


ArduinoIoTロボットアーム
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 5 |
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
これは、次の機能を備えた私の最初のロボットアームです。
- 5DOFロボット、グリッパーを除外すると実際には4
- 脳はIoT機能を備えたArduinoYunです
- コントロールインターフェースはBlynkアプリに組み込まれています
- フォワードキネマティックは、RoboticsToolboxを使用してMatlabに実装されています
- スムーズな動きを実現する私が書いた新しいライブラリ
結果にとても満足しています。したがって、私の経験とその構築方法を皆さんと共有したいと思います。
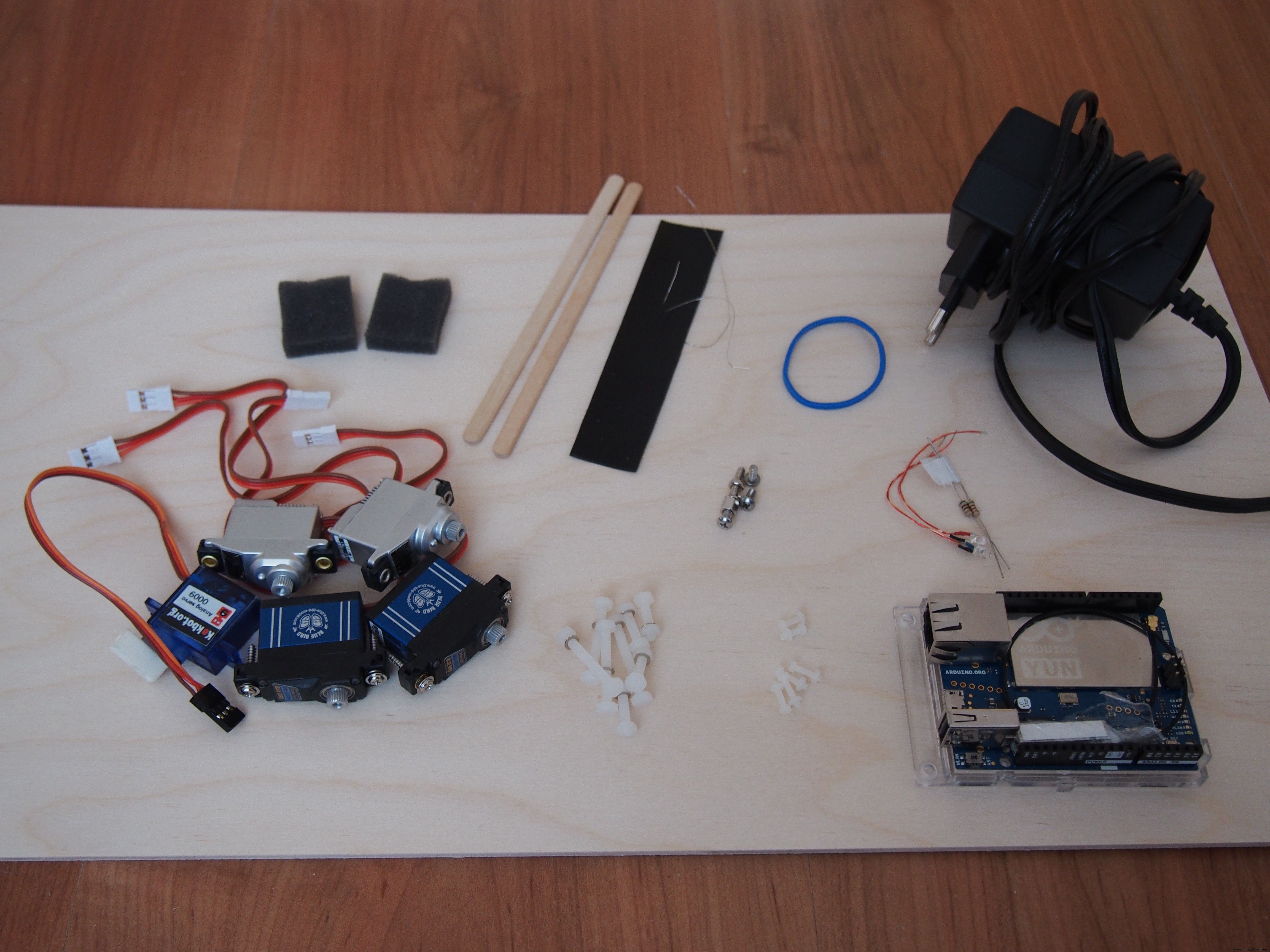
コンポーネントと材料
必要なロボットを構築するには:
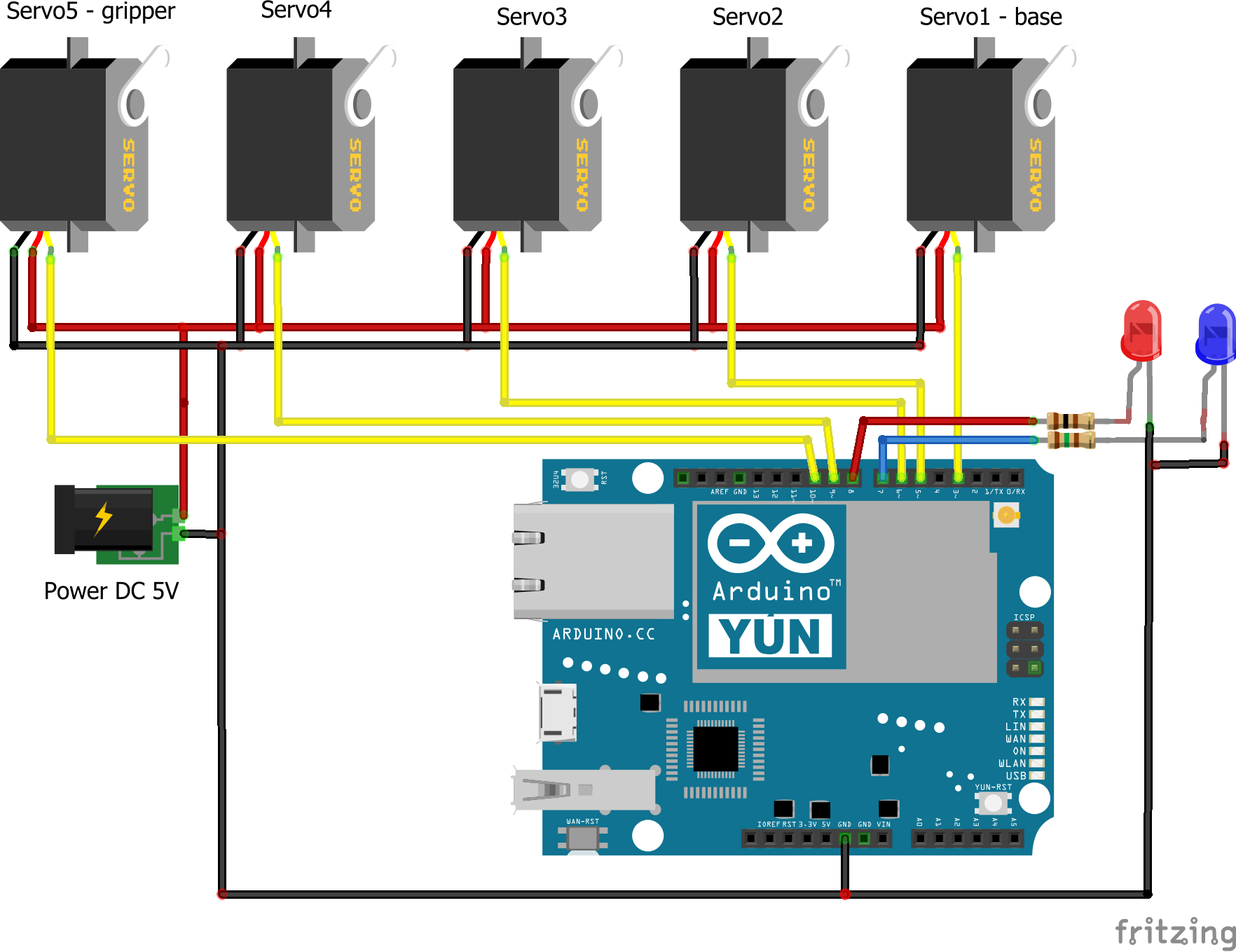
- 1 x Arduino Yun(または任意のArduinoボード)
- 5xサーボモーター
- 1 x 5V充電器、最小2.5 A
- 2 x Led
- 2 x抵抗、それぞれ100オーム(赤色LEDの場合)および150オーム(青色LEDの場合)
- 2xウッドミキシングスティック
- 1 x金属線(または同様のもの)
- 1 xプラスチックシート(シャワージェルボトルから取り出しました)
- 1x輪ゴム
- 2 x小さなスポンジ(左上隅を参照)
- 9xプラスチックM3ネジ
- 6xプラスチックM2.5ネジ
