


Speed Line Follower Robot V4
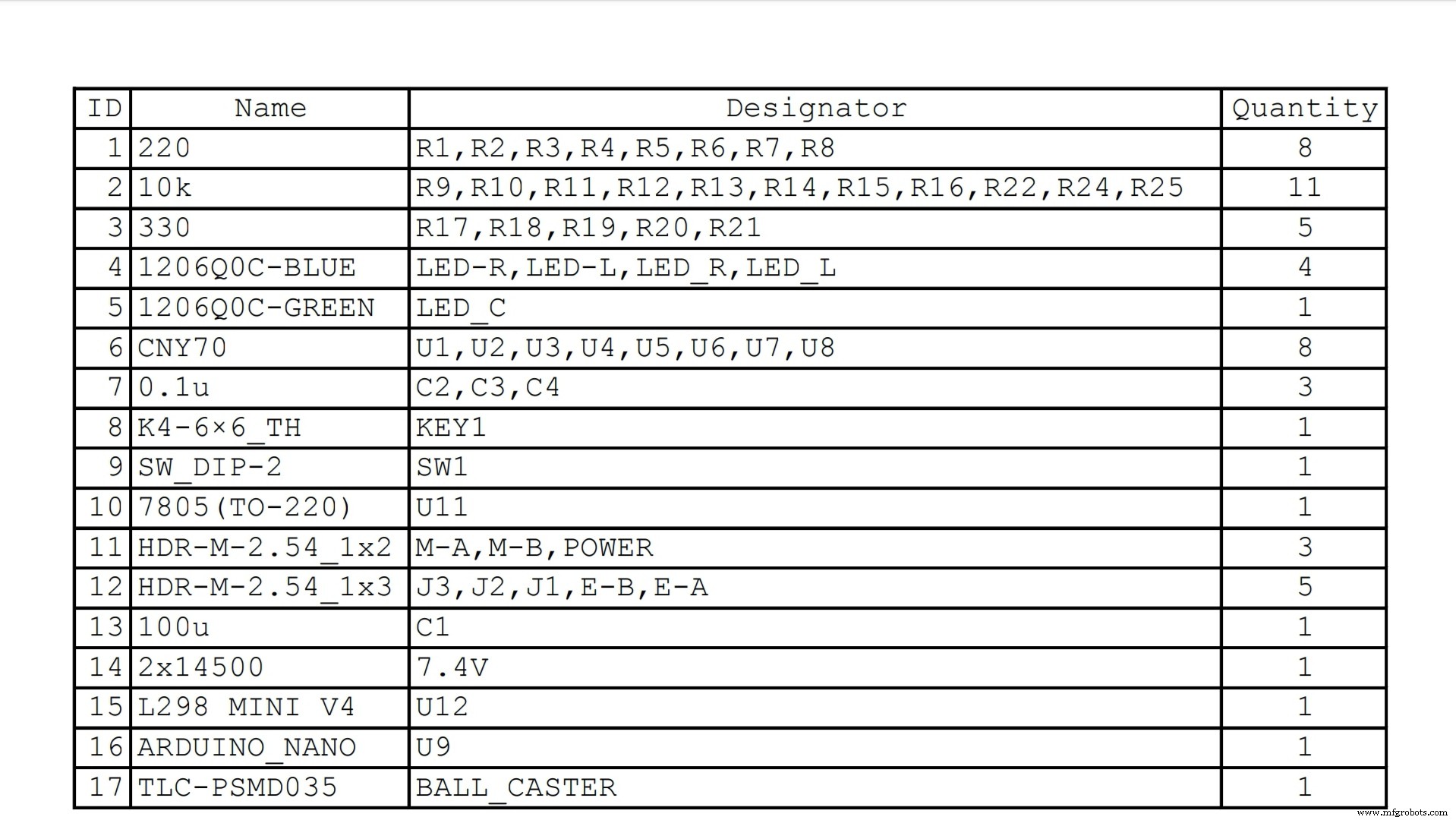
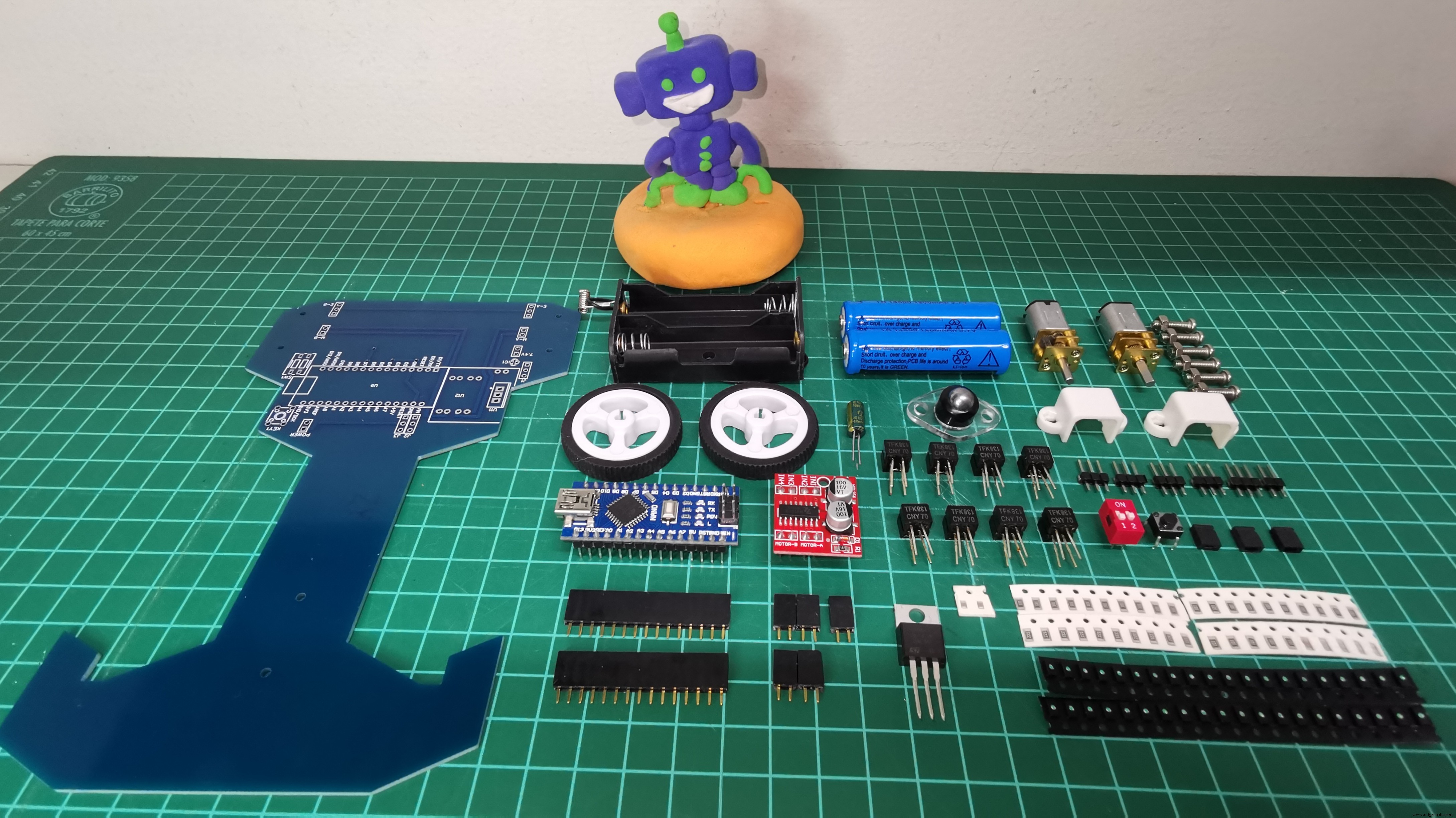
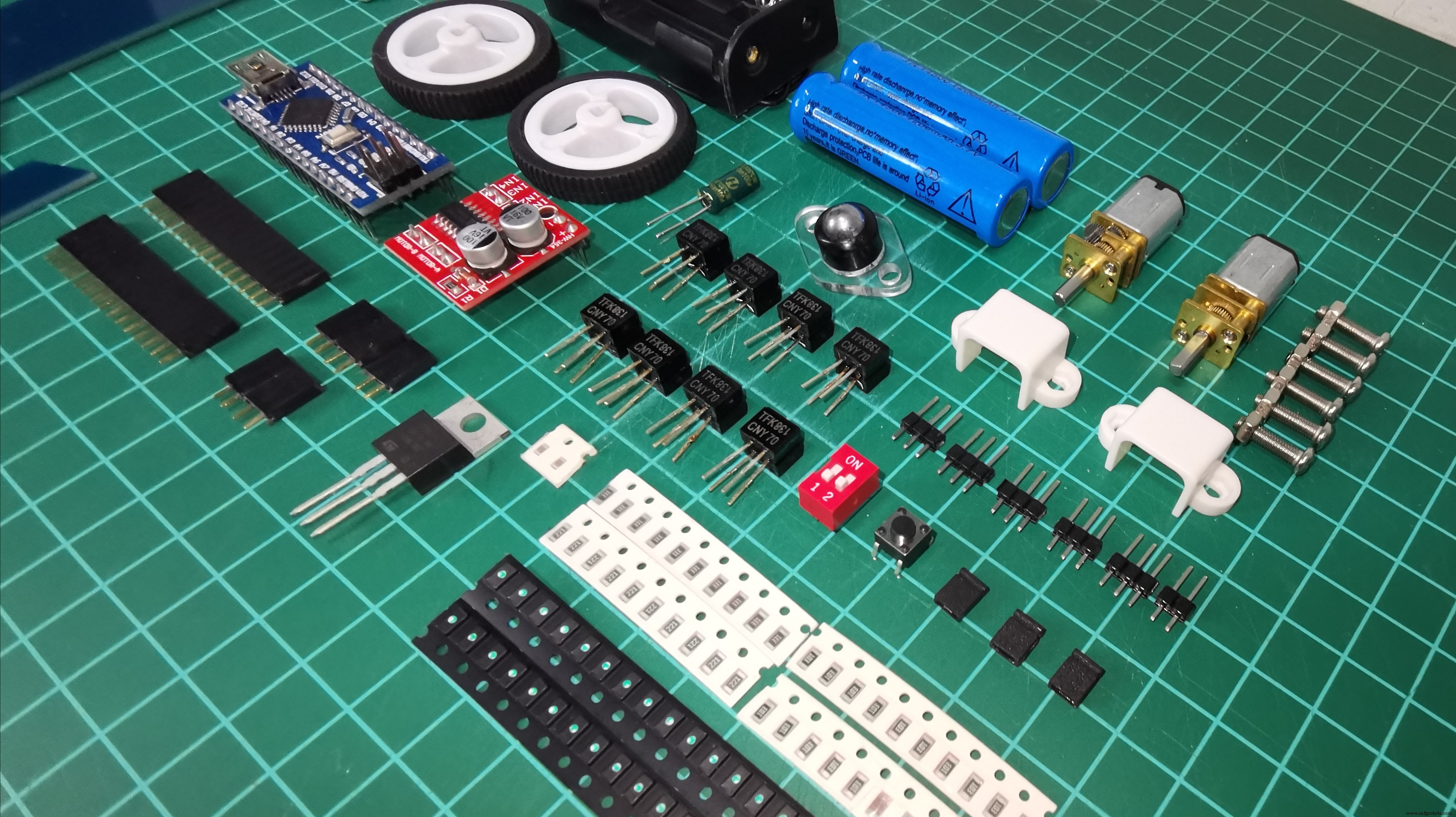
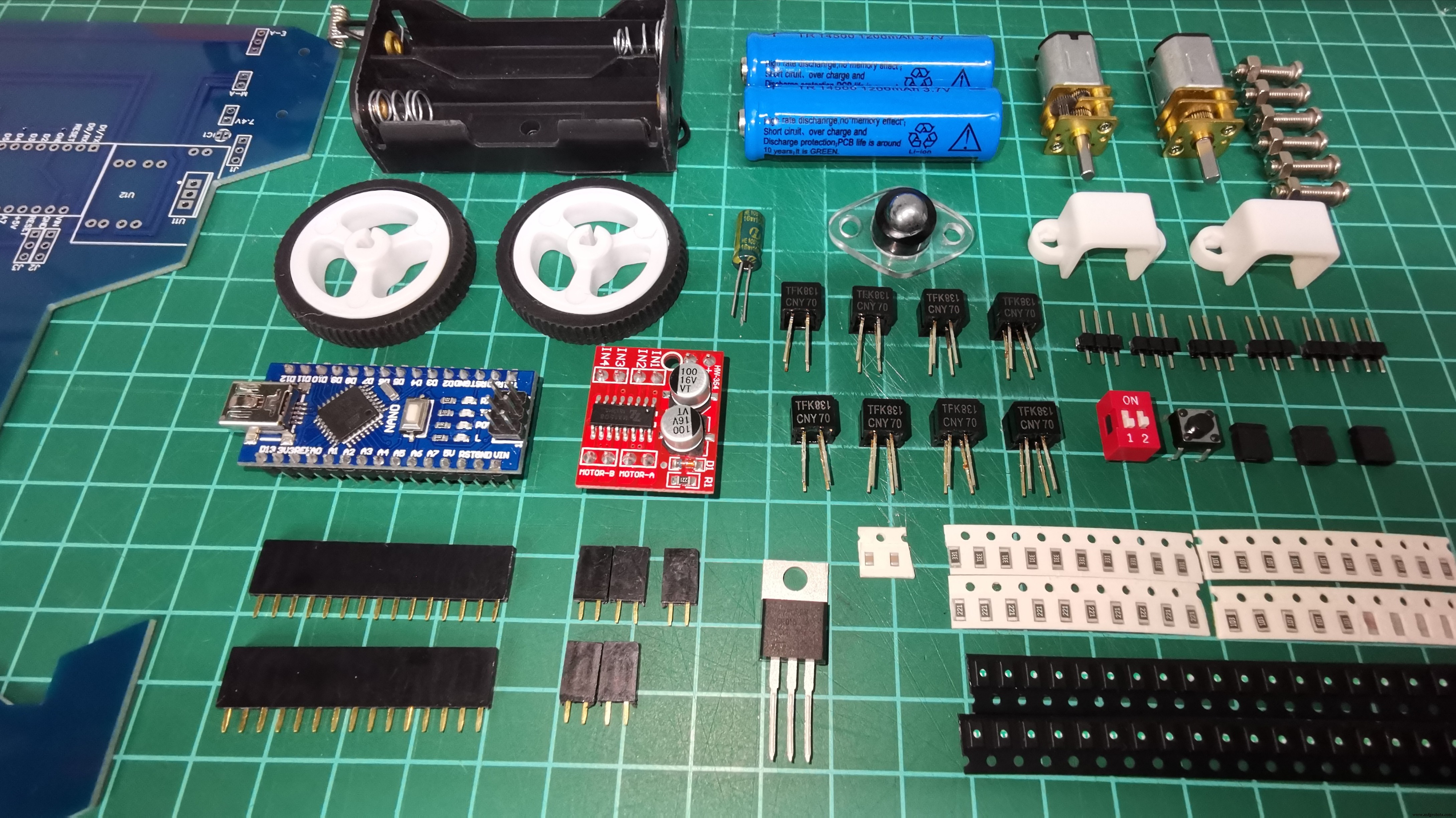
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 8 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 8 | ||||
| × | 11 | ||||
| × | 5 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 |
必要なツールとマシン
>  |
