


夢中にならずにロボットコンベアをプログラムする方法
ロボット コンベアのプログラミングは、多くの人が想像するよりも難しいものです。優れたシミュレーションは成功への鍵ですが、夢中にならずにそれを行うにはどうすればよいでしょうか?
コンベア ベルトは、製品をロボットに移動する簡単な方法ですよね?
ええと… そうではありません。コンベアは単純なソリューションのように思われがちですが、実際には、コンベアはより複雑なワーク搬送方法の 1 つです。コンベア上を移動する物体をロボットが検出して追跡する必要があります。これらは、ロボット プログラムを介して制御する必要があります。また、トラッキングの低下、ベルトの摩耗、スリップなど、生涯にわたってさまざまな機械的問題に悩まされています。これらすべては、コンベヤーがあなたを少し夢中にさせる可能性があることを意味します.
シンプルである代わりに、使い方が難しい場合があります。
コンベアの機械的な問題を解決することはできません。そのためには、Cisco-Eagle のこの便利なチェックリストに示されているような適切なメンテナンス スケジュールが必要です。ただし、できます コンベアを簡単にシミュレートして、コンベアをテストし、ロボットのプログラミングに統合できるようにします。
狂わずにロボット コンベアをプログラムする方法は次のとおりです。
ロボット コンベアの 5 つのトリッキーな可動部分
まず、コンベアのプログラミングが難しい理由を理解することが重要です。
ロボット プログラミングとコンベアの統合を難しくする 5 つの「可動部分」があります。
1.コンベア自体の制御
コンベア制御は単なる「オン/オフ」の取り決めのように見えるかもしれませんが、通常はそれよりも少し複雑です。コンベアには、モデルに応じてさまざまな制御オプションがあります。固定速度のものもあれば、可変速度で制御できるものもあります。リバース モード、アクティブ ブレーキング、または高速スイッチングを備えたものもあります。次に、さまざまな制御方法があります。最も一般的な 3 つは、パルス制御、速度制御、および分散制御です。

ロボット プログラム自体の内部でコンベアを制御する必要がある場合があります。そうでない場合は、ネットワークを介してコンベアと接続する必要がある場合があります。これらのオプションはどちらも、プログラミングの複雑さを増します。
2.オブジェクトの追跡と検出
移動するコンベアから対象物をピックアップするには、ロボットが対象物を確実に特定できなければなりません。これは、オブジェクトがロボットの前に到着したことを検出するために、ある種のセンサーが必要であることを意味します。さらに、ロボットは、コンベヤが移動するときにオブジェクトを追跡する何らかの方法が必要になる場合があります。
このための最も一般的なセンサーは、視覚センサー (2D または 3D カメラなど) と部品検出センサー (光線、磁気センサー、誘導センサーなど) です。他のものよりも簡単に統合できるものもありますが、それらはすべてプログラムをさらに複雑にします.
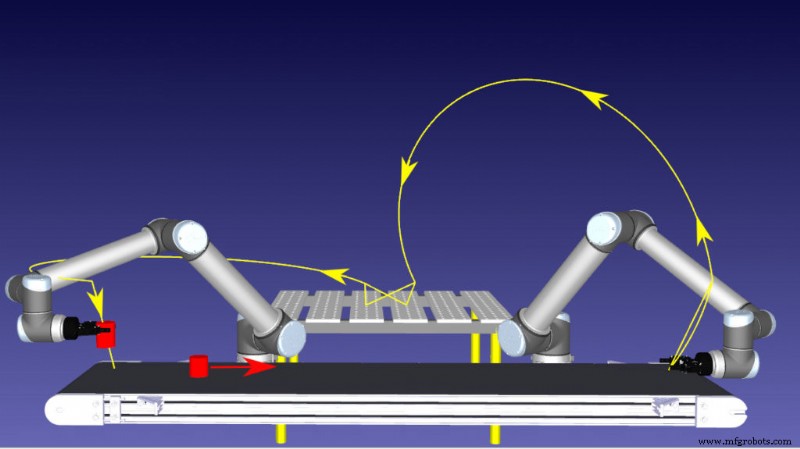
3.動く物体の取り扱い
動いているターゲットは、静止しているターゲットよりも常に扱いにくいものです。これにより、ベルトコンベアからつかむときに複雑さが生じます。ロボットは所定の位置に移動し、対象物をしっかりとつかみ、新しい対象物が次々と到着している間に離れていかなければなりません。
コンベアの速度はロボットの速度に正確に合わせなければなりません。 1950 年代のコメディ映画『アイ ラブ ルーシー』の有名な「チョコレート シーン」を見たことがあるなら、私の言いたいことがわかるでしょう (まだ見ていない場合はここにあります)。