- 1 x木製プレート3mm(30cm x 50cmで十分です)
- 1x木質接着剤
- コーディングの時間
ロボットの構築
ロボットを組み立てるには、まずサーボのサイズを測定し、サーボのトルクを確認します。これにより、腕のサイズ、そして最終的にはロボットのサイズがわかります。私の場合、2つの異なるマイクロ高トルクサーボを注文しました:最初のペアと2番目のペア。これらは、120度の移動が指定されている場合でも、最大140度の移動が可能です。ただし、移動角度を大きくするために、180度のサーボを購入することをお勧めします。
グリッパーの場合、高トルクサーボは必要ありません。 eBayで最も安いマイクロサーボがその仕事をすることができます。
写真1のように腕を切ることから始めましょう。ここでは、創造性を発揮できます。固定されたデザインはなく、独自のデザインを思いつくことができます。次に、半分にカットされた1本のミキシングスティックとスプリングリターンとしてのプラスチックシートを使用してグリッパーを作成します。ワイヤーを内側に接続すると、グリッパーを開閉できます。私のロボットでは、1本のM3ネジを使用してグリッパーを回転させました。グリッパーの旋回は、重量バランスをとるためにアームの反対側に配置されたサーボによって行われます。電力は別のミキシングスティックを介して伝達されます(写真2、ロボットの上部を参照)。
次に、ベースサーボとArduino Yunボード(または別のボード)を保持するベースとプレートを作成します。すべてをまとめると、写真2のようなものになります。
