


イムノクロマトグラフィーの検出と定量化のためのプラズモンサーマルセンシングベースのポータブルデバイス
要約
ポイントオブケア検査(POCT)は、病気の早期診断とモニタリングに広く使用されています。イムノクロマトグラフィー(LFA)は、POCTの商用ツールとして成功を収めています。ただし、LFAは、定量化と分析感度の欠如に悩まされることがよくあります。これらの欠点を解決するために、我々は以前に、携帯機器への熱コントラストのためにプラズモン金ナノ粒子を使用する熱LFAを開発しました。この方法論は、従来の視覚的検出と比較して分析感度を大幅に向上させますが、定量化の問題は依然として残っています。この研究では、LFAの定量化を可能にする伝導および放射熱検知モードを使用して、デバイスの動作条件を最適化しました。ナノ粒子のみを含むストリップの検出限界は、従来の視覚的検出と比較して、5倍(伝導モード)および12倍(放射線モード)減少しました。周囲温度の影響を両方の検出方法で調べたところ、放射モードは伝導モードよりも周囲温度の影響を受けやすいことがわかりました。熱感知法を検証するために、ヒト絨毛性ゴナドトロピン(HCG)バイオマーカーをLFAストリップを使用して定量し、放射線検出法を使用した場合に2.8 mIU / mLの検出限界を取得しました。
はじめに
病気のスクリーニングと治療には、早期発見と迅速な診断が重要です。ほとんどの医療検査は時間がかかり、臨床サンプル、大型機器、および十分に訓練された検査室の専門家の複雑な準備が必要です[1]。これらの要件は、資源が限られた地域での治療を大きく妨げています。ポイントオブケア検査(POCT)は、シンプルな機器を利用し、臨床的に適切な結果を得るのに必要な時間を最小限に抑え、臨床医と患者が迅速に意思決定できるようにします。 POCTには、短い検出時間、迅速なサンプル処理、簡単な機器、低い操作要件など、いくつかの明らかな利点があります[2、3]。したがって、POCTの出現は、特に資源が限られた地域での病気の早期かつ迅速な診断に役立ち、それによって病状を改善することができます。ただし、分析感度が低く、操作手順が複雑で、機器のコストが高いため、通常、この手法の適用が妨げられます。したがって、欠点を最小限に抑えながら、理想的な特性のほとんどを備えたPOCTアプリケーションを見つけるには、さらなる作業が緊急に必要です。
これらの問題のいくつかを解決するために、横方向フローアッセイ(LFA)はPOCTのテストツールとして非常に良い候補です。 LFAは、紙ベースのポイントオブケアストリップバイオセンサーであり、特定のサンプル中の標的分析物を特定するために使用されます[4、5]。 LFAは、サンプルパッド、コンジュゲートパッド、吸収パッド、および検出が行われるニトロセルロースメンブレンで構成される紙ベースのストリップ(スキーム1b)で実行されます。 LFAの利点の中で、その迅速性とシングルステップアッセイ、費用効果、簡単な操作、少量のサンプル量、およびさまざまな環境条件下での長い貯蔵寿命について言及する価値があります[6、7]。従来のLFAは、肉眼でテストラインの色の変化を検査することで「はいまたはいいえ」の結果を提供します。これは、これらの種類のアッセイで最も一般的な検出方法です。したがって、このタイプのアプローチは、正確性と主観的な判断の欠如に悩まされる傾向があります[8]。それにもかかわらず、LFAを電子デバイスと統合するのは簡単であるため、実行可能な検出アプローチは、正確な定量結果を得るためにストリップリーダーを開発することです。電荷結合デバイス(CCD)または相補型金属酸化膜半導体(CMOS)センサーは、通常、ストリップリーダーで画像をキャプチャするために適用されます。定量的な結果を得るには、画像処理ソフトウェアがよく採用されます。これらの光学リーダーでは、外部光源からの光の反射、透過、または散乱から得られた光学情報が記録され、定量化が可能になります[9、10、11、12]。測色リーダーでは、グレー値やRGB座標などの色の強度が、LFAストリップを分析するためにテストラインとコントロールラインから収集されます[13、14、15、16、17]。このアプローチの欠点の1つは、光損傷、機械的手段、またはその他の劣化プロセスによって染料が時間の経過とともに色を失い、再現性と精度が低下する可能性があることです。蛍光リーダーに頼るシステムでは[18、19]、有機フルオロフォアは特定の励起波長にさらされ、より長い波長でストリップに存在するフルオロフォアの発光を誘導します。次に、この放出された光を収集して、定量的な検出を行います。無視できない問題は、これらのアプリケーションで通常使用される有機フルオロフォアが光退色と化学的劣化に悩まされ、時間の経過とともに信号が減衰し、特定の取り扱いと特別な保管が必要になることです[7]。
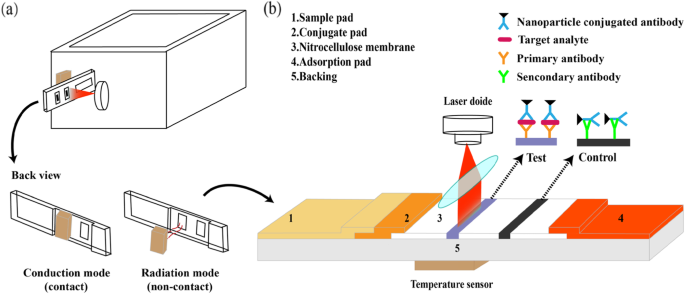
プラズモン熱センシングの概念。 a 2つの異なるセンシングモード(下)を備えたポータブルデバイスと主要コンポーネント(上)のモデル。 b 熱検知設定でのLFA
