


触覚センシング用のナノグレーティングベースの柔軟で伸縮性のある導波路
要約
光導波路と柔軟な光学材料の関連する特性に基づいて、触覚に向けられた柔軟で伸縮性のある光導波路構造が提案されている。光導波路の検出原理は、出力光の損失によって引き起こされる機械的変形に基づいています。これは、不規則な表面に適合できない従来の光導波路デバイスの欠点を克服します。柔軟で伸縮性のある光導波路は、ナノレプリカ成形法で製造されており、触覚センシングの分野で圧力とひずみの測定に適用されています。柔軟で伸縮性のある光導波路のひずみ検出範囲は0〜12.5%、外力検出範囲は0〜23×10 –3 N。
はじめに
光導波路は、光波の透過を誘導する構造です[1,2,3,4]。従来の剛性光導波路は、フレキシブルエレクトロニクスやソフトロボティクスの要件を満たすことができません[5、6、7]。柔軟で伸縮性のあるデバイスは、人間と機械の相互作用の知覚を実現でき、高度な柔軟性、伸縮性、適応性、感度、生体適合性を備え、電磁干渉の影響を受けないロボット触覚センシングシステムにとって重要な部分になります[8、 9,10,11,12]。王ら。圧力感度24.63kPa -1 のTi3C2 / MCバイオコンポジットフィルムに基づくバイオインスパイアードフレキシブル圧力センサーを製造 、およびシルクフィブロイン-MXeneフィルムは、生体適合性と高性能を備えた圧力センサーとしても使用されていました[13、14]。蘭ら。 IR光の高コントラストイメージング用の柔軟な生体模倣赤外線(IR)検出増幅システムを製造し、ピーク感光性は7.6×10 4 に達する可能性があります。 1342nmの波長で[15]。ナノグレーティング構造に基づく柔軟で伸縮性のある光導波路は、柔軟性と伸縮性を備えた触覚センシングデバイスに製造することができ、ウェアラブル電子機器やロボット工学の分野で幅広い用途があります。 Li etal。曲げ可能なカルコゲニドガラスに基づいて柔軟な導波路デバイスを製造し、多神経軸理論を使用してひずみ分布を最適化しました[16]。また、ガラス導波路は、42%の引張ひずみの伸縮性を備えた曲がりくねった形状に設計されていました。新規の柔軟な光学材料に加えて、多くの最先端の製造技術が、柔軟で伸縮性のある導波路製造に使用されてきた[17、18]。 Samusjew etal。インクジェット印刷により光重合の柔軟で伸縮性のある光導波路を作製し、導波路の伸縮性は120%でした[19]。ナノグレーティング構造に基づく光導波路デバイスの柔軟性と伸縮性を実現するには、光透過性を備えた新しい軟質材料が基礎として必要です。今日、柔軟で伸縮性のある光子検知デバイスを作るために使用される新しい材料が継続的に開発されています[11、20]。それらには、透明性、柔軟性、伸縮性など、いくつかの共通の特徴があります。これらの新しい光学軟質材料は、エラストマー、コロイド結晶、ヒドロゲル、合成オパールのカテゴリーに分類できます[21、22、23]。柔軟な光学材料とマイクロ/ナノ製造技術に基づく柔軟で伸縮性のある光導波路デバイスの段階的な開発に伴い、触覚、ウェアラブル電子機器、および個人の健康診断における柔軟で伸縮性のある光導波路のアプリケーションが徐々に拡大しています。アンドレアスら。被覆層としてポリスチレンポリマーを使用し、透過層としてフッ素化ポリマーを使用して、引張強度が300%を超える可能性のある超高伸縮性および弾塑性光導波路センシングデバイスを作成しました[24]。アレクサンダー等。ホログラフィック技術とUVテンプレート硬化法を使用して、ベンゾフェノン感光性分子と混合されたPDMS材料上に柔軟な回折格子光を準備しました[25]。多くの研究者が柔軟または伸縮性のある光導波路を実装していますが、特にロボットの触覚センシングの分野では、柔軟で伸縮性のある光導波路の研究の進歩はほとんどありません。
