


Arduino Nano:ジョイスティックで2つのステッピングモーターを制御
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
アプリとオンラインサービス
>  |
| |||
 |
|
このプロジェクトについて
Arduino を構築する場合 ステッピングモーターを使用したプロジェクト 、 CNC など マシン、プロッタ 、またはアニメーションアート 、ステッパーを手動で制御する必要がある瞬間があります。アナログジョイスティック 可変速度の手動制御用の安価で簡単なモジュールです。 ステッパーを制御するのに適しているようです。 。従来の Arduino で問題を解決する ただし、コードは簡単ではありません。
このチュートリアルでは、 Arduino Nano のプログラミングがいかに簡単かを紹介します。 Visuino 2つのステッピングモーターを制御する ジョイスティックを使用 。
ステップ1:コンポーネント <図>
 <図>
<図> 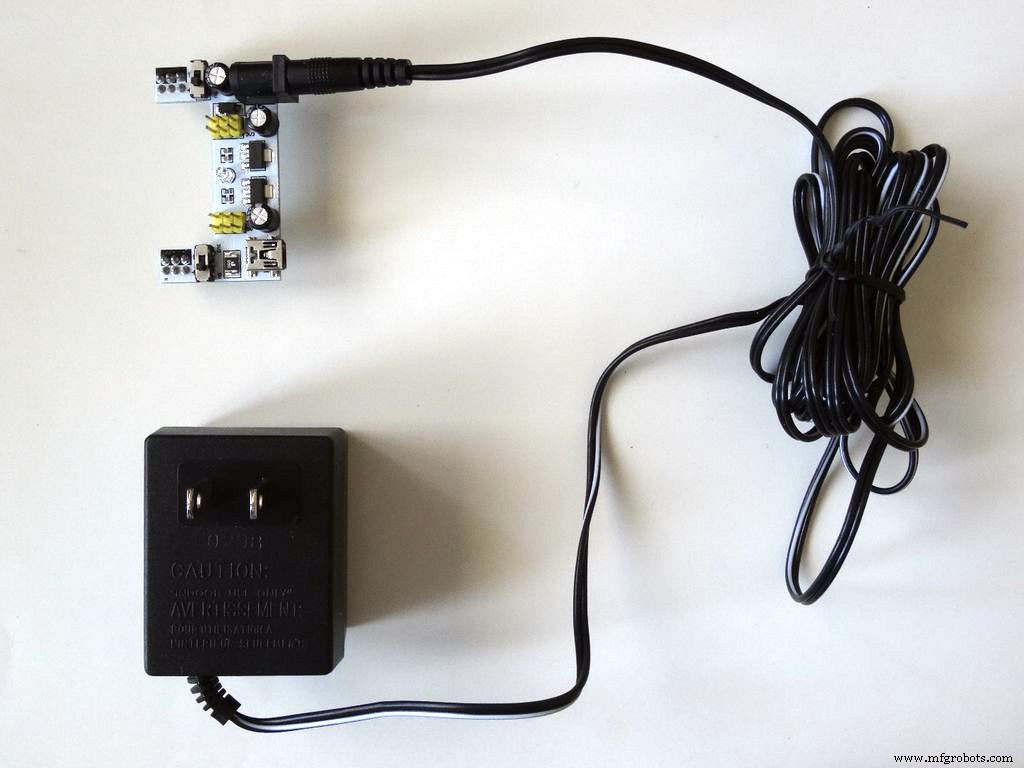
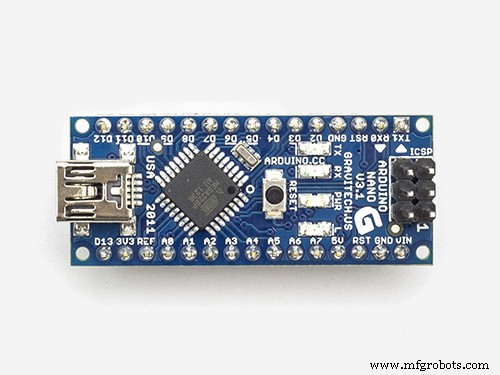
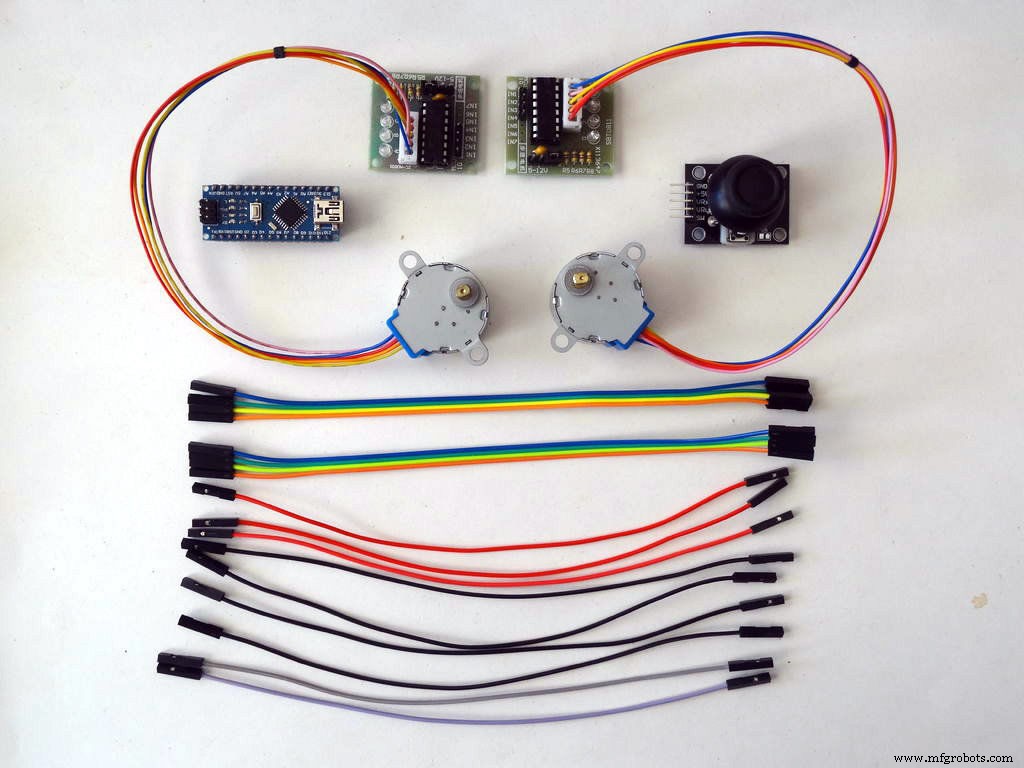
- 1つの Arduino 互換性のあるボード(Arduino Nanoを使用しているので使用していますが、他のボードでも問題ありません)
- 1つのジョイスティック この安価な37個のセンサーセットから得たもの
- 2つの 5Vステッピングモーター ドライバーボード (私はULN2003ドライバーボードで28BYJ-48ステッパーを使用しました)
- 1つの K2ブレッドボード電源 アダプター付き(写真2 )、またはステッパー用の他の5V電源
- 17女性-女性 ジャンパー線
ステップ2:電源を接続し、ステッピングモーターを接地します <図>
 <図>
<図> 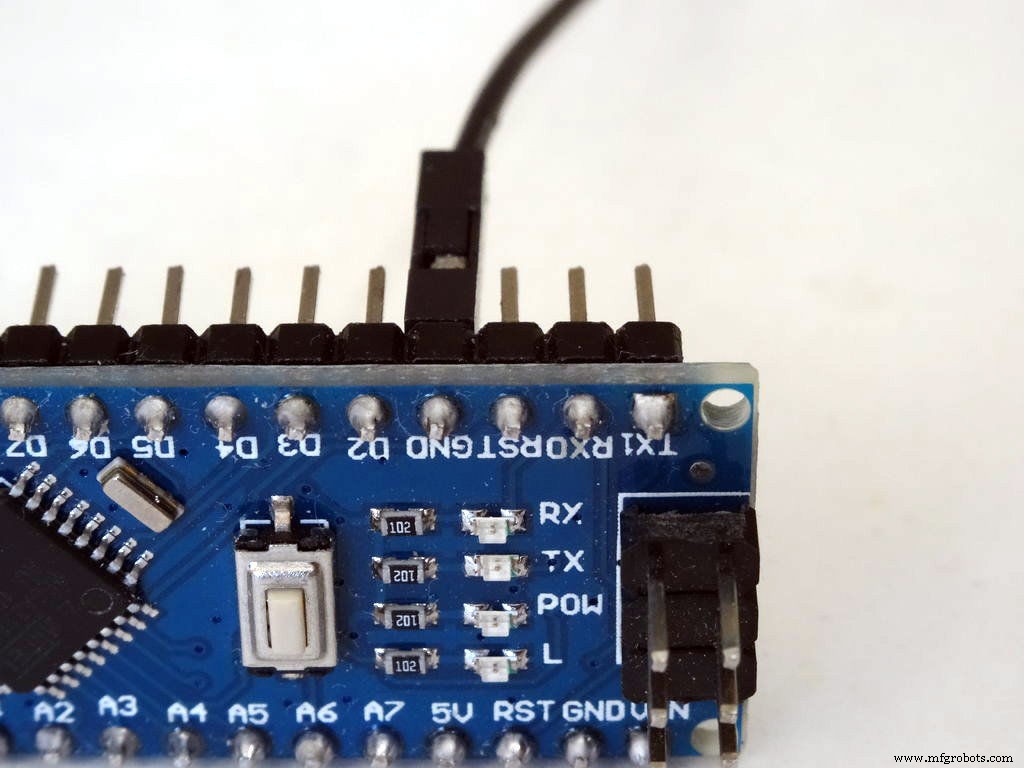 <図>