最近では、LFA検出にサーマルセンシングが徐々に適用されています。熱感知は、分析物の存在下で発生する熱が増加する熱変換器の使用から成り、前記変換器によるこの熱信号の検出を可能にする。ポロ等。 [20]は、異方性金ナノ粒子のプラズモニック特性を使用して発熱を誘発するために、近赤外(NIR)光源を使用して癌バイオマーカー癌胎児性抗原(CEA)を検出することにより、プラズモニック加熱によって駆動されるセンシングの概念を調査しました。秦ら。 [21]は、光源として緑色レーザーを使用してLFAを定量化するために熱コントラストを使用する方法を提案しました。これにより、分析感度が32倍向上しました。 2016年に、同様の熱コントラストリーダー[22]がWangによって開発され、LFA定量における8倍の分析感度が向上しました。トランスデューサーによる発熱を誘発するために使用される光源は、特定の波長に調整して、それらの波長で吸収しない他の分子の存在による影響を防ぎ、検出の特異性を確保することができます。電磁スペクトルのNIR領域にある光源を使用すると、生物学的起源の分子、特に血液の大部分による光の吸収を防ぐことができます[23]。これらの利点は、NIR光源を使用したプラズモン熱センシングが有望なLFA検出方法であることを示しています。ただし、以前の研究では、LFAストリップとNIR光源を組み合わせたPOCTデバイスは開発されていませんでした。
ここでは、ストリップを余分に変更することなく、LFAの分析感度を向上させるプラズモンサーマルセンシングベースのポータブルデバイス(スキーム1a)を開発しました。信号は、NIRレーザー照射時にプラズモン共鳴を完全に発揮させることによって増幅されました。プロトタイプのレーザー波長は、ナノ粒子の局在表面プラズモン共鳴(LSPR)ピーク内にあり(この設定では光から熱へのトランスデューサーとして機能します)、テストラインで熱を発生させます。次に、デバイスに配置された熱センサーによって発熱が検出されます。このセンサーは、赤外線放射(放射)または熱伝導のいずれかによって発生した熱を測定します。発生する熱量は、テストライン内のナノ粒子の数と照射力に比例します[24]。追加の操作は必要ありません。
熱伝達には、伝導、対流、および輻射の3つの主要な形式があります。さまざまな熱伝達形態の検出性能を研究するために、2種類のセンサー(スキーム1aおよび追加ファイル1:図S1)によって伝導モード(接触)と放射モード(非接触)をテストしました。プロトタイプ全体がコンパクトで、組み込みシステム技術と表面実装コンポーネントを使用しています。動作条件を最適化するために、検出能力に影響を与える主な要因を調査しました。ポータブルデバイスの検出能力を検証するために、膜にナノ粒子を直接ロードしたLFAストリップを定量化し、従来の視覚的検出と比較しました。私たちの検出方法は温度に依存するため、熱信号検出に対する周囲温度の影響も調べ、伝導モードの検量線を取得しました。最後に、ヒト絨毛性ゴナドトロピン(HCG)バイオマーカーをモデルとして定量化し、熱感知の検出能力を検証しました。
材料と方法
材料と試薬
リン酸緩衝生理食塩水(PBS)はLonza®から購入しました。 N-(3-ジメチルアミノプロピル)-N-エチルカルボジイミド塩酸塩(EDC)およびヘテロ二官能性ポリエチレングリコール(HS-PEG-COOH、MW =5000 g / mol(5 kDa))はSIGMA®から購入しました。 Tween 20、Triton X100、ウシ血清アルブミン(BSA)、トレハロース、ポリビニルピロリドン(PVP)、 N -ヒドロキシスルホスクシンイミド(S-NHS)、水酸化ナトリウム、塩化ナトリウム、塩化金(III)水和物、およびHCGホルモンはAladdin®から購入しました。ショ糖、四ホウ酸ナトリウム十水和物、ホウ酸、ヨウ化カリウム、およびチオ硫酸ナトリウム五水和物は、Sinopharm Chemical Reagent Co.、Ltdから購入しました。ボロハイドライドナトリウムは、Shanghai Lingfeng Chemical Reagent Co.、Ltdから購入しました。 -マウス二次抗体、ニトロセルロースメンブレン(NC-a110)、サンプルパッド(ガラス繊維BX108)、コンジュゲーションパッド(ガラス繊維BX101)、および塩化ポリビニル(PVC)表面は、JieyYiBiotech™から購入しました。 4-モルホリンエタンスルホン酸(MES)はShanghaiMajorbioから購入しました。純エタノールは常熟陽源化学株式会社から購入しました。
ナノ粒子の合成(ゴールドナノプリズム、AuNPrs)