この論文では、新しい柔軟で伸縮性のある光導波路が設計され、ナノレプリカ成形プロセスで製造されました。柔軟で伸縮性のある光導波路は重要な触覚検知デバイスであり、ウェアラブルおよびヘルスケアアプリケーションの圧力およびひずみ検知を実現するために使用できます。柔軟で伸縮性のある導波路は、PDMSを基板としてシリコンマスターウェーハ上に製造されました。ナノグレーティングマスターウェーハを使用して、イン/アウトカプラーとして光導波路上にグレーティング構造を作成しました。関連するすべてのパラメータは、製造プロセス中に分析および計算されています。製造された柔軟で伸縮性のある光導波路は、触覚センシングの分野での圧力とひずみの測定に適用されています。
メソッド
柔軟で伸縮性のある導波管の原理
柔軟で伸縮性のある光導波路センサーの場合、ガイド層の屈折率はn 導波路です。 導波路の周囲環境の屈折率係数はn 外部です。 、次の関係を満たします:
$$ n_ {導波管}> n_ {外部} $$(1)本論文では、光導波路層としてPDMSを選択し、その屈折率係数は空気屈折率係数1.0よりも高い1.41であるため、単純な光導波路として使用することができます。触覚センシングを実現するには、触覚センシングに基づく柔軟で伸縮性のある光導波路が、周囲環境のさまざまな物理的パラメータ(圧力、ひずみなど)を検出できる必要があります。柔軟で伸縮性のある光導波路検知デバイスが外部環境の影響を受ける場合、出力光パワー強度は、応力またはひずみによって引き起こされる機械的外乱に本質的に関連しています。出力光強度の変化に応じて、外部環境力による柔軟で伸縮性のある光導波路の変形を確立することができます。出力光強度の変化を計算することにより、外部の物理的変動を定量的に測定できます。
図1aに示すように、柔軟で伸縮性のある光導波路センシングデバイスの概略図。柔軟で伸縮性のある光導波路の部分には、次のものが含まれます。1、柔軟で伸縮性のある光導波路フィルム。 2、周期的なナノグレーティングの深さ; 3、光導波路の長さ; 4ナノグレーティング期間; 5、ナノグレーティング幅; 6、グレーティング結合入力、7、グレーティング結合出力。柔軟で伸縮性のある光導波路のグレーティング結合は、入力および出力光強度に対するパート6のグレーティング結合領域とパート7のグレーティング結合領域で構成されています。光導波路の検知は、図1bに示すように、外部物理量(圧力、ひずみなど)を使用して柔軟で伸縮可能な光導波路によって実行され、出力光強度と外部物理量の変化との対応する関係を取得します。 。
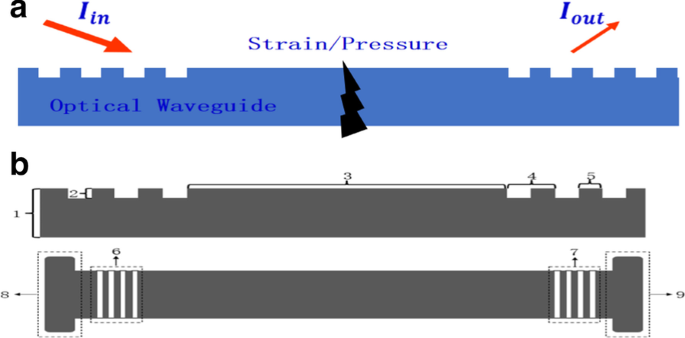
a 圧力とひずみの検知原理、 b 柔軟で伸縮性のある光導波路の概略図
