

工業製造

このチュートリアルでは、Arduinoベースのスカラロボットを構築する方法を学びます。ロボットの設計から、ロボットを制御するための独自のグラフィックユーザーインターフェイスの開発まで、ロボットを構築するプロセス全体を紹介します。 次のビデオを見るか、以下のチュートリアルを読むことができます。 概要 ロボットには4つの自由度があり、4つのNEMA17ステッピングモーターで駆動されます。さらに、この場合、エンドエフェクタまたはロボットグリッパーを制御するための小さなサーボモーターがあります。このスカラロボットの頭脳は、モーターを制御するためのCNCシールドと4つのA4988ステッピングドラ

呼吸している空気の質について疑問に思ったことはありませんか。それとも、一晩中寝た後でも、オフィスで眠くなったり、朝に疲れたりすることがあるのはなぜですか。空気の質が悪いと、健康に悪影響を与えるだけでなく、倦怠感、頭痛、集中力の低下、心拍数の増加などを引き起こす可能性があります。空気の質を監視することは、実際にはあなたが思っているよりも重要かもしれません。したがって、このチュートリアルでは、PM2.5、CO2、VOC、オゾン、および温度と湿度を測定できる独自の空気品質モニターを作成する方法を学習します。 次のビデオを見るか、以下のチュートリアルを読むことができます。 概要 それぞれの空気

このチュートリアルでは、火星のパーサヴィアランスローバーのレプリカを作成した方法を紹介します。もちろん、現在火星を探索している本物のローバーに触発されて、このテクノロジーを愛するすべての人、学生、メーカー、メカトロニクス、ロボット工学の愛好家などがこのビデオの指示に簡単に従うことができるようにこのローバーを設計しました。独自の火星探査車を構築します。 次のビデオを見るか、以下のチュートリアルを読むことができます。 概要 このローバーの主な機能を見てみましょう。ロッカーボギーサスペンションを採用しているため、ローバーは起伏のある地形をスムーズに走行し、6つの車輪すべてを常に地面に接触さ

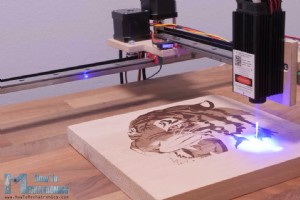
このチュートリアルでは、以前のビデオの1つで作成したDIY3Dプリントスカラロボットアームをレーザー彫刻機として機能するように変換した方法を紹介します。次のビデオを見るか、以下の記事を読むことができます。 プロジェクトの概要 スカラロボットには4つの自由度があり、4つのNEMA 17ステッピングモーターによって駆動され、Arduinoボードを使用して制御されます。元のビデオでは、Arduino UNOボードをCNCシールドと組み合わせて使用しましたが、ここでは、ArduinoMEGAボードをRAMPボードと組み合わせて使用します。ロボットの制御にMarlin3Dプリンターのファー
このチュートリアルでは、3Dプリンターを使用せずに、可能な限り最小限の部品で最も単純なCNCマシンを構築する方法を紹介します。それは正しい。最近のプロジェクトのほとんどで3Dプリンターを使用しています。もちろん、3Dプリンターは、好きな形を簡単に作成できるため、プロトタイピングに最適です。ただし、すべての人が3Dプリンターを持っているわけではないので、3Dプリンターや他のCNCマシンを使わなくても、ものを作ることができることをお見せしたいと思います。 次のビデオを見るか、以下のチュートリアルを読むことができます。 概要 単一の動力工具、ドリル、およびいくつかの手工具を使用して、このC
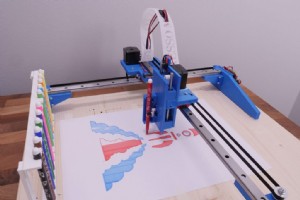
このチュートリアルでは、CNCペンプロッターまたは描画マシンをどのように構築したかを示しますが、1つの優れた機能があり、それがツールの自動変更です。つまり、マシンは自動的に色を変更できるので、本当にクールなものを描くことができます。 次のビデオを見るか、以下のチュートリアルを読むことができます。 概要 機械の構造は、私の前のビデオのDIY CNCレーザー彫刻機に基づいています。目標は、最小限の部品で最も単純なCNC機械を作ることでした。 X、Y、Z軸の動きに3つのNEMA 17ステッピングモーターを使用し、グリッパーに小さなサーボを使用します。このCNCペンプロッターマシンの頭脳は、C

