


Arduinoでゴキブリを30ドル未満でコントロール
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 |
このプロジェクトについて
<図> 
数年前、Backyard Brainsのスマートフォンで制御されたゴキブリを見ましたが、それは私を驚かせました!お母さんに買わせようとしたのですが、ゴキブリの話で納得しました。 :)私は数年後にArduinoでプロジェクトを始めました。ゴキブリの実験をどれだけやりたかったのかを思い出したので、ゴキブリはまったくグロスではないと彼女に確信させました。それから私はマダガスカルのヒスノイズゴキブリをいくつか注文しました。彼らが到着したら、私はコーディング、テスト、再コーディング、再テストを開始しました。最後に、このビデオで見るように、すべてを正しく行い、ゴキブリの行動を一時的に変更する方法を見つけました:
これはおもちゃではなく、神経科学を教えるための科学実験です。これは、人工内耳を装着している人に似ています(324,000人以上に聴力が戻っています)。ゴキブリは、失われた触角や手足を再生することができます。このプロジェクトのゴキブリは、「手術」中に完全に麻酔されました。私がしたことはすべて可逆的であり、実験の終わりに逆転しました。また、このプロジェクトではシアノアクリレート(スーパーグルー)を使用しましたが、ベトナム戦争で人間の傷を封じるために同様の化学物質が使用されたため、害はありません。
ステップ1:仕組み
それはどのように機能しますか?多くの昆虫と同様に、ゴキブリにはナビゲーションに直接関与する触角があります。 Arduinoからの可変周波数(神経信号を模倣する)でアンテナを刺激することにより、ゴキブリに壁がないときに壁があると思わせることができます。それが起こると、ゴキブリは別の方向に向きを変えます。しばらくすると、ゴキブリは刺激を無視し始め、バックパックがないかのように歩き続けます。
ステップ2:材料 <図>
 <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図> 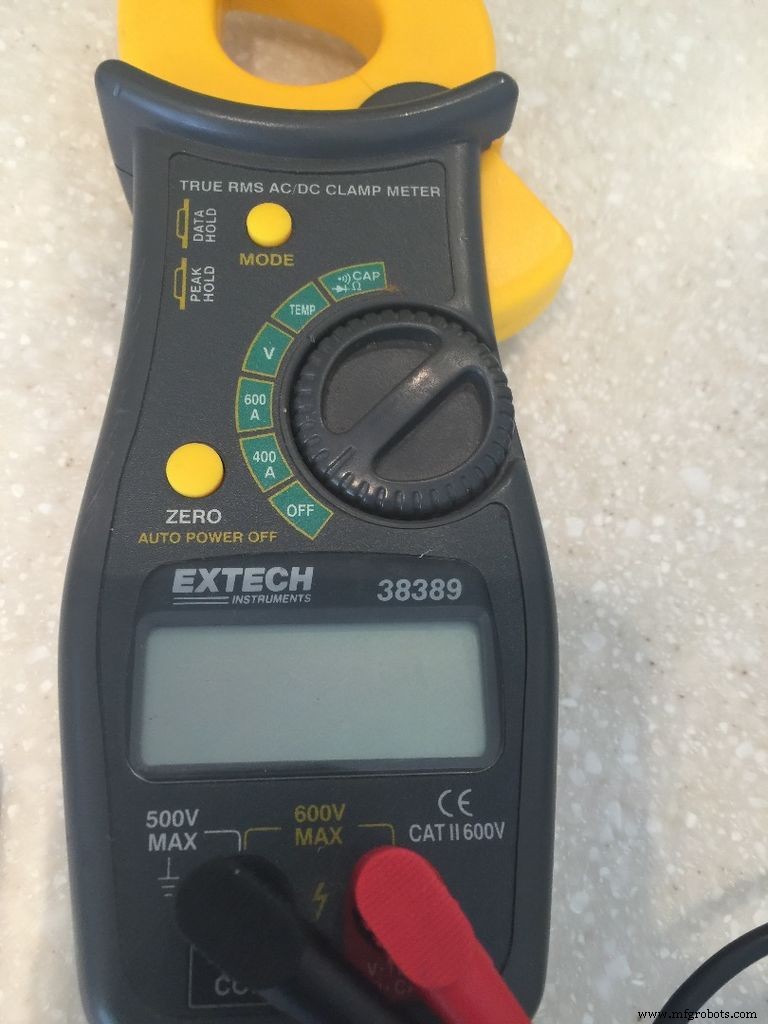 <図>