より見栄えの良いデザインが必要な場合は、木製のコンポーネントを研磨し、好みの色でペイントします(写真3のように)。私のロボットでは、赤い縞模様のある銀色(金属を模倣するため)を選びました。最終結果を写真4に示します。
<図>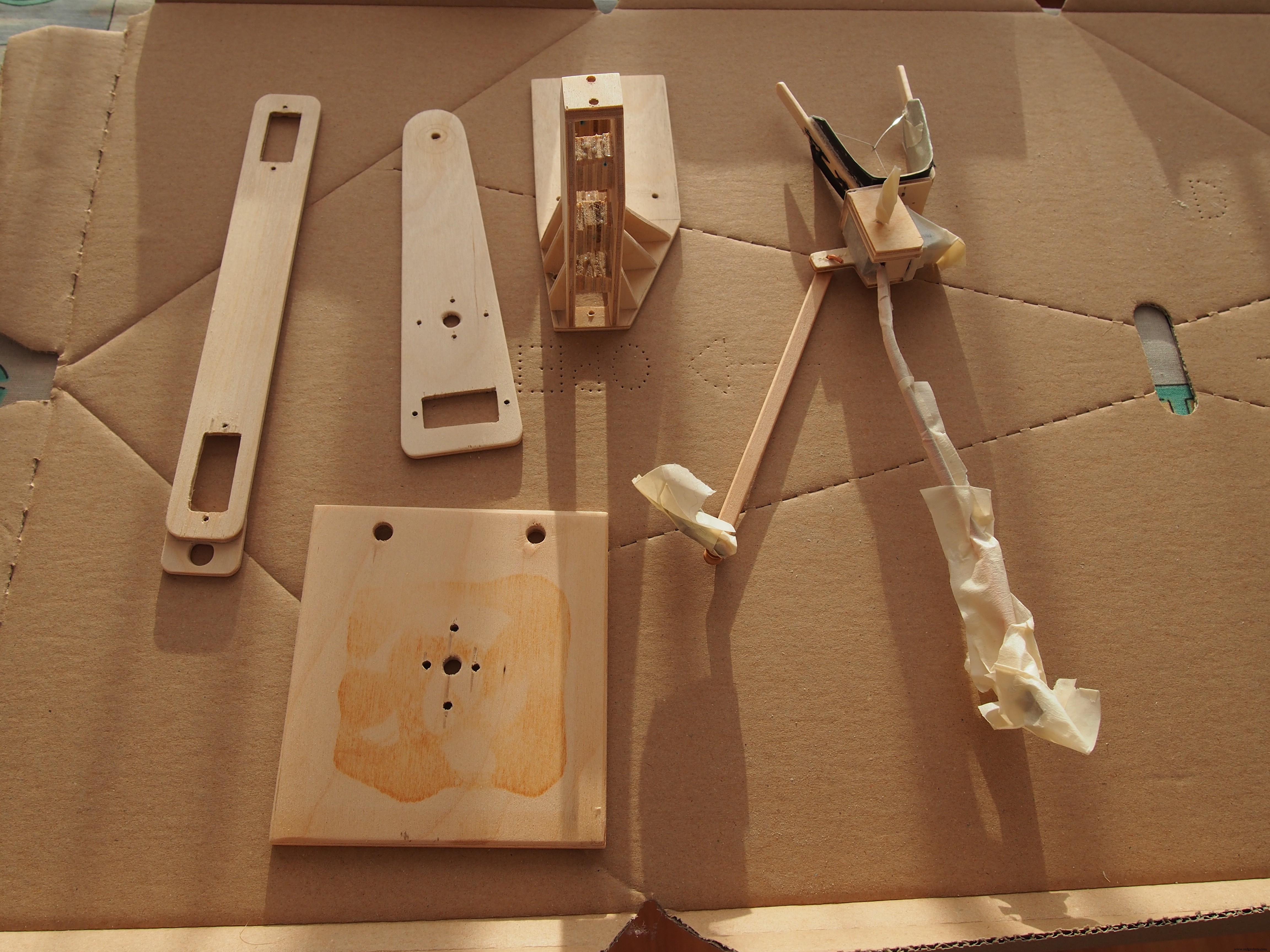 <図>
<図> 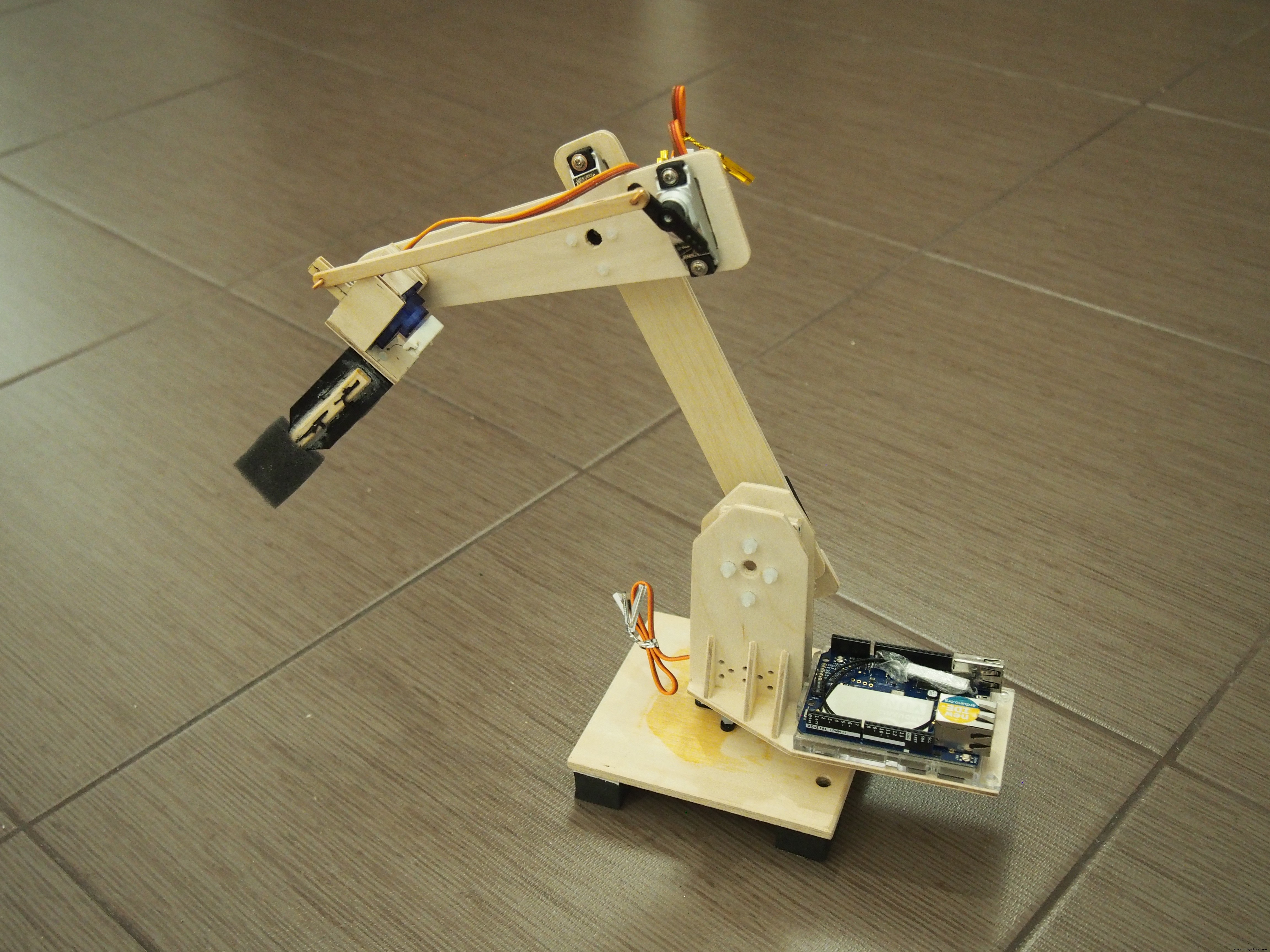 <図>
<図>  <図>
<図> 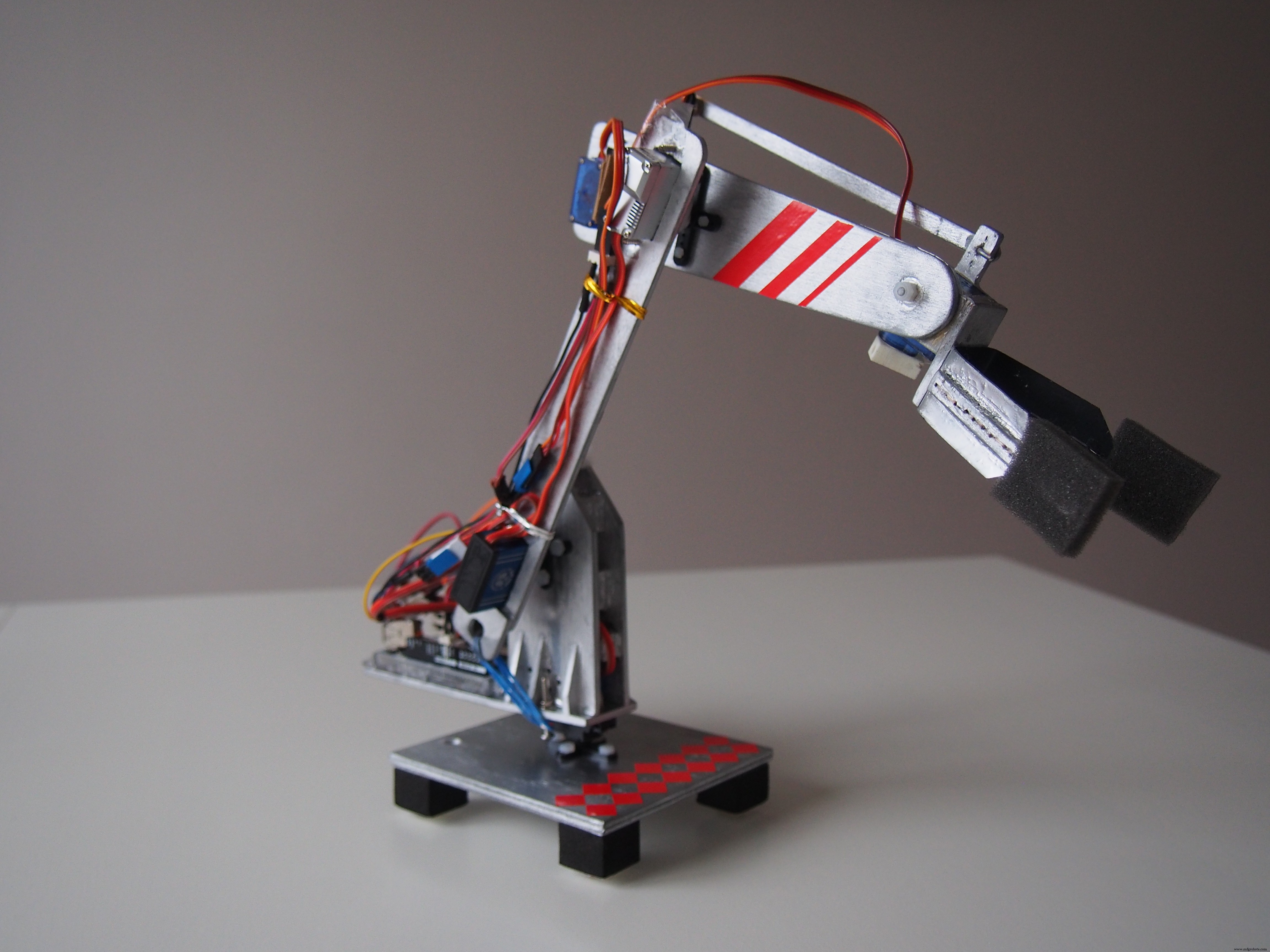
ソフトウェア
ソフトウェアについては、最初にBlynkでインターフェイスを作成することから始めました。これまでにBlynkを使用したことがない場合は、その使用方法についてWebサイトを確認してください。非常に簡単でわかりやすいものにする必要があります。
