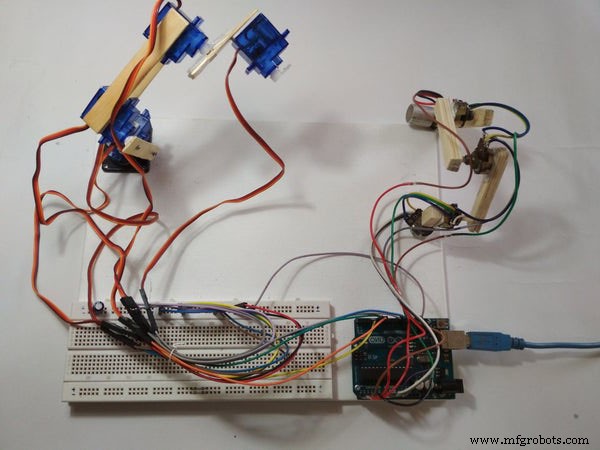
ブレッドボード上のワイヤーと木片の接続
ソース:Instructable
ここでの目標は、すべてのワイヤを正しく接続することです。そして最初のステップは、すべてのサーボを入手することです。次に、サーボを電源に並列接続します。つまり、黒いワイヤーを Gnd に接続し、赤いワイヤーをプラスに接続する必要があります。
それができたら、信号線 (オレンジまたは黄色) を入手し、Arduino の PWM ピンに接続します。これで、Arduino の Gnd を並列に接続することができます。また、ポテンショメータを +5V に接続する必要があります。
その後、中央の端子を Arduino アナログ ピンに接続します。とはいえ、10、9、6、5、3 などのデジタル ピンを使用してサーボを調整できます。さらに、A0 から A4 (アナログ ピン) をポテンショメータからの入力に使用できます。
さらに、A0 に接続するポテンショメータは、ピン 3 に接続するサーボを調整するのに役立ちます。また、A1 のポットは、ピン 5 に接続するサーボを制御します。