<図> 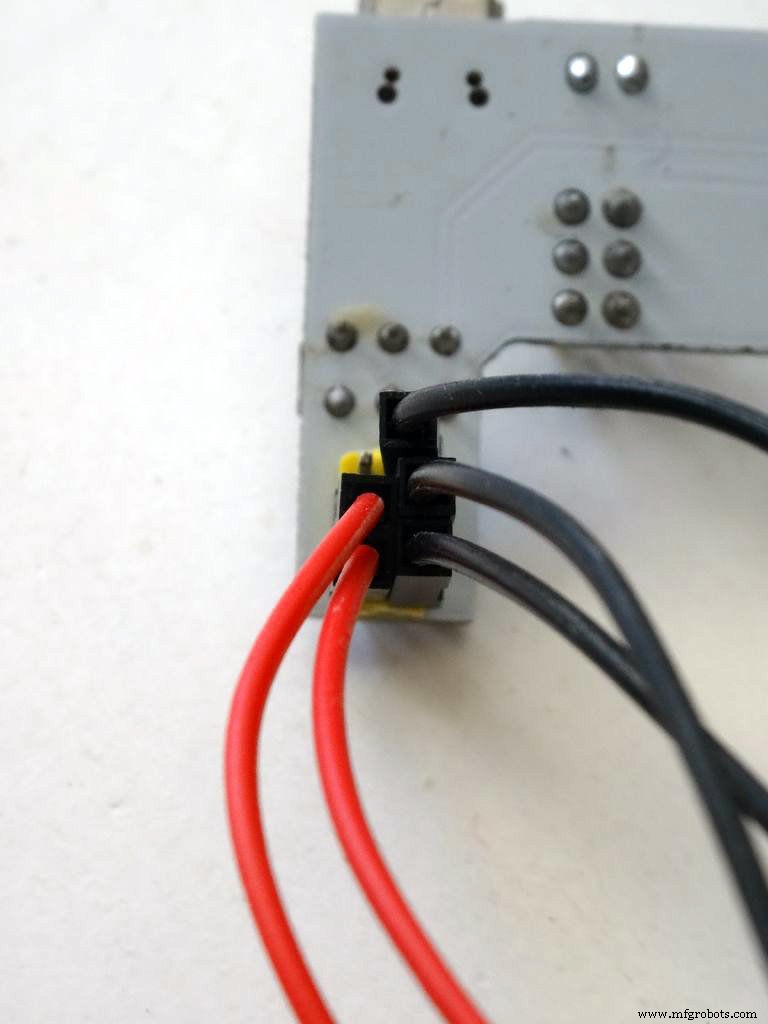 <図>
<図> 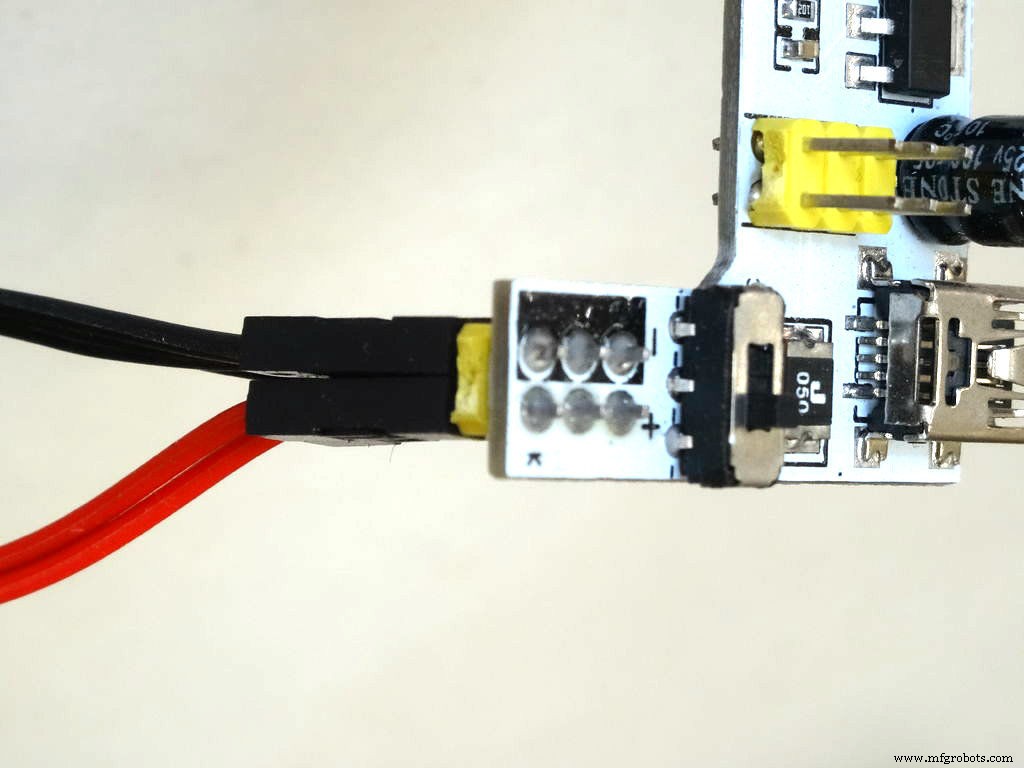 <図>
<図> 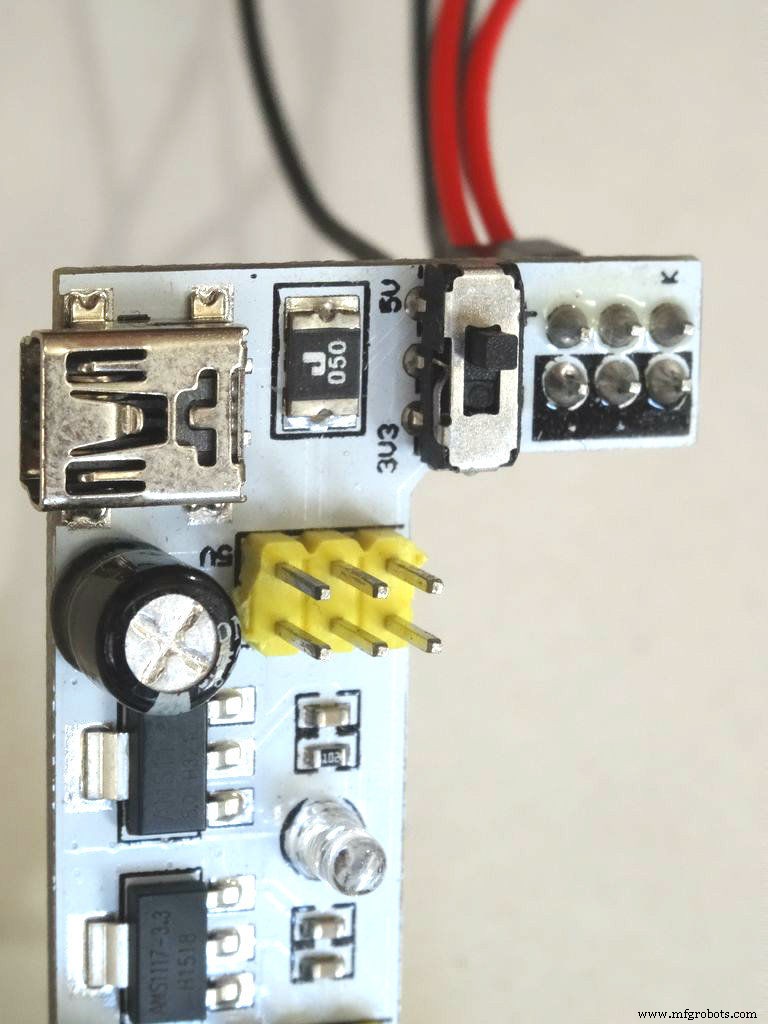 <図>
<図> 
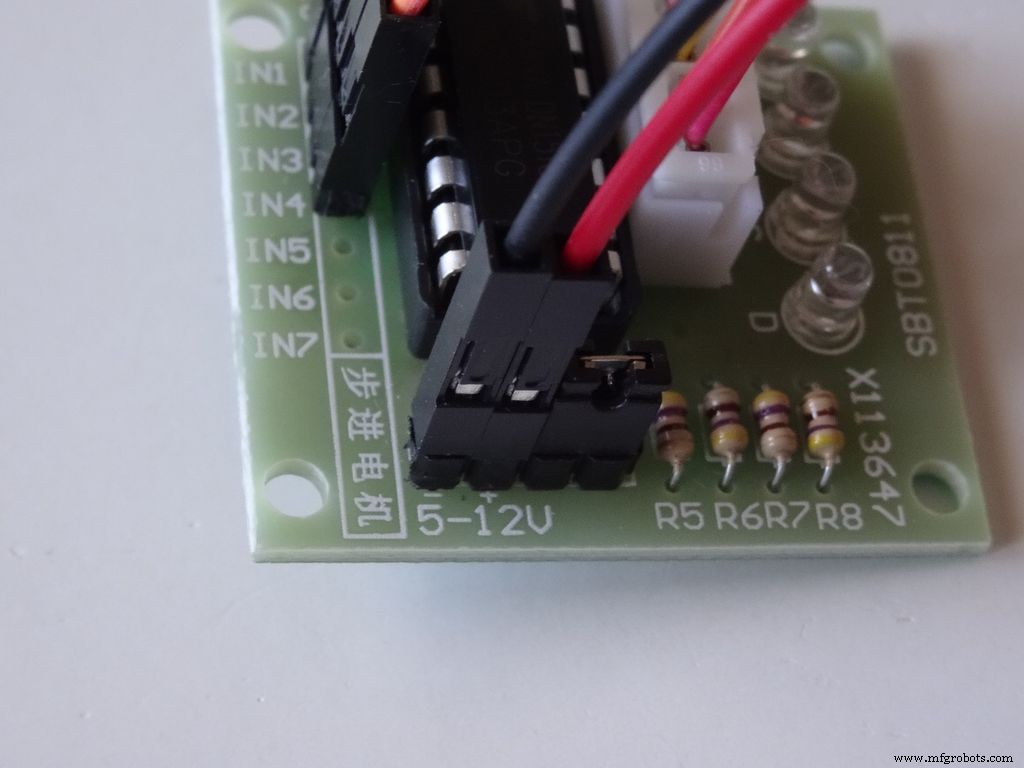
- 接続グラウンド (黒いワイヤー )、およびパワー (赤いワイヤー )、各ステッピングドライバーモジュール (写真1 )
- 別のグラウンドを接続します (黒いワイヤー )からグラウンド Arduino のピン ボード(写真2 )
- 電源のもう一方の端を接続します (赤いワイヤー )モータードライバーモジュールから "" パワーに K2電源のピン (写真3、4 )
- アースのもう一方の端を接続します (黒いワイヤー )モータードライバーモジュール、および Arduino 「- "グラウンド K2電源のピン (写真3、4 )
- 電源選択のスイッチを確認してください K2電源の 5V に設定されています (写真5 )
- 写真6 グラウンドがどこにあるかを示します Arduino Nano のピン
ステップ3:ステッピングモーターをArduinoに接続する <図>
 <図>
<図> 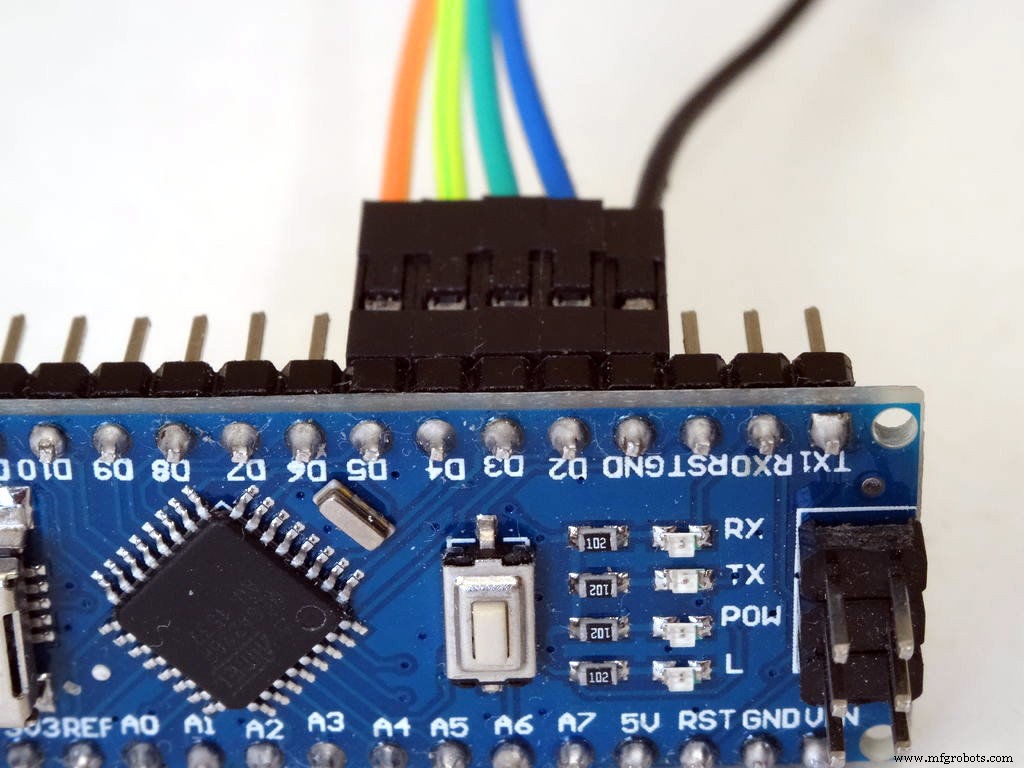 <図>
<図> 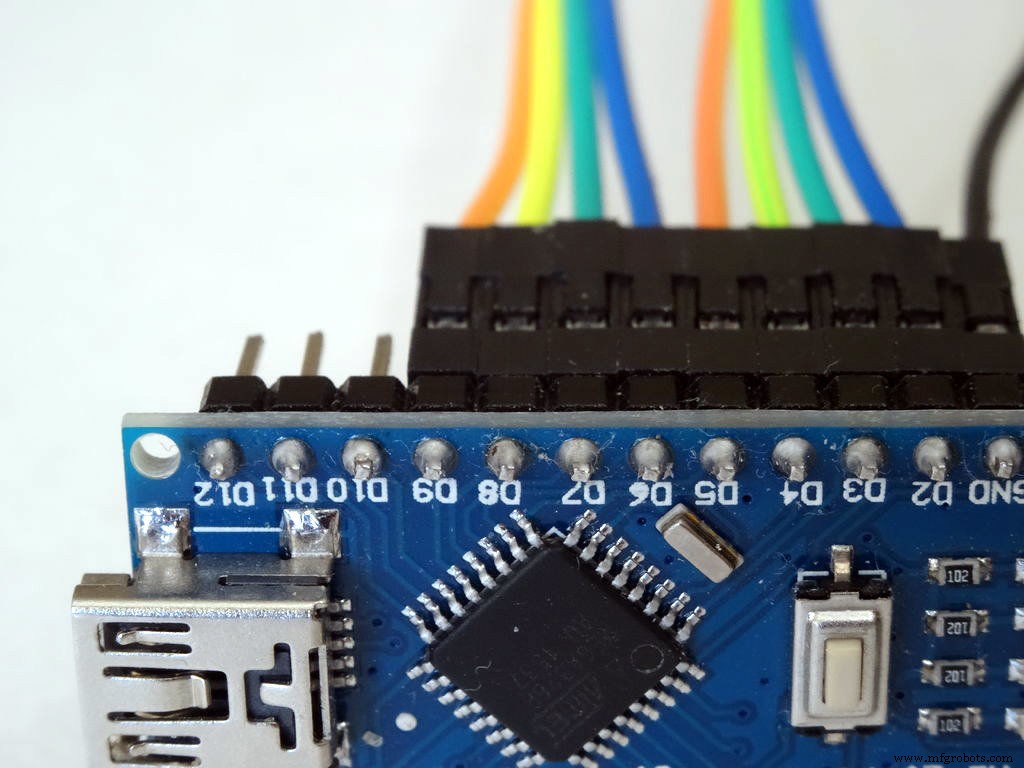 <図>
<図> 
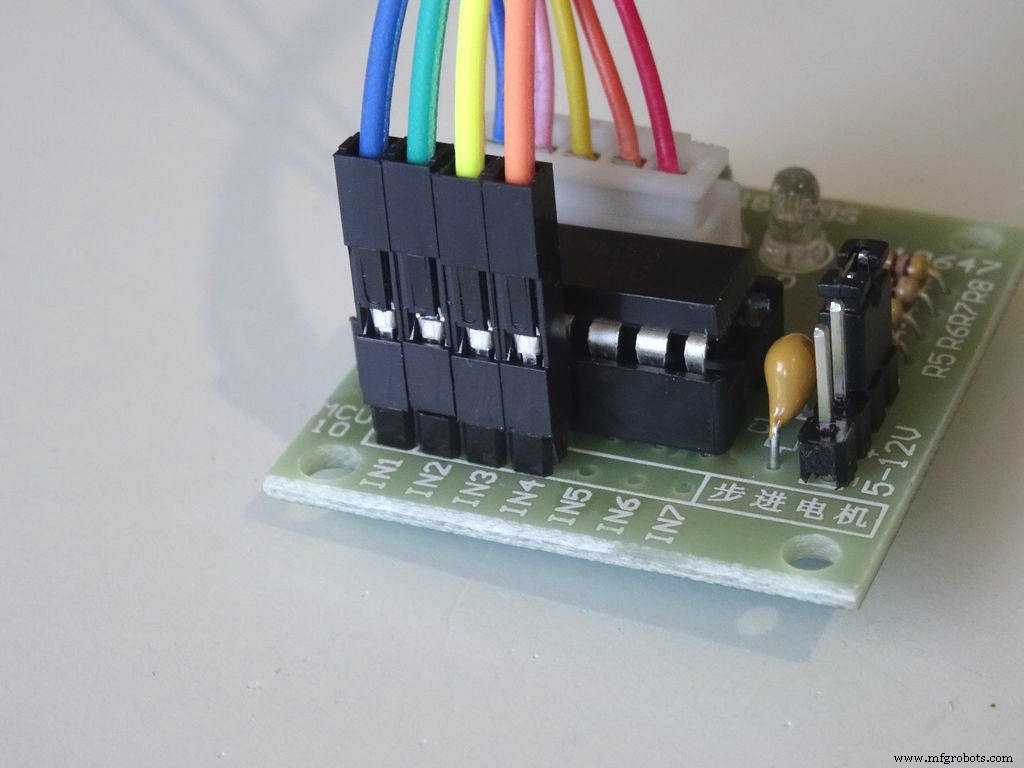
- まだ接続されていない場合は、ステッピングモーターコネクタをドライバボードに接続します
- メス-メスジャンパー線の一端を接続します (青、緑、黄、オレンジのワイヤー ) IN1からIN4ピンへ ステッピングドライバーの ファーストモーターの場合 (写真1 )
