


ロボット部品バリ取りへの移行
製造されるコンポーネントのサイズに関係なく、穴あけや切断によって発生する粗いエッジ (バリ) を除去して、機械加工された部品を「すぐに組み立てられる」ようにすることが重要です。すべてではないにしても、ほとんどのメーカーは表面仕上げの重要性を理解していますが、製品の品質とスループットを向上させるために、生産ラインにロボットによるバリ取りなどの最適化されたプロセスをまだ実装していないメーカーがあります。
手動プロセスから自動化プロセスへの移行についてまだ「準備中」の企業、またはロボットによるバリ取りへの変更を検討しているメーカーは、次の点に注意してください。
多くのメリットが得られます
高速で有能で正確なロボットは、バリ取りなどの単調で危険な作業に優れており、いくつかの魅力的な利点があります。-
高品質 – 高精度で再現性の高いロボットは、製品の品質を向上させるために、より高い精度を提供します。これは、ほんの数分の 1 インチのバリでもコストがかかる可能性がある安全上重要な部品 (ジェット エンジン コンポーネントなど) にとって非常に重要です。適切なプロセスを開発することで、ロボットによってバリ取りされた部品は、部品ごとに、また毎日、一貫したものになります。ロボット プログラミングのコンプライアンスにより、これが容易になり、厳しい公差と非常に一貫した仕上げが可能になります。
-
スループットの向上 – 人間の労働者が経験する疲労なしに 24 時間 365 日最高速度で実行できるロボットは、より速いペースでエンドレスに作業して生産工程を完了することができます。
-
最適化された工具管理 – バリ取りでは、工具の摩耗が少し問題になります。プロセスを自動化することで、ロボット コントローラーはツールの寿命を監視し、ビーコンの視覚的または可聴信号を利用して、ツールの交換時期であることをオペレーターに警告できます。
-
投資収益率の向上 – 通常、ロボットは人間と同じ時間でより多くの部品を作成できるため、ロボットのライフサイクル全体で投資回収期間が短縮され、投資収益率 (ROI) が向上します。
-
安全性の向上 – 前述のように、バリ取りは退屈な作業であり、作業者の安全を損なう可能性があります。反復動作による労働災害は一般的です。さらに、機械の騒音による聴覚障害や、金属スプレーによる眼の損傷の可能性もあります。二次仕上げプロセスを自動化することで、企業は労働者を保護し、場合によっては保険料を引き下げることができます。
利用可能なさまざまなシステム オプション
従来、ロボットによるバリ取りは次の 2 つの方法のいずれかで行われます。1) パーツからプロセスへ – ロボットがパーツをグラインダー ルーター ツールまたはサンダーに運ぶか、または 2) プロセスからパーツへ – ロボットがプロセス ツールを操作して固定パーツに移動します。これを念頭に置いて、ジョブに最適なシステムを選択するための他の考慮事項を検討する必要があります:
ワークの特徴
材料の種類 (鋼、チタン、アルミニウムなど) や部品のサイズ (厚さ、幅、長さなど) から、コーティングの必要性 (クラッディングや塗装など) まで、考慮すべき部品の属性やプロセス要件は数多くあります。マシンの構成と研磨剤の種類をガイドするのに役立ちます。
- 研磨タイプ – 各ショップは、各部品の設計、製造、および検査要件の概要を示す詳細な生産計画を持っている必要があります。具体的には、パーツ エッジの望ましい状態と外観を指定する必要があります。これは、システムと研磨ツールのタイプを決定するのにも役立ちます。ベルトやブラシからディスクなど、複数の標準ツールを使用できます。ベルトはさまざまなサイズの部品の垂直バリ取りに優れていますが、ディスクやブラシは小さなワークのバリ取りに適しています。カスタム研削ツールも作成できます。
-
複数のタスク – 場合によっては、システムが複数のタスク (つまり、切断とバリ取り、研磨と研磨など) を完了できる必要があります。したがって、複数のスピンドルまたはツールを変更できるスピンドルが使用されます。
-
潤滑剤 – 使用する金属の種類に応じて、湿式または乾式の研磨プロセスが実装されます。炭素鋼に最適な乾式研削システムは、通常、より手頃な価格で、メンテナンスの必要が少なくなります。アルミニウムやその他の異種金属に頻繁に使用される湿式研削システムは、切削液 (ゲル、ペースト、エアロゾルなどの形の冷却剤) を噴霧して、摩擦、熱、および可燃性の高い粉塵粒子を低減します。
-
工場のワークフロー – 工場のワークフローを適切に処理することは、ジョブに最適なロボットまたはシステムを決定するのに役立ちます。いつものように、新しい機器が既存の自動化にどのように適合するかを戦略的にマッピングし、現在の運用を強化し、製造現場の交通渋滞を回避するような方法で実装することが重要です.
テクノロジーのブレークスルーが扉を開く
ロボットによるバリ取りシステムの実装は、初期資本コストが高く、システムの柔軟性が制限されていたため、これまで少量の部品を使用した中規模から大量生産に限定されていましたが、ロボット メーカーやソフトウェアとして、スマートで適応性の高いロボット技術が出現しています。開発者は、最新のテクノロジを反映するためにプラットフォームを常にアップグレードしています。
より手頃な価格のロボットと直感的なプログラミング オプションにより、小規模な製造業者 (手作業によるバリ取りのみを行っていた) は、トリミング、バリ取り、レーザー切断などのマルチポイント アプリケーションのロボットによる自動化を再検討するようになっています。
生産ニーズに対応する堅牢なテクノロジー
部品ソリューションへのプロセス