この研究で使用されたナノ粒子は、以前に報告されたプロトコル[25]のバリエーションを使用して取得され、後で改善されました[26]。簡単に説明すると、220mLの0.5mM Na 2 の容量 S 2 O 3 20μLの0.1MKIを補充しました。次に、上記の溶液110mLを2mM HAuCl 4 を含む溶液に徐々に加えた。 30秒間にわたって、室温で合計4分間インキュベートし、その瞬間に溶液に残りのNa 2 を110mL補充しました。 S 2 O 3 + KI溶液を30秒間かけて、さらに4分間インキュベートします。最後に、100mLのNa 2 S 2 O 3 得られた溶液にKIなしで添加し、室温で60分間インキュベートして、最終的なプリズム形状のナノ粒子を得ました。前述のすべてのインキュベーションステップは、振とうせずに実行されました。合成後、ナノ粒子はPEG(PEG化)で安定化されました。ナノ粒子に添加されるPEGの量は、合成に使用された金の総重量の1:2の比率(NPとPEG)で調製されました。 PEGを1mLのMilli-Q水で希釈し、NaBH 4 の量を測定しました。 次に、PEGとNaBH 4 のモル比が1:1になるように添加しました。 。 PEGからNaBH 4 への全量 溶液をAuNPrsに完全に加え、穏やかに混合しながら2 MNaOHでpH12に調整しました。最後に、溶液を60°Cで60分間超音波処理した後、室温で4400 Gで15分間遠心分離して、AuNPrを過剰なPEGおよび未反応物質から分離しました。ペレットをMilli-Q水に再懸濁し、室温で4400Gで9分間3回遠心分離しました。これらの最終サンプルを元の容量の4分の1に希釈して、室温で数週間デカントできるようにしました。この後、溶液の上層(より小さく、より軽いナノメートルの金の副産物の大部分を含む)を、底に沈殿するAuNPrから取り除くことができます。ナノ粒子の濃度は、UV-Vis分光法によって400 nmでの吸光度(OD)を測定し、11.3 mL mg -1 の変換係数(ε)を適用することによって得られました。 cm -1 。この値は、ICPによって得られた金濃度を、合成の最終生成物のUV-Visによる400nmでのODと相関させることによって実験的に得られました。
ナノ粒子と抗HCG抗体の結合
簡単に説明すると、0.5 mg / mLのPEG化ナノ粒子を含む3mLの溶液を、室温のミニスピンマイクロフュージで6000rpmで9分間遠心分離することにより、0.1 mMESバッファーpH5.5で3回洗浄しました。最終的に洗浄したナノ粒子を同じバッファー(0.1MのMESバッファーpH5.5)の最終容量1 mLに再懸濁し、4mgのEDCとS-NHSを溶液に添加しました。次に、サンプルを穏やかに混合しながら20分間インキュベートし、6000 rpmで9分間遠心分離し、MESバッファーで洗浄しました。次に、20μLの抗体ストック(200μg)をサンプルに添加し、37°Cで3時間インキュベートした後、4°Cで一晩(振とうせずに)2回目のインキュベーションを行いました。翌日、コンジュゲートしたナノ粒子を遠心分離し(6000 rpmで9分)、ホウ酸緩衝液5 mM pH 9で2回洗浄しました。次に、25mgのBSAを溶液に添加しました。穏やかに振とうしながら室温で1時間インキュベートした後、サンプルをTween 20(5 mM pH 9)を添加したホウ酸緩衝液で洗浄し(6000 rpmで9分)、最後に4°Cで4℃以下で保存しました。 – 5日。
ナノ粒子の調製後、テストストリップの組み立てが行われました(ESIに記載されています)。
ストリップの膜へのナノ粒子のローディング
ナノ粒子をストリップの膜にロードするために、PEG化ナノ粒子(抗体なし)の元のストックの濃度を取得し、Milli-Q水中で一連の希釈を実行して、0からの濃度範囲にしました。 (ナノ粒子を含まない純粋なMilli-Q水)最大濃度で最大10 OD / mL。これは、ICP-AESによって以前に特徴付けられた変換係数によると0.9 mg / mLに相当します。単純化と外挿のために、OD値は重量濃度よりも優先されました。したがって、前述の各希釈液の2μLをマイクロピペットでストリップのニトロセルロースメンブレンに直接添加し、室温で約2時間乾燥させました。乾燥したストリップは、照射試験の前に室温で保管されました。
ストリップ中のHCG抗原を検出するために、分析物(HCG)の一連の希釈をPBSで実施しました。各ストリップは、抗HCG抗体と結合した5μLのAuNPrを結合パッドにロードし、50μLのHCGを含む必要な希釈液をロードすることによって実行されました。ストリップは、前のテストと同様の方法で乾燥させました。
ポータブルデバイスの開発
ポータブルデバイス(図1aおよび追加ファイル1:図S1)は、サイズが小さく費用効果が高いため、組み込みシステムテクノロジと表面実装コンポーネントを使用して組み立てられました。プロトタイプの構成を図1bに示します。マザーボード(追加ファイル1:図S1)は、デバイスのコアモジュールであり、その機能はデータを処理し、残りのコンポーネントを制御することです。このモジュールは主にMCUSTM32F407で構成されており、大容量メモリと低電力動作を特長としています。電圧変換回路は、デバイス内の各モジュールに正しい電圧供給を提供するようにマザーボード上に設計されました。
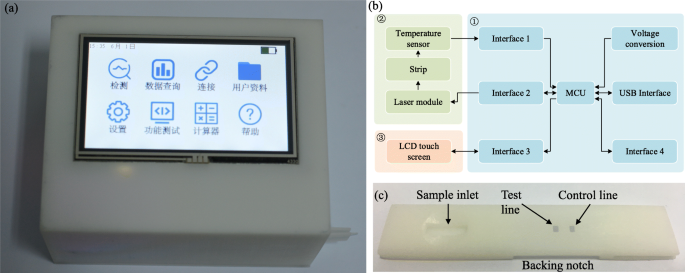
ポータブルデバイスの詳細。 a プラズモニックサーマルセンシングベースのポータブルデバイス。 b ハードウェア構成図①マザーボード、②レーザーとセンシングモジュール、③ユーザーインターフェース。 c ストリップ用カートリッジ