- メス-メスジャンパー線の一端を接続します (青、緑、黄、オレンジのワイヤー ) IN1からIN4ピンへ ステッピングドライバーの セカンドモーター用 (写真1 )
- IN1ワイヤーを接続します ファーストモーターから (青いワイヤー )デジタルピン2 Arduino の ボード(写真2 )
- IN2ワイヤーを接続します ファーストモーターから (緑色のワイヤー )デジタルピン3 Arduino の ボード(写真2 )
- IN3ワイヤーを接続します ファーストモーターから (黄色のワイヤー )デジタルピン4 Arduino の ボード(写真2 )
- IN4ワイヤーを接続します ファーストモーターから (オレンジ色のワイヤー )デジタルピン5 Arduino の ボード(写真2 )
- IN1ワイヤーを接続します セカンドモーターから (青いワイヤー )デジタルピン6 Arduino の ボード(写真3 )
- IN2ワイヤーを接続します セカンドモーターから (緑色のワイヤー )デジタルピン7 Arduino の ボード(写真3 )
- IN3ワイヤーを接続します セカンドモーターから (黄色のワイヤー )デジタルピン8 Arduino の ボード(写真3 )
- IN4ワイヤーを接続します セカンドモーターから (オレンジ色のワイヤー )デジタルピン9 Arduino の ボード(写真3 )
- 写真4 赤で表示 デジタル2からデジタル9 はどこにありますか ArduinoNanoのピン。青で示されているのは、前の手順で行われた接続です。
ステップ4:ジョイスティックをArduinoに接続する <図>
 <図>
<図> 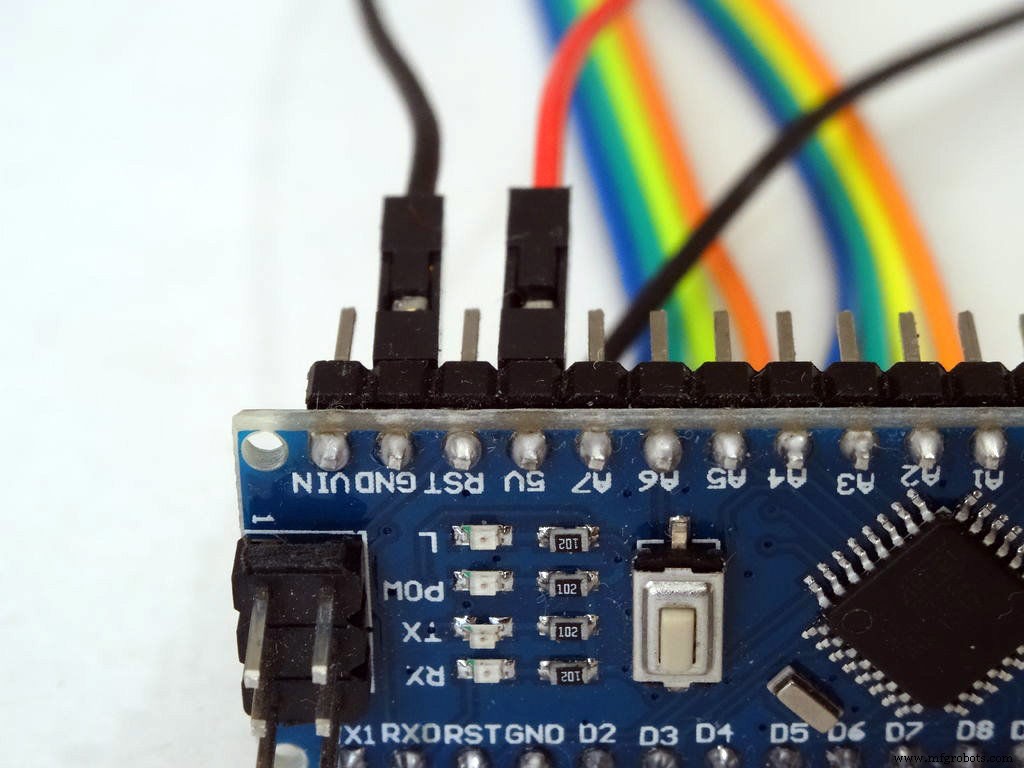 <図>
<図> 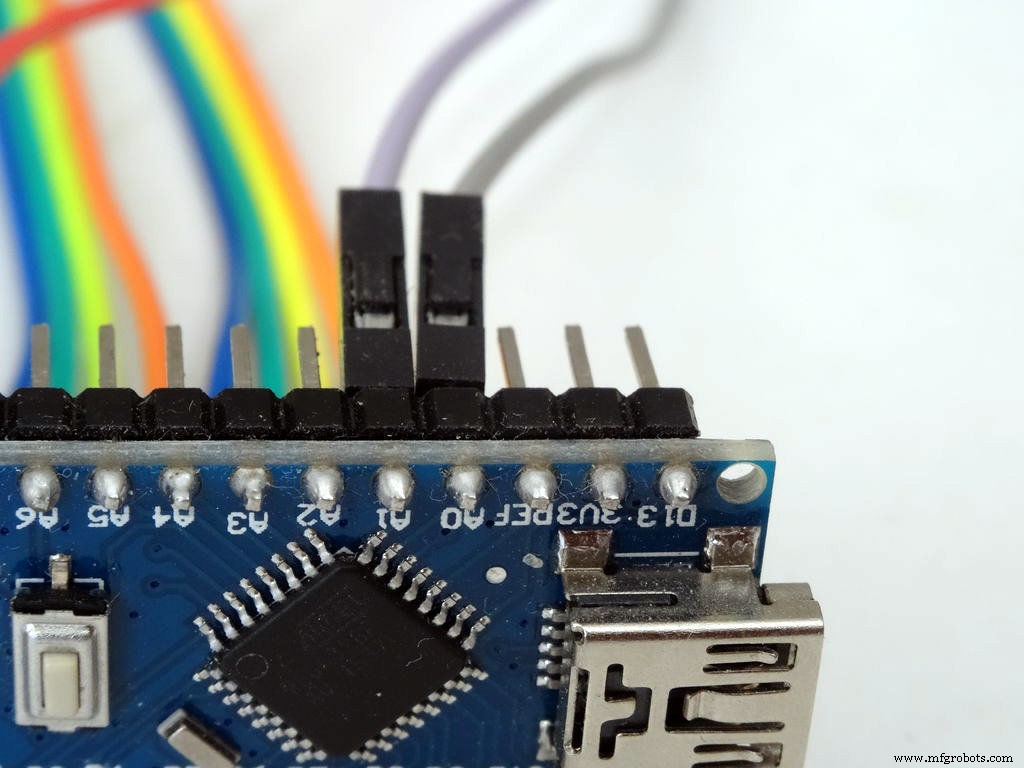 <図>
<図> 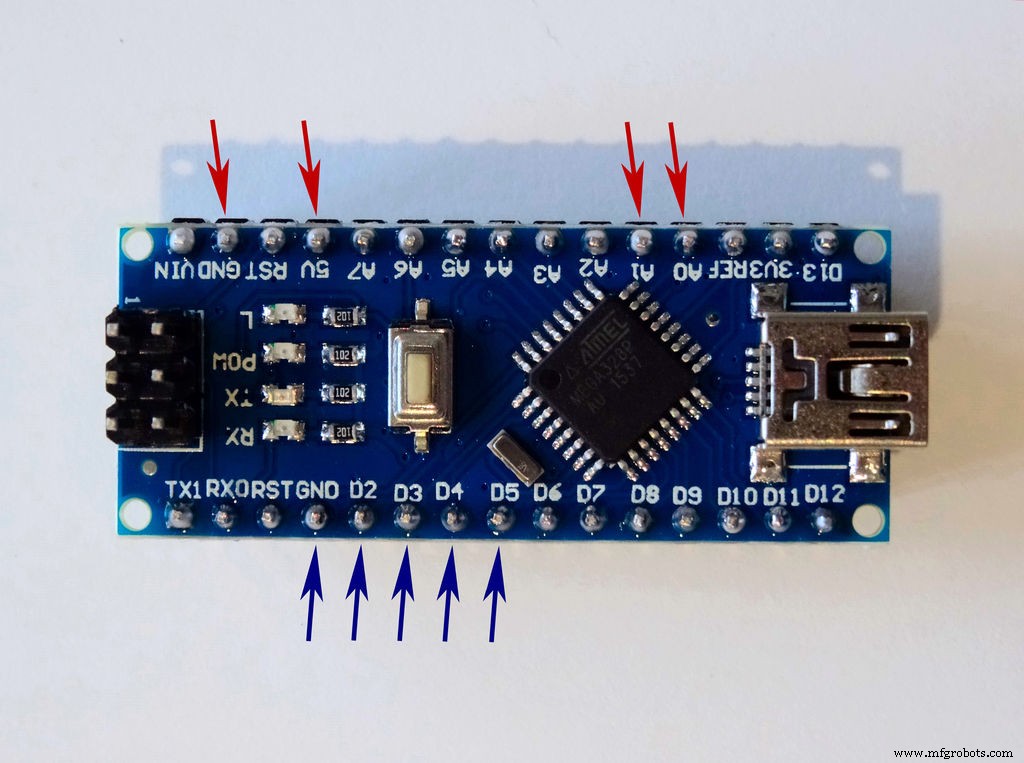
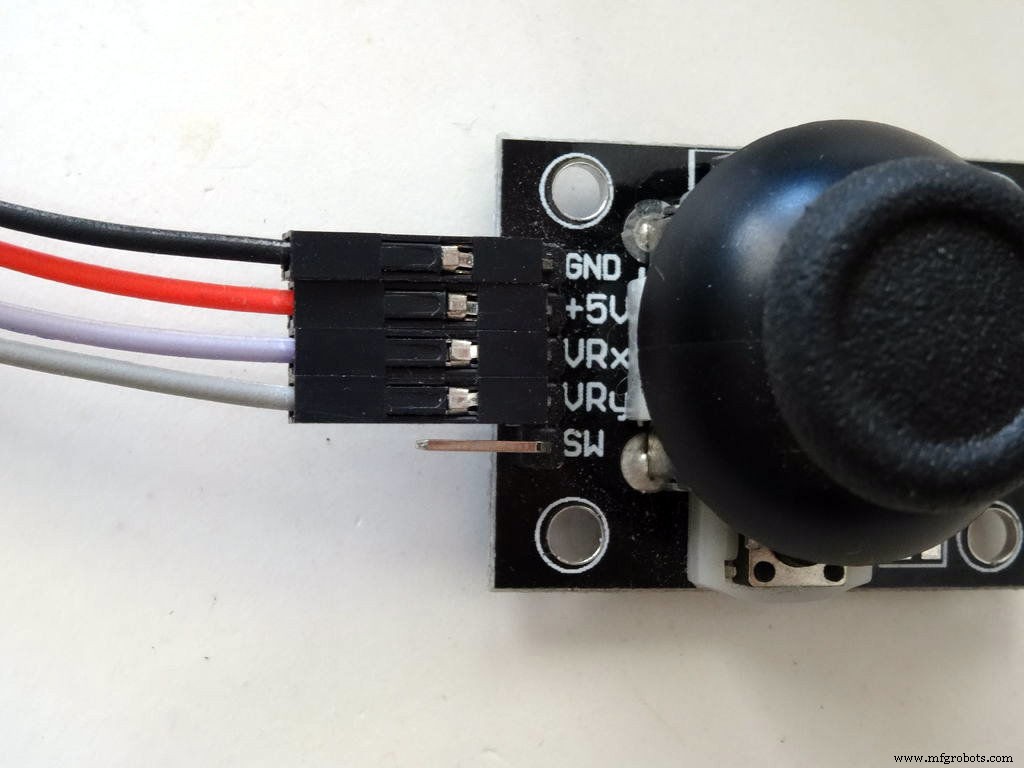