4.エンドエフェクターの選択
システムの中で速度を維持する必要があるのは、ロボット アームだけではありません。エンド エフェクタは、サイクル タイム、つまりコンベヤの速度に大きな影響を与える可能性があります。ある種のエンド エフェクタは、他のものよりも高速です。
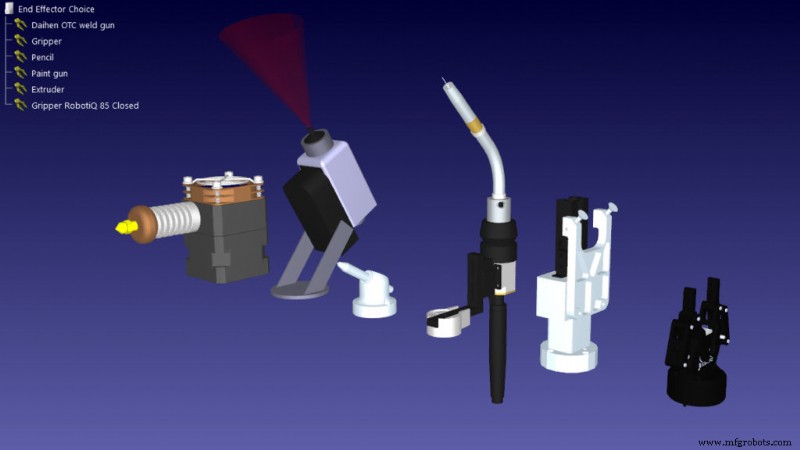
これは、3 つの独立した速度 (コンベア速度、ロボット アームの速度、およびエンド エフェクターの把持速度) を同時に制御および調整する必要があることを意味します。
5.備品の使用
最後の可動部分は、実際には可動部分ではありません。固定具は、オブジェクトを所定の位置に移動するためにコンベアに固定される静的な機械部品です。これらは、センサーを使用せずにコンベア上のオブジェクトを注文する信頼できる方法です。
たとえば、ビジョン センサーを使用する代わりにフィクスチャを使用できます。特別に形成された板金を使用すると、オブジェクトを静的キューに流し込むことができ、ロボットが追加のセンサーなしでオブジェクトを拾うことができます。プログラミングは簡単になりますが、機械設計の複雑さが増します。
RoboDK でコンベアをシミュレートする方法
上記の 5 つの課題は、物理システムを使用する前にロボット システムをシミュレートし、徹底的にテストすることで克服できます。これは、ロボット シミュレーターでは必ずしも簡単ではありません。ロボット シミュレーターの多くは、コンベアを追加するための単純な機能を備えていません。
ありがたいことに、RoboDK のコンベアは非常にシンプルです。必要な制御に応じて、それらを追加するための 2 つのオプションもあります。
RoboDK の 2 種類のコンベアは次のとおりです。
オプション 1:Python プログラミング
RoboDK でコンベアを作成する最も柔軟な方法は、Python でプログラミングすることです。これは、RoboDK を使用したコンベア シミュレーションのサンプル ビデオで実際に確認できます。
Python プログラミングの利点は次のとおりです。
<オール>Python プログラミングの欠点は次のとおりです。
<オール>オプション 2:リニア メカニズム
もう 1 つのオプションは、[モデル メカニズム] ウィザードを使用して線形メカニズムを作成することです。これにより、単一の直線軸を持つ単純なコンベアを作成できます。
リニア メカニズムの利点は次のとおりです。
<オール>線形メカニズムの欠点は次のとおりです。
<オール>始める方法
どのオプションを選択するかは、Python プログラミングを避けたいかどうかによって大きく異なります。線形メカニズムを選択する正当な理由がない限り、通常は python オプションを選択することをお勧めします。これははるかに柔軟で、(私はプログラマーですが) 理解しやすく、実装しやすいと思います。
どちらのオプションを選択しても、コンベア シミュレーションを最初から作成する必要はありません。
どちらのオプションも、ロボット ライブラリでダウンロードできます。 「タイプ」メニューから「オブジェクト」を選択するだけで、2 つのオプションが表示されます。python オプションの「モデル Python」。および線形メカニズム オプションの「モデル メカニズム」。
行き詰まった場合は、いつでも RoboDK フォーラムにコメントを投稿できます。私たちはあなたを助けるために最善を尽くします。
産業用ロボット