他のモジュールとの接続のために、マザーボードに5つのインターフェイスが適用されました。温度センサーは、センサーによって送信された温度信号を受信するために、IICインターフェースを介してマザーボードに接続されました。正確な温度測定のために、デジタル出力の温度センサーを選択しました。伝導モード用のセンサーは、16ビットの温度分解能(0.0078°C)と低消費電力(700μW)の半導体センサー(ADT7420、Analog Devices)でした。放射モードでは、17ビットの温度分解能と3.9 mWの消費電力を備えた赤外線温度計(MLX90614、Melexis)を使用しました。レーザー制御モジュールとマザーボード間のインターフェースは、マザーボードを大電流から保護しながら、レーザーダイオードを正確に管理するためのリレー制御回路で構成されていました。レーザーモジュールは、(1)レーザー制御コンポーネント(追加ファイル1:図S1)、(2)1064 nmの波長の光源を提供するレーザーダイオード(Thorlabs、M9-A64-0200)の3つのコンポーネントで構成されていました。光学最大出力は200mW、(3)レーザーモジュールに取り付けられた非球面レンズ(Thorlabs、354330-C)は、レーザーダイオードから放出された光を1mm×2.5mmの領域に収束させます。これらのコンポーネントにより、ストリップのテストラインを正確に照らすことができました。 LCDタッチスクリーン(TaoJinChi Corporation TJC4827K043_01RN、480×272ピクセル)を使用して、グラフィカルユーザーインターフェイスを提供しました。ボードのインターフェイス4は、プログラムのダウンロードとデバッグのために残されました。 USBインターフェースがデバイスに組み込まれ、バッテリーの充電ポートとして、またデバイスとオプションの外部コンピューター間の通信ポートとして機能しました。プロトタイプは10,000mAhのリチウム電池で駆動されていました。 MCUのプログラムは、IARソフトウェア(バージョン7.50.2.10505)によってコンパイルされました。グラフィカルユーザーインターフェイスは、USARTHMIソフトウェアを使用して設計されました。
プロトタイプケースとテストストリップカートリッジの設計
デバイスがユーザーフレンドリーでポータブルであることを保証するために、3D印刷されたシェルとカートリッジが設計され、デバイスの干渉防止能力と安定性が向上しました。ケースと薬莢の素材には白色の樹脂を使用しました。設計にはSolidworks2018ソフトウェアを使用しました。
直方体のケース(追加ファイル1:図S2a)と長方形の底板(追加ファイル1:図S2b)は、内部コンポーネントの形状に応じてデバイス用に設計されました。直方体のケーシングは、LCD画面とレーザーダイオード制御モジュールの固定取り付け位置を提供しました。テストストリップカートリッジを挿入するために、ハウジングの側面にある長方形のスロットが使用されました。底板にはバッテリーとマザーボードの取り付けベースが装備されていたため、コンポーネントを動かさずに底板に固定することができました。すべての検出部品は底板に固定されました。センサーとストリップカートリッジの両方のサポートフレームが底板に固定され、それらが密接に接触しました。レーザーダイオードとレンズには微調整用の移動トラックが用意されており、距離の固定と調整が可能です。ケーシング全体のサイズは133mm×108mm×73mmでした。
テストストリップを保護するために、特別なカートリッジ(図1c、15mm×4mm×70mm)が設計されました。カートリッジには3つのウィンドウがあり、1つはサンプルのロード用で、もう2つはテストラインとコントロールラインの視覚化用です。テストラインのウィンドウは、レーザーがテストストリップを通過してセンサーの検出に影響を与えないように、テストストリップの幅よりもわずかに小さく設計されています。カートリッジの背面にはバッキングノッチが作成されており、放射センサーが温度を適切に検出できるようにしながら、導電性センサーがテストラインの位置でストリップの背面に完全に接触できるようになっています。
熱検知とパラメータ計算のアルゴリズム
レーザーがナノ粒子を照射したため、テストラインで熱が発生し、検出可能な温度変化が発生しました。この発熱( Q 、W / m 3 )ナノ粒子の濃度に依存します( C 、OD / mL)、照明領域( A 、m 2 )、およびレーザー強度( I 、W / m 2 )[22]、次の式に従います:
$$ Q =CIA $$(1)レーザーがストリップを照射したときに熱信号(温度)が収集されました。照射面積とレーザー強度が一定に保たれているため、熱信号はテストラインに結合するナノ粒子の量に応じて変化します。発熱量を定量化するために、2つの方法を比較しました。 1つ目は、温度変化(追加ファイル1:図S3)を使用して熱信号を定量化しました。温度の変化(∆ T )決定のために計算されました:
$$ \ Delta T ={T} _ {\ mathrm {end}}-{T} _0 $$(2)ここで T 終了 は照射終了時に到達する最終(最高)温度であり、 T 0 は、照射開始前にセンサーによって記録された初期周囲温度です。別の方法では、曲線の下の面積の定量的計算を使用しました(AUC、追加ファイル1:図S3)。この方法では、すべての台形の加算を計算した後、10Hzのサンプリング周波数に従って曲線を台形に分割します。熱信号は、面積を検出時間( t )で割ることによって得られました。 det ):
$$ \ mathrm {AUC} =\ sum \ Limits_ {i =1} ^ n \ left(\ Delta {T} _i + \ Delta {T} _ {i-1} \ right)\ times 0.1 \ div 2 $$ (3)$$ {T} _ {\ mathrm {auc}} =AUC \ div {t} _ {\ mathrm {det}} $$(4)両方のメソッドを検出に適用すると、AUC分析により、定量の再現性が向上しました(追加ファイル1:図S4)。したがって、AUC分析は、最終的な熱の定量化に使用するために選択されました。
さまざまな検出方法のパフォーマンスを評価するために、定量化のLODを評価しました。各実験では、4つのサンプル(4つのストリップ、 n )に対して1つの濃度を測定しました。 =4)。標準偏差を考慮する(σ 0 )ブランクグループと感度( S )線形範囲の検量線の傾きである、LODを以下のように評価しました:
$$ \ mathrm {LOD} =\ frac {3 {\ sigma} _0} {s} $$(5)アッセイ手順
アッセイ手順全体は、(1)データ収集、(2)検出と結果の取得、(3)結果の表示と保存の3つの主要なステップで構成されていました。最初に、テストストリップがカートリッジにロードされ、デバイスに挿入されました。測定は、検出ボタンをタップして患者情報を入力するだけで実行されました(オプションで、代わりに匿名コードを入力できます)。情報はマイクロコントローラユニット(MCU)に送信され、保存されました。次に、MCUは温度センサーとレーザーダイオードをアクティブにしてテストを開始しました。一方、MCUが受信した温度データは、リアルタイムの表示とプロットのためにLCDに送信されました。検出後、MCUはAUC値を計算し、その結果を画面に表示しました。
結果と考察
ナノ粒子の特性評価
共役ナノプリムのUV-Visスペクトルを図2aに示します。これは、最大ピークが1130nmにあることを示しています。レーザー波長(1064 nm)でのAuNPrの吸光度は、1130 nmでの最大吸光度の92%パーセントです。 SEMおよびTEM画像(図2b、c)を収集してナノ粒子の形態を視覚化し、三角形の形状の大部分を確認しました。
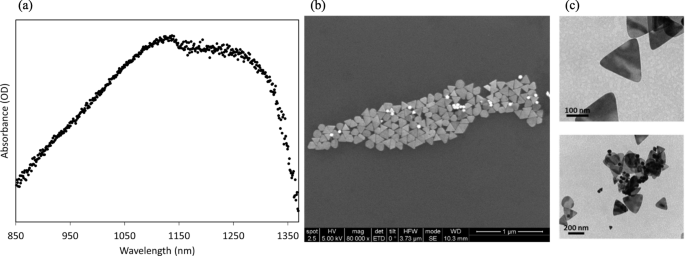
金ナノプリムの特性評価。 a ナノ粒子のUV-Visスペクトル。 b によって視覚化された非共役ナノ粒子の代表的な画像 SEMおよび c TEM
デバイスの測定条件の最適化
熱検知では、検出時間とレーザーダイオードからテストラインまでの距離が信号応答に影響を与える主な要因です[27、28]。測定条件を最適化するために、2つの要因が研究されました。照射時間を最適化するために、ストリップを10分間照射し、両方のセンサーでそれぞれ温度変化を記録しました。図3aからわかるように、温度は10分以内に上昇し続けましたが、温度の上昇は120秒後にプラトーに達し始めました。この結果は、時間の経過に伴う熱信号の変化で同様の傾向が観察された以前の研究と一致しています[28]。 POCTと消費電力の要件を考慮して、デバイスの検出時間は120秒に設定されました。
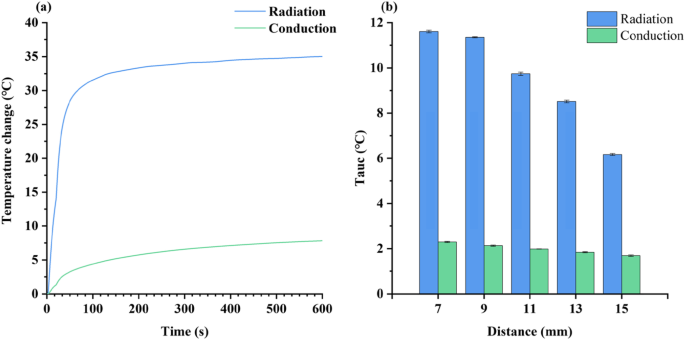
熱センシングの最適化。 a 10分間の照射で温度が変化します。 b 異なる照射距離での熱信号
次に、距離の最適化が実行されました。図3bは、レーザーダイオードとテストラインの間の距離が長くなるにつれて熱信号が減少することを示しています。その理由は、距離が有効照射面積を増加させるにつれて、テストラインに到達するレーザー出力が減衰したためである可能性があります。最大の信号応答を得るために、距離は7mmに設定されました。
温度センシングに対する周囲温度の影響
熱感知は温度と密接に関連しているため、周囲温度が熱感知にどのように影響するかを調査する必要がありました。インキュベーターを使用して、周囲温度を27.5〜40℃の範囲にした。 2.5°Cの間隔で各温度ポイントで合計4つのサンプルが測定されました。周囲温度と熱信号の曲線は、両方の熱検知方法によって、ブランクストリップと1 OD / mLストリップでそれぞれ測定されました。周囲温度のフィッティング曲線のパラメータを表1に示します。図4aは、伝導モードでは、曲線の傾きがさまざまな濃度でほぼ一貫していることを示しています。これは、周囲温度の変化がさまざまな濃度に同じ影響を及ぼしたことを示しています。その結果、周囲効果曲線を使用して、定量的な結果を較正できます。放射線モードでは、2つの濃度に対応する曲線(図4b)の傾きは互いに一致していましたが、両方の曲線は下降傾向を示しました。この結果は、高温変動のある条件下でサンプルを測定する場合、伝導モードの信頼性が高いことを示しています。