- 接続女性-女性 アースへの配線 (黒いワイヤー )、パワー (赤いワイヤー )、 VRx (紫のワイヤー )、および VRy (灰色のワイヤー )ジョイスティック 写真1 に示すように
- アース線を接続します (黒いワイヤー )グラウンドへ Arduino のピン ボード(写真2 )
- 電源線を接続します (赤いワイヤー ) 5V Arduino の電源ピン (写真2 )
- VRxワイヤーを接続します (茶色のワイヤー )アナログ1 Arduino のピン ボード(写真3 )
- VRyワイヤーを接続します (灰色のワイヤー )アナログ0 Arduino のピン ボード(写真3 )
- 写真4 赤で表示 グラウンドはどこにありますか 、 5V パワー、アナログ0 、およびアナログ1 ArduinoNanoのピン。青で示されているのは、前の手順で行われた接続です。
ステップ5:Visuinoを起動し、Arduinoボードタイプを選択します <図>
 <図>
<図> 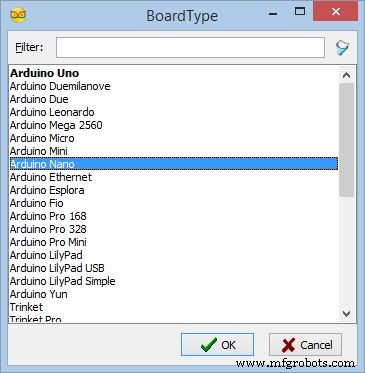
Arduinoのプログラミングを開始するには、 Arduino IDE が必要です。 ここからインストール:http://www.arduino.cc/。
必ず1.6.7以上をインストールしてください。そうしないと、このチュートリアルは機能しません!
Visuino :https://www.visuino.comもインストールする必要があります。
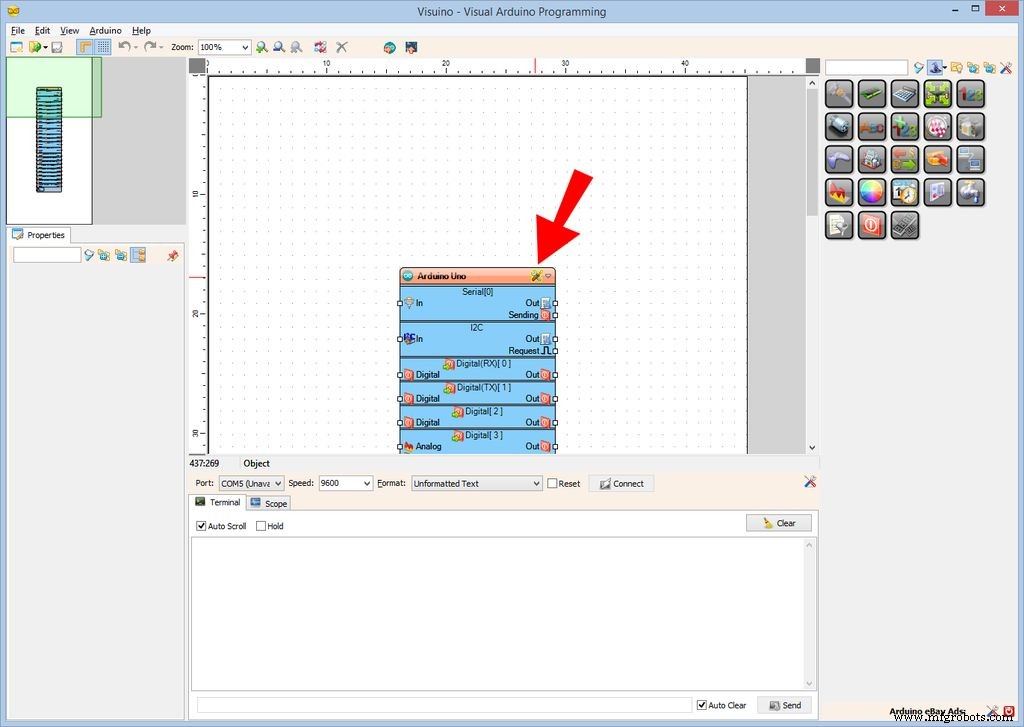
- Visuino を開始します 最初の写真に示すように
- [ツール]をクリックします Arduinoコンポーネントの「」ボタン(写真1 ) Visuino
- ダイアログが表示されたら、 Arduino Nano を選択します 写真2 に示すように
ステップ6:Visuinoの場合:ステッピングモーターコンポーネントを追加して接続します <図>
 <図>
<図>  <図>
<図> 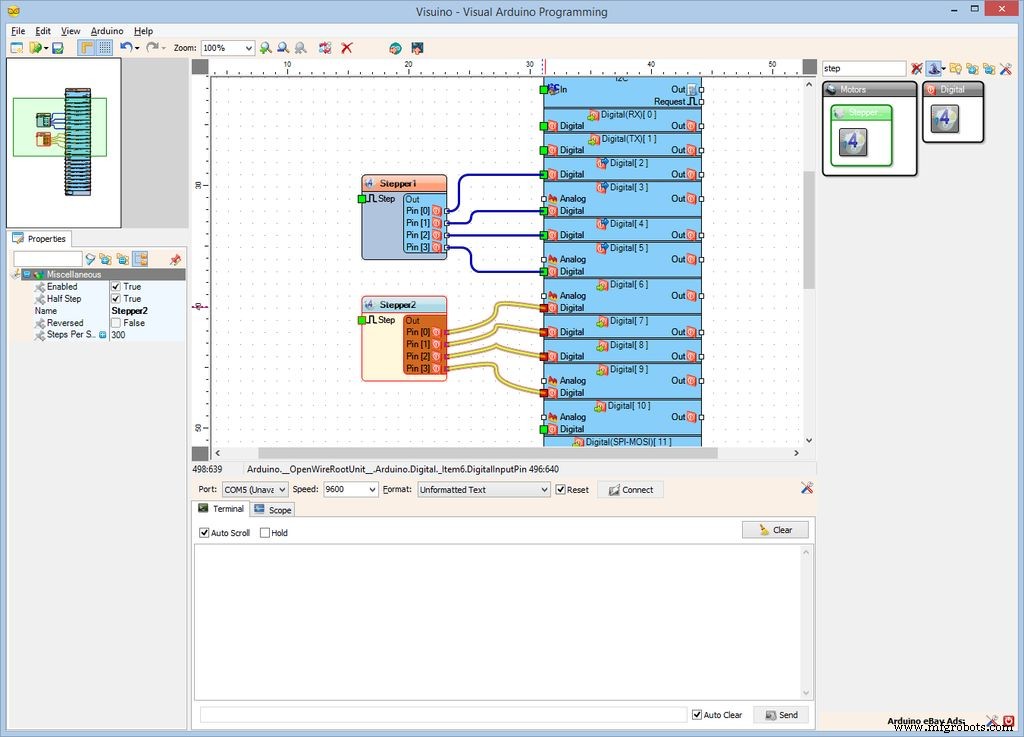