光波のビームが特定の角度でグレーティングカプラーから光導波路に結合されると、光導波路内で距離Lを透過し、出力グレーティングカプラーを介して結合されます。出力光強度はI 0 であると想定されます。 。柔軟で伸縮性のある光導波路構造が、加えられた外圧FまたはひずみSによって変形されるとき、光導波路出力の対応する光強度変化は、ΔI <sub> 0 <sub>である。 したがって、出力光の強度と圧力の関係は次のようになります。
$$ \ Delta I_ {0} =f \ left(F \ right)$$(2)光強度の変化と加えられたひずみの関係は次のとおりです。
$$ \ Delta I_ {0} =f \ left(S \ right)$$(3)シミュレーション結果と分析
柔軟で伸縮性のある光導波路構造材料は、柔軟性と伸縮性を備えた柔らかい材料です。柔軟で伸縮性のある光導波路が触覚感知を行う場合、変形プロセス中に設定された応力のために、デバイスが損傷したり、正しく機能しなかったりする可能性があります。そのため、柔軟で伸縮性のある光導波路デバイスを製造する場合、異なる材料で作製したフォトニック結晶構造の静的シミュレーションを行い、外力を受けて引張変形を生じたときの構造内の内部応力とひずみの分布を分析する必要があります。 。有限要素シミュレーションにはABAQUSソフトウェアを使用しました。モデルパラメータは次のように確立されました:格子周期850 nm、デューティサイクル0.5、材料の厚さ2 mm、格子の高さ200ミクロン、ヤング率は1 MPa、ポアソン比は0.48、PDMSの密度は0.98 g / cmに設定されています 3 。荷重は、光導波路の両側に加えられる引張変位として定義され、他の方向は固定されています。つまり、デバイスは水平方向に10%引き伸ばされます。 PDMS光導波路の応力-ひずみモード分布図を図2に示します。図2aから、ひずみの形態変化は主に格子層構造の下部に分布しており、ひずみは対称的かつより均一に両側に分布します。図2bに示すように、応力集中は主にグレーティングとブロック構造が接続されている部分にあり、最大応力は0.13MPa未満です。機械的シミュレーション分析は、PDMSに基づく格子構造導波路が非常に優れた引張特性を持ち、シミュレーション実験が柔軟で伸縮性のある光導波路構造のひずみ検知機能の安定性をサポートすることを示しています。
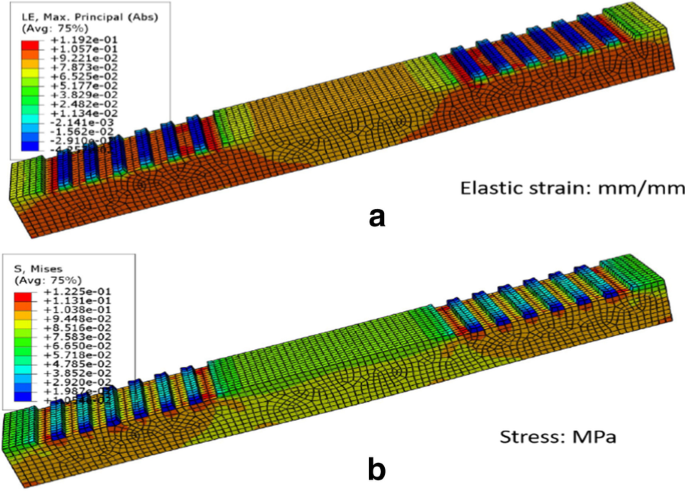
柔軟で伸縮性のある導波路の有限要素シミュレーション: a 弾性ひずみ; b ストレス
フレキシブル光導波路触覚センサーの検知原理は、光が光導波路に結合されて透過すると、外部の応力とひずみによって光透過損失が発生し、損失を計算することによって応力とひずみの検知の目的が達成されるというものです。したがって、ナノグレーティング構造に基づいて設計された光導波路デバイスの場合、光導波路内の光の透過状態を検証するために電界シミュレーションが必要です。電磁シミュレーション実験では、FDTD電磁シミュレーションソフトウェアを使用して解析と設計を行います。設計された光導波路は対称構造であるため、両端のグレーティングカプラーを研究対象として選択します。グレーティングのデューティサイクルは0.5、グレーティングの周期は、グレーティングの高さはです。その基本構造を図3aに示します。ガウス赤色光ビームが13.54度の入射角で光導波路に結合されると、ほとんどの白色光ビームが光導波路に結合され、光導波路の水平方向に沿って伝播することができます。実験では、図3bに示すように、ビームが特定の入射角で光導波路に入ると、ビームが光導波路内を部分的に伝搬して結合できることが確認されました。