| |||
 |
| |||
 |
| |||
 |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
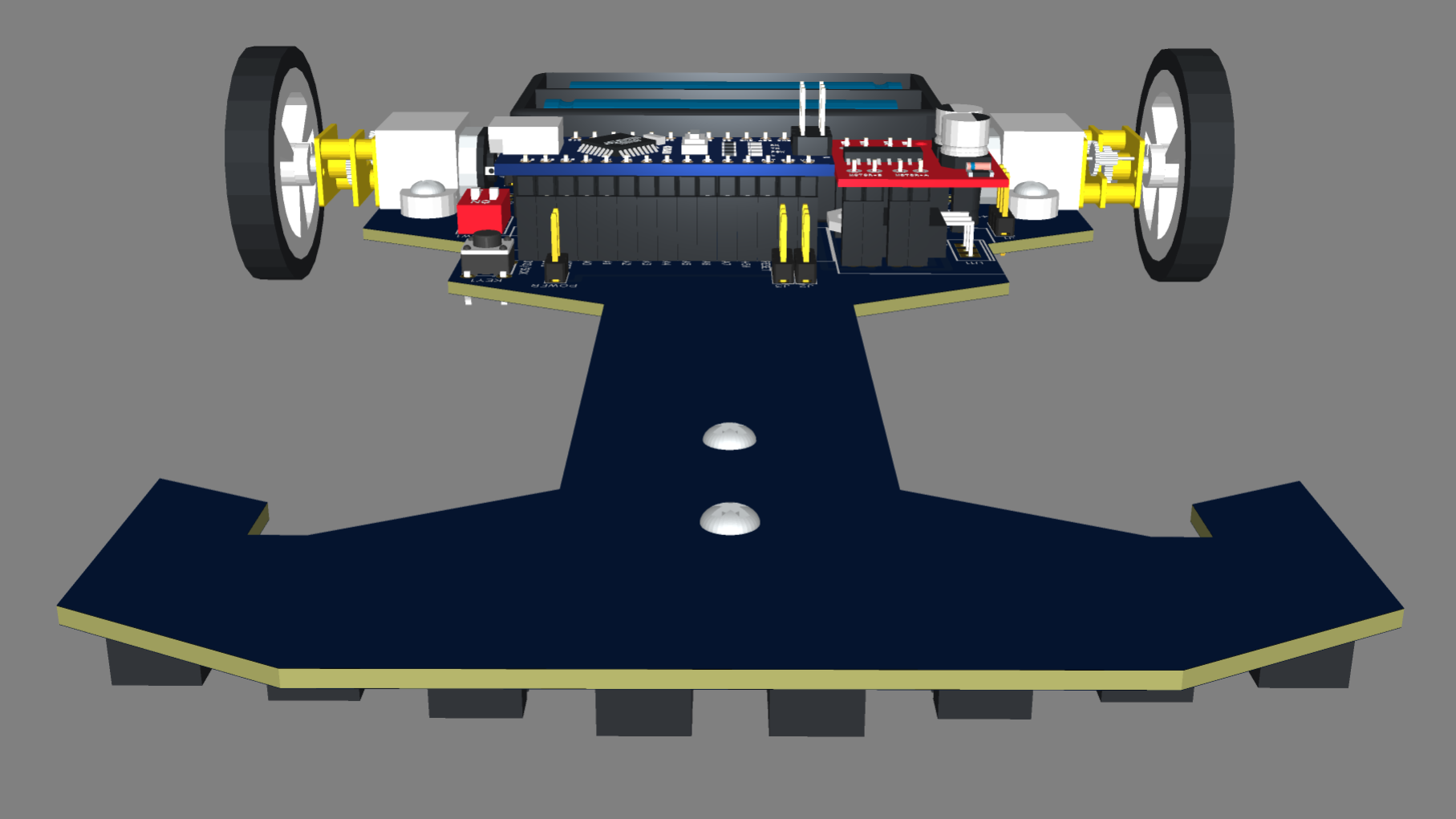
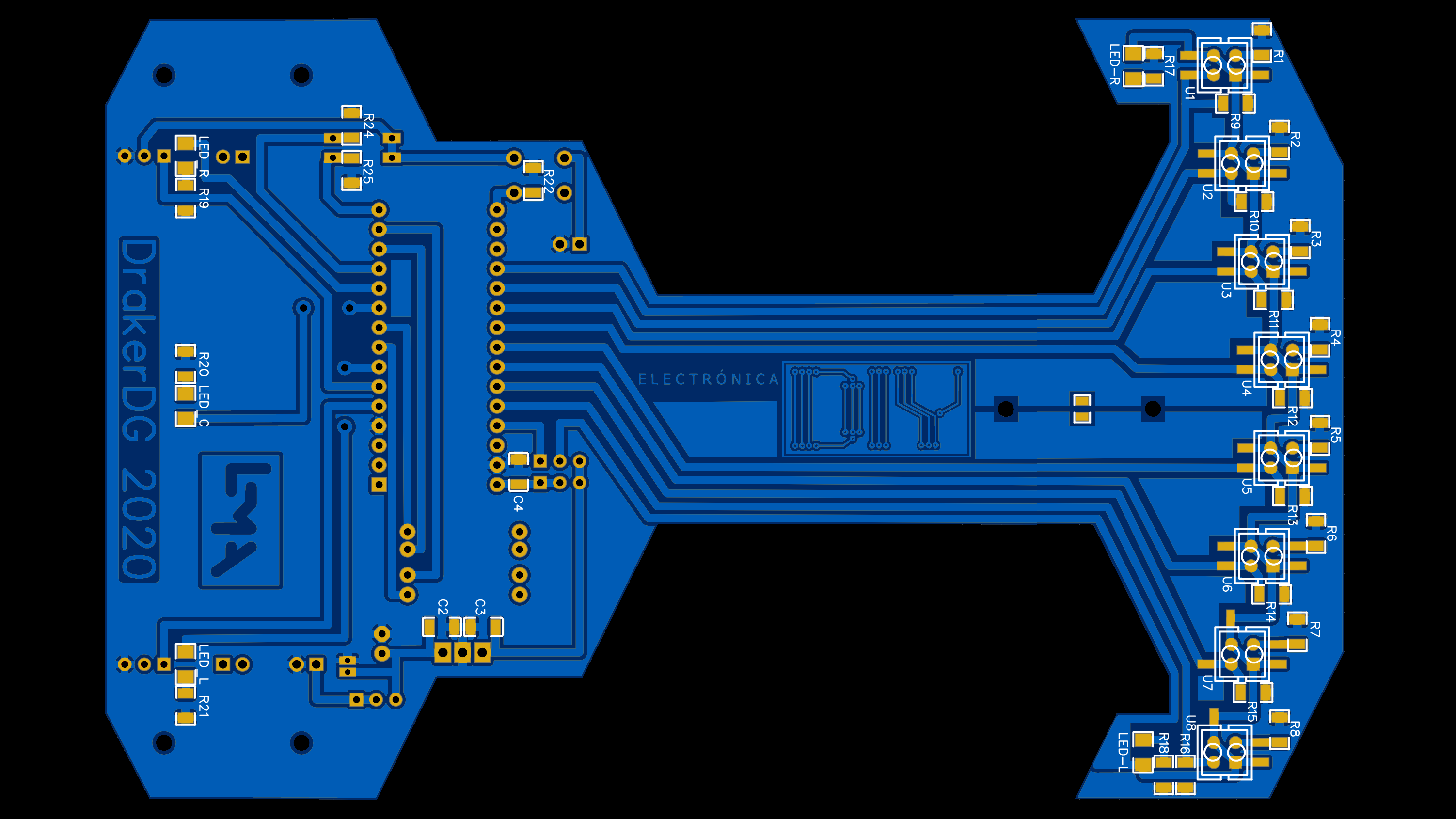
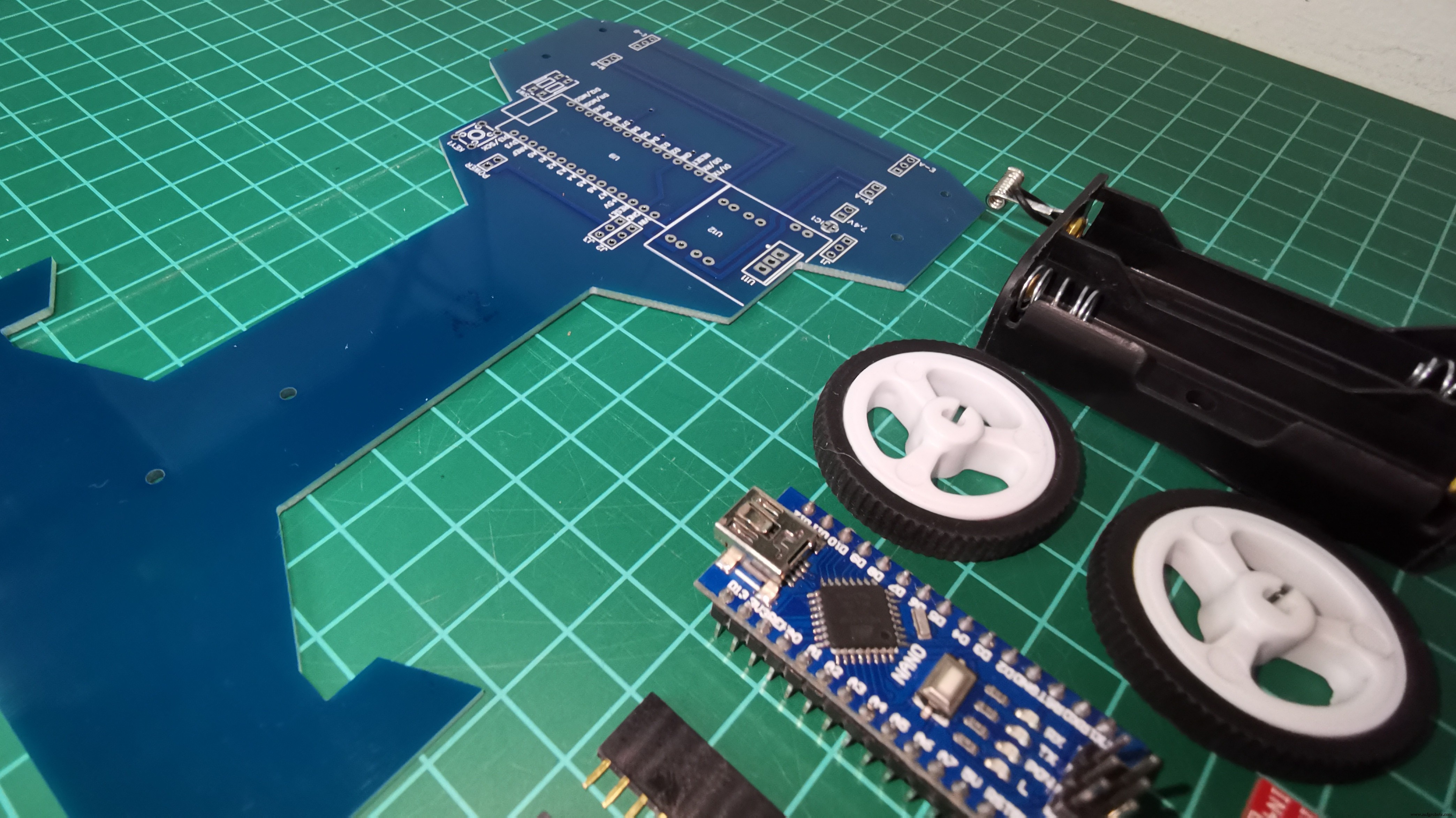
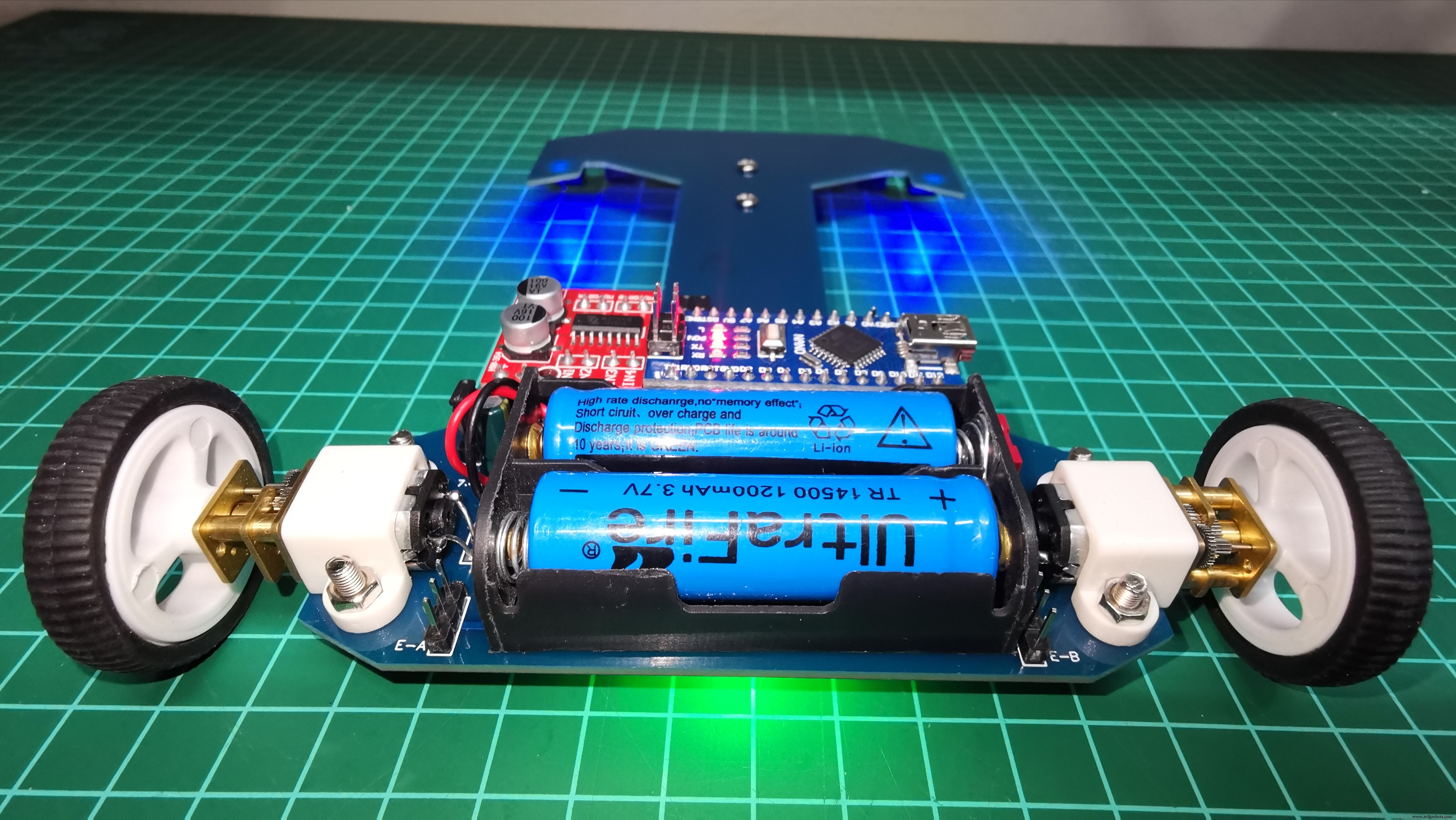
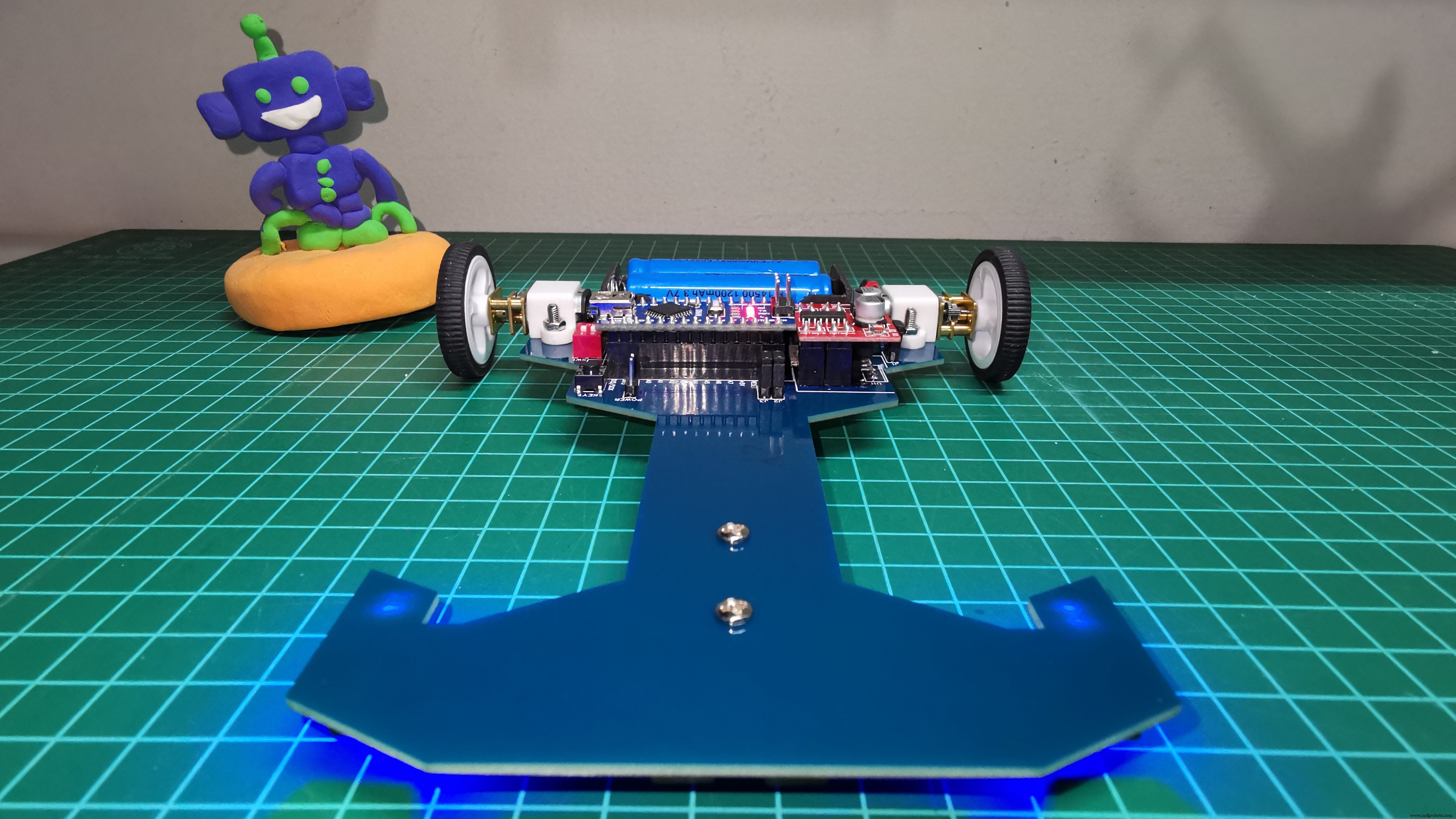
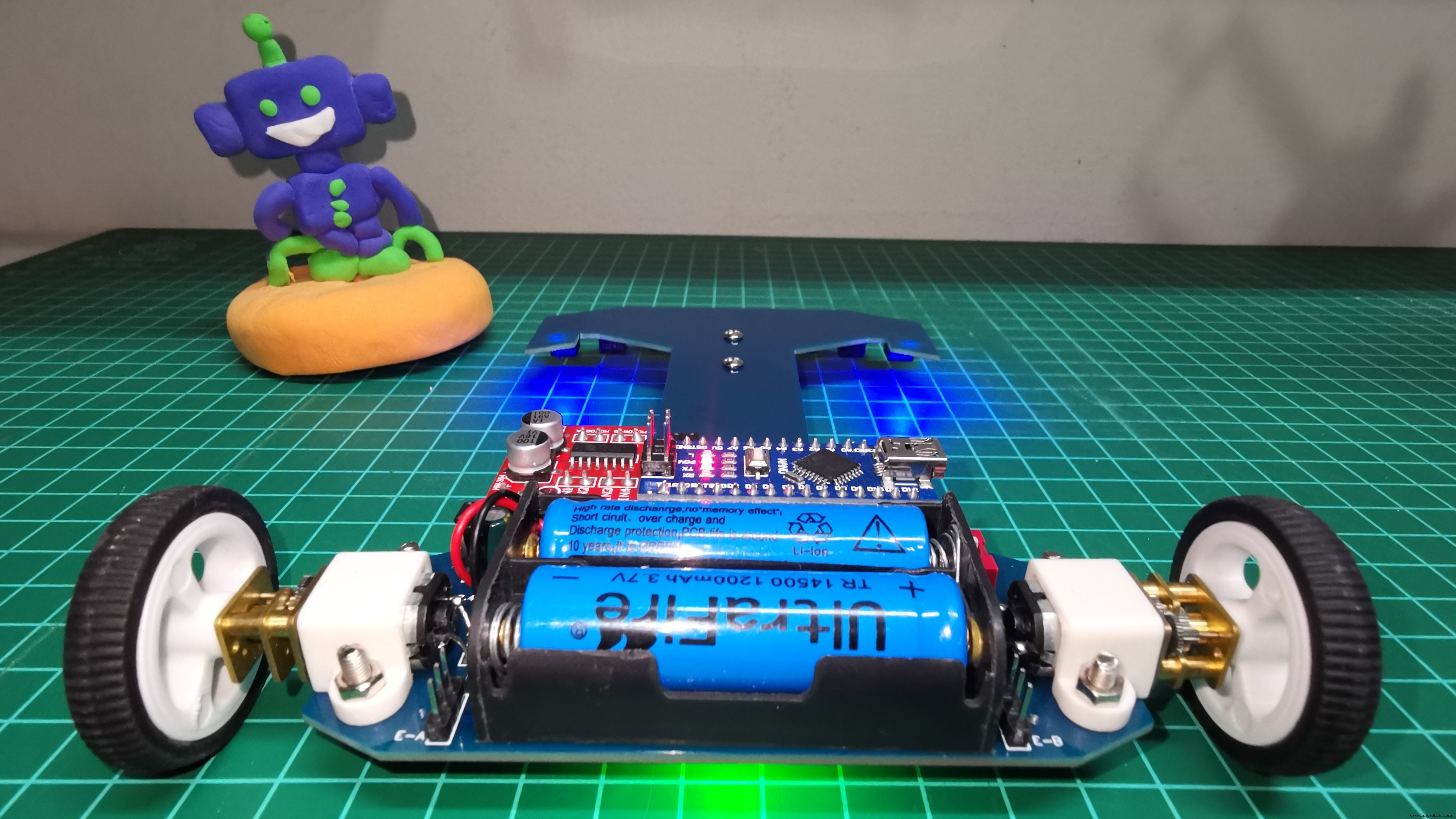
これは私の2番目のラインフォロワーロボット(バージョン4)です。前とは異なり、EasyEDAを使用してプリント回路の設計を行いました。このプリント回路は、ロボットのシャーシとして機能します。 