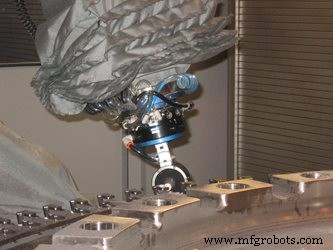
 写真:ACT Robots
写真:ACT Robots ストレートバリ取りまたはハイブリッドバリ取り/研磨プロセスが必要かどうかにかかわらず、ACT Robots (コネチカット州ブリストル) のような企業は、小型部品と大型部品のバリ取りを専門としており、多様なニーズに対応する複数のオプションを提供しています。具体的には、ACT はオープンおよびクローズド ループのバリ取りまたは表面仕上げプロセス ソリューションを提供します。
「顧客部品への表面仕上げプロセスの適用を成功させるには、ロボット システム統合の知識が必要になるだけでなく、表面仕上げ、複数のプロセス パラメータの正確な制御、オープンまたはクローズド ループ プロセスでの部品計測またはスキャン技術に関する豊富な経験も必要です。 ACT Robots のエンジニアリング担当バイス プレジデントである Mark Zamaria は次のように述べています。 「顧客部品のテストとプロセス開発の能力も非常に重要です。」
オープン ループ プロセスでは、ロボットの再現性 (プロセス パラメータ制御と研磨媒体の摩耗管理を組み合わせたもの) により、同じ入荷条件の部品に対して一貫した出力が提供されます。クローズド ループ プロセスには、エッジ プロファイル スキャナー、レーザー センサー、プロフィロメーター、渦電流プローブなどのパーツ スキャンまたは測定システムが組み込まれており、結果を確認し、プロセス パラメーターを再計算して、パーツの不規則な状態を補正します。
プロセス ソリューションの一部

Ellison Technologies (カリフォルニア州ロサンゼルス) は、マシン ショップが「バリを残さない」ことを支援することに専念しており、RoboBurr を作成しました。RoboBurr は、バリを除去するように設計された無駄のないターンキー ロボット ソリューションです。彼らの最大限の可能性。さらに、「RoboBurr は、顧客がプロセス、スループット、安全性、および OEE を改善するのを支援するという考え方で設計されています」と、Ellison Technologies の社長である Jeff Lage は述べています。 「繰り返しの動作と目の怪我は、今日でも機械加工で毎年発生する怪我の中で最も多いものの 1 つです。RoboBurr は、生産性を向上させながらこれらの問題を解消します。」
私たちの専門家があなたのためにここにいます
資本購入と同様に、バリ取りには考慮すべき多くの側面があります。当社の経験豊富なスペシャリストとエンジニアのチームが、特定の生産および財務目標を満たす、最も費用対効果が高く機敏なソリューションの選択を支援します。
産業用ロボット