<図>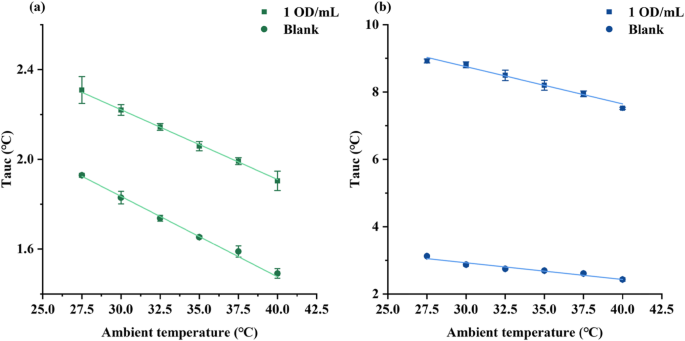
周囲温度の影響。 a 伝導モードでは、熱信号は周囲温度によって変化します。 b 輻射モードでは、熱信号は周囲温度によって変化します
ナノ粒子の定量化
熱センシング検出
標準の定量曲線を取得するために、2つの熱検知方法(追加ファイル1:図S5)をそれぞれ使用して、0〜10 OD / mLの範囲のナノ粒子を含むテストストリップを検出しました。さまざまな濃度のナノ粒子を含むこれらのストリップ(追加ファイル1:図S6a)は、前述のポータブルデバイスによって検出されました(「材料と方法」のセクションを参照)。デバイス内の両方のセンサーの設定は、追加ファイル1:図S5aおよびS5bに示されています。 27.5°Cの周囲温度で、各濃度について4つのサンプルをテストしました。デバイスは、AUC法を適用して、テストラインでの熱信号を計算しました。したがって、熱信号の定量化は、テストライン上のナノ粒子の量に比例していました。定量化曲線(図5a)は、ナノ粒子の濃度に対する熱信号から得られたデータの線形回帰によって生成され、表2の式で表されます。
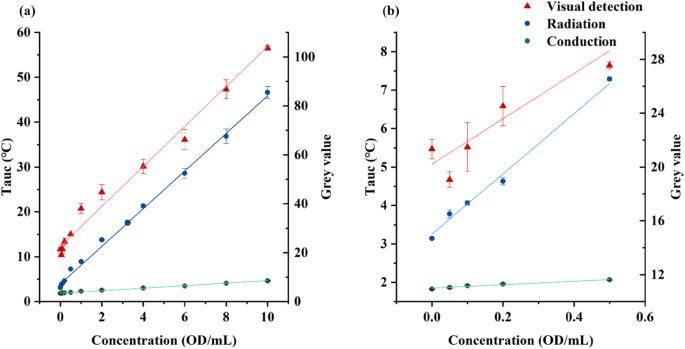
ナノ粒子の定量化。 a 3つの方法での標準的な定量曲線。 b 定量的な結果は、線形曲線で低濃度になります
表2は、放射モードの感度が伝導モードの感度の15倍であることを示しています。伝導モードと放射モードのLODは、それぞれ0.053 OD / mLと0.023OD / mLでした。熱検知では、放射モードは伝導モードと比較して検出限界(LOD)を2倍改善しました。追加ファイル1:図S7に示すように、LFAストリップの安定性もテストされました。導電性熱検知モードでは、2つの固体間で熱を伝達する必要があります。テストラインの温度が急激に上昇すると、センサーがテストラインと同じ温度に達するまでに時間(緩和時間)がかかります。その結果、センサーの温度は、検出終了時のテストラインの実際の温度よりも低くなりました。一方、放射モードでは、センサーがテストラインによって照射されたIR波を直接検出して現在の温度を取得するため、センサーへの熱の伝達は必要ありませんでした。伝導モードの検出では、ヒートシンクとして機能する優れた熱伝導体の存在により熱の一部が放散されましたが、放射検出では、空気とストリップ自体のみが熱放散に介入しました。これらの理由は、伝導法の感度が放射法よりも低いことを説明することができます。
When testing strips with a concentration of 10 OD/mL, we found that there was a burning mark using the radiation (non-contact) sensing mode. One possible reason for this phenomenon is that in the non-contact measurement, the low thermal conductivity of the air allows the heat to be retained in the test line and dissipate less efficiently, increasing the effective local temperature and eventually causing the combustion of the membrane.
In the contact mode of detection, however, the sensor with a large thermal conductivity acted as medium and heatsink. In this way, heat was conducted to the sensor so that no combustion occurred in the test line.
Comparison Between Thermal Sensing and Visual Detection
Due to its popularity for portable devices and wide use, we compared the thermal sensing with visual detection for its detection ability. For visual detection, the pictures of the strip were taken by a conventional microscope digital camera. The test strips were mounted in the cartridge to ensure the positional consistency of the image