注: インターネットに接続できるボードがない場合でも、USBポートを介してArduinoUnoなどの通常のボードでBlynkを使用できることを心配しないでください。これを行うには、こちらをお読みください。
次に、ArduinoIDEに移動してコードを記述しましょう。あなたの便宜のために、私はコードを添付したので、あなたはそれを使うことができます:)それを実行するには、次のことをする必要があります:
- ArduinoYunボードを構成します。
- Arduino IDEにBlynkライブラリをインストールするには、[スケッチ]> [ライブラリを含める]> [ライブラリの管理]に移動し、Blynkを検索してインストールします。
- SimpleTimerという名前のフォルダーにあるSimpleTimerライブラリをArduinoライブラリフォルダー(通常はArduino \ libraries \ )に追加します。
- 私が書いたMotionGeneratorライブラリを、MotionGeneratorという名前のフォルダにArduinoライブラリフォルダに追加します
- RobotArm_instructables.inoをコンパイルしてアップロードします(注:Blynkトークンを更新することを忘れないでください)
注: MotionGeneratorライブラリは、あるポイントから別のポイントへのスムーズな移行を可能にする分析ベースのソリューションです。最高速度と加速を制限できます。
<図>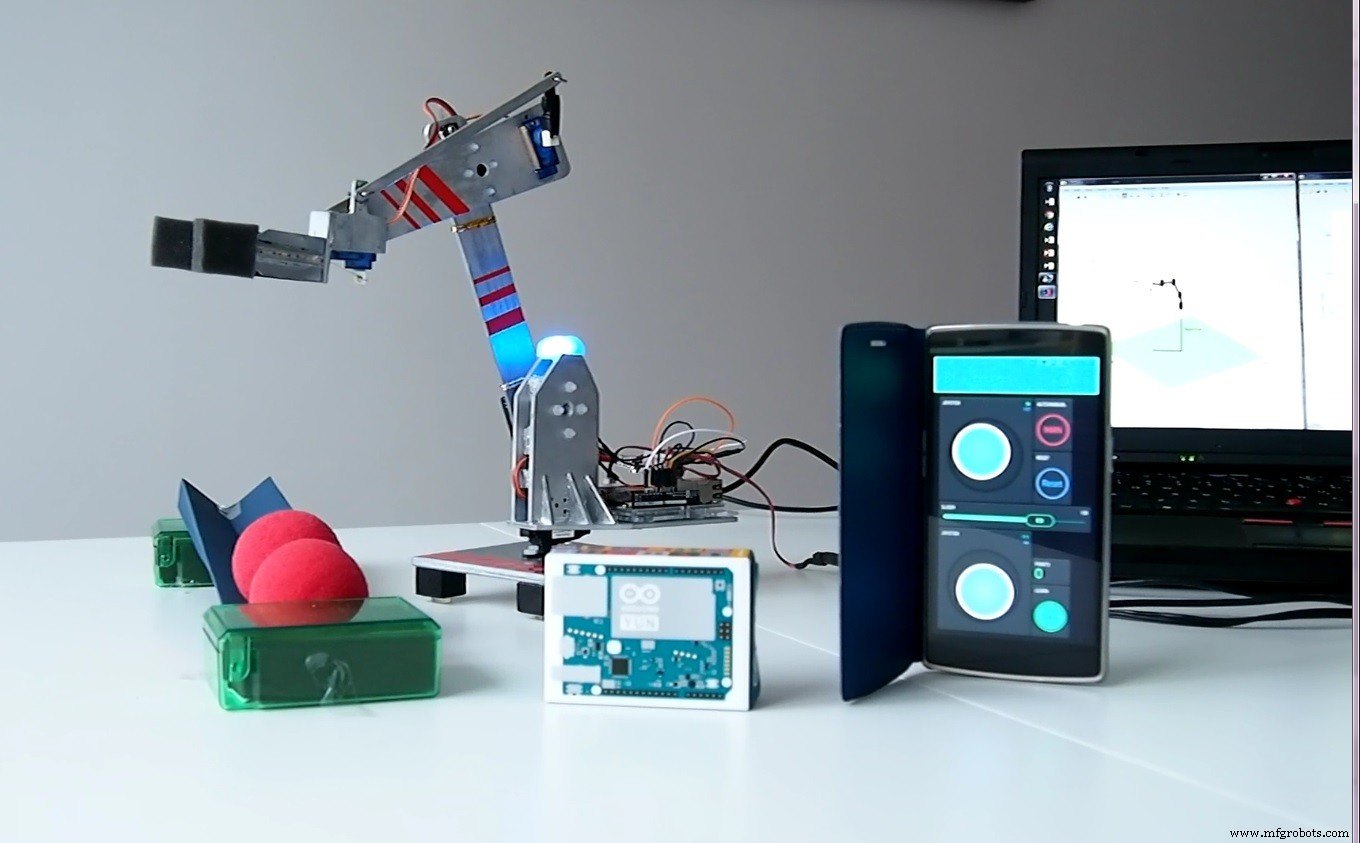 <図>
<図>  <図>
<図> 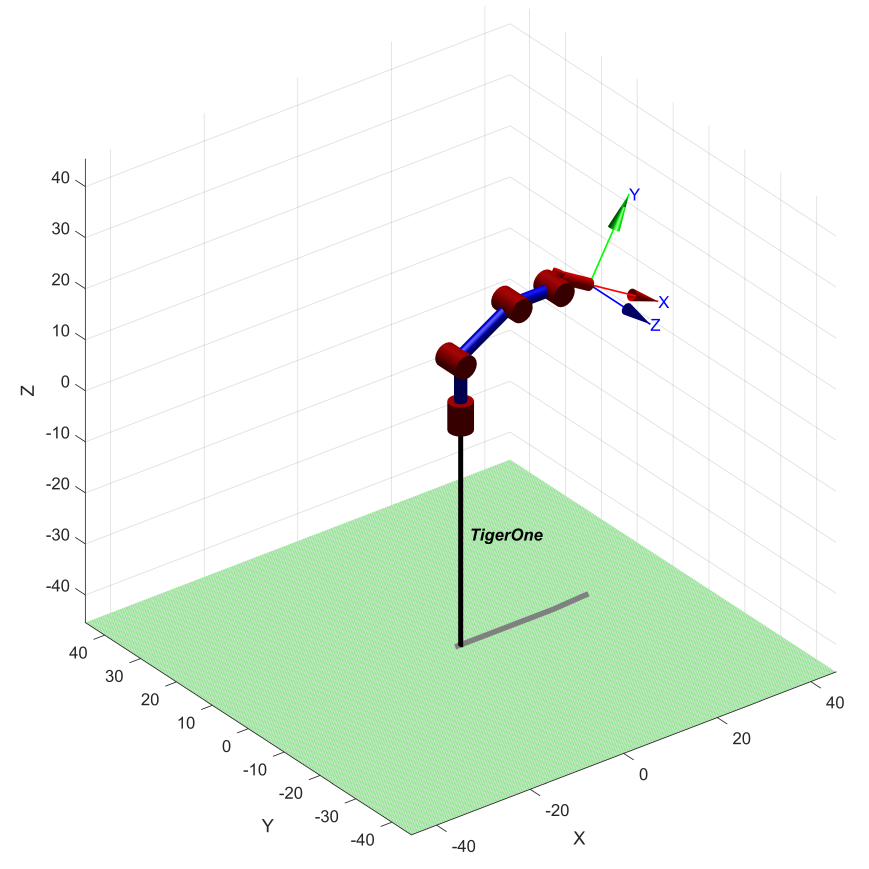
オプション(順運動学、上の写真3を参照): このためには、MatlabとRoboticsToolboxが必要です。これらすべてを設定した場合は、ロボットがBlynkに接続され、コンピューターのUSBポートに接続されていることを確認してください。 Matlabは、シリアル通信を介してArduinoから情報を収集します。したがって、MainScrip.mに正しいCOMポートを入力してください。最後に、MainScrip.mを実行するだけです。
注:ロボットの運動学は私自身のロボット用です。ロボットの寸法は異なる場合があります(robotKinematicsFcn.mで自由に調整してください)。
コード
- ソースファイル
ソースファイル C / C ++
ソースコードファイルを含むZipアーカイブ。プレビューなし(ダウンロードのみ)。
回路図
製造プロセス