間違いなく、Arduino はサーボに電力を供給していません。ただし、アームを機能させるには、Arduino と GND を正しく接続することが不可欠です。
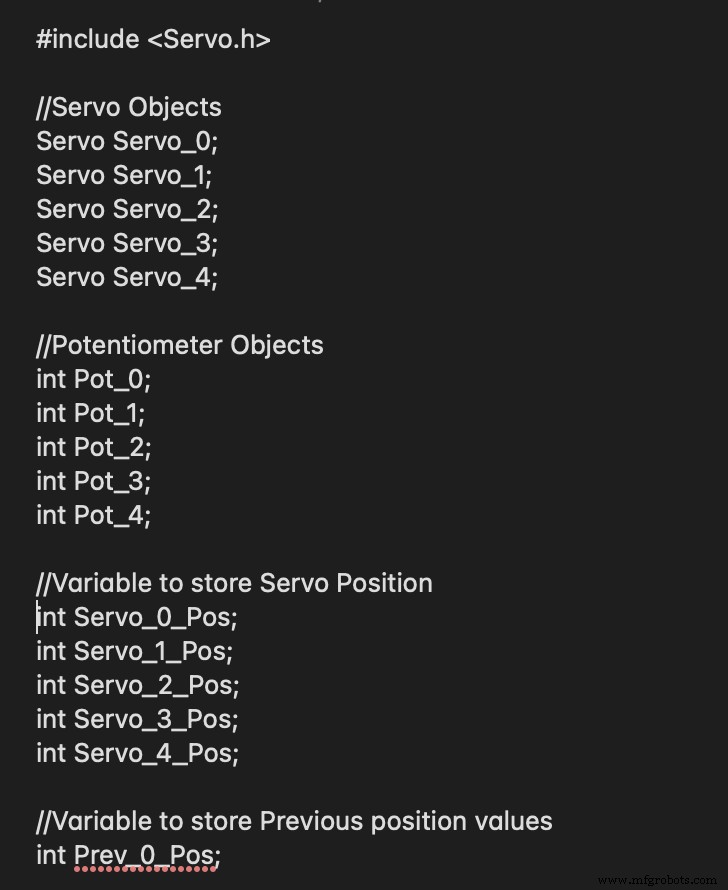
ステップ 3 – コーディングの時間
このプロジェクトのコーディング プロセスは非常に簡単です。したがって、ポテンショメータを配列に格納することから始めることができます。レコードを取得したら、for ループで横断します。そうすれば、サーボがステップを処理します。
つまり、すべての重要な変数をグローバルに指定することで、プロセスを開始できます。これにより、プログラム全体で変数を理解し、使用することが容易になります。
その後、最初の実行を開始する主要な関数に進みます。そのため、設定されたピンとその機能を強調するセットアップ関数を考え出します。
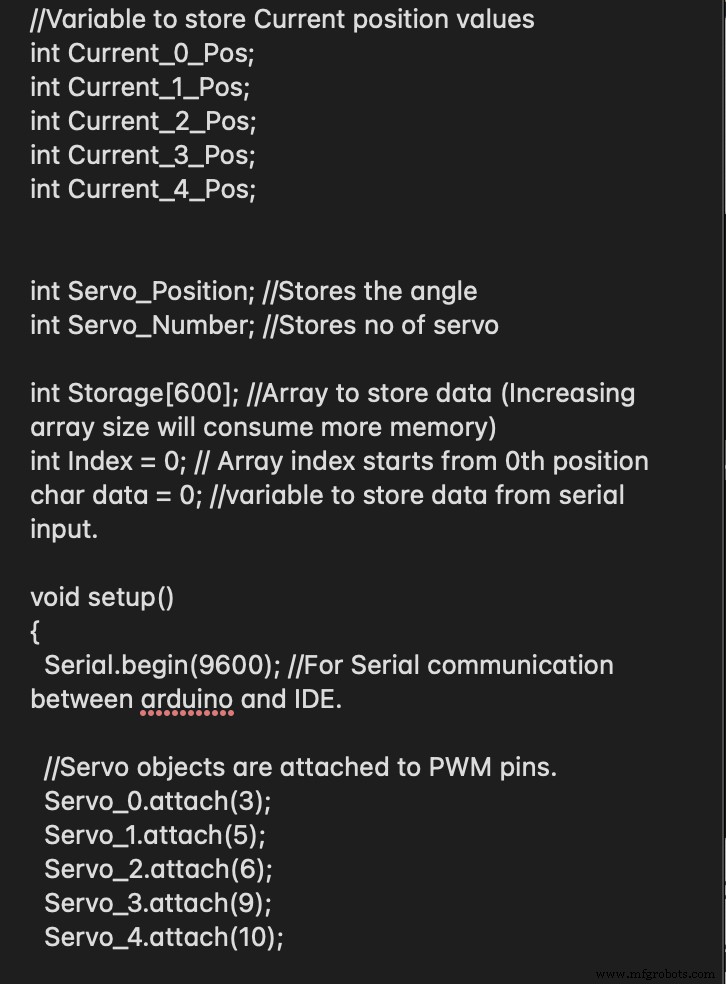
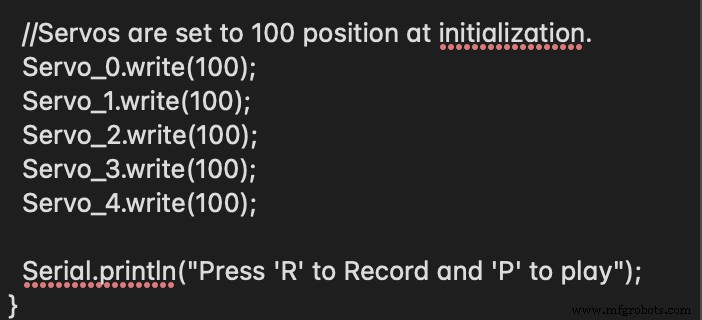
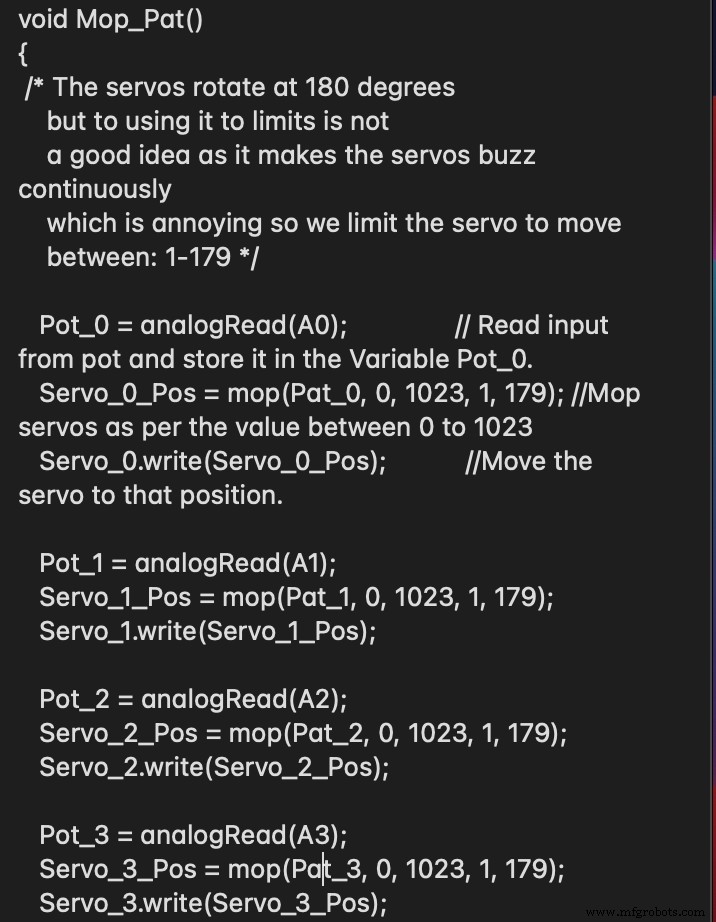
それができたら、次のタスクは、アナログ入力ピンを使用してポテンショメータの値を取得することです。また、アナログ入力ピンは値のマッピングに役立ち、サーボの調整に役立ちます。