<図> 
パーツ:
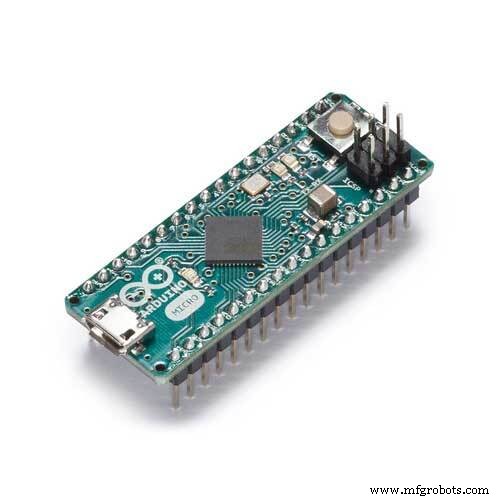
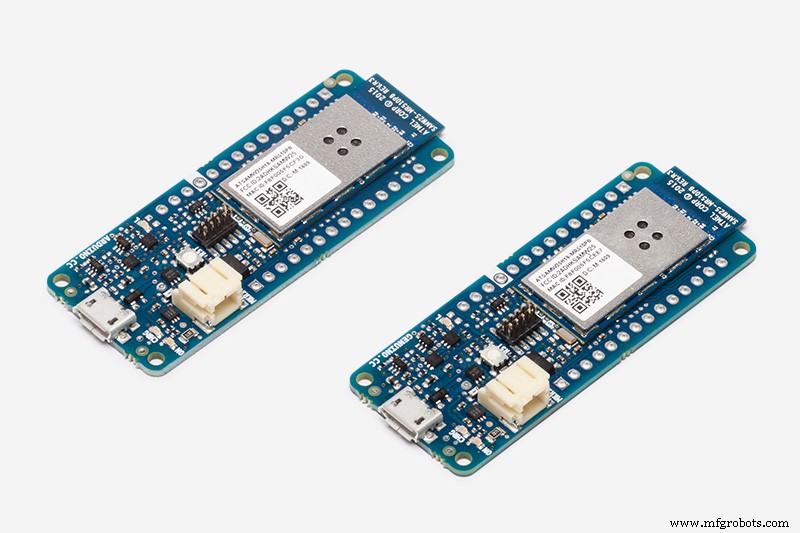
- ArduinoMicroまたはMKR1000 $ 20
- MKR 1000 $ 2を使用している場合は、12VA23バッテリーまたはコイン電池
- A23バッテリーホルダーまたはコイン電池ホルダー(または独自に作成するためのアルミニウム)
- ピンコネクタ
- 細いワイヤー(より線から私のものを取り出しました)$ 1
- スーパーグルー(シアノアクリレート)$ 2.48
- 無毒の選択 接着剤90セント
- サンドペーパー
- 小さなワッシャー
ゴキブリ:
- マダガスカルのヒスノイズゴキブリ(⚠購入する前に、国と州の規制を確認してください⚠)
- 大型の水槽
- 小さな水槽
- バナナ、リンゴ、ドッグフード(毎日、濡れたペーパータオルでゴキブリに餌をやる)
- 卵パック(ゴキブリの隠れ場所として使用)
- 紙を切り取ります(テラリウムの寝具として使用します)
- ヒートパッド
ゴキブリに関するあなたの国と州の規制を確認してください。常にケージを閉じて、上部にワセリンの厚い層を付けてください。ゴキブリをテラリウムの外に放置しないでください。絶対にしないでください どこに住んでいてもゴキブリを自然に放ちます。
ツール:
- はんだごて
- ストレートピン
- ホットグルーガン
- はさみ
- カッターナイフ
- ライターまたはマッチ(ワイヤーが出た場合に瞬間接着剤を焼き払うため)
ステップ3:バックパックを作成する <図>
 <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図> 
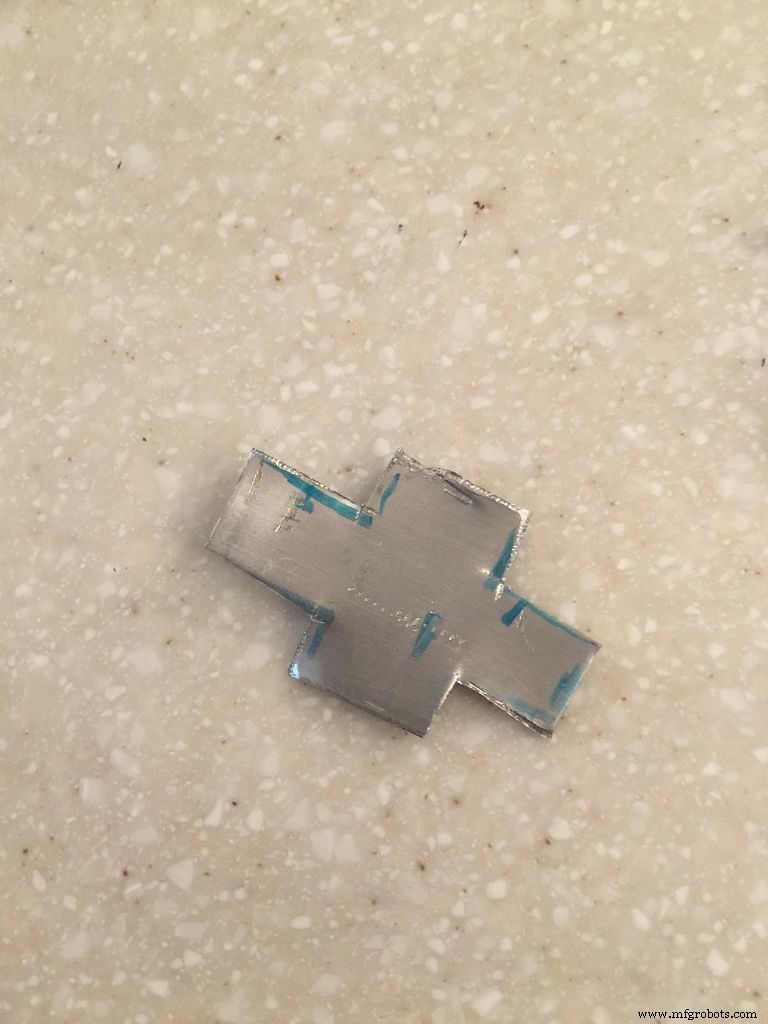