PCBの製造はJLCPCBによって行われており、驚異的な品質と記録的な速さで出荷され、私の期待を上回っていたと言わざるを得ません。
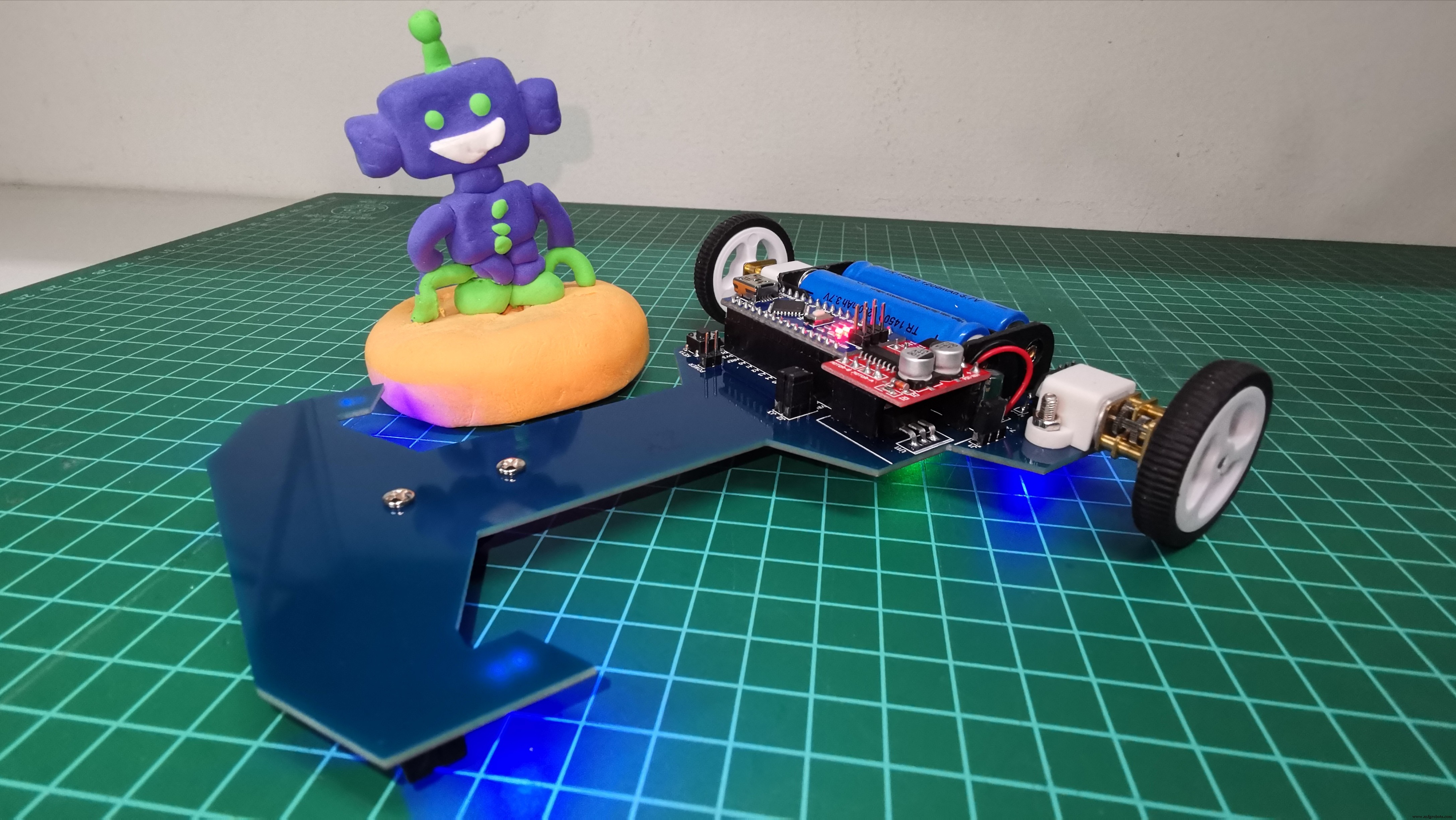
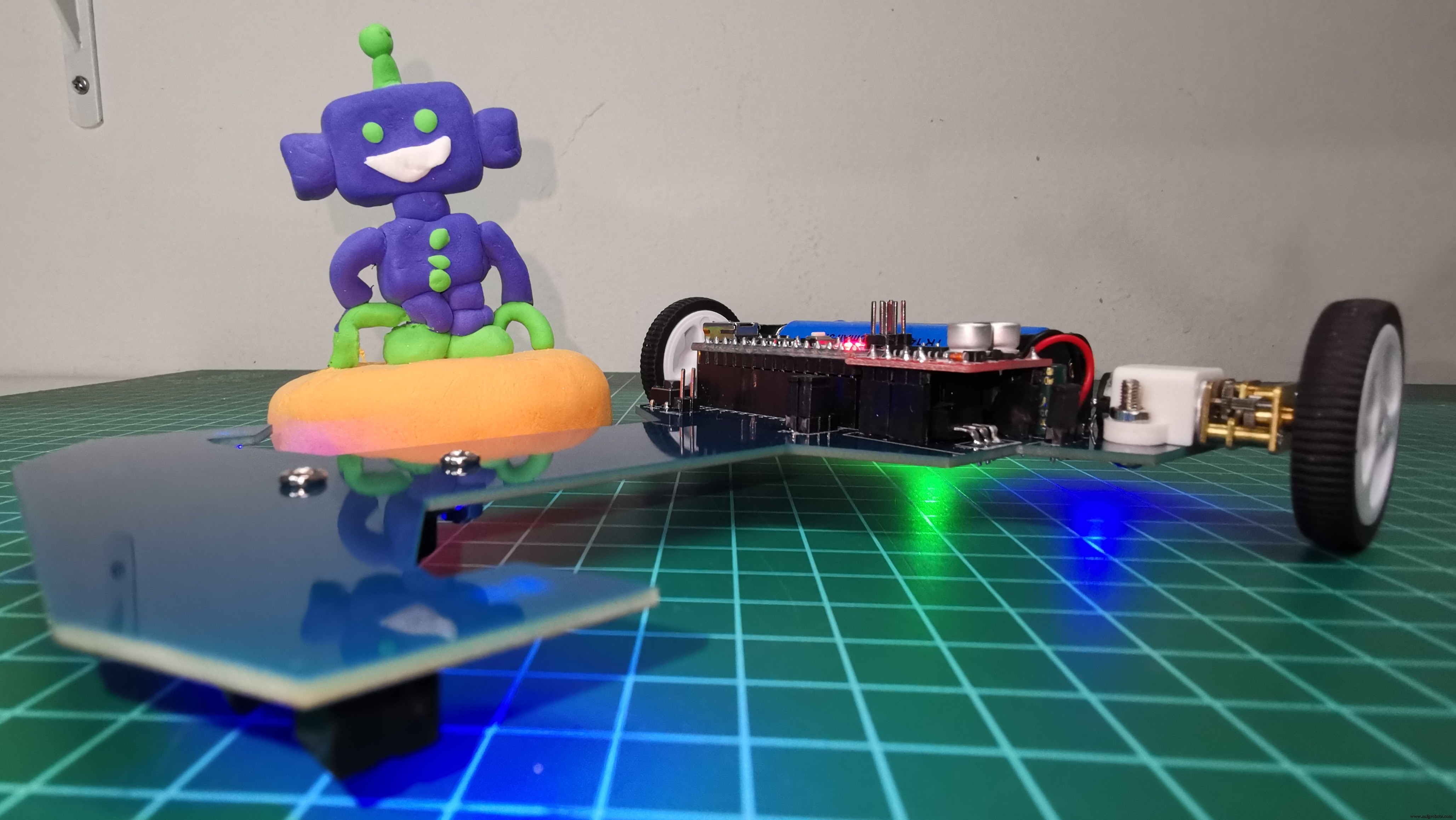
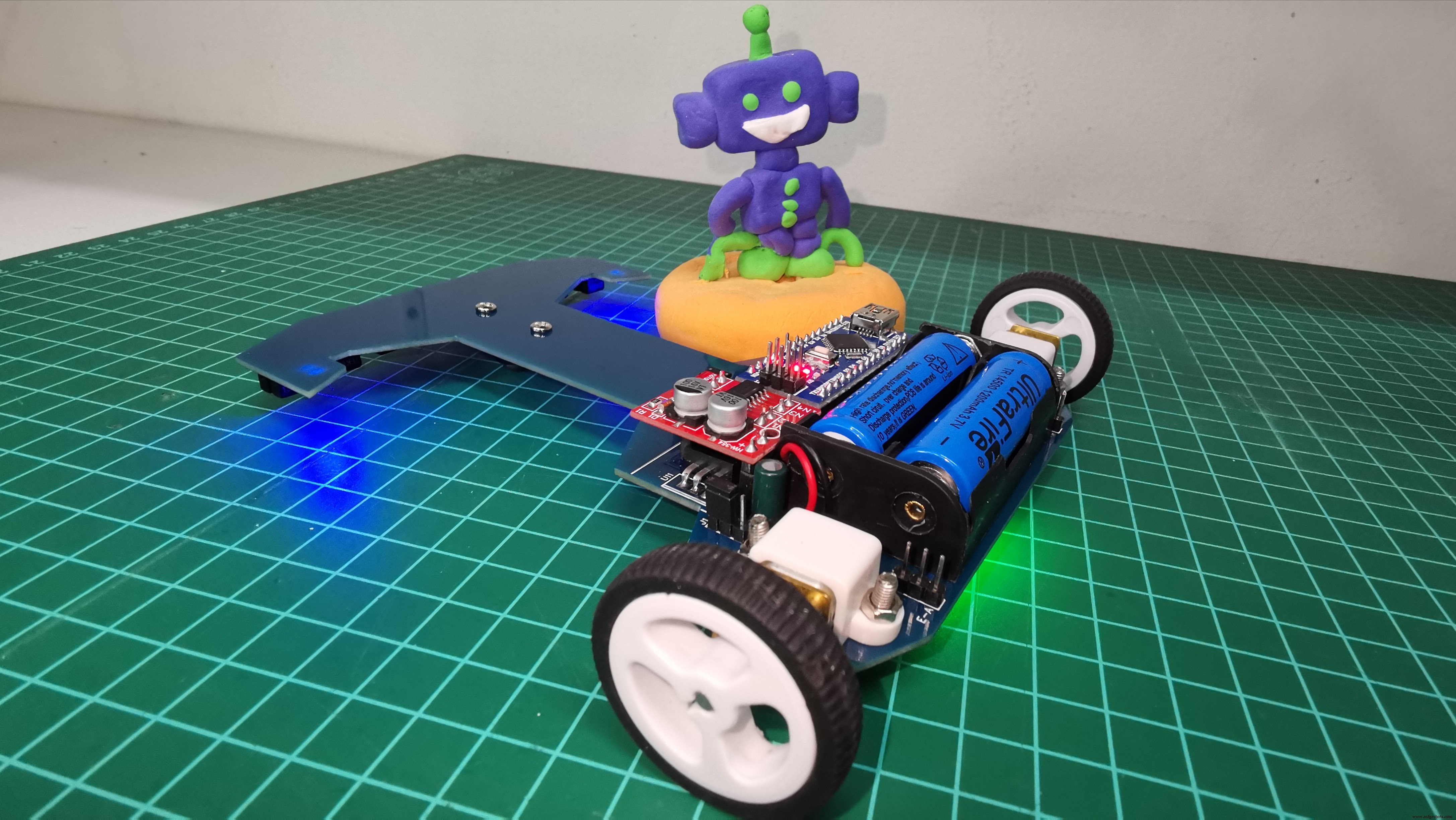
次のビデオは、TinkerCADで設計された3Dモデルを含めたプロトタイプの最終結果を示しています。
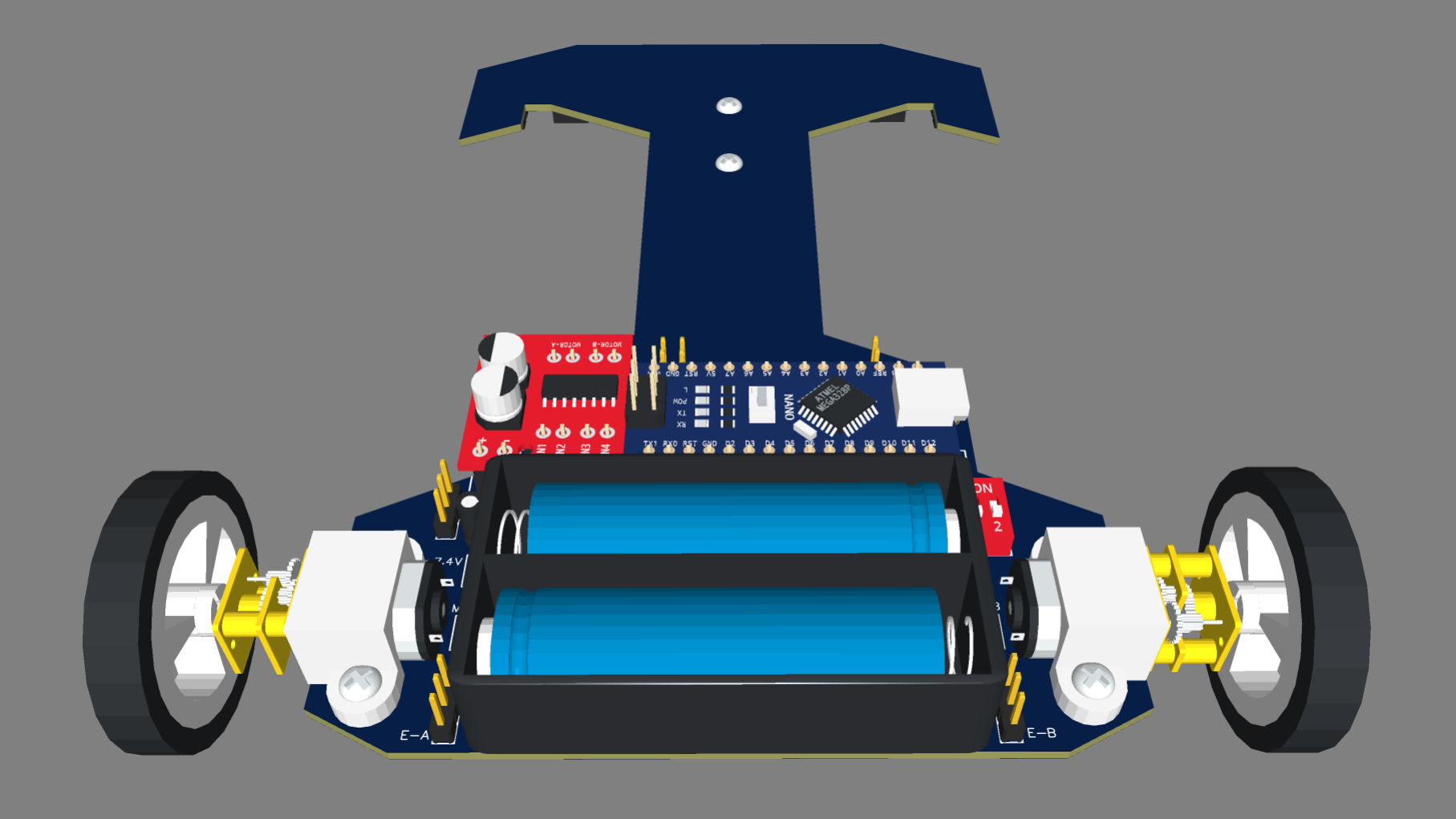
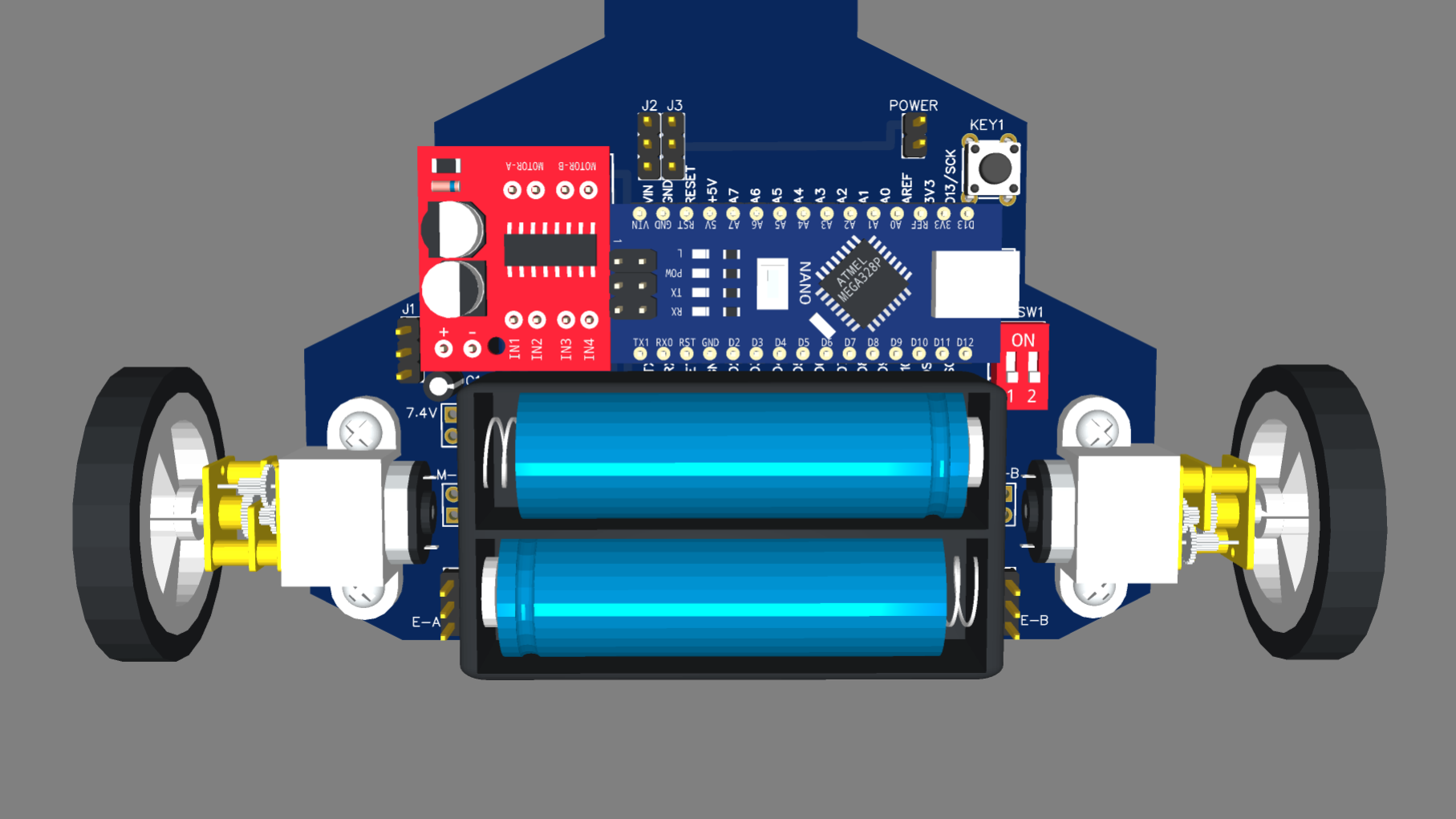
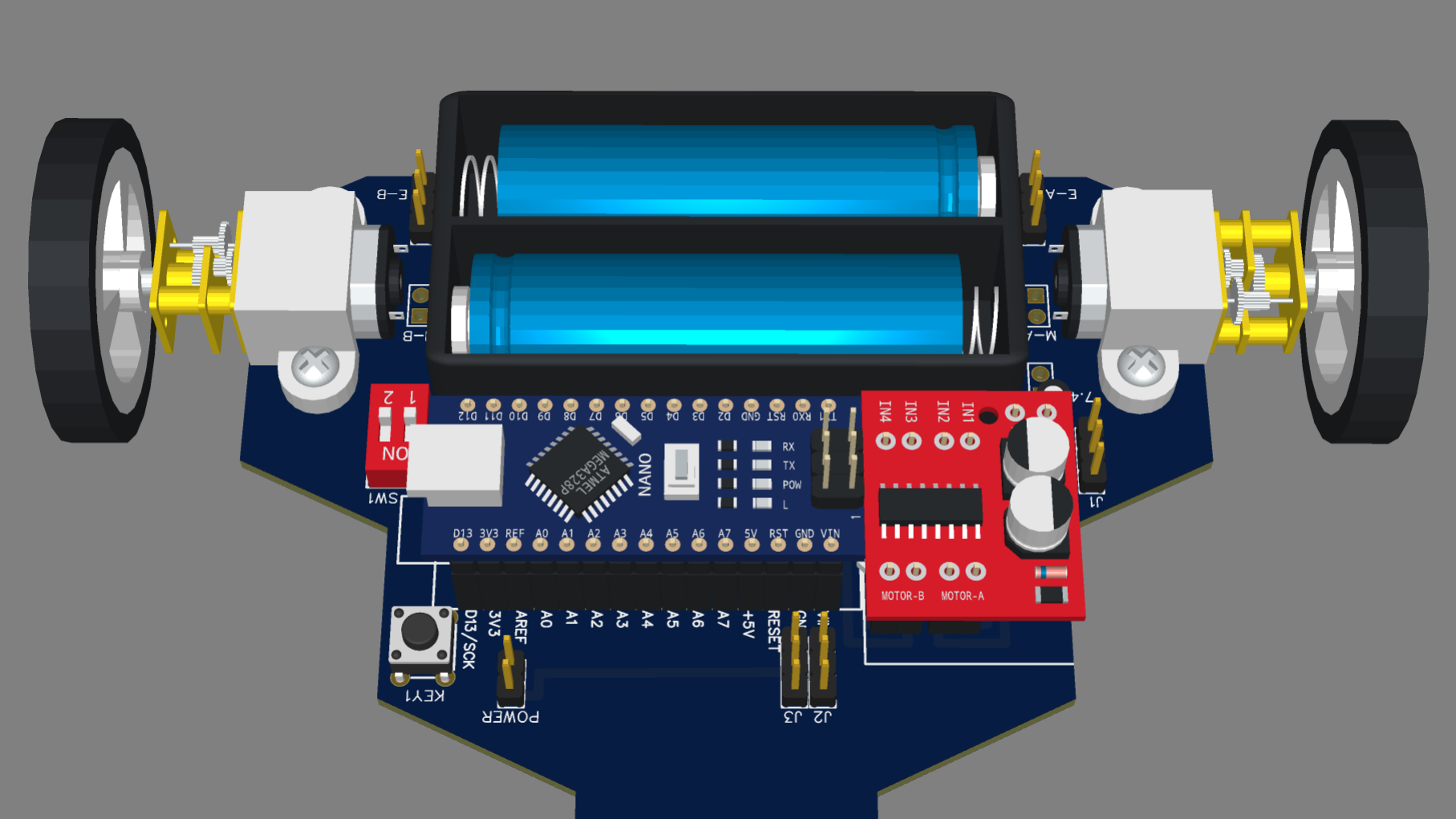
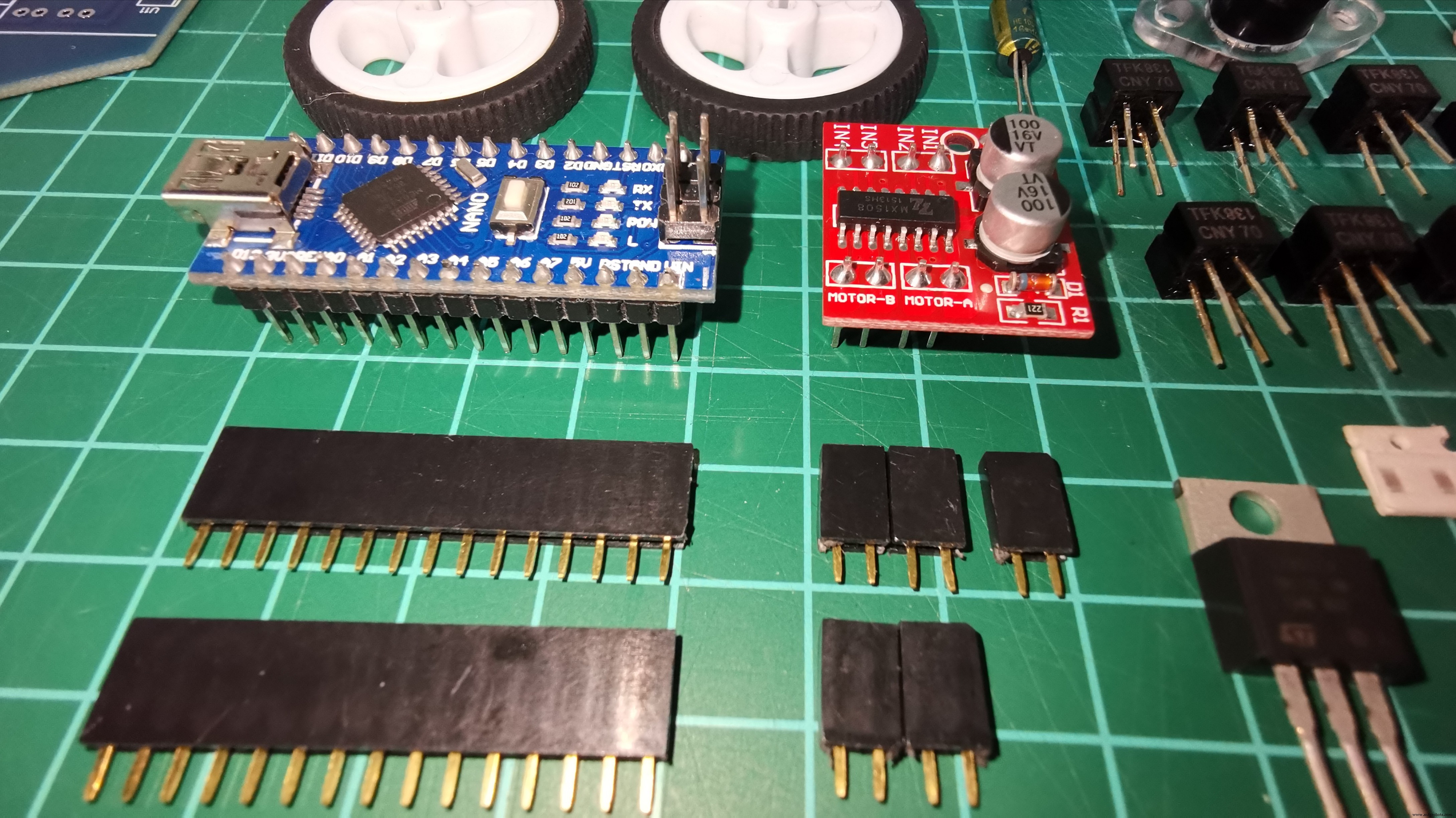