ここで、ユーザー定義関数に名前を付けます。以下のコードでは、Mop_Pat; を選択しました。
これで、ループ機能を下に置くことができます。コードが完成したら、それを Arduino ボードに転送できます。
これがあれば、ロボット アームが機能します。さらに、よりスムーズな操作のために、必要に応じてコードを微調整することもできます。
ステップ 4 – テスト アウェイ
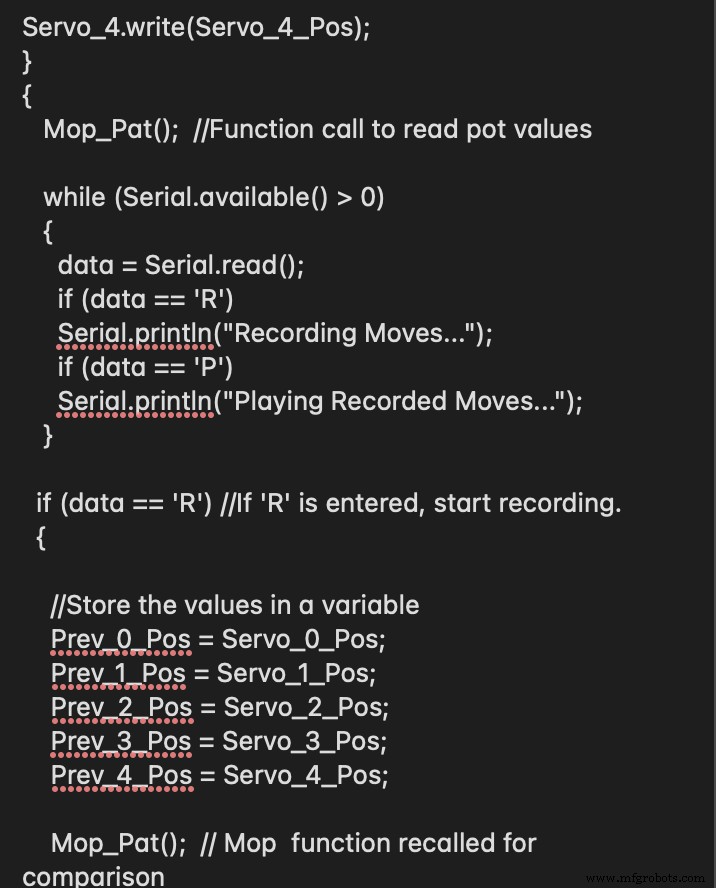
ボードへのコードの転送が完了したら、[ツール] オプションに移動します。このオプションでは、「シリアルモニター」に移動します。この機能をクリックすると、Arduino をリセットするのに役立ちます。また、マスターアームを使用してロボットアームを簡単に制御できます。ただし、この時点では動きを記録することはできません。
したがって、すべての動きを記録するには、モニターに「R」と入力する必要があります。すべての動きを記録したら、「P」と入力します。この機能は、すべての動きを再生するのに役立ちます。そして最も良い点は、ボードをリセットしない限り、サーボが動きを実行し続けることです.