最初のステップは「バックパック」を作ることです。いくつかのシートアルミニウムを使用して、3インチx2インチの「+」形状を切り取ります。次に、端を上に曲げます(写真を参照)。それらが壊れた場合は、アルミニウムの粒子に対して切断してみてください。その後、一方の端に電気テープを巻き付けます。次に、一方の端に中央に向かって小さな穴を開け、ワイヤーを挿入します。次に、一方の端を小さなワッシャーにはんだ付けします。反対側にも同じことをします。それが終わったら、取り付けたばかりのワイヤにピンコネクタをはんだ付けし、はんだ接合部に電気テープを貼ります。次に、大きなピンコネクタを「バックパック」の側面の1つにホットグルーし、より線からピンの1つに約1インチの長さのワイヤをはんだ付けし、もう1つのピンでも同じようにします。また、テストする場合は、A23バッテリーをホルダーに入れ、ピンコネクタをArduinoMicroのVINピンとGNDピンに入れます。それが点灯した場合、あなたはそれを正しく行いました。そうでない場合は、バッテリーパックを曲げてA23バッテリーに接触させる必要があるかもしれません。
ステップ4:アンテナの手順 <図>
 <図>
<図>  <図>
<図> 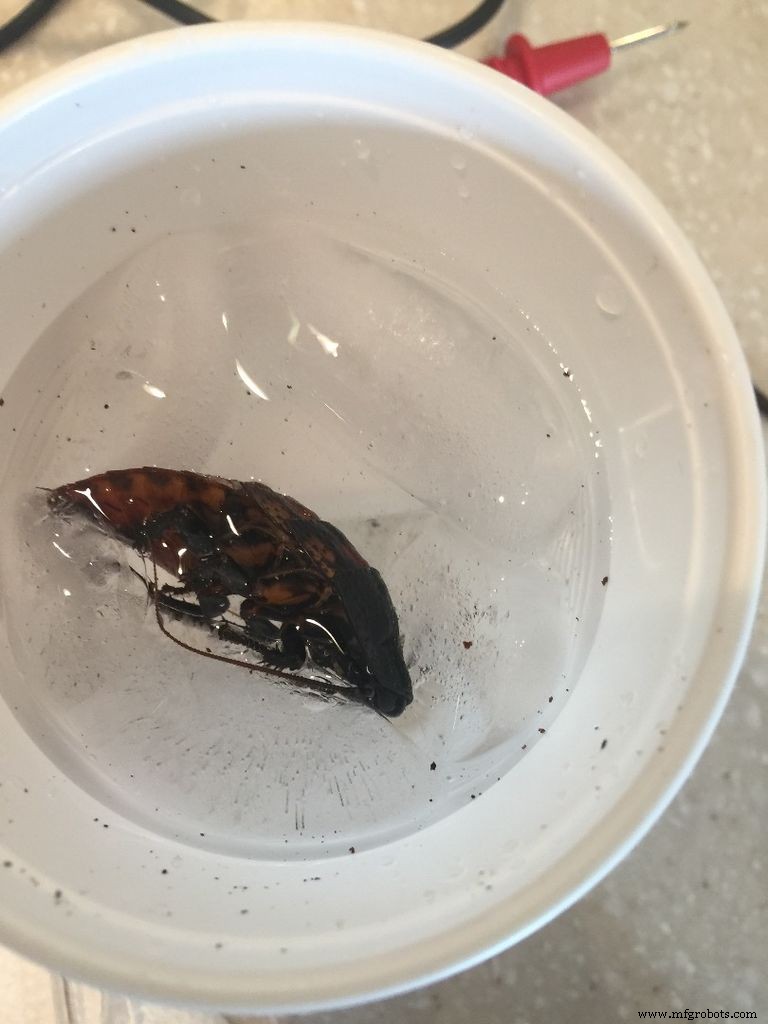 <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図> 
ゴキブリを取り、氷水(ゴキブリを麻酔します)に約2分間、または動きにほとんどまたはまったく反応がなくなるまで静かに入れます。その後、ペーパータオルの上にゴキブリを置き、ゴキブリの胸部(これは指の爪や髪の毛によく似た神経のない物質です)の上部を軽く研磨し、無毒の接着剤でバックパックを研磨した部分に接着します。次に、アンテナを約2〜3cmにトリミングします。その後、トリミングされたアンテナ(中空)の1つにワイヤーを約1/4 cm軽く挿入し、ワイヤーに瞬間接着剤を塗布して、アンテナにさらに1/4 cm押し込みます。これは、他のアンテナ。もうすぐです!続行する前に、ゴキブリがまだ完全に麻酔されていることを確認してください。そうでない場合は、ゴキブリを氷水にそっと戻します。ゴキブリの胸の側面にまっすぐなピンを慎重に挿入します。次に、先ほど作成した小さな穴にアース線を1/4 cm挿入し、ワイヤーに少量の瞬間接着剤を塗布して、さらに1/4を穴に挿入します。彼らはワイヤーを引き出すことができるので、ワイヤーが彼の足から離れていることを確認してください!終わったら、別のテラリウムで一晩回復させます。手術を数回行うと、簡単になります。また、お母さんを幸せに保つために、テーブルを掃除して氷水を処分することを忘れないでください。