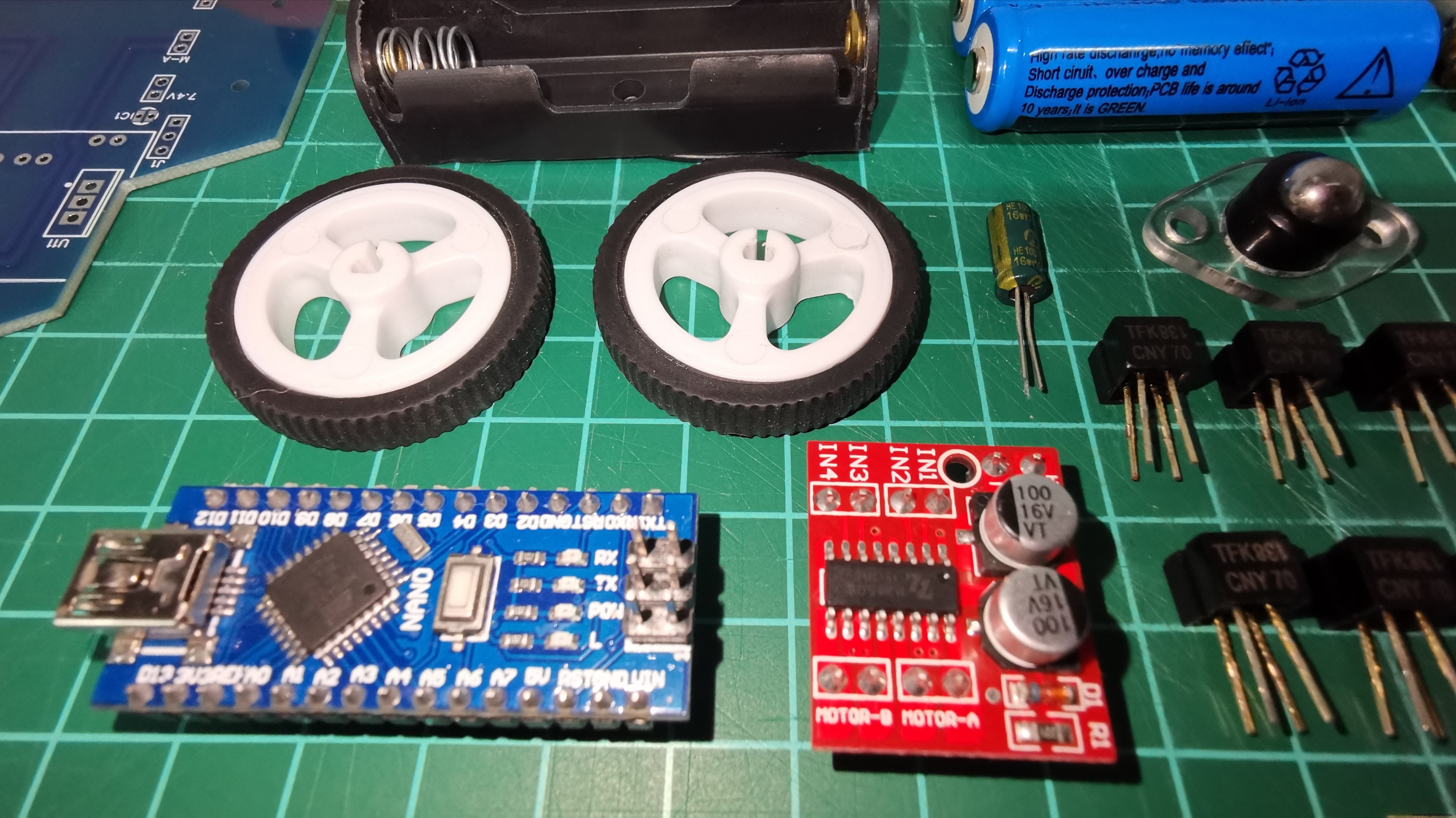
次のビデオでは、ミニモータードライバー(MX1508)を使用して実行されたテストを示しています。
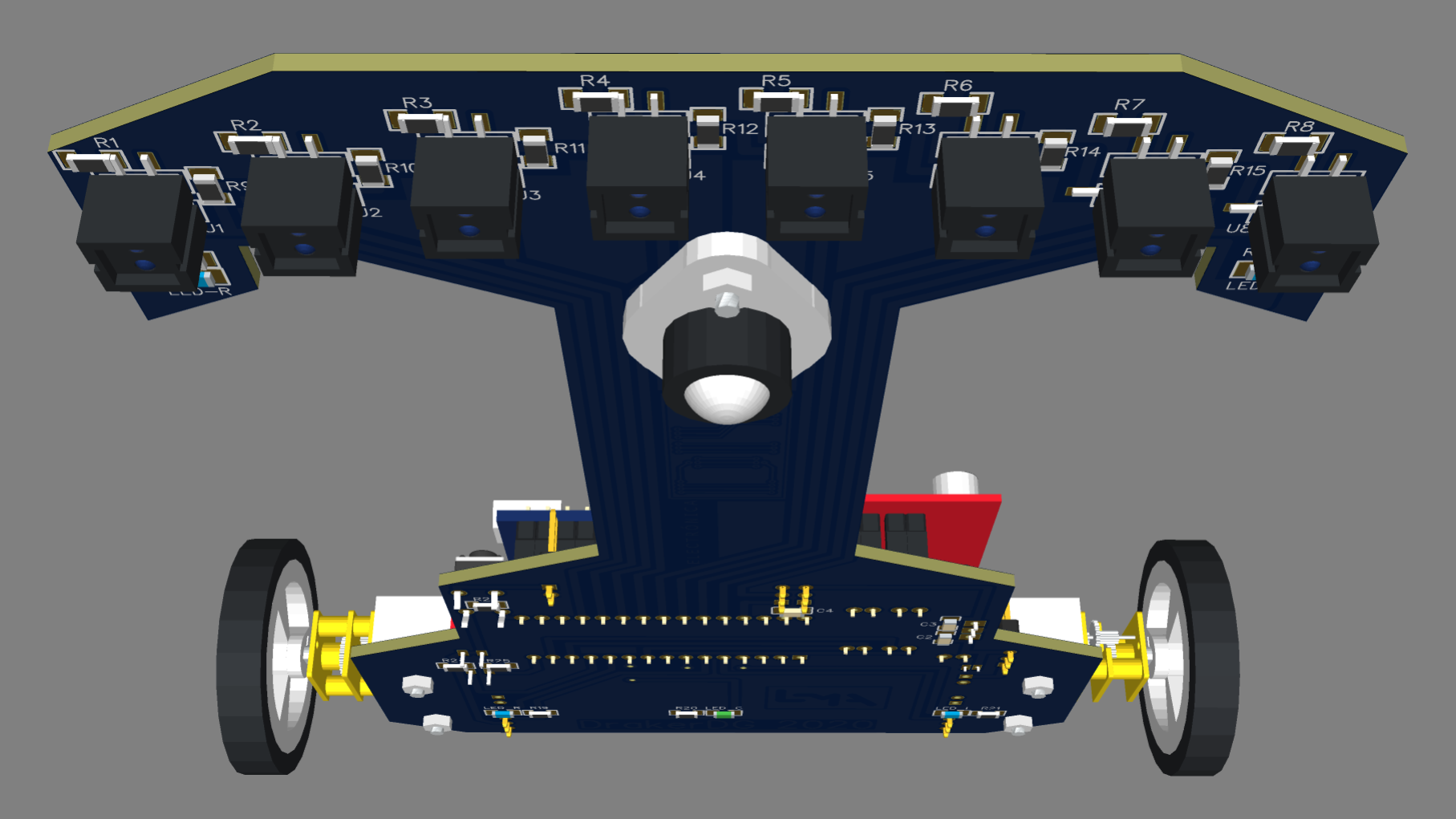
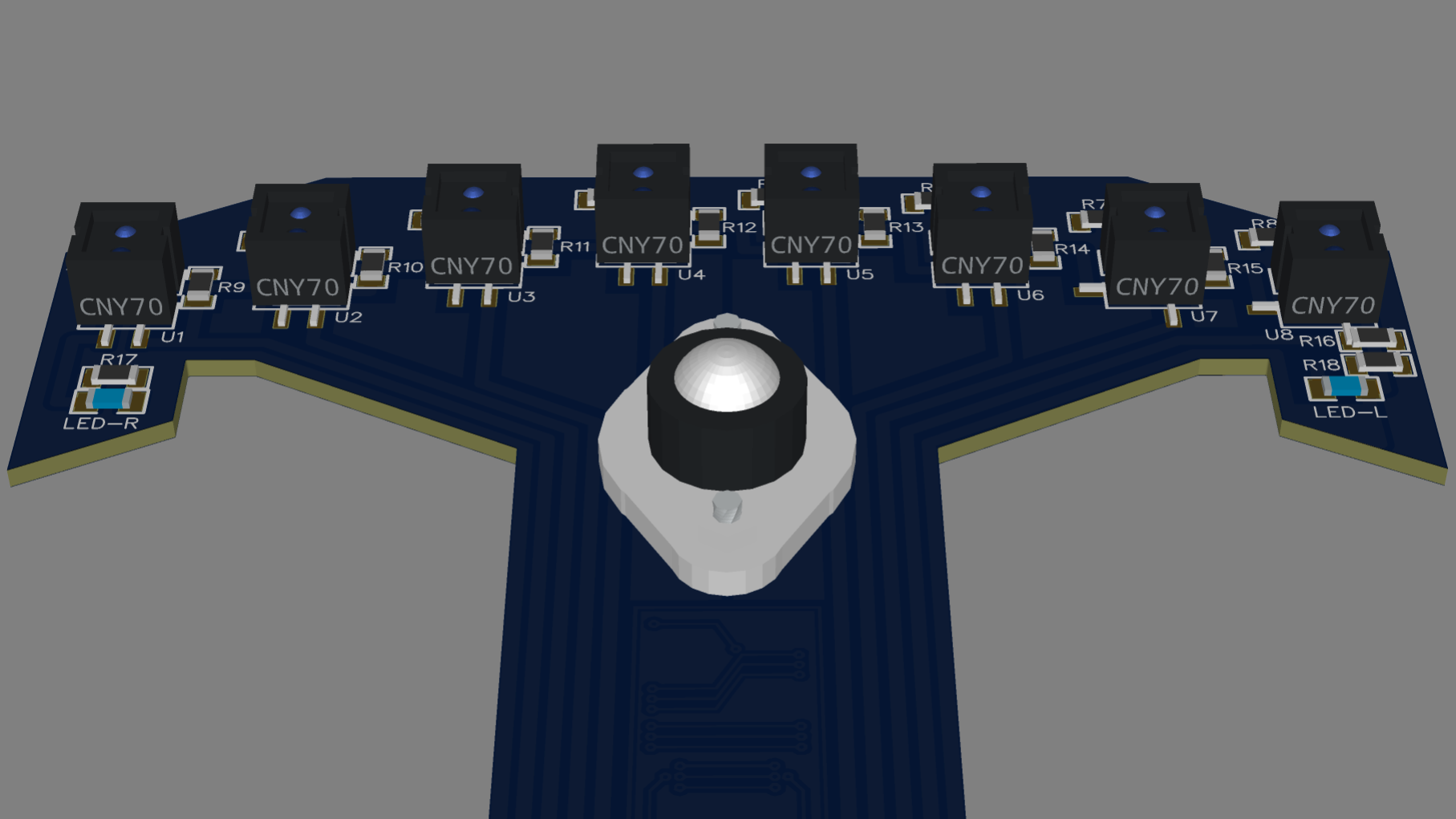
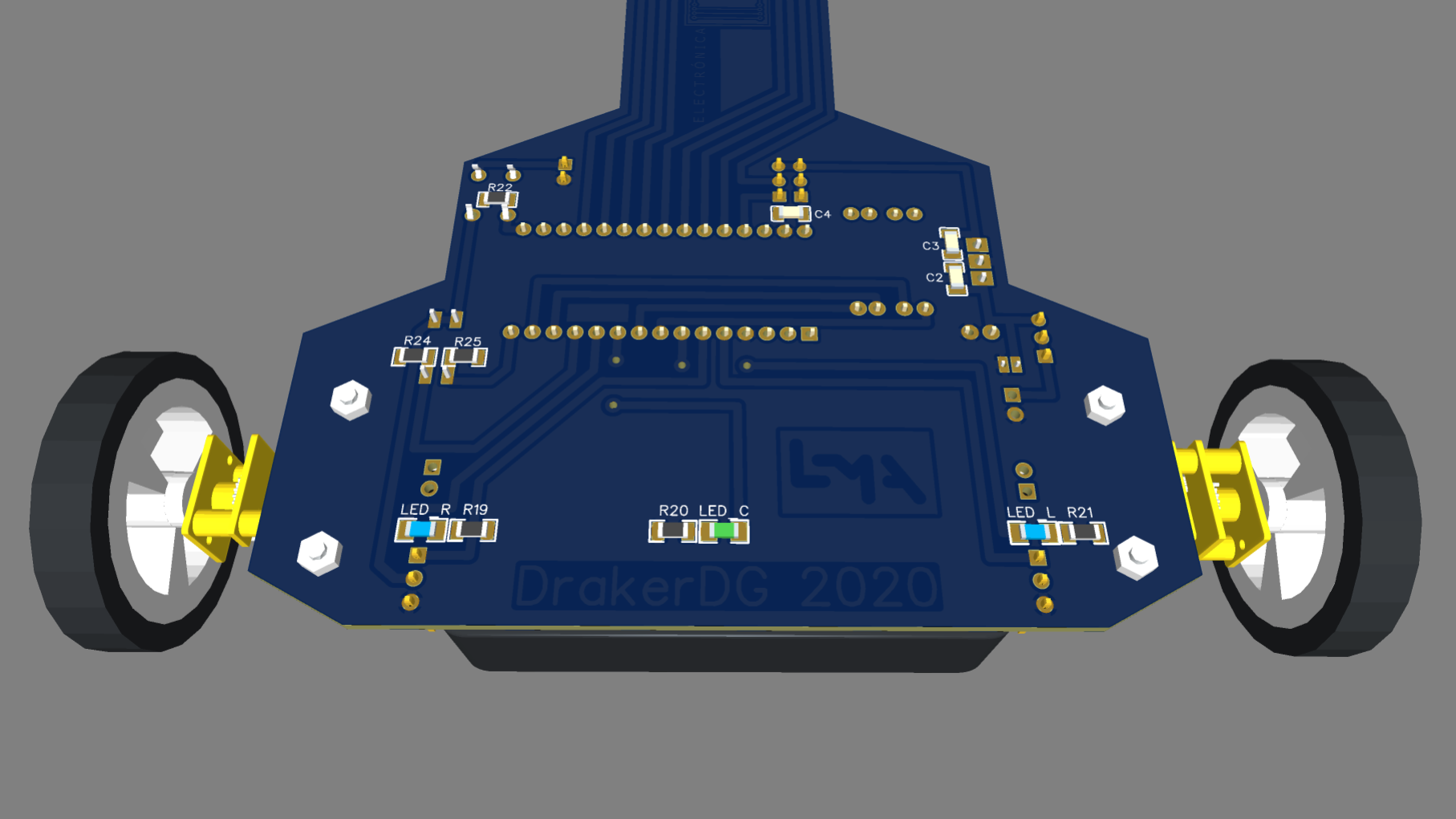
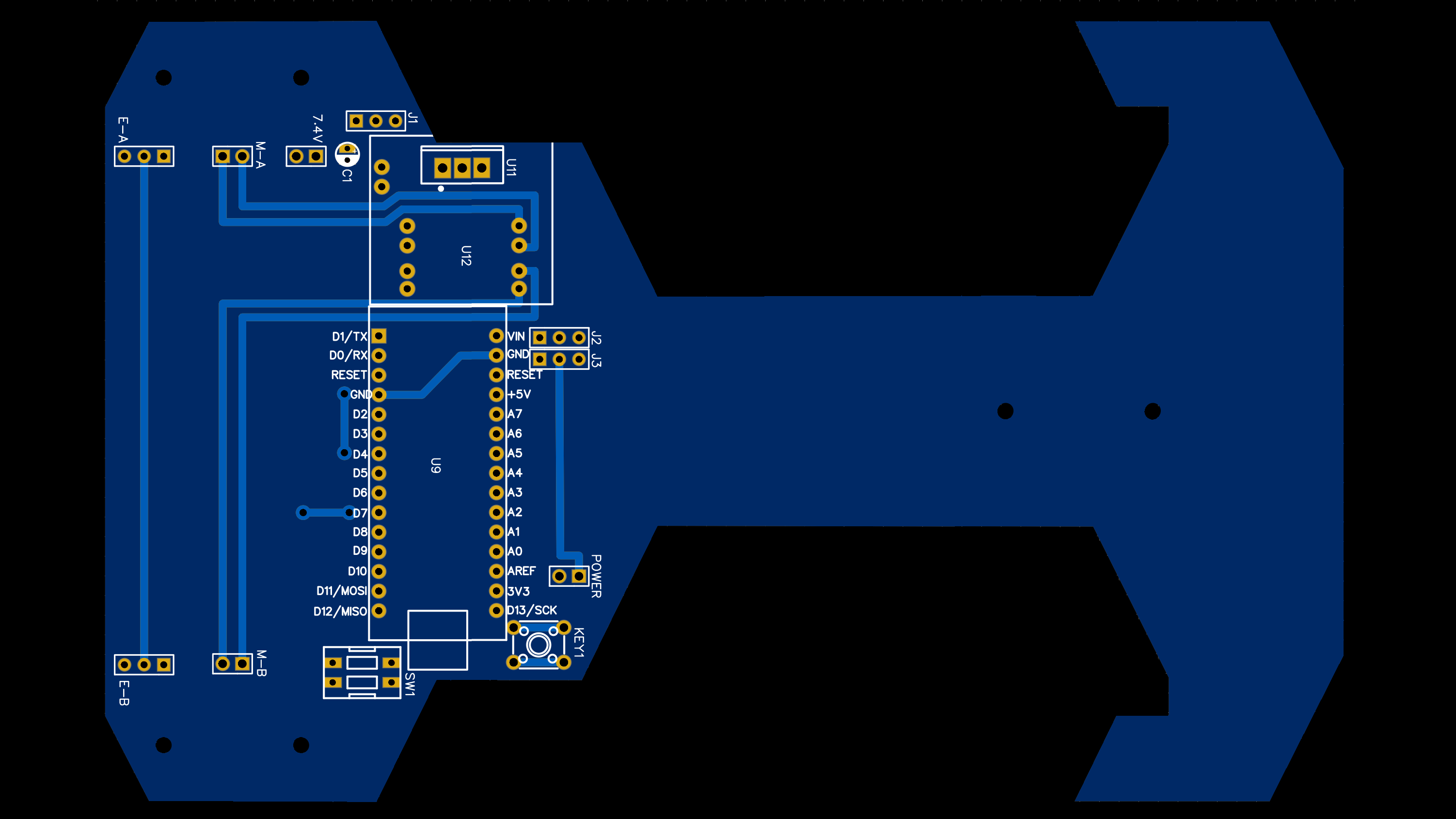
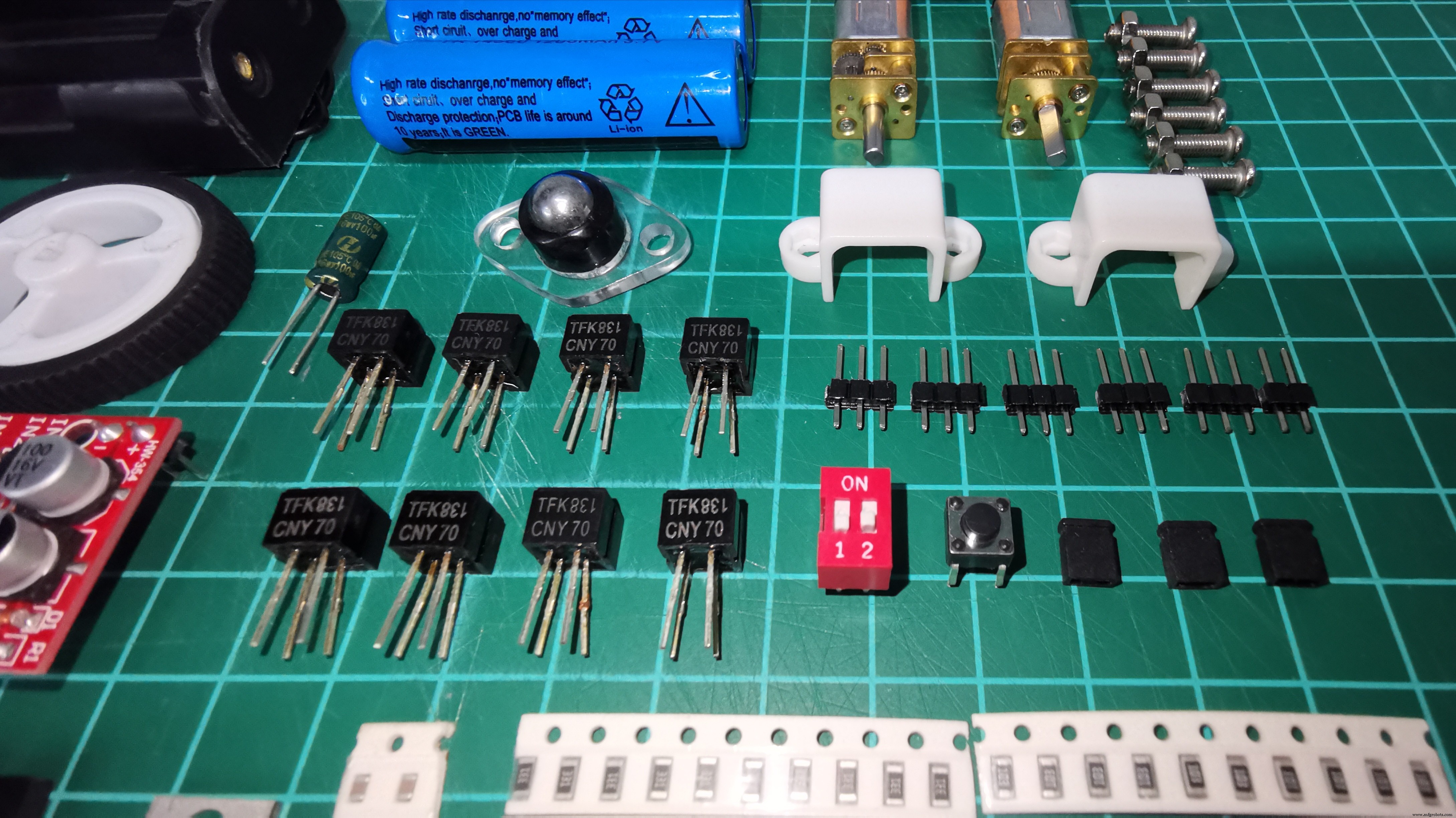
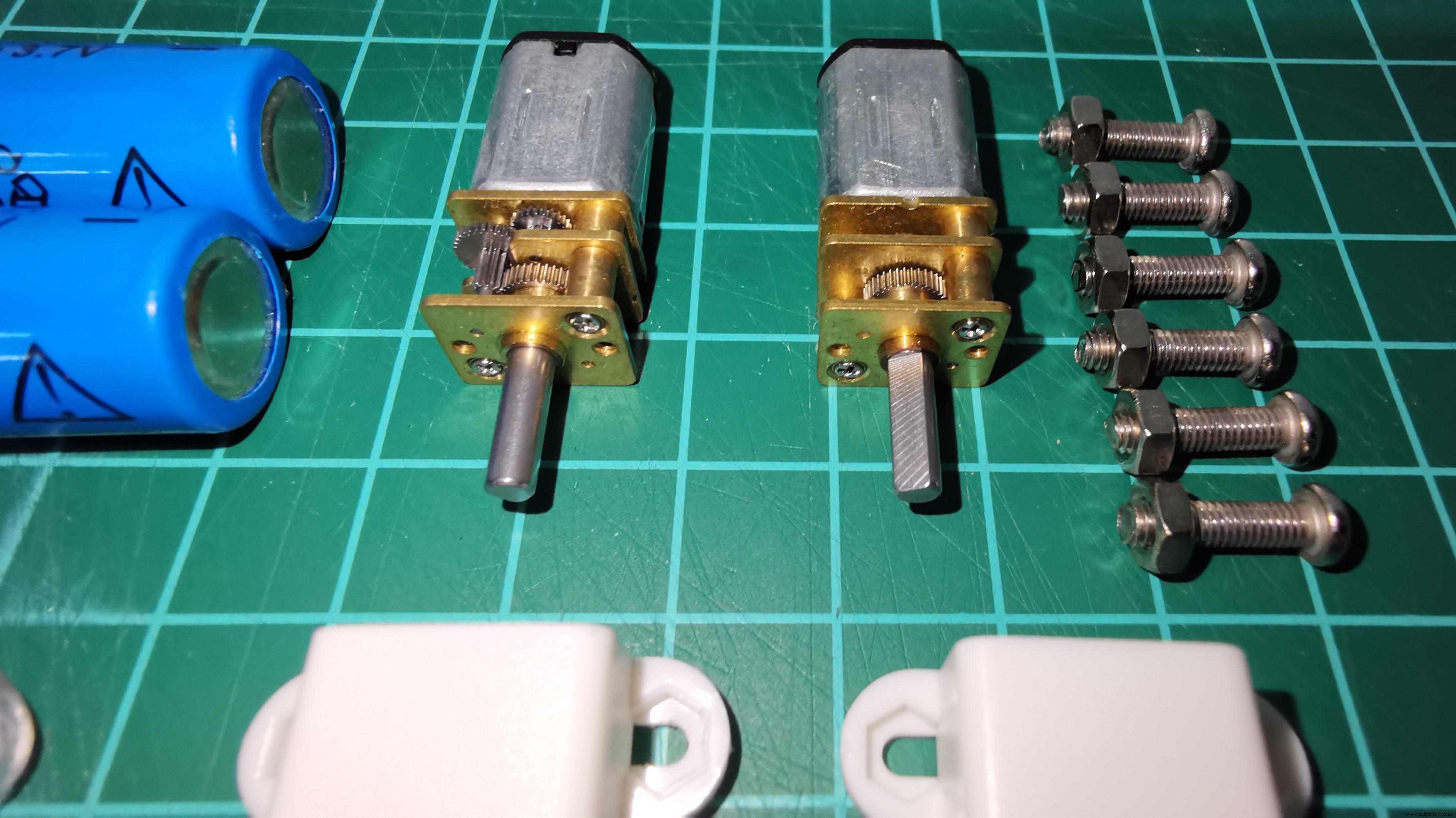
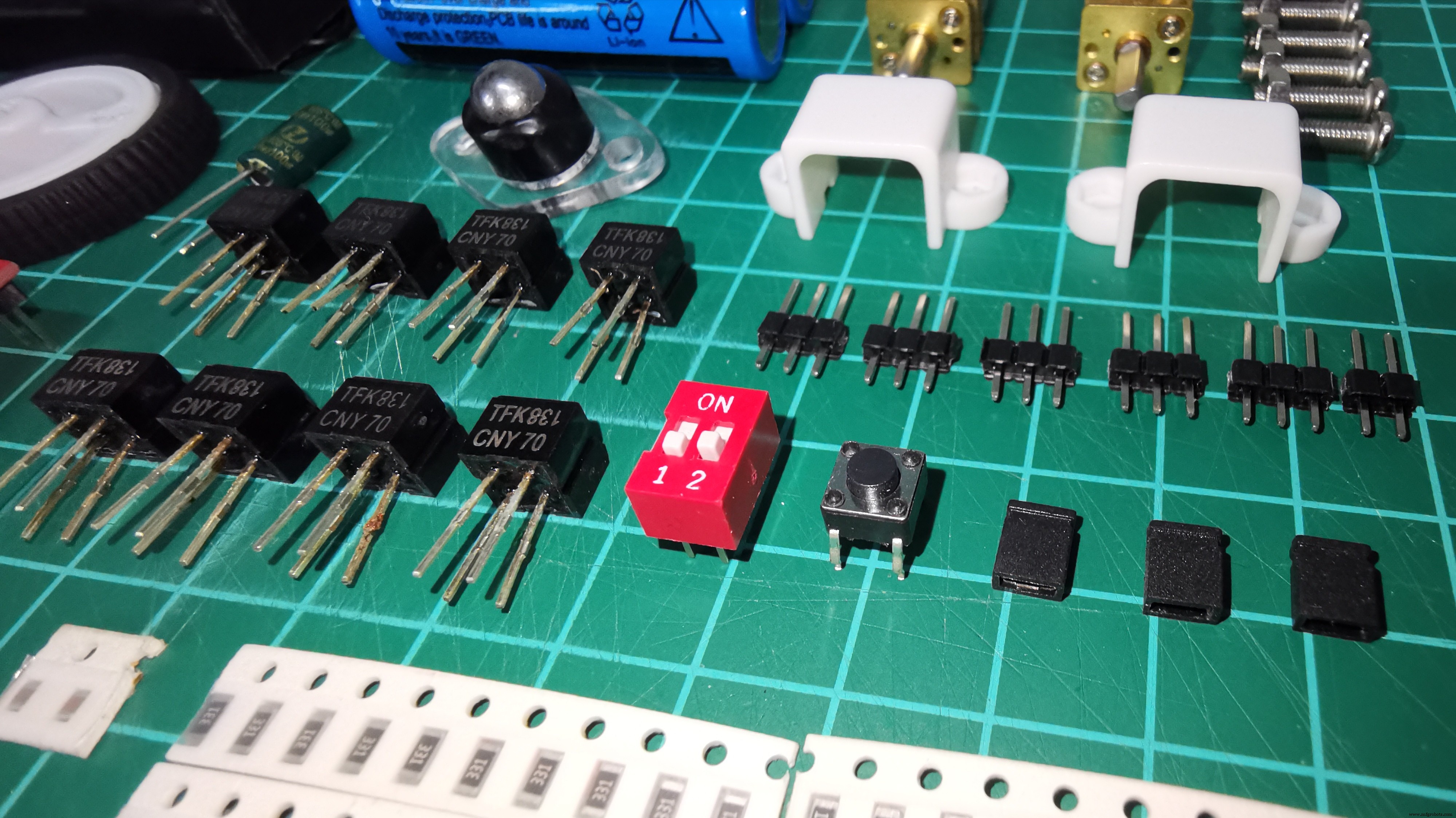
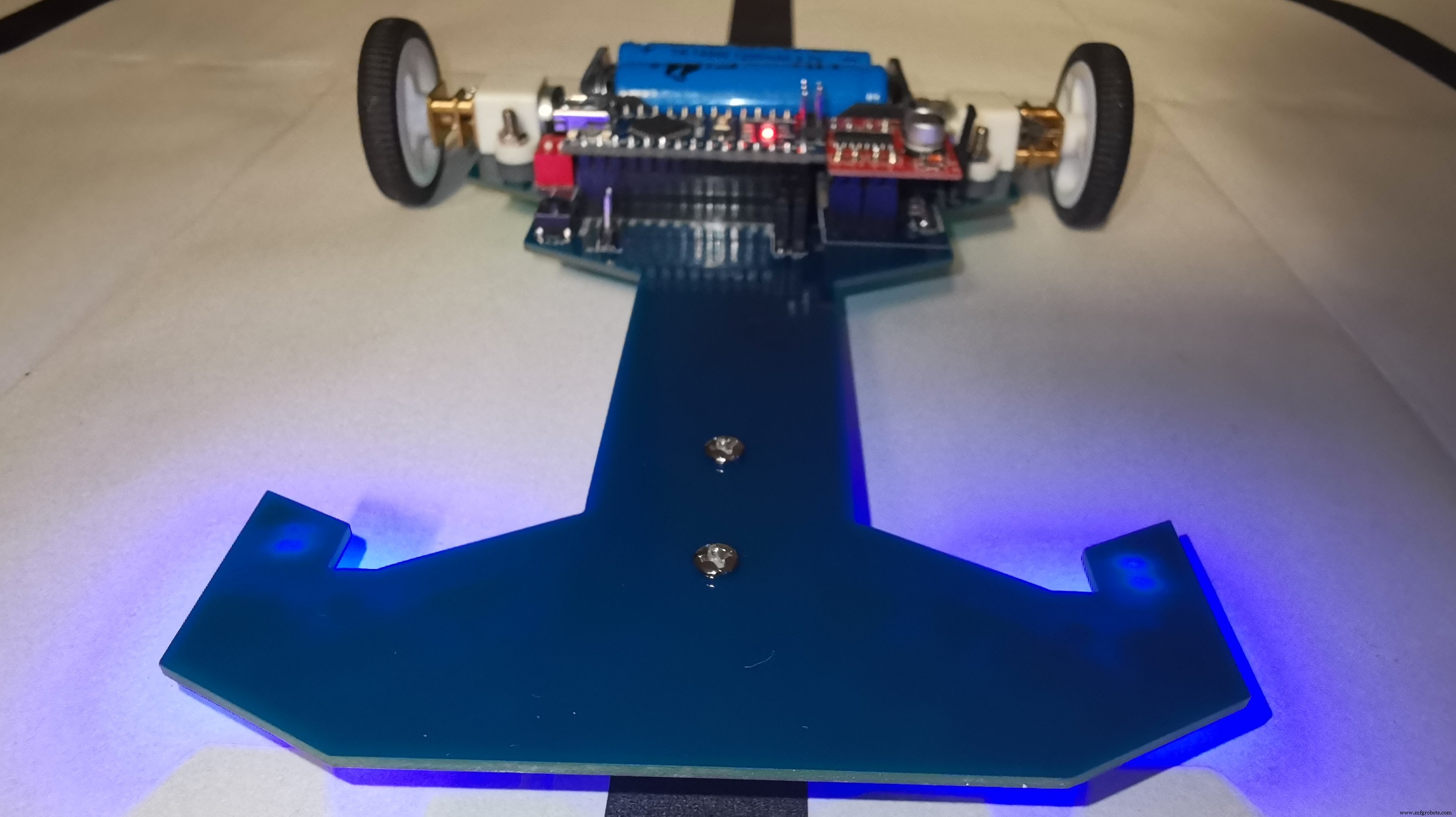
