


ステップ1:コボットを運用に正常に実装する

今では誰もがコボットとは何かを知っていますが、多くの人は、コボットが準備ができているかどうか、または準備ができているかどうか、日常の生産プロセスにコボットを実装する方法を確信していません。誰もがしたい最後のことは1つにお金を使うことです、そしてそれが到着したら、それを横に移動するか、それがそこにあることを忘れるか、上司があなたに何をするのか尋ねるまで、それを木枠に詰めておきます誰も使っていないその金属の塊と関係があります。
おなじみですか?そこで、Absolute MachineToolsが登場します。A+ Automationチームは、実装プロセスを段階的に説明することで、このプロセスを確実に成功させるお手伝いをします。
OB7コボットの詳細については、ここをクリックしてくださいコボットを適切に正当化して実装する方法については、この一連の投稿に従ってください。参加する準備ができている場合は、お問い合わせください。実現を支援します。
ステップ1:コボットはアプリケーションの一部にすぎません
ワークスペースを最適化する
コボットは、完全自動化セルの1つのコンポーネントにすぎません。物理的なセットアップについては、作業領域のどこに配置するかを検討してください。従業員が以前立っていたスペースにコボットを巻き込むことはできますか、それとも最初に作業エリアを再設計する必要がありますか?
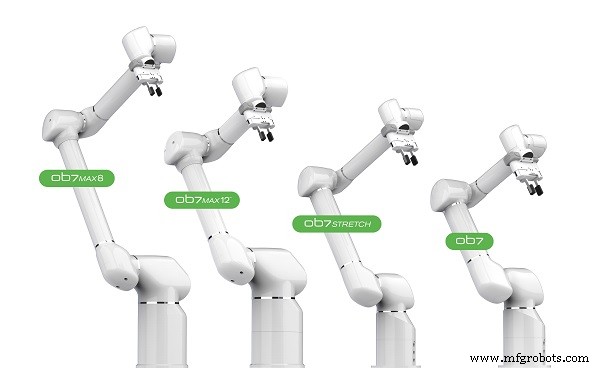
コボットが設置されると、従業員がそのエリアにアクセスするのを妨げますか?これは、作業領域が高い柔軟性と器用さを備えた人々のために設計されているため、一般的です。通常のロボットよりもはるかに優れています。一般的なコボット(および産業用ロボット)には6つの関節があり、人間の腕よりも操作性が大幅に低下します。一部のコボットは、7つの軸(またはジョイント)で利用できるようになりました。これにより、人間の腕と同様の操作性が得られます。一般に、軸が多いほど、柔軟性と汎用性が高くなります。
この投稿に示されているような7軸のコボットは、狭いスペースに収まり、エリアの周囲に到達し、作業エリアの横に配置できます。コボットと従業員の両方に合うようにワークスペースを再設計する必要のないモデルを探してください。ここで、Absolute MachineToolsのA + Automationが役立ちます。 A +自動化チームが入ってきて作業エリアにアクセスできるようにします。当社の自動化エンジニアは、評価された領域、コボットの位置、および材料が提示されて荷降ろしされる場所の位置を確認します。一緒になって、作業スペースに調整が必要かどうか、または現在の構成内で問題なく動作するかどうかを判断するのに役立ちます。
コボットを運用に実装する場合、コミュニケーションが重要です
コボットの実装方法に関する次の考慮事項は、ロボットとロボットが動作する機器との間の通信です。コボットがCNCまたは他のマシンの世話をする場合、そのマシンとどのようにインターフェースしますか?古いマシンにはインターフェース機能がないか、より複雑なインターフェースが必要な場合があります。
次の質問を検討してください:
- 社内のエンジニアは、そのインターフェイスを構成するための知識や専門知識を持っていますか?
- 機械と電気的に接続するよりも、従業員のようにコボットにスタートボタンを押してもらう方が簡単でしょうか?
- その場合、コボットはスタートボタンに到達できますか?
繰り返しになりますが、これはAbsoluteのA +自動化チームが支援できる場所です。いくつかの質問で、統合の範囲を判断し、CNC工作機械との統合とインターフェースを成功させるためにMコードや特殊ケーブルなどの他のコンポーネントが必要かどうかを判断できます。開始するには、今日info@absolutemachine.comまでメールでお問い合わせください。
コボットシリーズの実装の成功に関する以前の投稿を確認してください:
- ステップ1:コボットはアプリケーションの一部にすぎません
- ステップ2:このプロセスでインテグレーターはどのような役割を果たしますか?
- ステップ3:作業はどのようにステージングされますか?それはすべてマスタープランの一部である必要があります
- ステップ4:適切なエンドエフェクタを選択する
- ステップ5:ビジョン–そこに行くべきですか?
- ステップ6:コボットは産業用ロボットのようにメンテナンスが必要ですか?
- ステップ7:リスク評価
産業用ロボット