


MIT CSAILのロボヒトデは、水生生物のより詳細な研究を可能にします
科学者たちは、Adam Conner-Simons(MIT CSAIL)が報告しているように、水生生物についてより多くの洞察を与える「ロボヒトデ」を発明しました。 (下のビデオを参照してください。)
生物学者は、海洋生物を記録するという課題を長い間経験してきました。多くの種類の魚が、人間の水中の動きに非常に敏感であることが証明されています。
考えられる解決策として、コンピューター科学者は、炭素ベースの対応物の間をこっそりと移動できる特殊な海洋ロボットを開発しています。たとえば、2018年には、MITのコンピュータ科学人工知能研究所(CSAIL)のチームが、フィジーのサンゴ礁に沿って本物の魚と自律的に泳ぐ柔らかいロボット魚を製作しました。
ただし、水の動きの複雑なダイナミクスと、完全に優れた電子システムをすばやく破壊する能力により、水中ロボットは、空中または陸上用のロボットと比較して、開発が特に困難になっています。
魚の場合、CSAILチームは、実際に水中で確実に機能するように、設計を手動で微調整するために数か月の試行錯誤を繰り返す必要がありました。
そのロボットは特に複雑なものでしたが、MITのWojciechMatusik教授とDanielaRus教授が率いるグループは、製造プロセスをスピードアップする余地があると感じていました。そのことを念頭に置いて、彼らは機能的なソフトロボットを数時間でシミュレーションおよび製造するための新しいツールを作成しました。
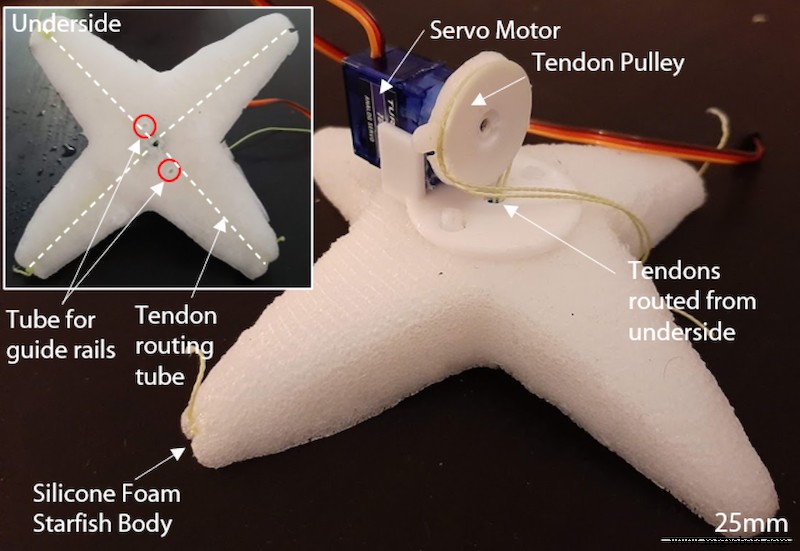
チームはシステムを使用して、シリコンフォームでできており、単一の低電力アクチュエータで移動できるソフトロボットヒトデを作成しました。ヒトデは、4本の脚の腱を介して移動します。腱は、脚を曲げたり緩めたりするために使用されるサーボモーターに接続されています。
CSAILのポスドクであるJosephineHughesは、博士課程の学生であるTao Duと一緒に、ヒトデについて次のように述べています。ロボットが安定した地形を歩いているときよりもはるかに複雑であるため、制御システムの作成が非常に困難になります。
「しかし、このシミュレーターを使用すると、通常は数日または数週間かかる可能性のあるプロセスが、わずか数時間で発生する可能性があります。」
デュは、チームがヒトデのデザインを選んだのは、その動きがシンプルで優雅であり、脚を絞ったり離したりすることで前方への動きが生まれたためだと言います。
ただし、チームはシミュレーターがさまざまな体型で機能することを発見したため、次に、ウミガメ、マンタ、サメに触発された、関節、ひれ、足ひれなどのより複雑な構造を含むデザインを調査します。
このグループのツールには、ロボットの制御メカニズムの初期シミュレーションと設計を行う機械学習モデルが含まれ、その後、ロボットは迅速に製造されます。
次に、ロボットを使った実際の実験を使用して、より多くのデータを取得し、ロボットの設計を繰り返し改善および最適化します。その結果、ロボットは通常、もう一度再製造するだけで済みます。 (シミュレーションツールの開発に関する別の論文が現在検討中です。)
「ロボットシミュレーションを行うときは、定義上、シミュレーションと現実の間にギャップを作る近似を行う必要があります」と、研究に関与しなかったシンガポール国立大学の制御およびメカトロニクスの教授であるセシリア・ラスキは言います。
「この作業は、シミュレーションと実際の実験の混合ループで非常に効果的な現実のギャップを減らすことを目的としています。」
ヒトデの体には、その弾性特性、自然な浮力、および迅速かつ簡単に製造できる能力のために、チームはシリコーンフォームを使用しました。実験では、ヒトデは手作りのコントローラーを使用する場合よりも4倍速く水中を移動できることがわかりました。人間の専門家による。
確かに、ヒューズは、シミュレーターが人間が自分で考えていなかったであろう制御戦略を採用しているように見えることをチームが発見したと言います。
「ロボットのヒトデを使って、彼らが行う非常に目に見える脚の推進力に加えて、彼らに重要な勢いを与えることができるいくつかの微妙な高周波の動きがあることを学びました」とヒューズは言います。
このプロジェクトは、ソフトロボットに焦点を当てた一連のCSAILプロジェクトから構築されています。これは、リジッドボディのロボットよりも安全で頑丈で機敏な可能性があるとRus氏は言います。
研究者は、狭い場所を移動する必要がある環境向けのソフトロボットにますます注目しています。そのようなロボットは、衝突から回復できるという点でより弾力性があるからです。
ラスキ氏によると、チームのツールを使用して、深海のさまざまな場所でデータを測定するロボットを開発したり、研究者がまだ考えていなかった新しい方法で移動できるロボットを一般的に想定したりすることができます。
「ヒトデロボットやSoFiのような生物に触発されたロボットは、海洋生物を邪魔することなく近づけることができます」とRus氏は言います。 「将来的には、生物に着想を得たロボット機器を迅速に設計および構築することで、荒野に配備して生命を観察できるカスタム観測所を作成できるようになります。」
DuとHughesは、Matusik、Rus、およびMITの学部生であるSebastienWahと共同で論文を執筆しました。この論文は今週、Journal of Robotics Automation Lettersに掲載され、来月にはIEEEのソフトロボティクス国際会議(RoboSoft)でも発表される予定です。
自動制御システム