


雑然としたシーンのオブジェクトを識別するための人工知能システム
ロボットビジョンは長い道のりを歩んできました。自動運転やオブジェクト操作など、複雑で要求の厳しいタスクのアプリケーションで高度なレベルに達しました。ただし、一部のオブジェクトが他のオブジェクトの背後に部分的または完全に隠されている雑然としたシーンで、個々のオブジェクトを識別するのは依然として困難です。通常、このようなシーンを処理する場合、ロボットビジョンシステムは、可視部分のみに基づいて遮蔽されたオブジェクトを識別するようにトレーニングされます。ただし、このようなトレーニングにはオブジェクトの大規模なデータセットが必要であり、面倒な場合があります。
リー・キュビン准教授と博士号韓国の光州科学技術院の学生スンヒョクバックは、雑然としたシーンでオブジェクトを識別して分類するための人工知能システムを開発しているときに、この問題に直面していることに気づきました。 「私たちは、ロボットがこれまで遭遇したことのない、または認識するように訓練されたことがないオブジェクトを認識して操作することを期待しています。ただし、実際には、ディープニューラルネットワークの一般化可能性はトレーニングデータセットの質と量に大きく依存するため、データを1つずつ手動で収集してラベルを付ける必要があります」とBack氏は述べています。
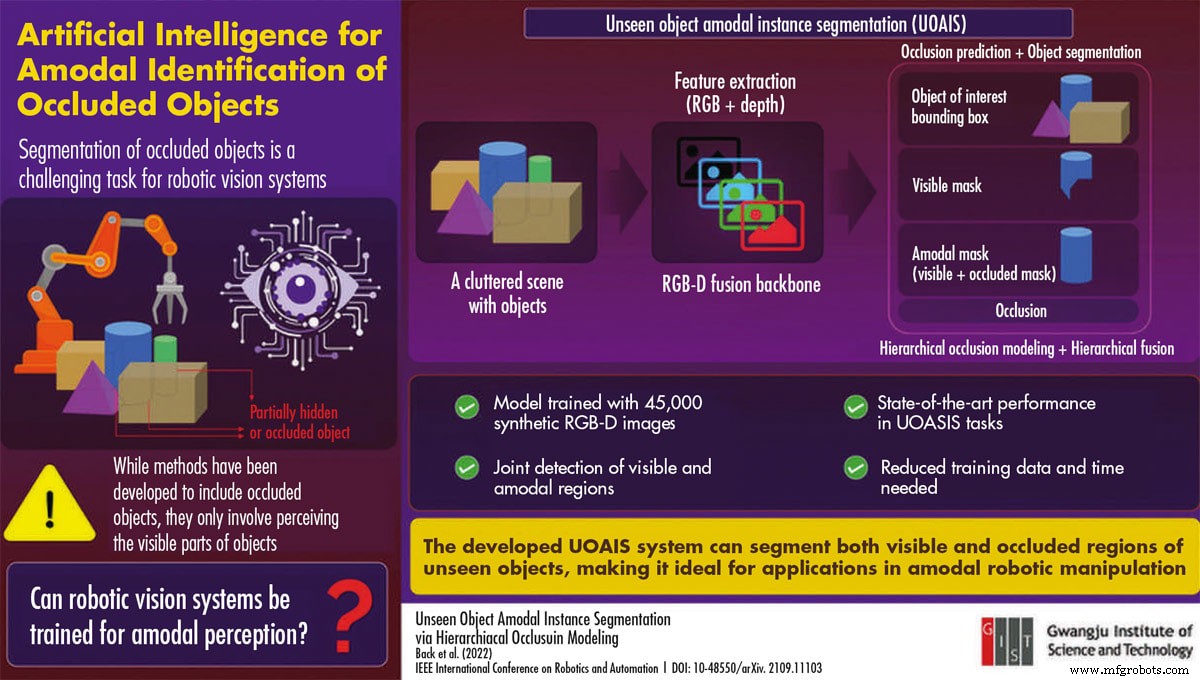
Lee教授とBack教授が率いる新しい研究では、雑然としたシーンで遮蔽されたオブジェクトを検出するための「見えないオブジェクトの非モーダルインスタンスセグメンテーション」(UOAIS)と呼ばれるモデルを開発しました。オブジェクトのジオメトリを識別するモデルをトレーニングするために、彼らは深度情報を含む45,000の写実的な合成画像を含むデータベースを開発しました。この(限られた)トレーニングデータを使用して、モデルはさまざまな遮蔽されたオブジェクトを検出することができました。雑然としたシーンに遭遇すると、最初に対象のオブジェクトを選択し、次にオブジェクトを「可視マスク」と「アモーダルマスク」にセグメント化することによってオブジェクトが遮られているかどうかを判断します。
研究者たちはその結果に興奮した。 「以前の方法は、特定のタイプのオブジェクトのみを検出するか、遮蔽された領域を明示的に推論せずに可視領域のみを検出することに限定されていました。対照的に、私たちの方法は、人間の視覚システムのように、遮蔽されたオブジェクトの隠れた領域を推測することができます。これにより、複雑な環境でのパフォーマンスを向上させながら、データ収集の労力を削減できます」とBack氏は述べています。
彼らのシステムで「オクルージョン推論」を可能にするために、研究者は「階層的オクルージョンモデリング」(HOM)スキームを導入しました。これは、複数の抽出された特徴とそれらの予測順序の組み合わせに階層を割り当てました。モデルを3つのベンチマークに対してテストすることにより、最先端のパフォーマンスを実現したHOMスキームの有効性を検証しました。
研究者たちは、彼らの方法の将来の見通しについて期待しています。 「雑然とした環境で見えない物体を知覚することは、アモーダルロボット操作にとって不可欠です。私たちのUOAISメソッドは、この面でのベースラインとして役立つ可能性があります」とBack氏は述べています。
詳細については、光州科学技術院のSeulhye Kimまでお問い合わせください。このメールアドレスは、スパムボットから保護されています。表示するにはJavaScriptを有効にする必要があります。; 82-627-156-253。
自動制御システム