


ケーススタディ:Kane Robotics が RoboDK で軌道研磨を達成した方法
ロボットによる表面仕上げ — これまで考えたこともなかったアプリケーションです。
ロボットでサンディングや研磨を行うのに適したエンド エフェクタはありますか?また、このようなエンド エフェクタを備えたロボットのプログラミングはどのくらい簡単ですか?
しかし、Kane Robotics のチームは、ロボットと新しいオービタル サンディング エンド エフェクターを RoboDK と簡単に統合する方法を見つけました。
彼らのやり方を見てみましょう!
やすりがけと研磨は、従来、自動化が困難なタイプの作業です。以前は、自動研磨機 (ワークショップのスペースの半分を占有し、少額の費用がかかるタイプ) に多額の投資を行うか、手作業で作業を行う必要がありました。
手作業による表面仕上げの問題は、時間がかかり、物理的に大変な作業であり、一貫性のない品質が得られることです。ロボットにとって完璧なタスクのようですね!
近年、産業用ロボットによる表面仕上げが現実的な選択肢になりつつあります。力センサーをロボットのエンド エフェクターに追加することにより、力制御を使用して、オービタル サンディング ツールで一貫した表面仕上げを行うことができます。
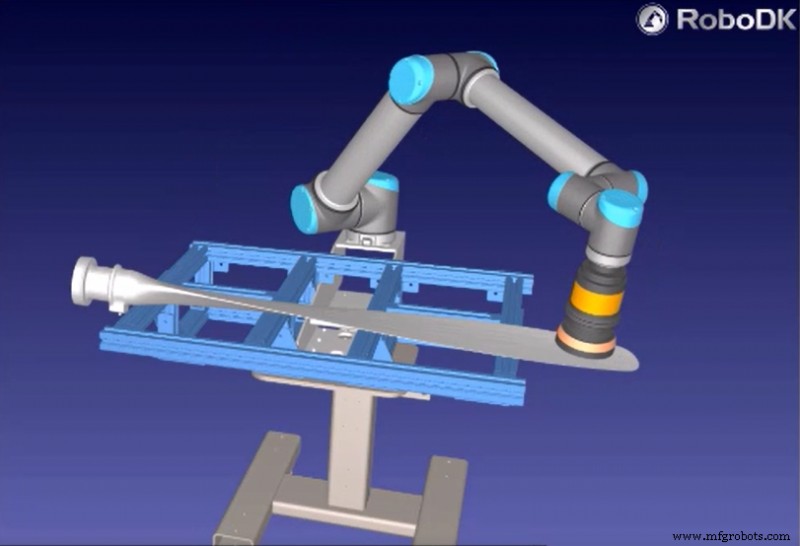
その結果、航空機のプロペラ ブレードの研磨など、高度な一貫性が要求される表面仕上げ作業に産業用ロボットを使用できるようになりました…
…これは、チームが Kane Robotics で行ったこととまったく同じです。
ご紹介… Kane Robotics
Kane Robotics は、米国カリフォルニア州に拠点を置く自動化統合企業です。彼らは主に航空および航空宇宙部門にサービスを提供し、多品種/低生産メーカーに自動化ソリューションを提供します.
彼らは会社の使命を次のように説明しています。「革新的で低コストの柔軟な自動化ソリューションを使用することで、熟練した航空宇宙労働者を時間のかかる反復的な製造作業から解放すること」
特に、研磨、研磨、仕上げ、エポキシの塗布、穴あけ、機械の手入れなどの用途で航空宇宙メーカーを支援しています。
同社のプロジェクトには、航空機のプロペラ ブレードの研磨が含まれていました。
プロジェクト:プロペラ ブレードの研磨
<ビデオ自動再生コントロールのミュート src="https://robodk.com/blog/wp-content/uploads/2021/08/Propeller-Polishing.mp4">プロペラ ブレードは、繊細で印象的なエンジニアリングです。それらは、飛行機が空中で推力を達成するための主要な手段です。製造プロセスにミスがあると、航空機の推進力が低下したり、最悪の場合、災害につながる可能性があります。
航空機製造において、研磨工程は非常に重要です。表面仕上げが悪いと、空気中に不必要な抗力が生じ、飛行機が必要以上に燃料を消費する可能性があります。
また、連邦航空局 (FAA) は、ブレードの表面に追加されたデリケートな保護コーティングを損傷する可能性があるため、プロペラの製造後に研磨しないことを強く推奨しています。その結果、製造中の研磨段階は、非常に重要な表面仕上げを得る最後の瞬間です。
Kane Robotics のチームは、ロボットと、ロボットによる表面仕上げ用に特別に設計された新しいタイプのオービタル サンディング エンド エフェクターを使用して、研磨アプリケーションの作成に着手しました。
ロボットは、このエンド エフェクターを使用してプロペラ ブレードを正確に研磨する必要がありました。