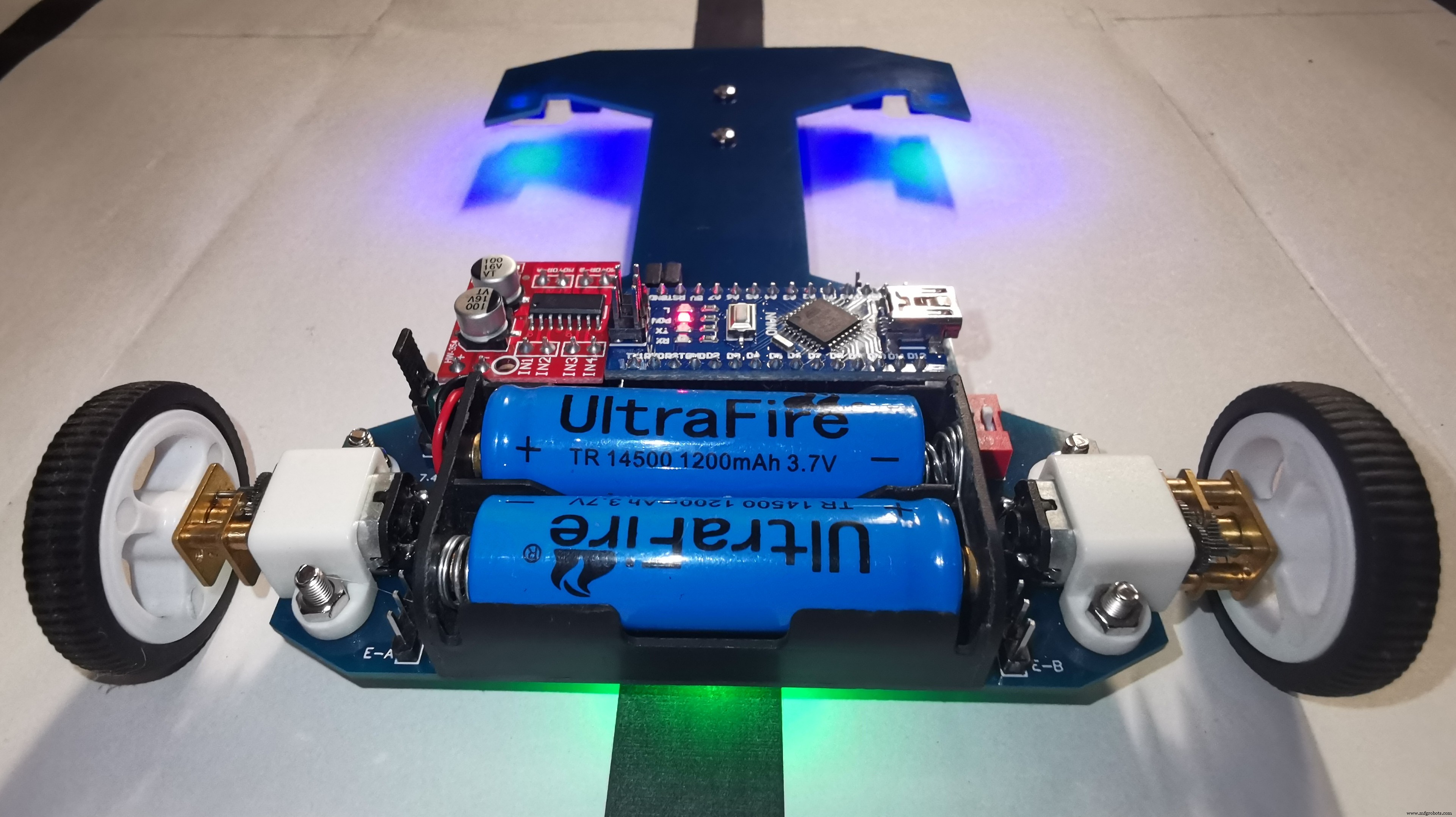
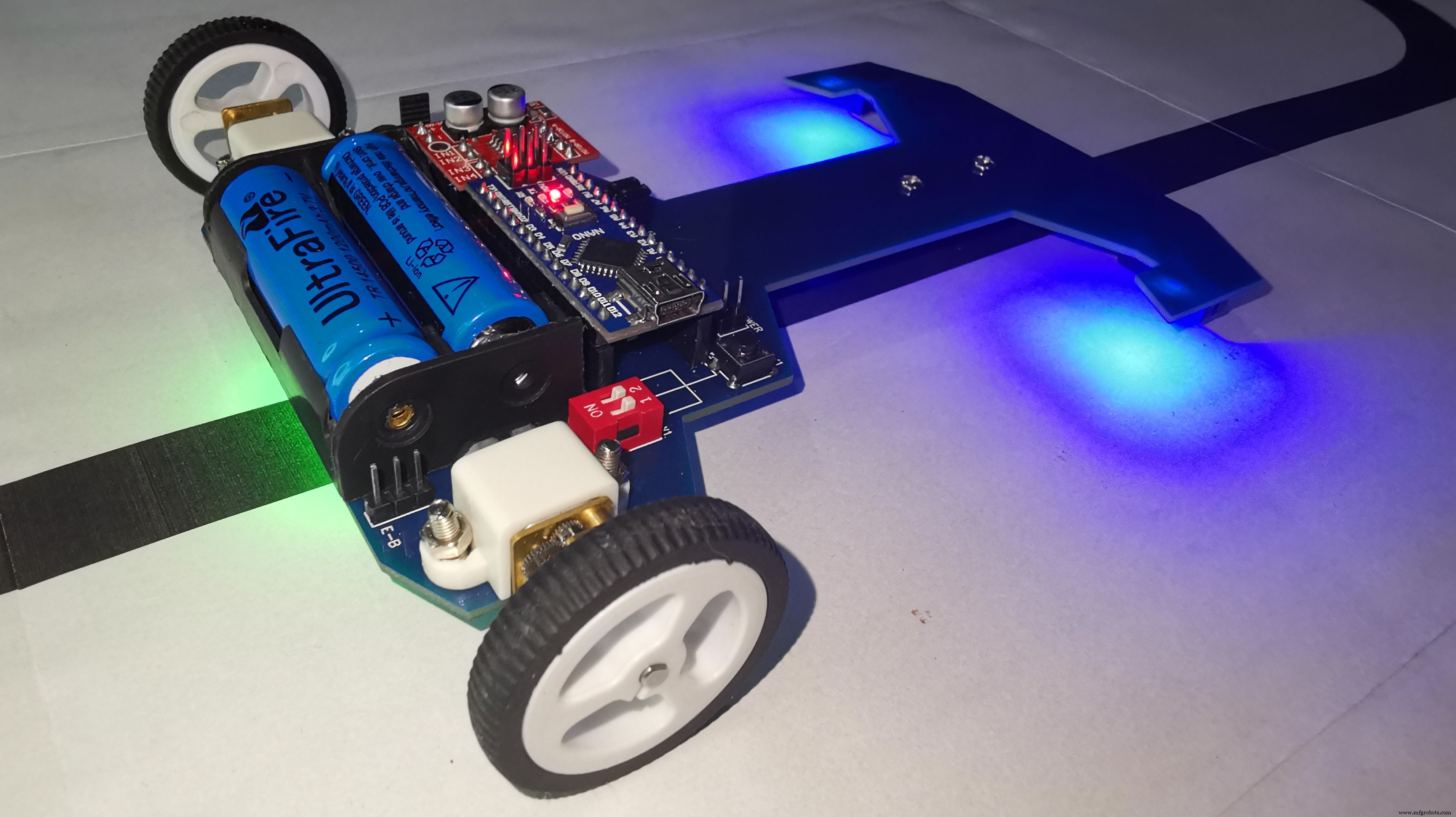
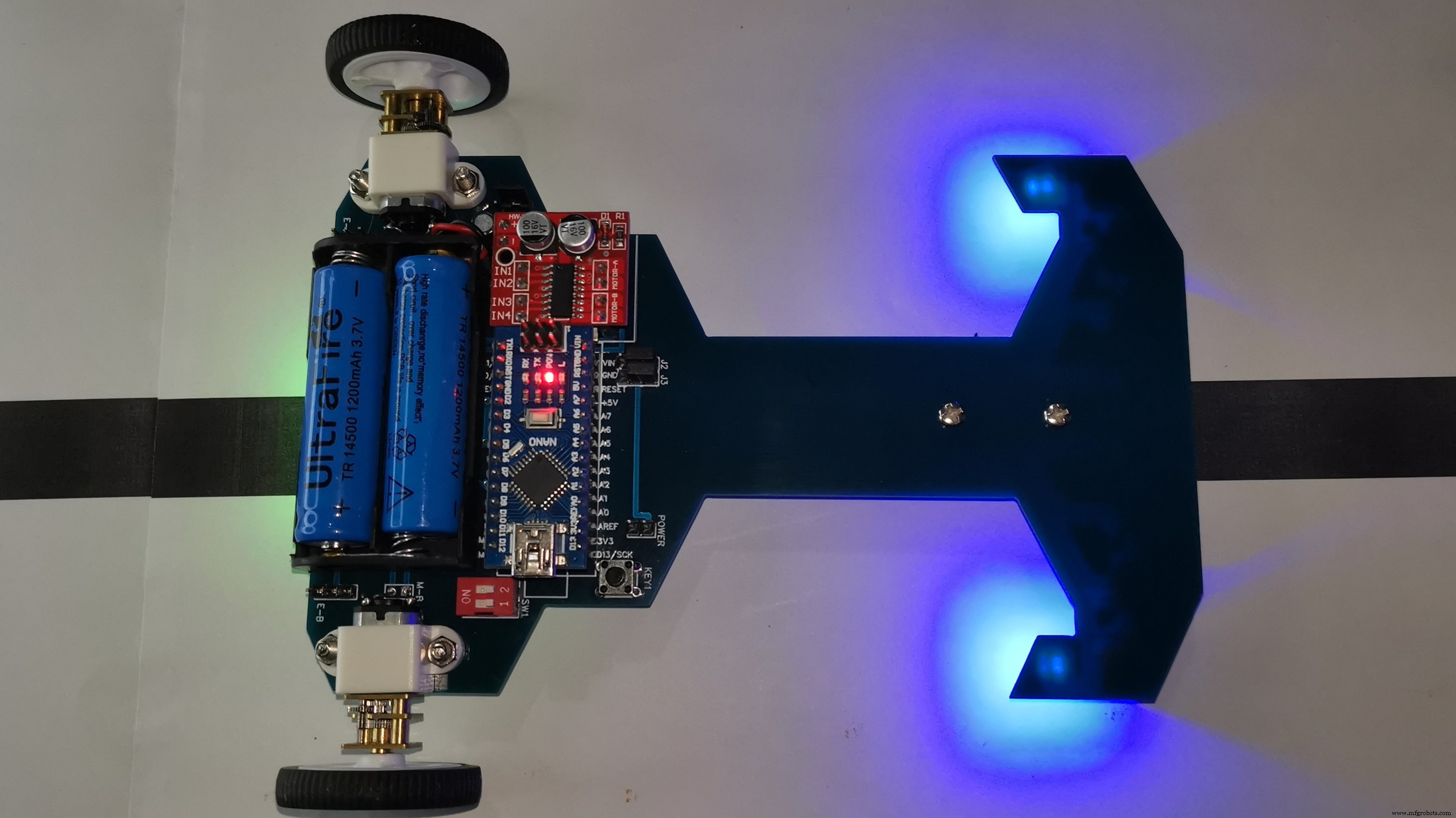
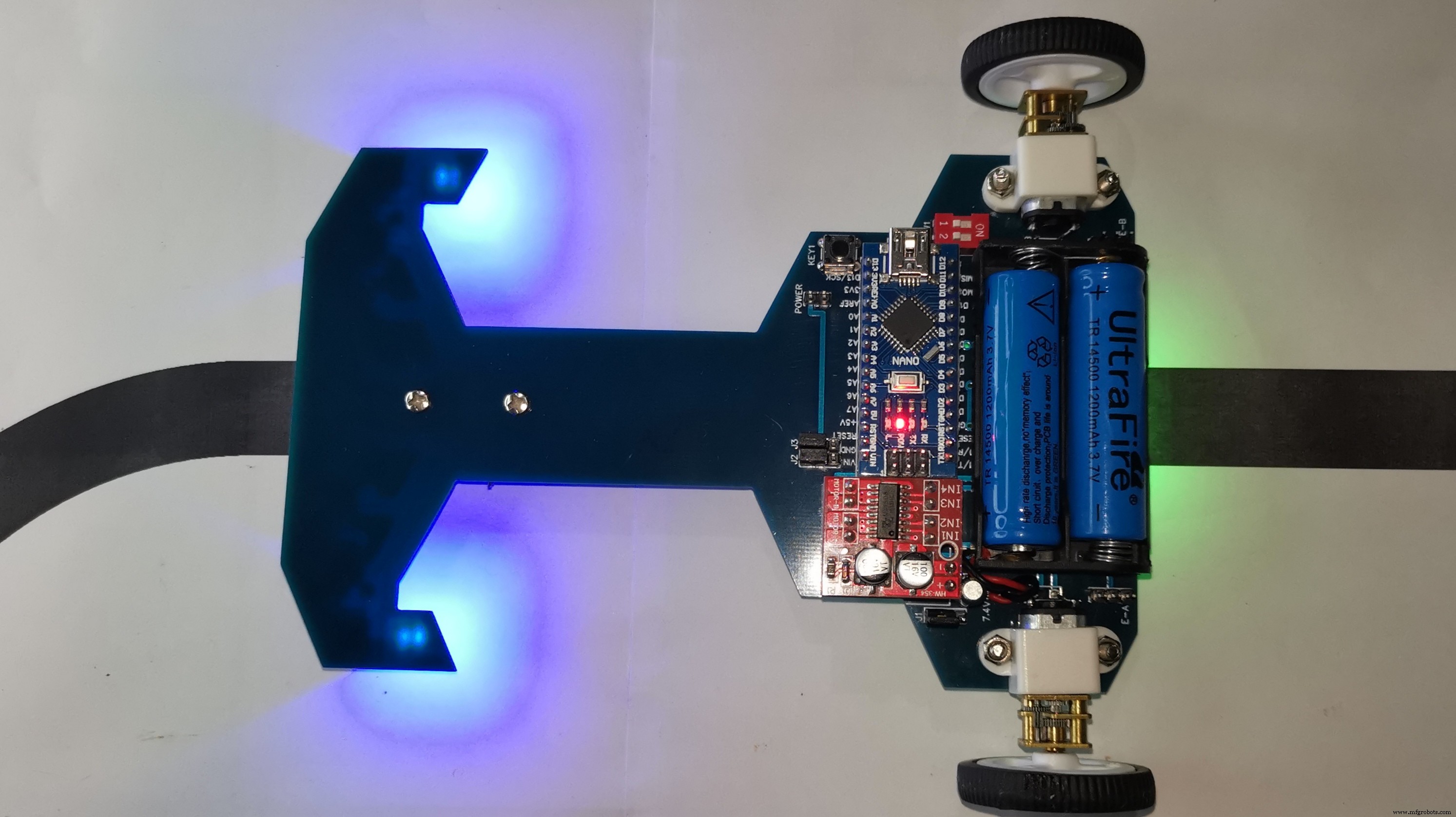
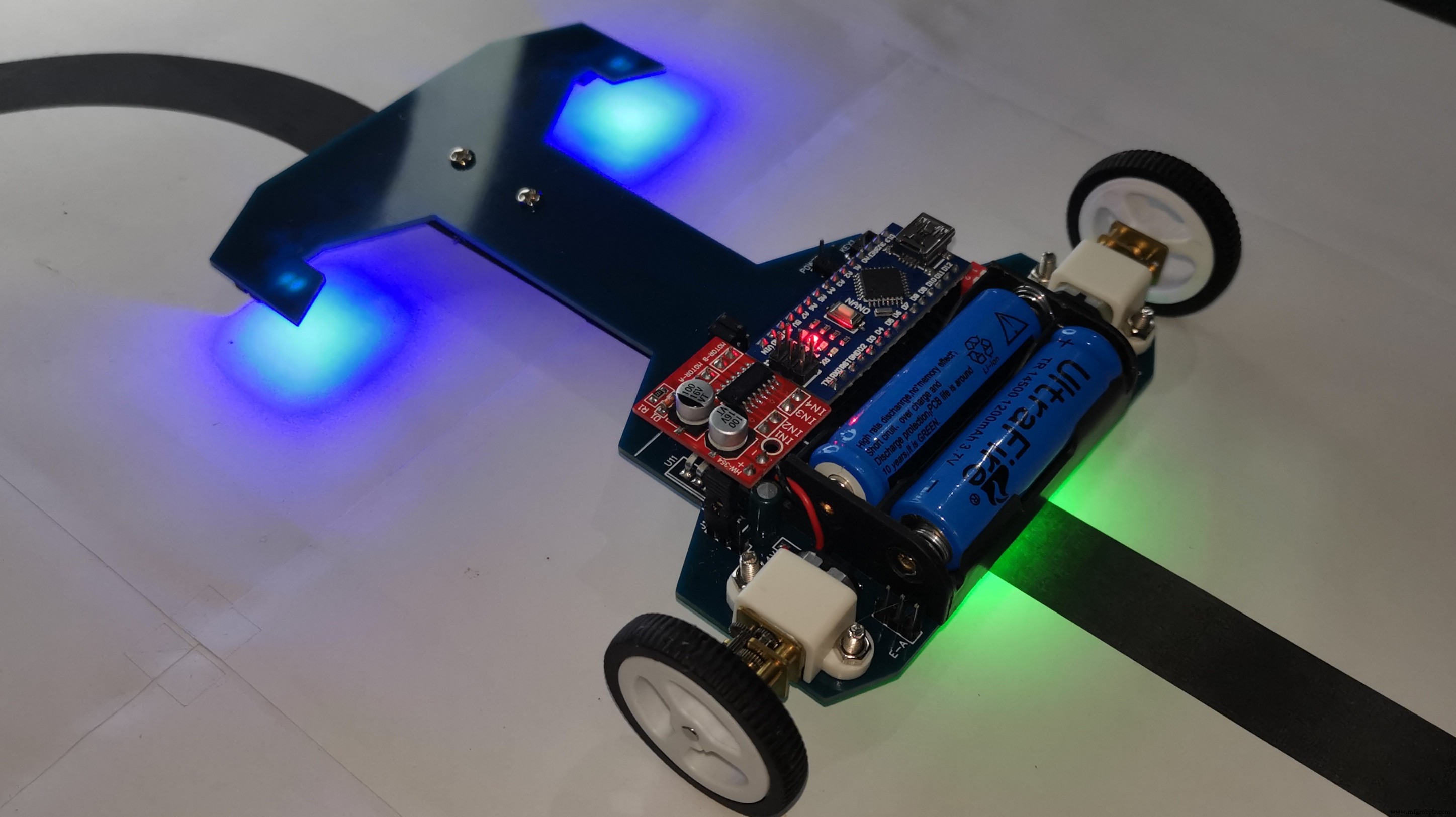
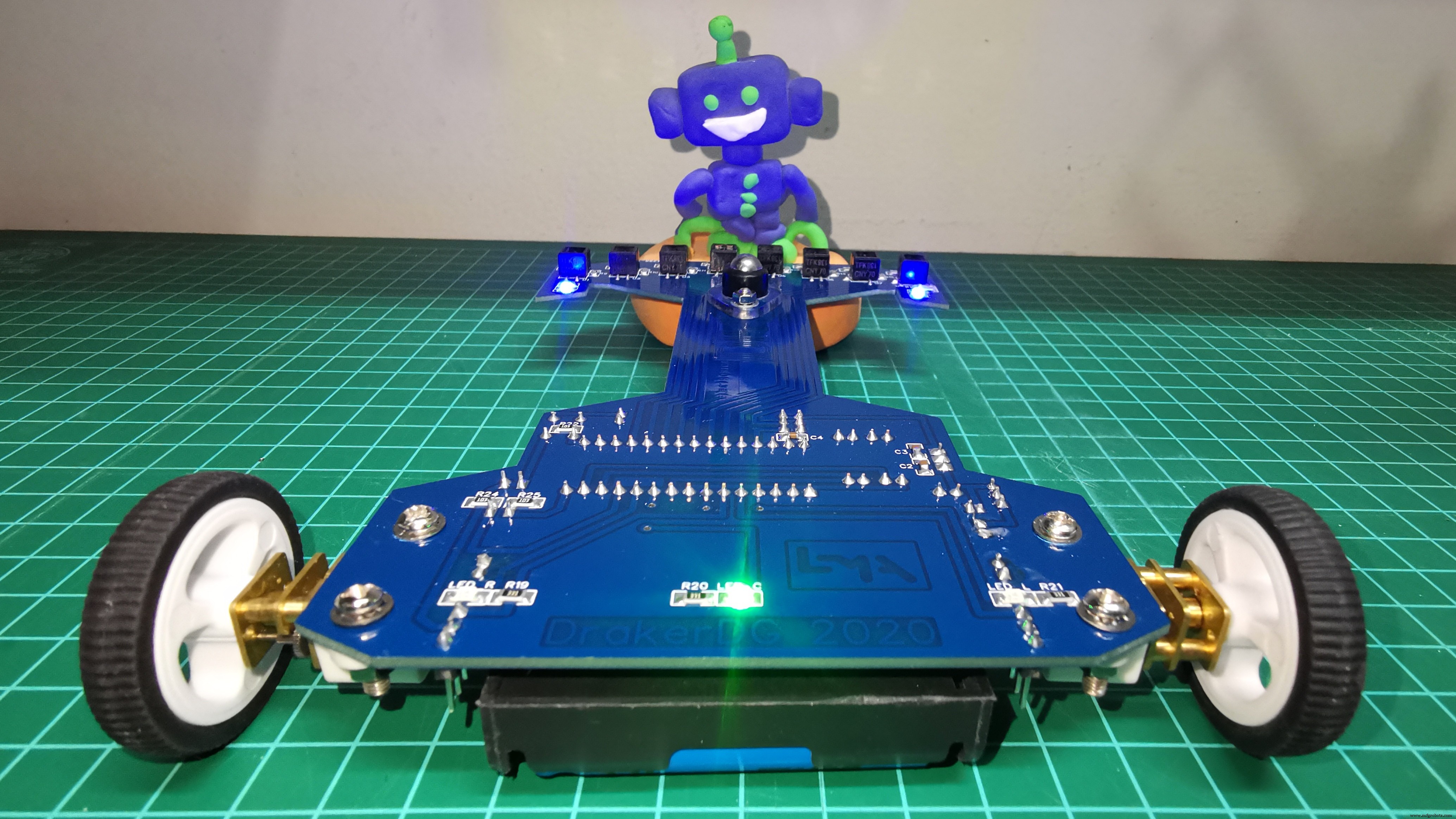
次のビデオでは、8つのCNY70センサーを使用したテストを示します。これらのセンサーは、ArduinoNanoのポートA0からA7を介して同様に測定されます。私は初期アルゴリズムを使用して、0から1000までの範囲を正規化することによってセンサーを較正します。ここで、0は白い背景を表し、1000は黒い線を表します。