


カスタム多軸システムではなく 6 軸ロボット アームを選ぶ理由
直感に反するように思えるかもしれませんが、4 つの自由度のうち 3 つの自由度しか必要としないため、システムを設計する代わりに既製の 6 軸ロボット アームを使用する方が理にかなっている場合があります。既製の 6 軸ロボット アームを使用すると、カスタム システムと比較して、費用、時間、スペース、およびエネルギーを節約できます。
6 軸ロボット アームで設備投資を削減
多軸システムの設計には時間がかかり、エンジニアリング費用がかかります。多軸システムは、互いに積み重ねられた 2 つのリニア ガイド (いわゆるガントリー ロボット) のような単純なものから、数十のリンケージとユニバーサル ジョイントやボール ジョイントを備えた 6 軸のパラレル ロボットのような複雑なものまであります。しかし、最も単純なガントリー システムであっても、適切なリニア ガイドの選択、設計とマシン アダプター プレート、およびモーション コントローラーの実装が必要です。設計中のシステムを何百も使用する場合、設計コストは分散されますが、少数のシステムでは、たとえそれが過剰に思えても、既存の 6 軸ロボットを単純に使用する方が経済的に理にかなっていることがよくあります。目的のために設計されています。設計済みのシステムでは、同じ 6 軸モーション コンポーネントを使用して、設計コストを他の全員と分担します。

カスタムメイドのピックアンドプレース システムの例
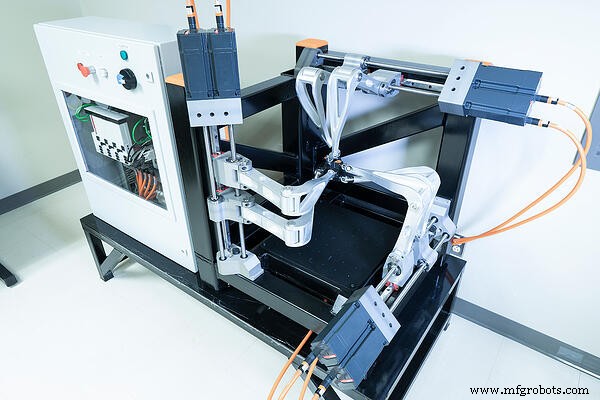
よりコンパクトで手頃な価格の Meca500 よりもパフォーマンスがはるかに劣るカスタムメイドの 6 軸並列ロボットの別の例
Meca500 を使用したより迅速な可用性と実装
カスタム多軸システムの設計にかかる時間に加えて、プロジェクト計画には、各コンポーネントを受け取るまでにかかる時間を含める必要があります。サプライ チェーンの問題により、モーターの納品を何ヶ月も待たなければならない場合があります。予期せぬ事態が発生すると、最終製品の配送がさらに遅れる可能性があります。 Meca500 のような標準の 6 軸ロボットでは、多くの場合、ロボット コンポーネントの在庫があり、すぐに使用できます。
実装中にさらに時間が節約されます。 Meca500 は任意のコンピュータまたは PLC とインターフェースできるため、好みのプログラミング言語を使用してロボットを簡単に操作できます。多くのカスタム設計されたシステムでは、習得に時間がかかる独自のプログラミングを使用する必要があります。
コンパクトな 6 軸ロボットによる設置面積の縮小とエネルギー消費の削減
カスタム設計されたロボットは、フットプリントを最小限に抑えるために設計を改良および修正するために余分な時間を費やさない限り、大きくてかさばる可能性があります。カスタム構築されたシステムには、大きなコントローラーと長くて太いケーブルも含まれる可能性がありますが、これはほとんどの 6 軸ロボットにも当てはまります。 Meca500 のような市販のコンパクトなコンポーネントを使用することで、このユニットは設置面積を最小限に抑えるように設計されています。 Meca500 コントローラが組み込まれているため、完全なシステムは非常にコンパクトで、スペースを節約できます。この製品にすでに組み込まれているすべての開発の恩恵を受けることができます。
小さなコンポーネントは場所を取らないだけでなく、大きなシステムよりも固定が容易で、必要なブラケットも少なくて済みます。 Meca500 のような小さなユニットはエネルギー効率も非常に高く、大きなロボットよりも消費電力が少なくなります。
6 軸ロボット アームでできることは?
Meca500 は精密作業に最適で、テストやキッティングなど幅広い用途にも使用できます。たとえば、この記事の冒頭の写真では、Meca500 を使用して 3 つの自由度だけで部品をピック アンド プレースしています。
Mecademic の製品とソリューションの詳細
当社の製品とソリューションが、精度やリーチを犠牲にすることなく、可能な限り最小のフットプリントで生産スループットを向上させる方法を知る準備はできていますか?
➡️ 当社の製品をご覧ください:https://www.mecademic.com/en/products
➡️ または、すぐに連絡してデモを予約してください!
産業用ロボット