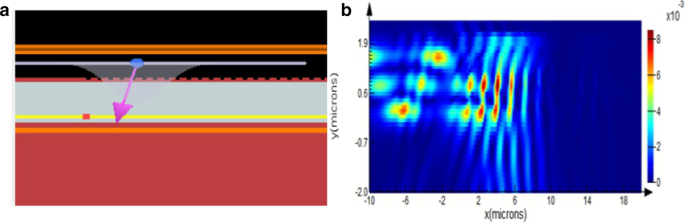
a 光結合プロセスのシミュレーション構造、 b 結合光の電磁分布
製造
柔軟で伸縮性のある光導波路の入力および出力モードは、Siマスターグレーティングテンプレートを使用したナノレプリカ成形によって製造されるグレーティングカップリングです。柔軟で伸縮性のある光導波路の製造に使用できる柔軟な光学材料には、PDMS、SU8、PMMA、および曲げ可能なカルコゲニドガラスが含まれます。柔軟で伸縮性のある導波路の製造プロセスは次のとおりです。(1)マスターウェーハテンプレート。ナノグレーティングテンプレートのグレーティング周期は850nm、曲線因子は0.5(LightSmyth Technologies、Inc。)です。 (2)表面改質。準備したシリコンウェーハテンプレートを疎水性シランに入れ、15分間浸しました。次に、それをIPAで洗浄し、窒素ガスで乾燥させて、Si格子テンプレートの表面特性を(親水性から疎水性に)変化させた。 (3)犠牲層。ポリビニルアルコール(PVA)溶液(濃度10%)を4 '' Siウェーハ上にスピンコーティングし、75 0 で乾燥させました。 Cで30分。 (4)グレーティング導波路のテンプレート。 2つの855nmSiグレーティングをPVA犠牲層の上に配置しました。 2つの格子テンプレートの向きが同じで、格子が上を向いていること、およびテンプレート間の相対距離があることを確認してください。 (5)未硬化PDMSのコーティング。未硬化のPDMSと硬化剤を10:1の比率で混合します。次に、未硬化のPDMSを攪拌して均一に混合します。その後、混合物を真空ボックスに入れ、10分間脱気します。最後に、未硬化のPDMSがグレーティング導波路テンプレートにスピンコーティングされます。 (6)PDMSベースの導波路を剥がします。 PVA上に固化した光導波路を水中に置き、10時間浸してPVAを溶解します。図4に示すように、柔軟で伸縮性のある光導波路を取り出し、シリコン格子テンプレートから導波路を剥がします。このペーパーで設計された柔軟で伸縮性のある光導波路構造のサイズは調整可能です。その後のアプリケーションでは、研究者は要件に基づいて光導波路の構造サイズを調整できます。柔軟で伸縮性のある光導波路は、主に次の2つの側面から調整できます。(1)Siテンプレートのサイズを小さくします。 (2)グレーティング透過層の距離を短くします。上記の2つの方法により、柔軟で伸縮性のある光導波路のサイズを、パッケージングのニーズに応じて適応的に設計および製造できます。
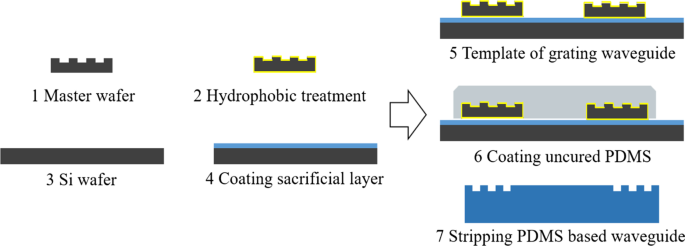
柔軟で伸縮性のある光導波路センサーのナノレプリカ成形製造プロセス
ナノグレーティング構造は、大規模なコピーと成形によって作られています。図5aに示すように、選択したシリコングレーティングテンプレートの周期は850 nm、デューティサイクルは0.5、グレーティングの高さは200nmです。ナノグレーティング形態の品質は、入力光と出力光の結合効率を決定します。レプリカ成形に基づくナノグレーティングのAFM画像は、図5bのようになります。この図から、ナノ格子構造をシリコン格子テンプレートからPDMS基板に良好な一貫性で転写できることがわかります。選択されたナノレプリカ成形方法は、柔軟で伸縮性のある光導波路製造の要件を満たすことができると結論付けることができます。