キャリブレーションが完了すると、ループに入り、読み取りサイクルを開始し、0から7000までの位置を計算します。これは、それぞれ左センサーから右センサーを表します。この位置の値は、比例誤差Pを計算するために使用されます。Pの範囲は-3500(左)から3500(右)で、0が中心値です。アルゴリズムは、黒い線を検出した最後のセンサー(左または右)の位置の値を記憶します。これは、このデータをブレーキ動作と線の回復に使用することを目的としています。
回路を95%取り付けた最終テストを次のビデオに示します。最大消費量が200mAの最後のアンペア数テスト。
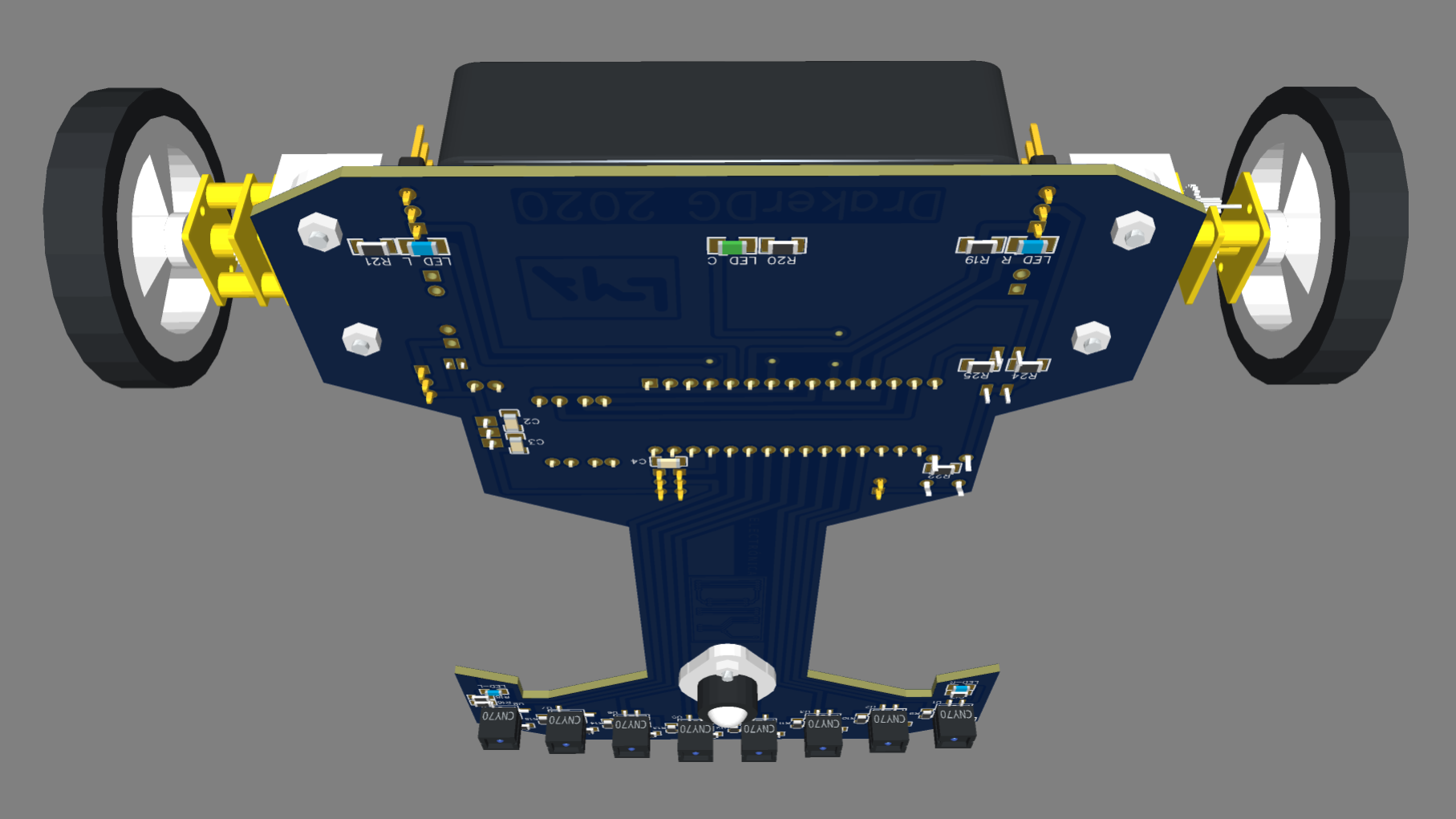
これはロボットのプリント回路の最新バージョンであり、JLCPCBで製造する準備ができています。
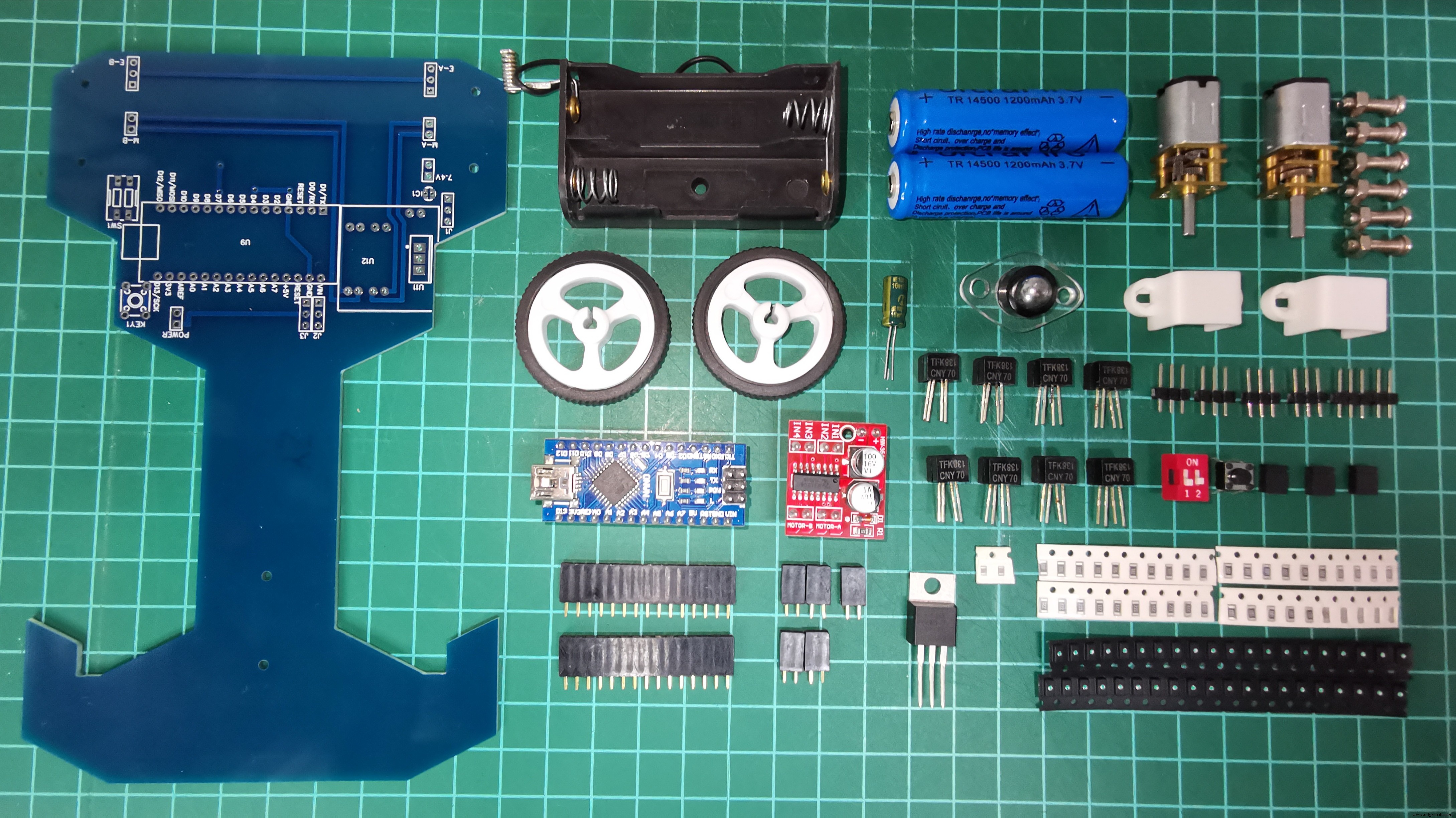