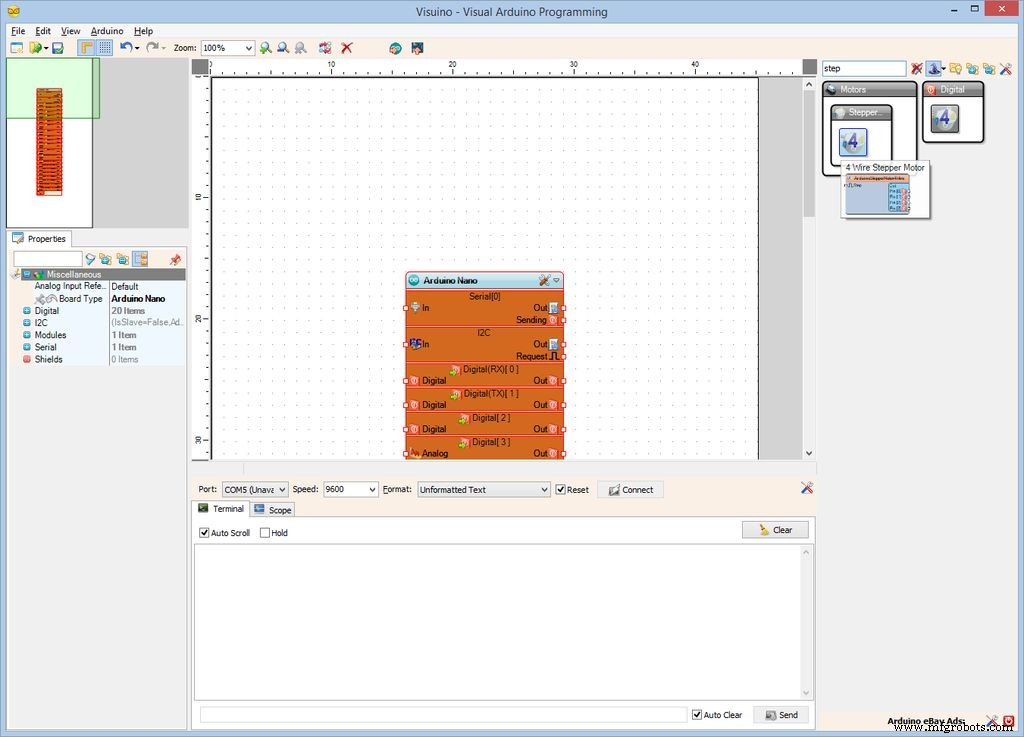
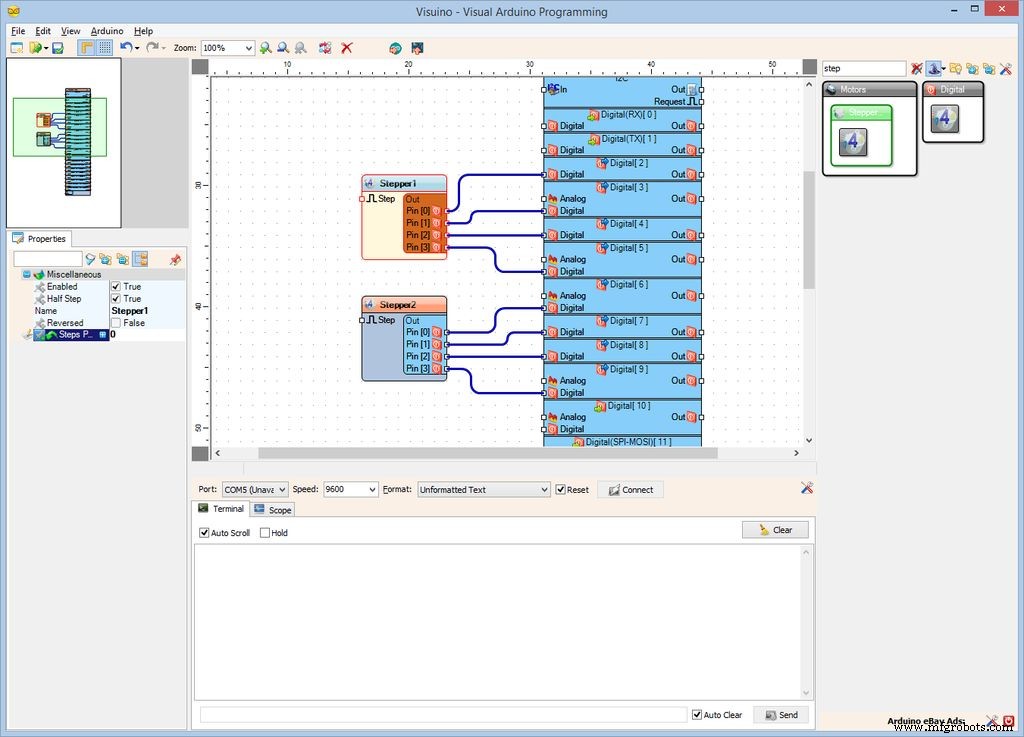
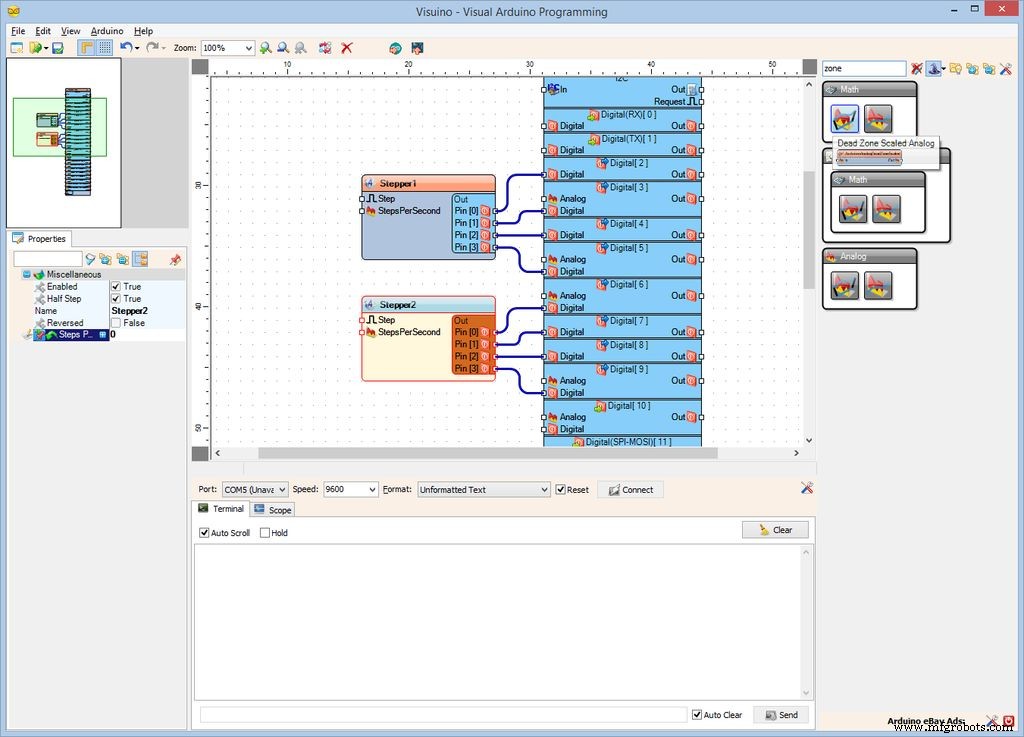
まず、ステッピングモーターを制御するためのコンポーネントを追加する必要があります:
- 「ステップ」と入力します [コンポーネントツールボックス]の[フィルター]ボックスで、[ 4ワイヤーステッピングモーター]を選択します。 "コンポーネント(写真1 )、 2つをドロップします デザインエリアにあります
- [アウト]をクリックします "ボックス ステッパー1 のピンが含まれています すべての出力ピンの接続を一度に開始するコンポーネント(写真2 )
- マウスを「デジタル」の上に移動します 「デジタル[2] の入力ピン " Arduino のチャンネル 成分。 Visuinoは自動的にワイヤーを広げて、残りのピンに正しく接続するようにします(写真2 )
- [アウト]をクリックします "ボックス Stepper2 のピンが含まれています すべての出力ピンの接続を一度に開始するコンポーネント(写真3 )
- マウスを「デジタル」の上に移動します 「デジタル[6] の入力ピン " Arduino のチャンネル 成分。 Visuinoは自動的にワイヤーを広げて、残りのピンに正しく接続するようにします(写真3 )
ステップ7:Visuinoの場合:ステッピングモーターコンポーネントのプロパティを設定し、ピンを追加して速度を制御します <図>
 <図>
<図> 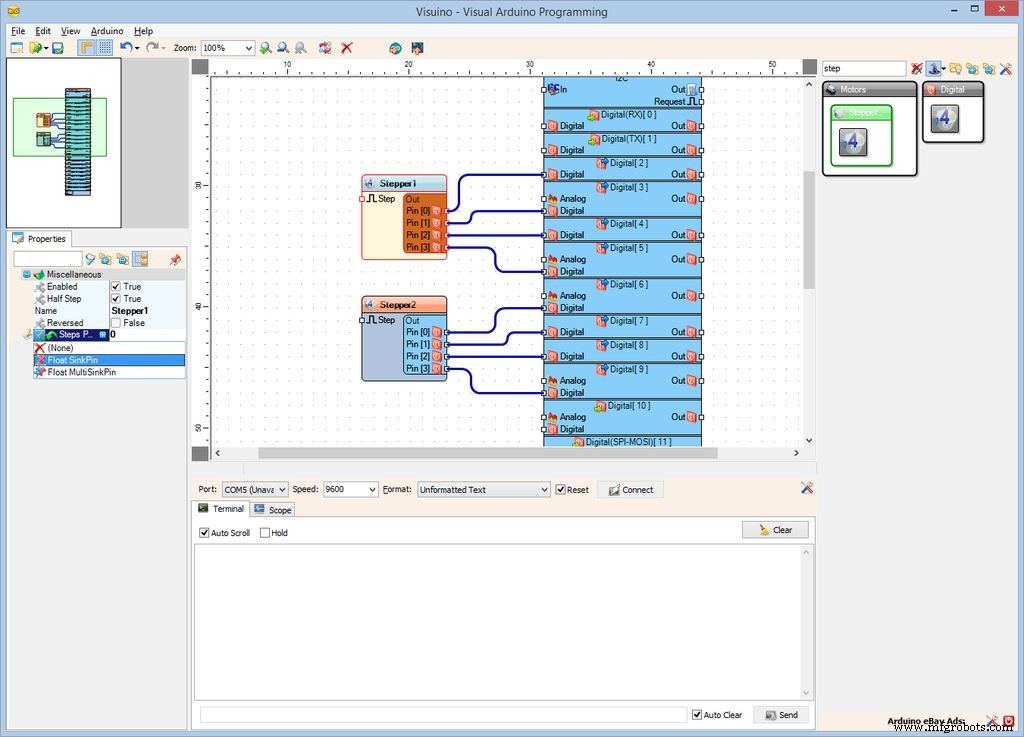 <図>
<図> 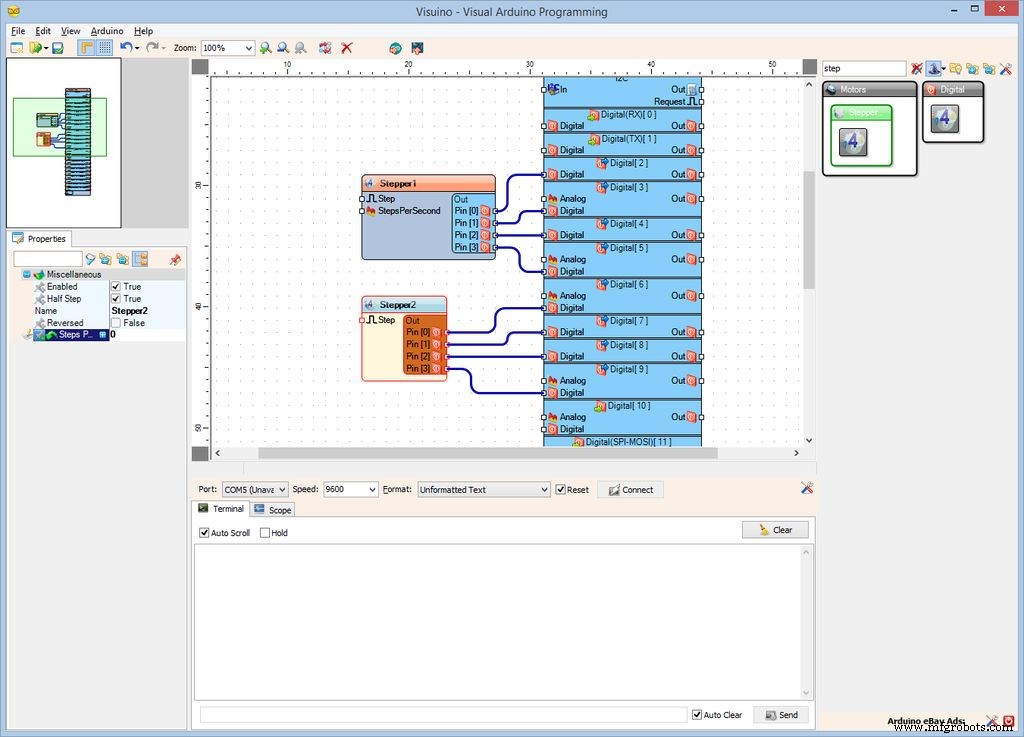 <図>
<図> 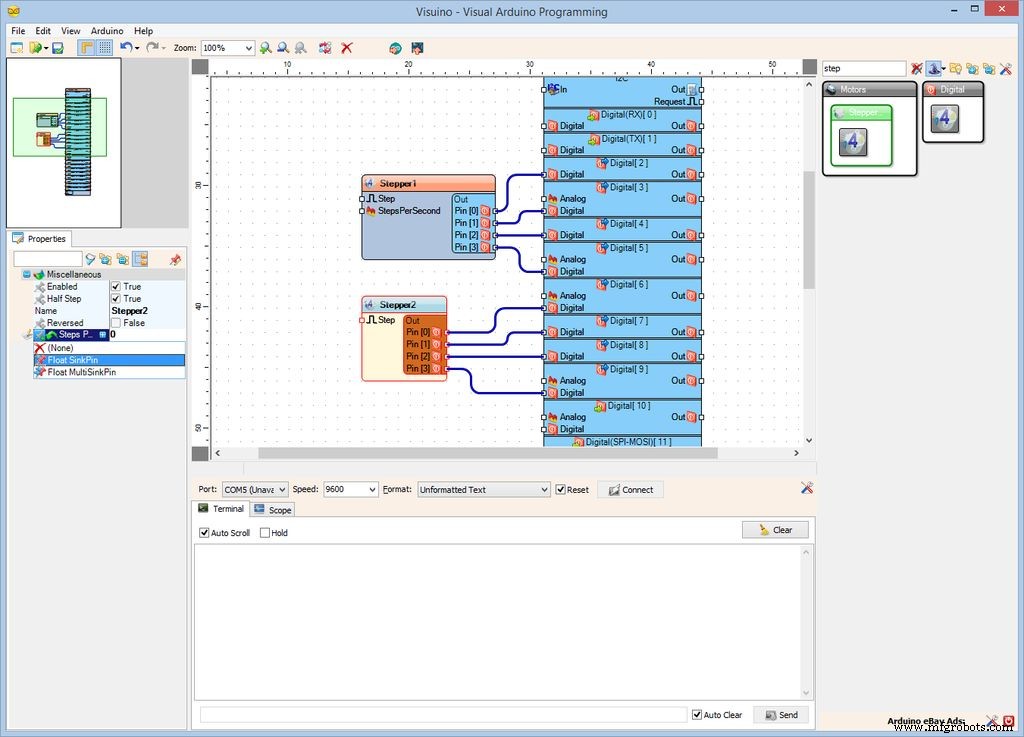
ステッパーの速度を制御したいので、「StepsPerSecond」プロパティにピンを追加する必要があります。