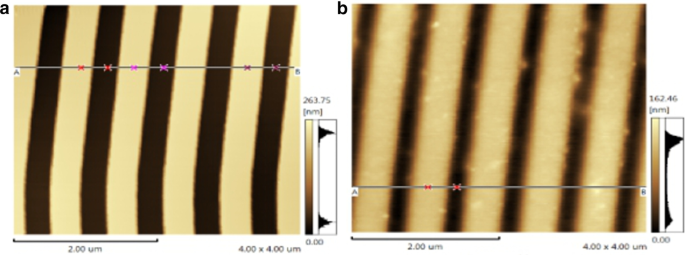
ナノグレーティングのAFM画像: a Siナノグレーティングテンプレート、 b PDMS上のナノレプリカ成形格子
結果と考察
センシングプラットフォーム
柔軟で伸縮性のある導波管を使用した触覚センシングの応力とひずみを測定するために、柔軟な触覚センシングプラットフォームが構築されました。柔軟で伸縮性のある光導波路実験プラットフォーム全体を図6aに示します。これには、主に次のプロセスが含まれます。(1)入射光源。入射光として、波長が632.8nmのレーザーポイントが選択されています。 (2)光源の位置と姿勢の調整装置。これは、入射光源の位置を固定し、その入射角をリアルタイムで調整するために使用される機械装置です。 (3)引張測定装置。ノギスと非標準の固定部品で構成された引張測定装置。柔軟で伸縮性のある光導波路の初期長と、それに対応する実験での伸縮長の変化を正確に測定するために使用できます。 (4)光検出器。光検出器PM100D(当社)の光強度検出範囲は500nW〜500mWです。この実験プラットフォームでは、光検出器を使用して、柔軟で伸縮性のあるPDMSベースの光導波路の出力光強度の変化を検出し、出力光強度の変化量に基づいて関連する圧力とひずみを計算できます。この触覚センシング実験プラットフォームは、低コストで互換性があり、触覚センシングの圧力とひずみを検出するために使用できます。ひずみの精度は0.1%に達する可能性があり、ノギスの精度は0.02mmです。同時に、光検出器を使用して出力光強度の変化を検出し、フォトダイオードプローブの分解能は10PWです。ナノレプリカ成形で作製した柔軟で伸縮性のある光導波路を図6に示します。カラフルな四角い部分が柔軟で伸縮性のある光導波路の入力部分と出力部分で、中央の透明部分が光透過領域です。カラフルな効果は、格子表面での光の回折によって生成されます。柔軟な伸縮性光導波路を図6bに示します。色付きの領域は柔軟な伸縮性光導波路の入力ポートと出力ポートであり、中央の透明な領域は光導波路の透過領域です。回折格子の入力ポートと出力ポートのカラー画像は、回折格子表面での光の回折によって生じます。
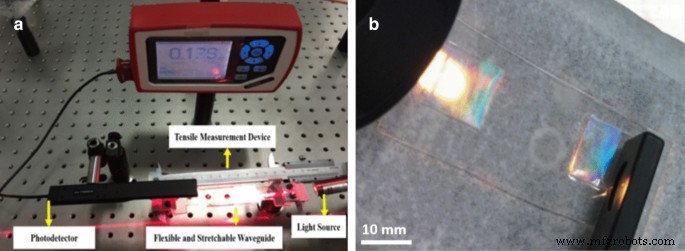
a 触覚センシングプラットフォーム、 b ナノグレーティングベースの柔軟で伸縮性のある光導波路
触覚センシング実験
触覚センシングでは、圧力とひずみは2つの物理量であり、外部環境と相互作用するときにロボットの触覚センサーに関係することがよくあります。圧力とひずみをリアルタイムで正確に認識することで、ロボットは外部の物体と相互作用する機械的変形の程度を正確に捉えることができ、その後の最適なフィードバック操作が容易になります。