ステップ5:コード <図>

コードはシンプルで簡単に変更できます。コードを書き直そうとする場合は、トーン関数を使用するたびに、noTone(ここではPIN番号)を使用することを忘れないでください。また、Arduinoはミリ秒を使用するため、1秒は1000ミリ秒に相当します。他のアンテナを刺激したい場合は、11を12に変更するだけです。
/ * void setup(){void loop(){tone(11、random(1,100)、random(1,1000)); //これによりゴキブリが一方向に回転しますnoTone(11)}
ステップ6:試してみてください! <図>

コードをArduinoにアップロードしたら、バックパックを持ったゴキブリをテラリウムから取り出し、A23バッテリーをバックパックに挿入し、ピンコネクタをArduinoに挿入して、ゴキブリが回転するのを観察します。適切に接地されていないと思われる場合は、電圧計を取り出してオームに設定してください。アンテナ線とアース線にリード線を付けます。1オームを超える値が表示された場合は正しく実行され、1未満の値が表示された場合は、アンテナ線とアース線が接触しています。範囲」は適切に接地されていないため、接地線の手順をやり直す必要があります。この実験が終わったら、バックパックをそっと取り外してワイヤーを切断することを忘れないでください。もう1つのヒントとして、テストするときは、ゴキブリが暗い場所で回転することがあるため、照明がほぼ同じ部屋で行うようにしてください。
家にゴキブリが生きていることに我慢してくれた母と、プロジェクトを手伝ってくれた父に特に感謝します。読んでくれてありがとう!
コード
- コードスニペット#1
コードスニペット#1 Arduino
/ * void setup(){void loop(){tone(11、random(1,100)、random(1,1000)); //これによりゴキブリが一方向に回転しますnoTone(11)} 製造プロセス