- Stepper1 を選択します コンポーネント(写真1 )
- オブジェクトインスペクターで、「 1秒あたりのステップ数」の値を設定します "プロパティから" 0 "(写真1 )
- オブジェクトインスペクターでピンをクリックします [ 1秒あたりのステップ数]の前にあるボタン [プロパティ]をクリックし、[ Float SinkPin ]を選択します "(写真2 )
- Stepper2 を選択します コンポーネント(写真3 )
- オブジェクトインスペクターで、「 1秒あたりのステップ数」の値を設定します "プロパティから" 0 "(写真3 )
- オブジェクトインスペクターでピンをクリックします [ 1秒あたりのステップ数]の前にあるボタン [プロパティ]をクリックし、[ Float SinkPin ]を選択します "(写真4 )
ステップ8:Visuinoの場合:デッドゾーンスケーリングされたアナログコンポーネントを追加して接続します <図>
 <図>
<図> 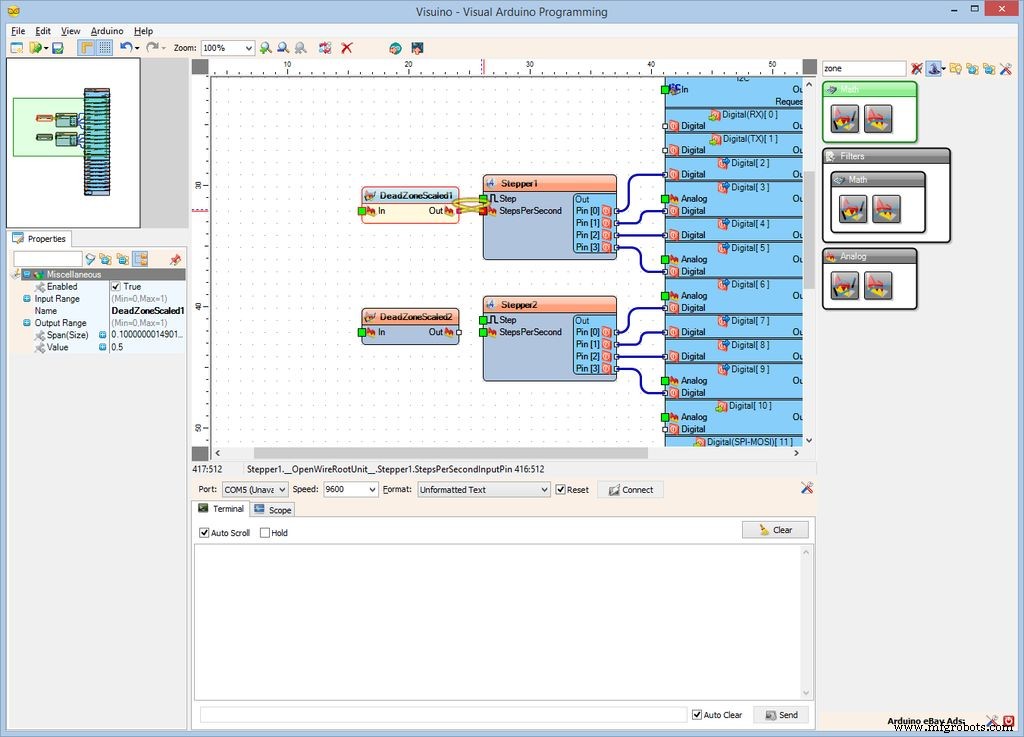 <図>
<図> 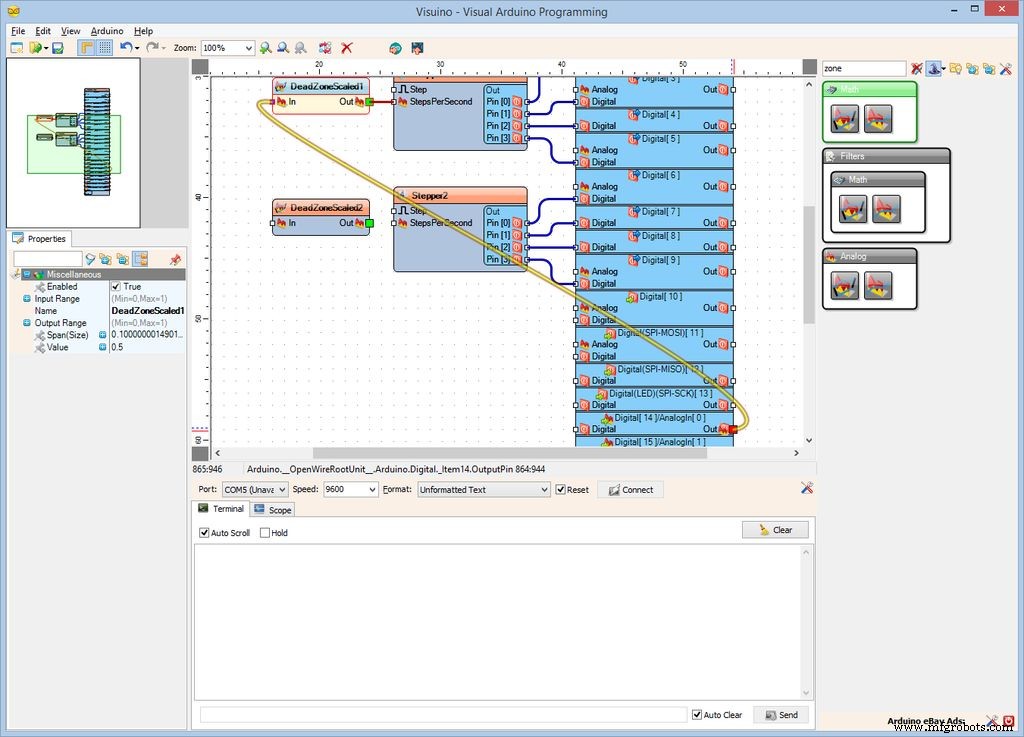 <図>
<図> 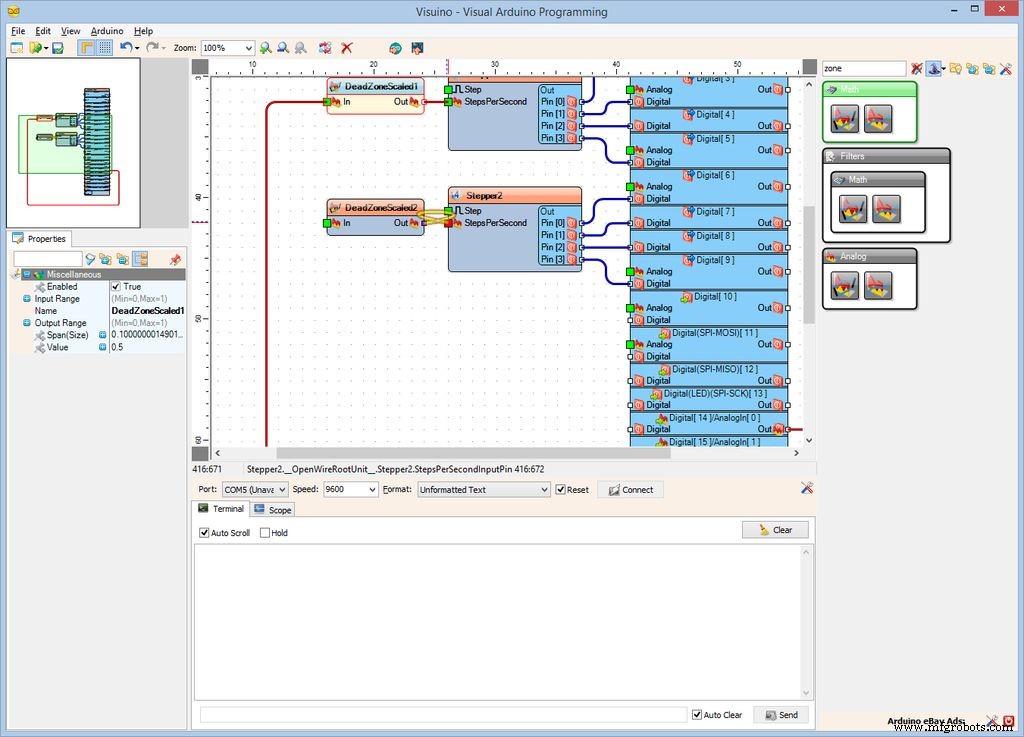 <図>
<図> 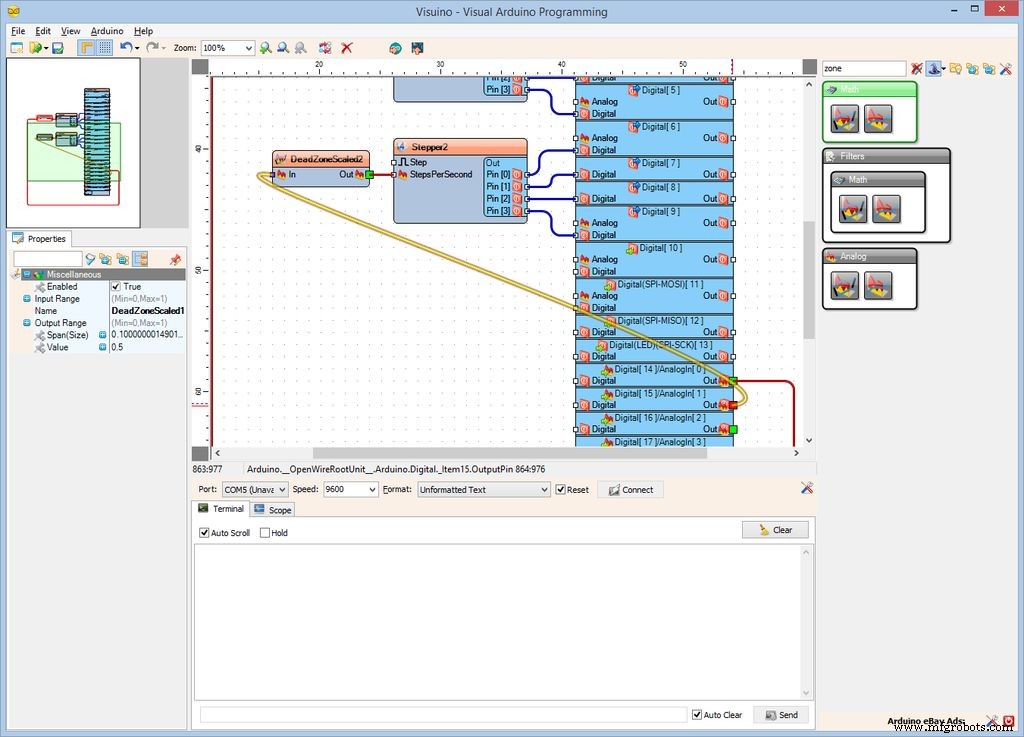
ジョイスティックが接続されているアナログピンは、0.0〜1.0の正規化された値を生成します。それらを毎秒+/- 300ステップに変換する必要があります。ジョイスティックは解放された中心位置ではあまり正確ではないため、中心の周りの小さなゾーンを0.5と見なし、「デッドゾーン」を導入する必要があります。
- 「ゾーン」と入力します [コンポーネントツールボックス]の[フィルター]ボックスで、[デッドゾーンスケーリングアナログ]を選択します。 "コンポーネント(写真1 )、 2つをドロップします デザインエリアにあります