柔軟で伸縮性のある光導波路の試験方法は次のとおりです。(1)安定した光ビームを使用して、固定角度で結合格子を介して柔軟で伸縮性のある光導波路の導波路透過層に入射します。光導波路デバイスのもう一方の端では、光検出器を使用して、出力グレーティングカプラからの出力光を収集します。 (2)柔軟で伸縮性のある光導波路に外力を加えると、光導波路の構造が変化し、出力光強度が減衰します。光強度の減衰を分析することにより、外力を正確に測定することができます。 (3)柔軟で伸縮性のある光導波路に外部ひずみを加えると、出力光強度の変化に応じてひずみを正確に測定することもできます。柔軟で伸縮性のある光導波路の圧力試験を実施した。この実験では、柔軟で伸縮性のある光導波路をノギスの2つのスライドヘッドで固定し、632.8nmのレーザー光源を調整して最適な角度で入力格子ポートに結合します。最適な角度の位置は、グレーティングの出力端でパワーメータが受け取る最大パワーに関連しています。柔軟で伸縮性のある光導波路の中央領域では、圧力計を使用して徐々に圧力を加え、圧力値と光強度の対応するデータを記録します。
実験結果を図7aに示します。図によると、光導波路の出力光強度は、加えられた圧力が増加するにつれて減少し、圧力変化と出力結合光強度の間には線形相関があります。柔軟で伸縮性のある光導波路の圧力検出範囲は、0〜25×10 –3 です。 N。
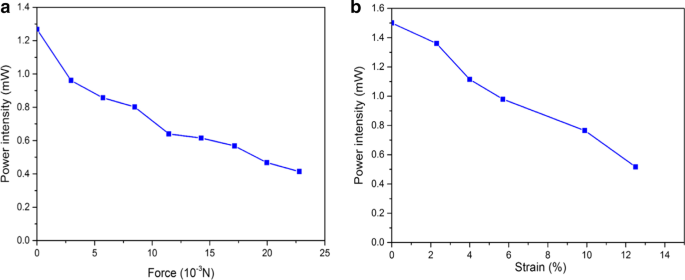
柔軟で伸縮性のある光導波路センシング実験: a 圧力対光強度損失応答グラフ、 b ひずみ対光強度損失応答グラフ
柔軟で伸縮性のある光導波路のひずみ検知実験は、スケールを備えた伸縮機構によって行われます。まず、柔軟で伸縮性のある導波管は、重力による曲がりを防ぐために事前に伸ばされているため、水平状態になり、初期の長さはL 0 ノギスによって記録されます。次に、柔軟で伸縮性のある光導波路がノギスの両端のクランプ機構によって引き伸ばされ、引き伸ばされた後の長さがLとして記録され、対応するひずみSは次のように計算できます。
$$ {\ text {S}} =\ frac {{L --L_ {0}}} {{L_ {0}}} $$(4)柔軟で伸縮性のある光導波路に基づくひずみ検知の実験結果を図に示します。図によると、加えられたひずみの増加に伴い、柔軟で伸縮性のある光導波路の出力光強度は徐々に減少した。さらに、加えられるひずみが増加するにつれて光パワーは減少し、それらの間には線形相関があります。一方、図7bに示すように、柔軟で伸縮性のある光導波路のひずみ検知範囲は0〜12.5%で、ひずみ精度は0.1%です。
センシングシステムは、柔軟で伸縮性のある光導波路と光検出器(PM100Dデジタルパワーメータ)の2つの部分に分けることができます。 PDMSベースの光学センサーで透過する光の遅延は非常に小さく、無視できるため、応答と回復速度は主に光検出器に依存します。また、検出システムのパワーメーターの応答速度は25Hzです。したがって、柔軟で伸縮性のある光導波路センサーの応答時間は40ミリ秒です。柔軟で伸縮性のある光学センサーのサイクル安定性は、加えられたひずみと圧力をロードおよびアンロードすることによって調査されます。特定の負荷がかかった場合、繰り返しの実験を通じてストレッチの数を数えます。そして、その結果は、それが安定して3000回以上伸ばすことができることを示しています。さらに、PDMS材料をPAAm(ポリアクリルアミド)と混合すると、材料は30,000サイクル以上の負荷に耐えることができます[26]。