analysis in a similar fashion than with the thermal sensing. Software Image J was used to analyze the grey value in the test line for different concentrations of nanoparticles. A standard curve (Fig. 5a) of the visual detection method was plotted based on the results of this analysis. The linear range between the grey value and the concentration of nanoparticles was 0.2–10 OD/mL (R 2 was 0.770 for the range of 0–0.2 OD/mL, so they were thus discarded from further analysis). The detection limit was 0.268 OD/mL. The results indicated that thermal sensing could reduce LOD by 5- to 12-fold compared to visual detection. In Qin’s research, they found that the LOD for visual analysis was 100-fold higher than thermal contrast [21]. Since they employed a high laser power and an infrared camera, they gained greater difference in LOD. One reasonable explanation for the LOD improvement is that thermal sensing is able to measure the nanoparticles on top and beneath the membrane surface. Another advantage of thermal sensing is that it has a higher stability than visual detection. Thermal sensing generates heat by the nanoparticles on the entire test line. Visual detection relies only on the color reaction of the nanoparticles on the surface of the test line. Even if the analyte concentrations of two test strips are the same, the distribution of the nanoparticles on the T-line in the tangent plane is different; thus, the visual inspection will result in a difference in the detection results while the thermal sensing is more stable and reproducible. On the contrary, the sensitivity of the visual detection was 2-fold higher than thermal sensing. Visual detection is a direct method for quantifying nanoparticles, while thermal sensing is an indirect measurement of the concentration of the nanoparticles by measuring the temperature changes, which may partially explain the lack of sensitivity. Figure 5b demonstrates that the linear range of detection for thermal sensing can be as low as 0 OD/mL, with the R 2 of 0.972 (conduction) and 0.987 (radiation), suggesting that thermal sensing has a better potential for its applications in early detection in POCT than color quantification, since the target analytes are in lower concentrations.