- 「アウト」を接続します " DeadZoneScaled1 の出力ピン 「 StepsPerSecond 」のコンポーネント "ステッパー1 の入力ピン コンポーネント(写真2 )
- 「アウト」を接続します 「デジタル[14] / アナログ[0] の出力ピン " Arduino のチャンネル 「 In 」のコンポーネント " DeadZoneScaled1 の入力ピン コンポーネント(写真3 )
- 「アウト」を接続します " DeadZoneScaled2 の出力ピン 「 StepsPerSecond 」のコンポーネント "ステッパー2 の入力ピン コンポーネント(写真4 )
- 「アウト」を接続します 「デジタル[15] / アナログ[1] の出力ピン " Arduino のチャンネル 「 In 」のコンポーネント " DeadZoneScaled2 の入力ピン コンポーネント(写真5 )
ステップ9:Visuinoの場合:デッドゾーンスケーリングされたアナログコンポーネントのプロパティを設定します <図>
 <図>
<図> 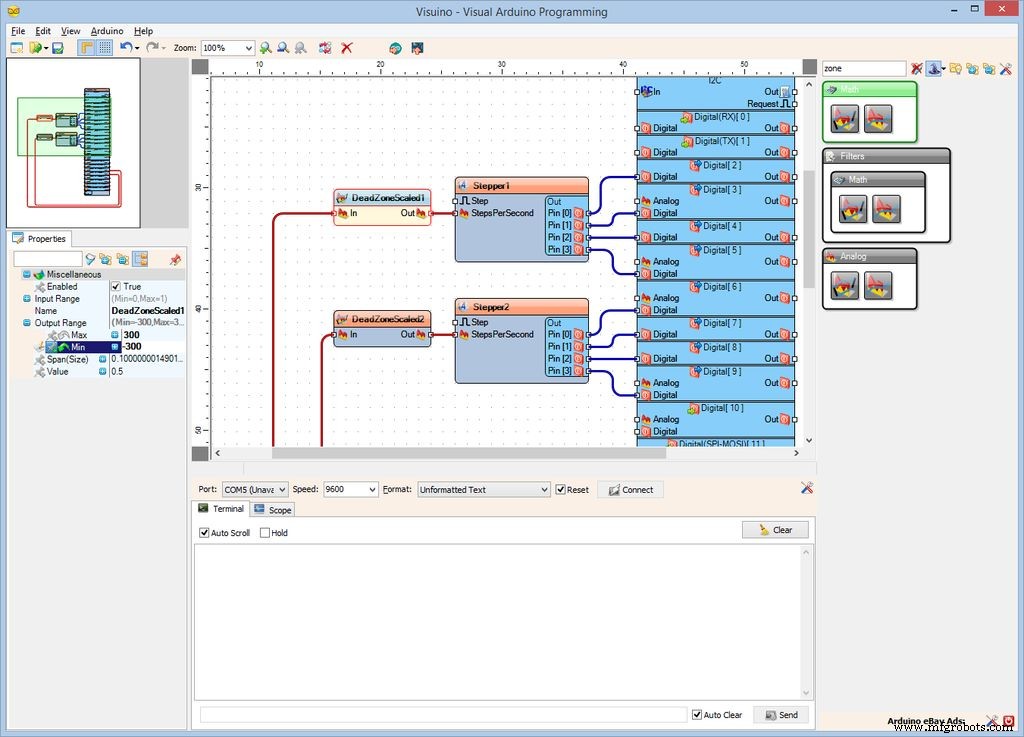 <図>
<図> 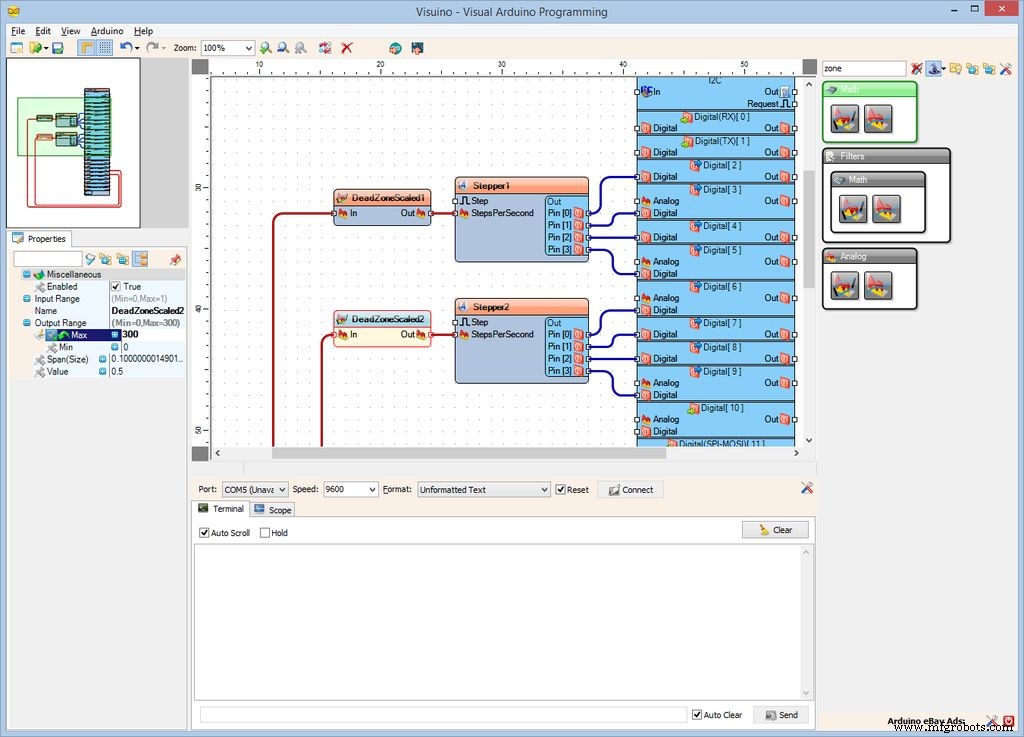 <図>
<図> 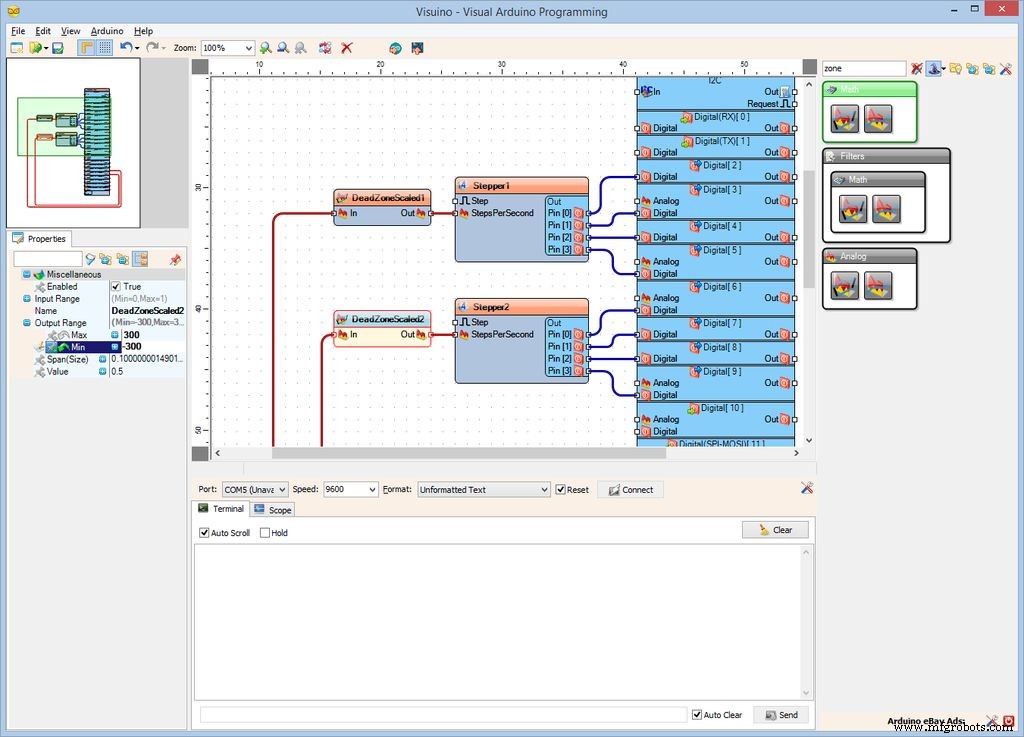
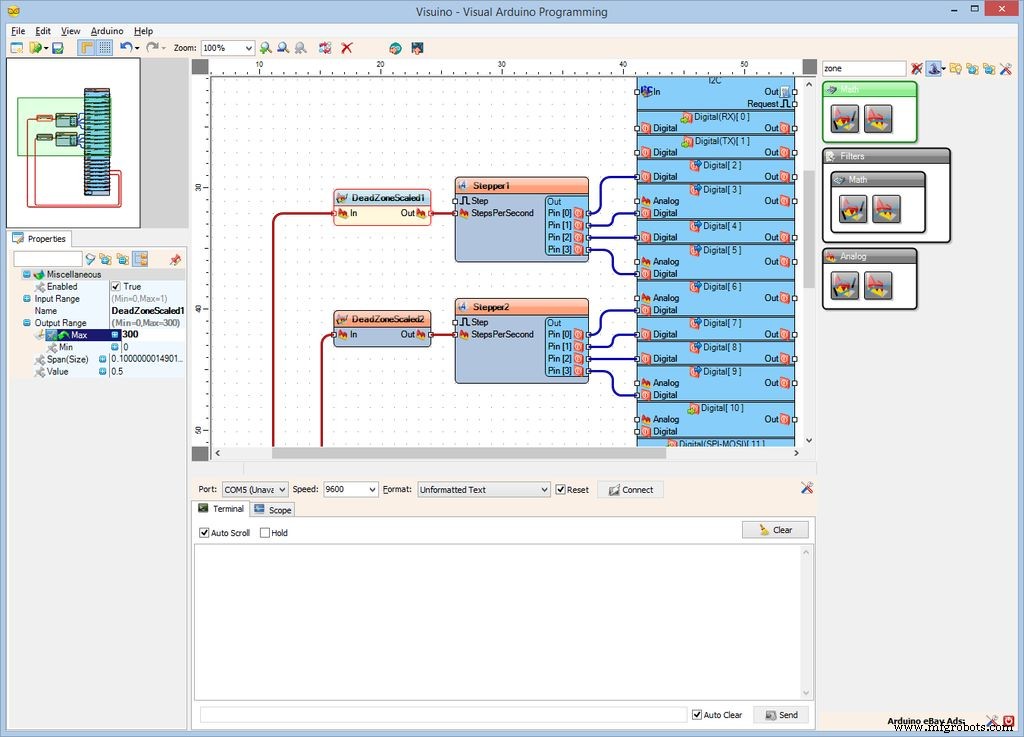
- デザインエリアで、 DeadZoneScaled1 を選択します コンポーネント(写真1 )
- オブジェクトインスペクタで、[出力範囲]を展開します "プロパティ(写真1 )
- オブジェクトインスペクターで、「最大」の値を設定します 「出力範囲のサブプロパティ "プロパティから" 300 "(写真1 )
- オブジェクトインスペクターで、「最小」の値を設定します 「出力範囲のサブプロパティ "プロパティから" -300 "(写真2 )