今日、柔軟で伸縮性のある光学デバイスを製造するためのいくつかの課題があります。主な理由は、ストレッチに使用できる透明で柔軟な光学材料が実際に限られていることです。もう一つの理由は、柔軟な光学材料に基づくマイクロおよびナノ構造のラピッドプロトタイピングと製造を実現するために使用できる新しい製造技術を開発する必要があることです。柔軟で伸縮性のある光導波路は独自の設計であり、導波路のコア層としてPDMSを使用すると、導波路の損失が増加します。最近、いくつかの柔軟な光学材料が提案された[21、27、28、29、30]。 Wan etal。セルロースナノ結晶と水性ポリウレタンラテックスを使用して柔軟なフォトニックペーパーを製造しました[31]。将来的には、これらの関連する柔軟な光学材料を使用して、光導波路構造を改善することができます。
結論
要約すると、柔軟で伸縮性のある導波路は、触覚センシング、ヘルスケア、およびフレキシブルエレクトロニクスの分野でのアプリケーションに適しています。柔軟で伸縮性のある光導波路は、シリコン格子テンプレートを備えた柔軟な光学材料上に製造され、ナノ格子構造は、ナノレプリカ成形によって柔軟な光学材料に転写することができます。製造された柔軟で伸縮性のある光導波路には、ラピッドプロトタイピング、低コスト、製造が容易であるという利点があります。柔軟で伸縮性のある光導波路の製造技術が研究されており、最適な製造技術は、犠牲層の準備プロセス、シリコン格子テンプレートの準備、疎水性処理、および柔軟な材料の準備技術の組み合わせによって開発されました。柔軟で伸縮性のある光導波路のひずみ検出範囲は0〜12.5%、外力検出範囲は0〜23×10 –3 N.柔軟で伸縮性のある光導波路ベースのセンシングデバイスは、従来の剛性光導波路と比較した場合、柔軟性、伸縮性、および曲面への適合が容易であるという特徴があります。このデバイスで使用される柔軟な光学材料はPDMSであり、これを使用して、柔軟で伸縮性のある光導波路の引張特性を最大50%以上向上させることができます。このデバイスは、柔軟で伸縮性のある光導波路の伸縮性と柔軟性を十分に発揮し、外部の物理量(圧力、ひずみなど)の変化によって引き起こされる光導波路の出力光パワー強度の変化を正確に測定できます。
データと資料の可用性
すべてのデータは制限なしで完全に利用可能です。
略語
- IPA:
-
イソプロピルアルコール
- DI水:
-
脱イオン水
- FDTD:
-
有限差分時間領域
- PDMS:
-
ポリジメチルシロキサン
ナノマテリアル
- Future Electronics:熱画像およびIRセンシングのための迅速な開発プラットフォーム
- ADI:生物学的および化学的センシングのためのインピーダンスおよびポテンシオスタットAFE
- スマートホームロックとアクセス制御のためのインテリジェントな回路保護とセンシング設計
- 予知保全要員のための聴覚的、視覚的および触覚的検査
- ドラッグデリバリーを強化するためのナノファイバーとフィラメント
- 卵巣癌細胞の高感度かつ迅速な検出のための柔軟なグラフェンベースのバイオセンサーのデモンストレーション
- 癌治療のためのナノ粒子:現在の進歩と課題
- ナノクラスターの魔法の数学的関係—正誤表と補遺
- ABBとエリクソンが提携して柔軟な工場のワイヤレス自動化を加速
- ロボットの手と腕のためのソフトセンシング、自己修復材料
- AIとヒューマノイド開発のための精神感覚電子皮膚技術