ロボット対応オービタル サンダーと RoboDK の統合
このプロジェクトを実行するチームの動機の 1 つは、使用していた新しいオービタル サンディング エンド エフェクターをテストすることでした。
ロボットによる表面仕上げの一般的な問題は、力の制御が必要なことです。手作業でやすりがけや研磨を行っている場合、仕上げツールによって加えられる力を正確に制御できます。ロボットでこれを行う最も一般的な方法は、力センサーを追加し、アクティブ コンプライアンスをツールにプログラムすることです。これはプログラミングが難しい場合があります。
Kane Robotics が使用したエンド エフェクターは、コンプライアンスをツール自体に組み込むことで、ロボットによる表面仕上げの展開をこれまでよりも簡単にしました。
コンプライアント オービタル サンダー
問題のエンド エフェクタは、ATI の AOV-10 準拠オービタル サンダーで、UR+ コンポーネントとしても入手可能です。
この新しいツールは、ロボット研磨を簡単にするために特別に設計されています。オービタル サンディング ツールの軸に空気圧コンプライアンスを組み込み、ワークピースの表面の微妙な変化にロボットが反応できるようにします。

Kane Robotics の COO である Alan Hiken 氏は次のように説明しています。
このような新しいエンド オブ アーム ツール (EOAT) オプションで RoboDK を使用する利点の 1 つは、以前の記事「任意のエンドを使用するための 5 分ガイド」で説明したように、ソフトウェア内に新しいエンド エフェクタを非常に簡単に追加できることです。 RoboDK を使用したエフェクター。
ハードウェアとソフトウェアのセットアップ
ATI サンディング ツールのおかげで、Kane Robotics のチームが使用したセットアップはかなりシンプルでした。
セットアップの主なコンポーネントは次のとおりです。
- ユニバーサル ロボティクスの協働ロボット
- ATI AOV-10 オービタル サンディング ツール
- プロペラ ブレードが固定されたテーブル
- オフライン プログラミング用の RoboDK。
この特定のオービタル サンダーがなければ、チームは外力センサーを組み込む必要があったかもしれません。これにより、ハードウェアのセットアップとロボットのプログラミングの両方が複雑になります。
RoboDK を使用すると、プログラミングが簡単になりました。
Kane Robotics が RoboDK を使用した理由
RoboDK により、チームはアプリケーションを迅速かつ簡単に立ち上げて実行することができました。
プログラミングはパス プランニング アクティビティのみで構成されており、RoboDK ではわずか数ステップで実現できます。
COO の Alan Hiken が RoboDK について語ったことは次のとおりです。
RoboDK を使用した理由を尋ねられたとき、彼は単純に次のように答えました。「CAD データがあるのなら、なぜそれを使用しないのですか?」
私たちはほとんど議論できません!
RoboDK でどのようなアプリケーションを実現できますか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションにご参加ください。
産業用ロボット
- 自律型ロボットで無駄を減らす方法
- TensorFlowを使用して変分オートエンコーダーを構築する方法
- 電解研磨・電解研磨とは | Junying 金属表面仕上げサービス
- CNC マシンの手入れ? Cobot を使った方法はこちら
- ステンレス鏡の傷の対処法
- RoboDK による無料のロボット トレーニング
- ケーススタディ:アディティブ マニュファクチャリング ワークフローの改善
- あるエンジニアが RoboDK を使用してダストフリーのロボット彫刻を実現した方法
- Sunrob Robotics でアジャイル チューブ切断を実現する方法
- 安川ロボットプログラミング入門
- Raspberry Pi 用 RoboDK の使用を開始する方法