- デザインエリアで、 DeadZoneScaled2 を選択します コンポーネント(写真3 )
- オブジェクトインスペクタで、[出力範囲]を展開します "プロパティ(写真3 )
- オブジェクトインスペクターで、「最大」の値を設定します 「出力範囲のサブプロパティ "プロパティから" 300 "(写真3 )
- オブジェクトインスペクターで、「最小」の値を設定します 「出力範囲のサブプロパティ "プロパティから" -300 "(写真4 )
ステップ10:Arduinoコードを生成、コンパイル、アップロードする <図>
 <図>
<図> 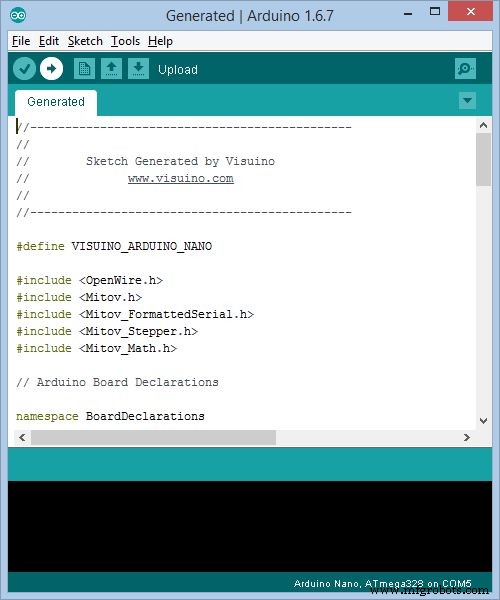
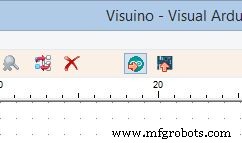
- Visuino 、 F9 を押します または、写真1 に表示されているボタンをクリックします Arduinoコードを生成し、ArduinoIDEを開きます
- Arduino IDE 、アップロードをクリックします ボタンをクリックして、コードをコンパイルしてアップロードします(写真2 )
ステップ11:そしてプレイ... <図>
 <図>
<図> 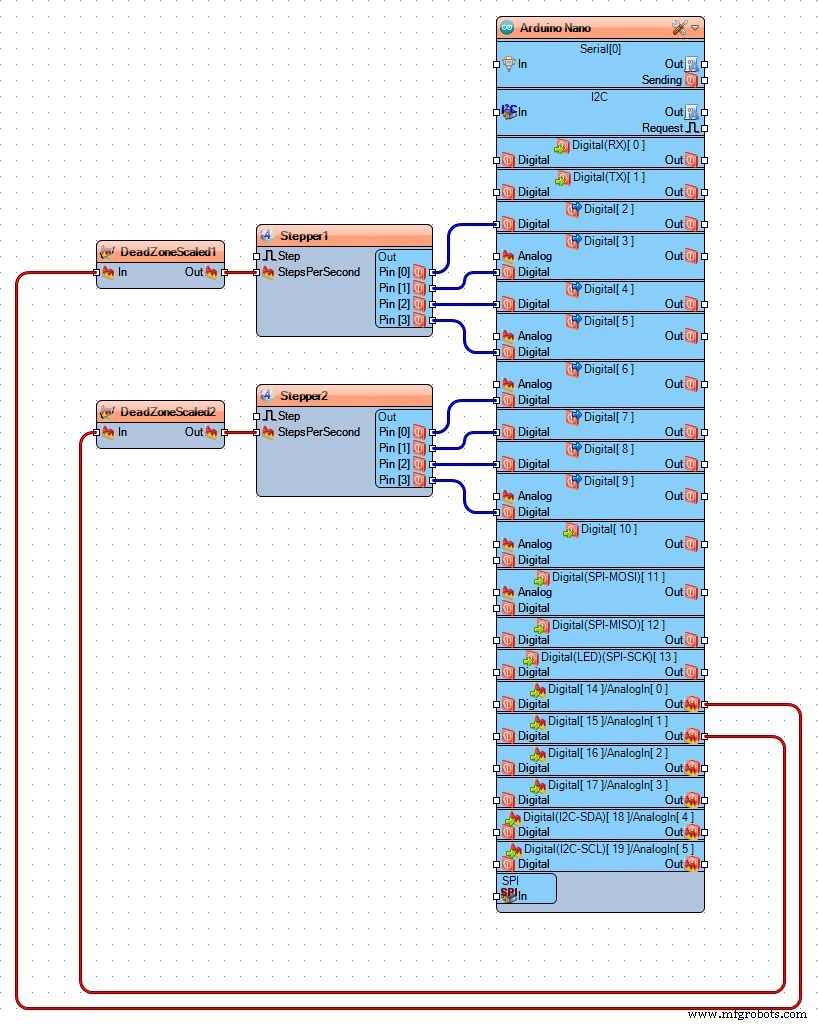
おめでとうございます! プロジェクトが完了しました。
写真1 とビデオ 接続され、電源が入っているプロジェクトを表示します。
ステッパーを制御できます ジョイスティックを使用 ビデオで見られるように 。 ジョイスティックを上に移動 およびダウン 転送を制御します および後方 ステッパーの1つの回転 。 ジョイスティックを左に移動 および右 他のステッパーを制御します 。
写真2 完全な Visuino を見ることができます 図。
Visuino も添付されています このチュートリアル用に作成したプロジェクト。ダウンロードして Visuino で開くことができます :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
製造プロセス