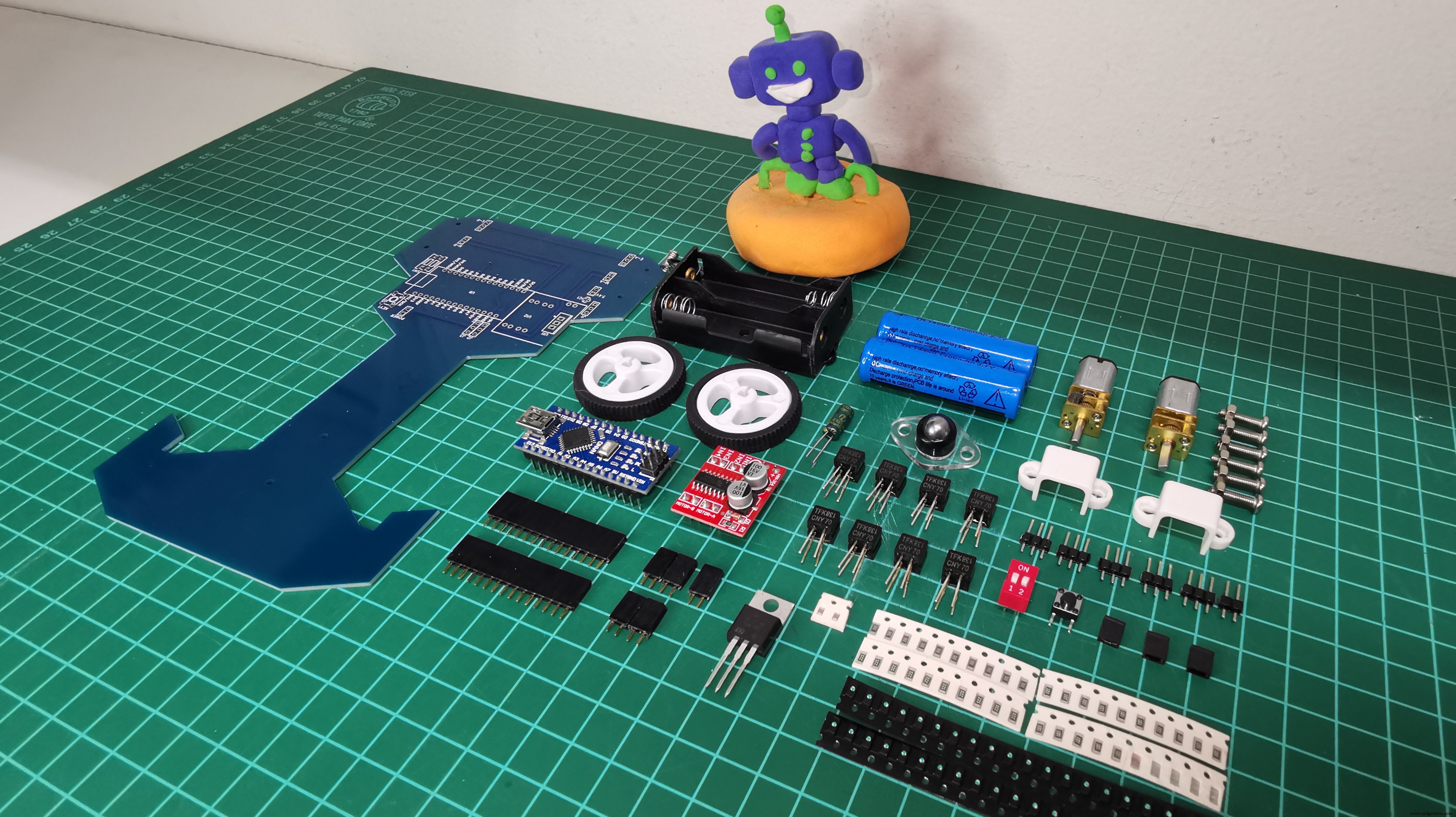
これが開箱です。




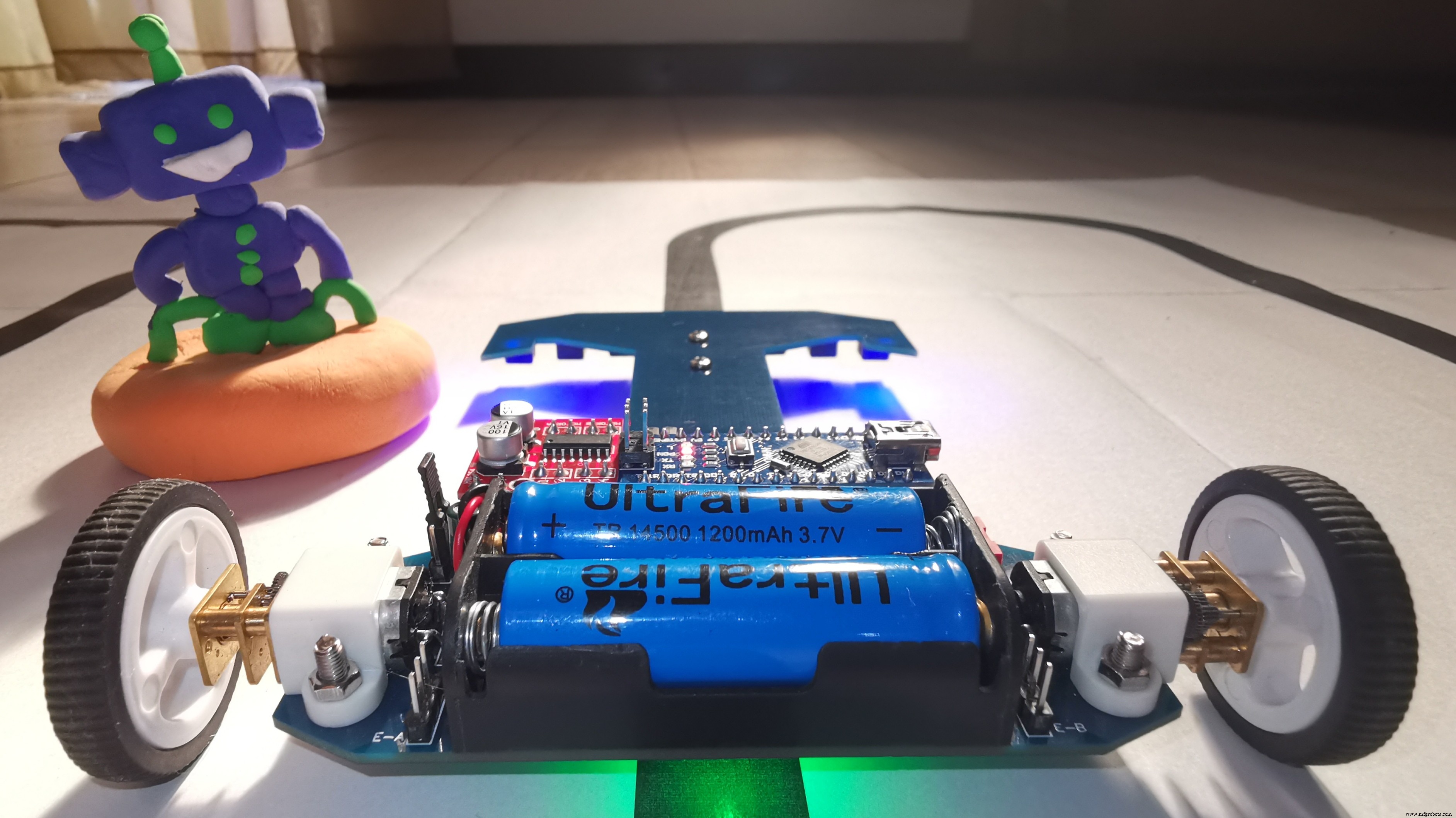
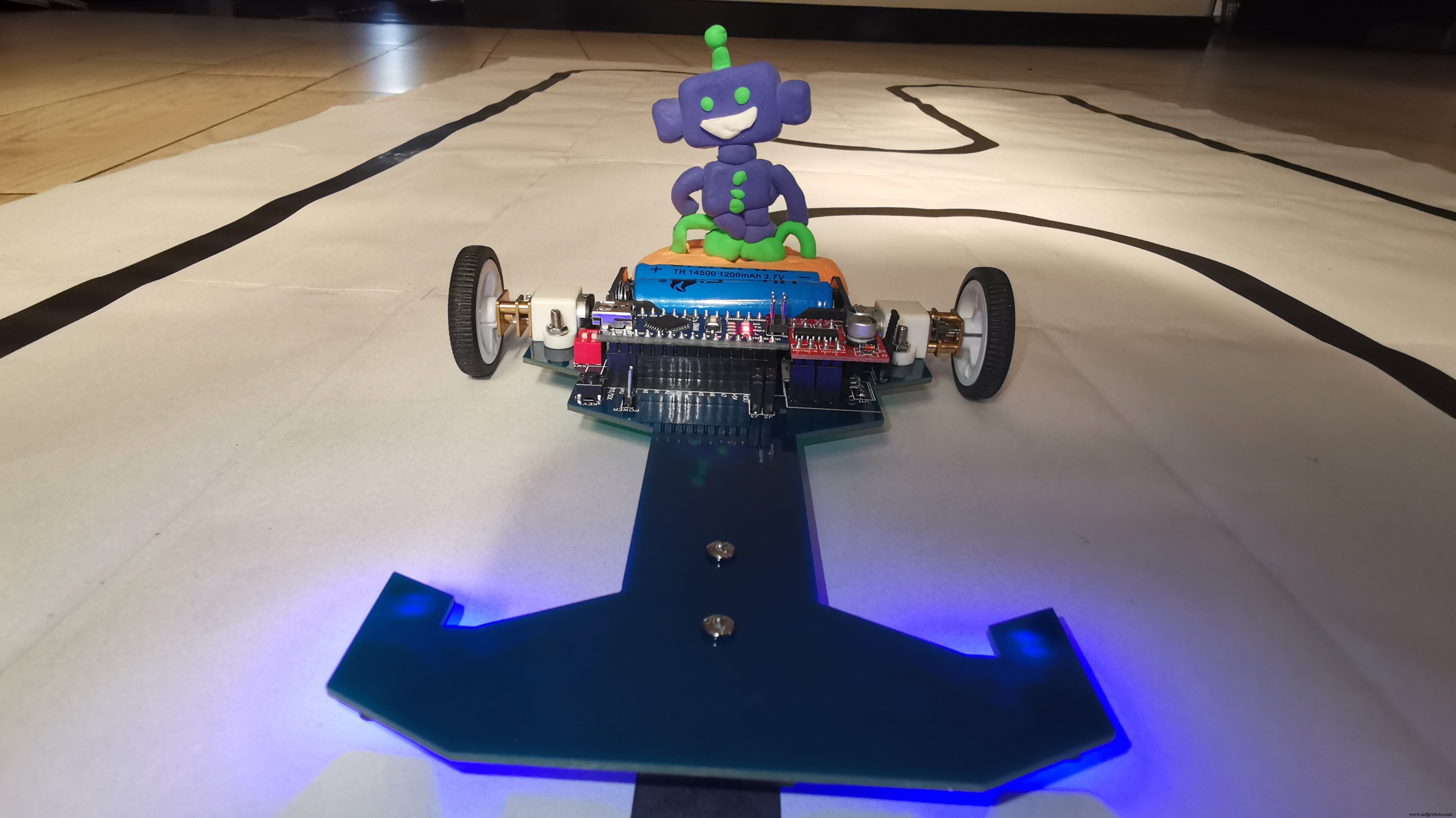
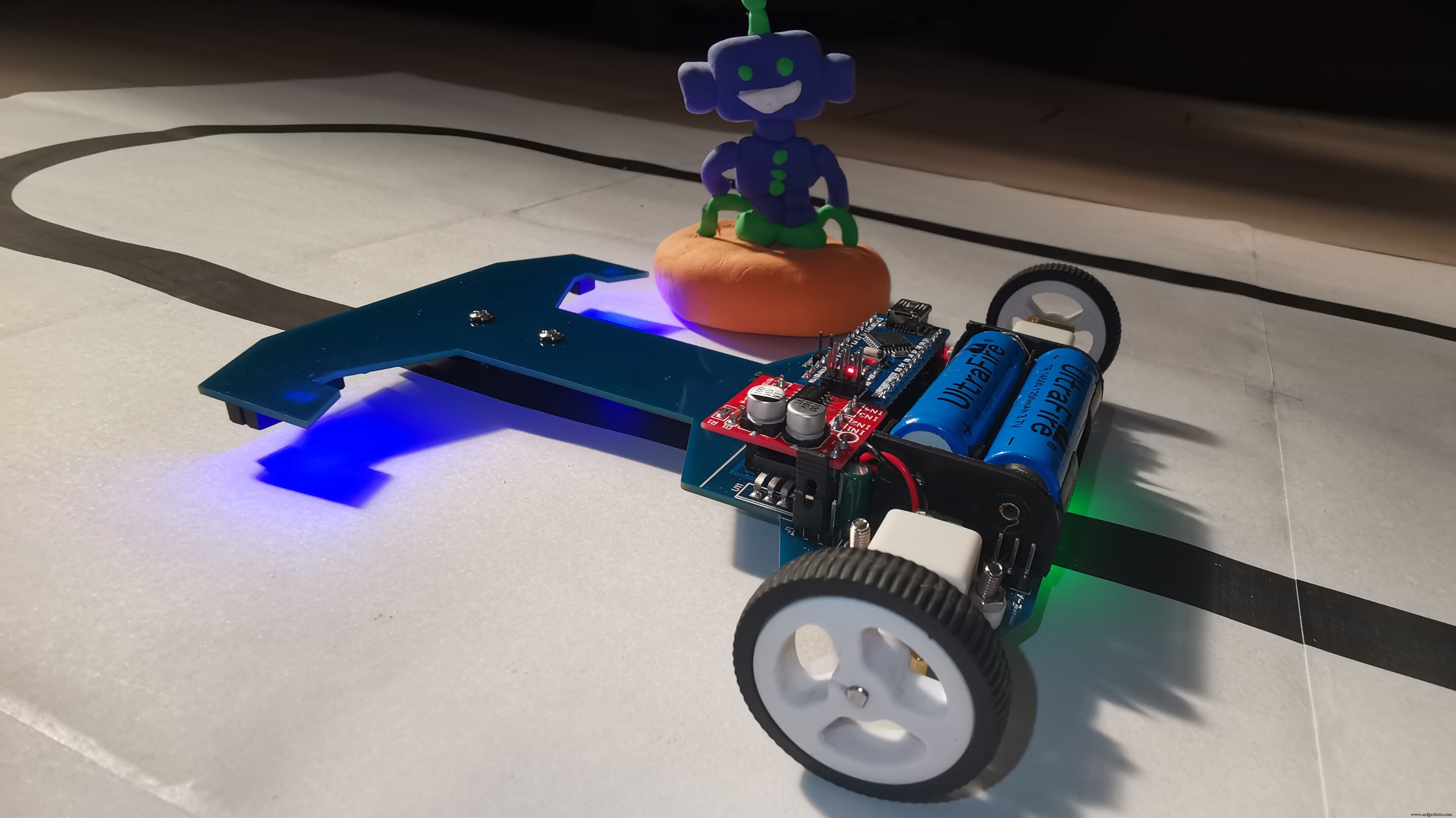
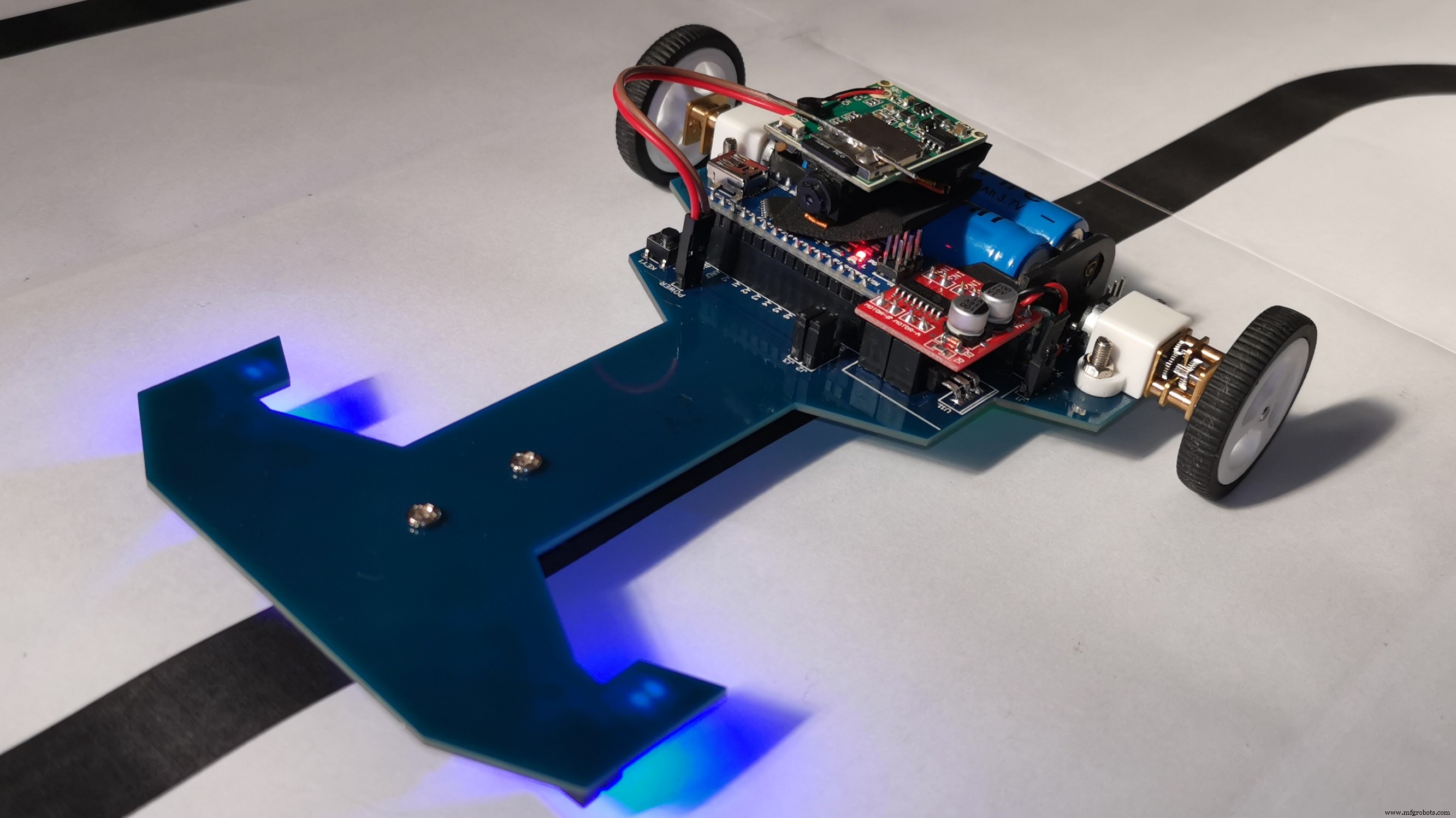
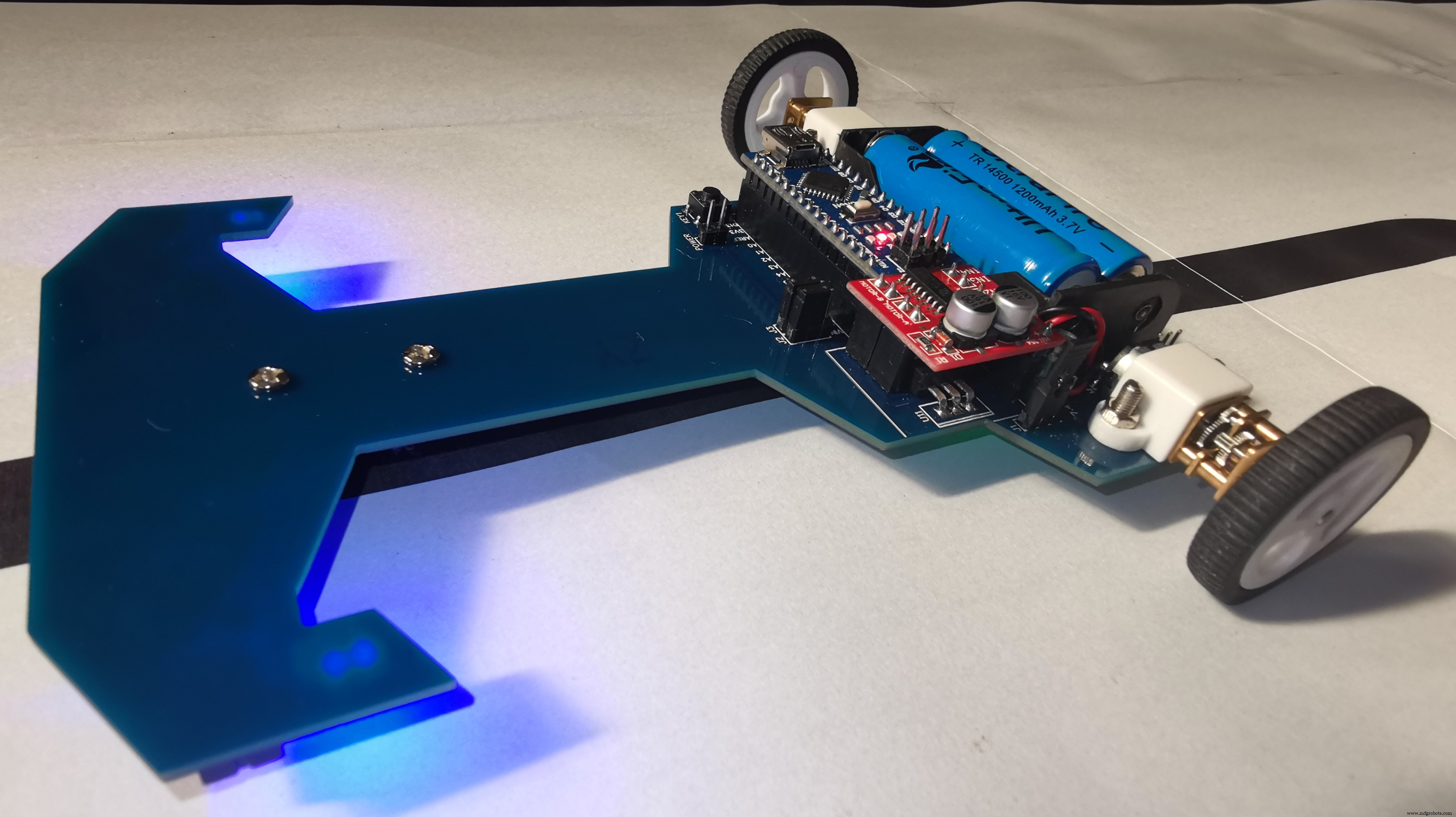
最後のストレッチで、すでに合計のピースで、最初のスピードフォロワーロボットの組み立てを示します。
最後に、多くの努力を払って、私はすでに完全に構築されたプロトタイプを持っています。コードをロードする方法(コードロードモード)、センサーをテストする方法、そしてもちろんトラックでのテストを以下に示します。操作に非常に満足しており、テストコードはコードを非常にうまく制御することができます。私はPID(フル)アルゴリズムを使用して修正をスムーズにし、ラインのコースを取り戻しました。すべてを改善できるので、より効率的なバージョンを実現するために、引き続きコードを試してみます。


補足として、Webotsアプリケーションでこのロボットのシミュレーションを行いました。まだ改善中ですが、このビデオを共有して、仮想環境でロボットを制御するための機械的および論理的テスト(コード)を実行する方法を理解し、物理的に構築されたロボットの動作を理解するのに役立てます。
コード
スピードラインフォロワーロボットV4を制御するためのコード
https://github.com/DrakerDG/Speed-Line-Follower-Robot/commit/12a807aed92c570dce12452064a5d6fe5053cb71 回路図
製造プロセス