Quantitative Detection of HCG
Finally, the biomarker HCG was quantified using our system in order to validate the thermal sensing. Both conduction and radiation modes were applied to quantify the HCG. The optical power was turned down to 150 mW, preventing the strips from burning. Strips (Additional file 1:Figure S6b) with four different concentrations were tested. Figure 6a and b show that the thermal signals were linear to the concentration of HCG from 35 to 700 mUI/mL. When the concentration was extended to the range of 35–7000 mUI/mL, the linearity was between the logarithm of the concentration and the thermal signal as in Fig. 6c, d. In conduction mode, the LOD was 64.2 mIU/mL which is in a similar range than the visual detection. However, the ideal LOD of the radiation mode was 2.8 mIU/mL. The data matched with the quantification of nanoparticles. Compared with other devices that applied photothermal effect (LOD =5.5 mIU/mL) [27], our device in radiation mode reduced the LOD by nearly 2-fold. Those results proved that thermal sensing is an effective way in LFA detection and quantification.

The standard curves of HCG. a A linear curve between the logarithm of the HCG concentration and the thermal signal in radiation mode. b A linear curve between the logarithm of the HCG concentration and the thermal signal conduction mode. c The quantification results of HCG in radiation mode. d The quantification results of HCG in conduction mode
結論
A plasmonic thermal sensing method for LFA detection was established. A portable device based on this method was developed by applying different temperature sensors (conduction and radiation modes). The study of the influence of the ambient temperature demonstrated that it has a negative impact on the thermal sensing and conduction mode was less affected than radiation mode. In radiation mode, the impact was more significant at high concentrations. Both modes were also tested to compare the quantification ability. When compared with the traditional visual detection, the thermal sensing methods showed a 5- to 12-fold improvement in LOD for nanoparticle quantification. The radiation mode showed a better performance than conduction mode in both sensitivity and LOD. In the validation of thermal sensing, LFA strips for the detection of HCG were tested and the results demonstrated that the radiation mode was much more sensitive than the conduction mode. In this way, we proved that thermal sensing is a feasible and effective way for early detection in LFA platforms.
In conclusion, plasmonic thermal sensing can truly improve the analytical sensitivity and shows a promising future in LFA detection for early diagnostic applications. The portable device described herein provided two sensing approaches to satisfy different requirements.
データと資料の可用性
現在の研究中に使用および/または分析されたデータセットは、合理的な要求に応じて対応する著者から入手できます。
略語
- AUC:
-
Area under the curve
- AuNPrs:
-
Gold nanoprisms
- BSA:
-
ウシ血清アルブミン
- CCD:
-
電荷結合デバイス
- CMOS:
-
相補型金属酸化膜半導体
- HCG:
-
Human chorionic gonadotropin
- LFA:
-
Lateral flow assay
- LOD:
-
検出限界
- LSPR:
-
局在表面プラズモン共鳴
- MCU:
-
Microcontroller unit
- MES:
-
4-Morpholineethanesulfonic acid
- NIR:
-
近赤外線
- PBS:
-
リン酸緩衝生理食塩水
- POCT:
-
ポイントオブケア検査
- PVC:
-
Polyvinyl chloride
- PVP:
-
Poly-vinyl-pyrrolidone
- S-NHS:
-
N -ヒドロキシスルホスクシンイミド
ナノマテリアル
- Future Electronics:熱画像およびIRセンシングのための迅速な開発プラットフォーム
- 卵巣癌細胞の高感度かつ迅速な検出のための柔軟なグラフェンベースのバイオセンサーのデモンストレーション
- Au @ TiO2卵黄シェルナノ構造の調製とメチレンブルーの分解および検出へのその応用
- 4-ニトロフェノールセンシング用のレシオメトリック蛍光プローブとしての分子インプリントコアシェルCdSe @ SiO2 / CD
- 面内結合と面外結合の混成に基づく光学活性プラズモンメタ表面
- 一対のアプタマーを使用したサンドイッチイムノフローストリップアッセイによるロンガライトの迅速な検出
- スマートフォンベースのリーダーを使用した疾患バイオマーカーの高感度検出のためのプラズモニックELISA
- 磁気共鳴画像法における腫瘍早期発見のためのデュアルインテグリンαvβ3およびNRP-1標的常磁性リポソーム
- アルツハイマー病のバイオマーカーとしてのコレステロール検出のための磁性ナノ粒子に基づく新しい造影剤
- Ambarella、Lumentum、ON Semiconductorは、次世代AIoTデバイス向けのAI処理ベースの3Dセンシングで協力しています
- フロープロファイルとフリーフォーミング用のデュアルスピンドル