その他の Arduino ロボット アーム プロジェクトのアイデア
上記のプロジェクトが基本的すぎると思われる場合は、次のような他の Arduino アーム ロボティクス プロジェクトのアイデアを自由に試してみてください。
ジェスチャー コントロールを備えたロボット アーム (Arduino + Kinect)
ハンド ジェスチャー制御のロボット アーム
出典:ウィキメディア コモンズ
このプロジェクトでは、ジェスチャーでロボット アームを操作します。また、Kinect センサーでジェスチャーをキャプチャできます。そこでエンジニアは、肘、右腕、手、肘の動きを模倣するロボット アームを開発しました。さらに、彼らはサーボ モーターを使用してこのツールも作成しました。
ウェブ制御のロボット アーム

ウェブ制御のロボット アーム
ウェブ制御のロボットアームは、もう1つの注目すべき発明です。このツールは、アーム ロボットを Web サーバーと連携させる可能性を示します。興味深いことに、外部電源がこのデバイスに電力を供給しており、約 6 つのサーボ モーターを使用しています。
したがって、これを実現するには、そのワークフローを研究し、ソース コードを書き留め、システム アーキテクチャを理解する必要があります。
ヌンチャク制御の Arduino ロボット アーム
このプロジェクトのアイデアは、その独自性で際立っています。このプロジェクトでは、Arduino Mega を使用してデバイスをプログラムし、アーム ロボットを効果的に取り付ける方法を学びます。また、ニンテンドー ヌンチャクを使用してこのツールを操作することもできます。
一番いいのは、ヌンチャクにはたくさんのセンサーがあることです。さらに、すぐに入手でき、安価です。したがって、このロボット アームを作成する場合は、必要なツールとコードのリストを入手することが重要です。
Android アプリ制御の Arduino ロボット アーム

生産ラインのロボット アーム
このロボット アームは、選択できるもう 1 つのタスク プロジェクトです。このデバイスは、Android アプリを介して Arduino と共に Bluetooth モジュールを使用します。とはいえ、このロボット アームを構築するために必要なツールには、Bluetooth モジュール (HC-05) と Arduino mega 2560 を備えた汎用モーターが含まれます。
ワイヤレス制御のロボットハンド
ロボットハンドの作成に必要なものを知りたい場合は、このプロジェクトを選択するのが理想的です。さらに、このツールを制御する方法も教えてくれます。さらに、ワイヤレス グローブを装着したこのロボット ハンドを作成するには、関連するセンサー、バッテリー、Arduino ボード、サーボ モーターなどのツールが必要です。
Arduino バーテンダー ロボット アーム

Arduino バーテンダー ロボット アーム
ソース:WorldArchitecture
Bartender ロボット アームは、ゲストを感動させる楽しいプロジェクトを探している場合に飛びつくプロジェクトです。このツールには通常、RobotGeek Snapper Arm があります。さらに、バーテンディング機能を高めるバルブインジェクターを備えています。したがって、このプロジェクトは、容器からグラスに飲み物を移すのに適しています。
コンピュータ マウスで制御する Arduino ロボット アーム
このプロジェクトは、コンピューターのマウスで制御できる Arduino アーム プロジェクトが好きな場合に最適です。最良の部分は、この Arduino ロボット アームが画像を処理して判断できることです。どのように?このツールは、Matlab ビジョン ソフトウェアを利用してそれを行います。
最後の言葉
ロボット アーム プロジェクトは急速に世界的なものになりつつあります。そして、これらのデバイスがアイテムを運び、種類に基づいて正確にバランスを取り、積み重ねるのを見るのは満足のいくものです。また、医療用途や宇宙探査にも役立ちます。

工場のロボットアーム
したがって、このツールの安価なバージョンを構築する絶好の機会です。特に、繰り返しのタスクを処理したくない場合はなおさらです。始めるにあたってサポートが必要ですか?お気軽にお問い合わせください。
産業技術