Arduinoチュートリアルシリーズの最初のArduinoチュートリアルへようこそ。このチュートリアルでは、入門チュートリアルから始め、次のチュートリアルでは、高度なチュートリアルに進みます。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要な部分と、ビデオの例のソースコードがあります。 このArduinoチュートリアルに必要なコンポーネント Arduinoボード……。 LED………………….. ソースコード int led =13; void setup() { pinMode(led, OUTPUT
Arduinoチュートリアルシリーズの2番目のArduinoチュートリアルへようこそ。このチュートリアルでは、デジタル入力ピンと出力ピンがどのように機能するかを学び、ボタンとLEDを使用したいくつかの例を示します。また、PWM(パルス幅変調)とは何かを学び、PWMを使用してLEDの明るさを制御する例を示します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なパーツと、ビデオの例のソースコードがあります。 このチュートリアルに必要なコンポーネント Arduinoボード……………………………/AliExpres
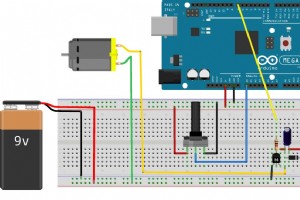
Arduinoチュートリアルシリーズの4番目のArduinoチュートリアルへようこそ。このチュートリアルでは、PWM(パルス幅変調)を使用してDCモーターとサーボモーターを制御する方法を学習します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なパーツと、ビデオの例のソースコードがあります。 最初の例に必要なコンポーネント DCモーター……………………………………。 またはCPUファンDCモーター………………….. バッテリー9Vまたはアダプター(9-12V)………。 Arduinoボード…………………
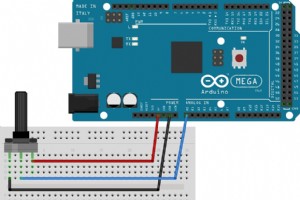
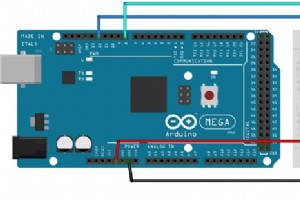
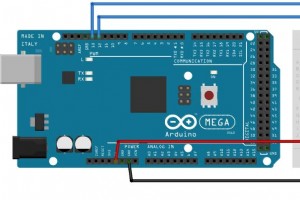
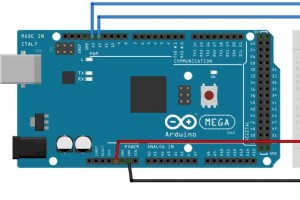
Arduinoチュートリアルシリーズの3番目のArduinoチュートリアルへようこそ。このチュートリアルでは、Arduinoアナログ入力ピンがどのように機能するかを学び、ポテンショメータとフォトセルを使用していくつかの例を示します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なパーツと、ビデオの例のソースコードがあります。 このArduinoチュートリアルに必要なコンポーネント Arduinoボード…………………………… ブレッドボードとジャンパー線……… LED…………………………………………… 220
このチュートリアルでは、SimMechanicsLinkを使用してSolidworksとMatlab/Simulinkを統合する方法を説明します。 Solidworks3Dモデルを使用したSimulinkシミュレーションの例を作成します。ビデオの下に、例の3DモデルとSimulinkモデルを見つけてダウンロードできます。 こちらの例からファイルをダウンロードしてください: Solidworks Model .STEPファイル: Solidworks3Dモデル-Assembly.STEP 1ファイル 202.76KBダウンロード SolidworksモデルSolidwork
Arduinoチュートリアルシリーズの5番目のArduinoチュートリアルへようこそ。このチュートリアルでは、シリアル通信がどのように機能するかを学び、理解を深めるためにいくつかの例を示します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なパーツと、ビデオの例のソースコードがあります。 このArduinoチュートリアルに必要なコンポーネント Arduinoボード…………………………… ブレッドボードとジャンパー線……… LED…………………………………………… 220オーム抵抗器…………………….. プッ
Arduinoチュートリアルシリーズの6番目のArduinoチュートリアルへようこそ。このチュートリアルでは、ArduinoをProcessingに接続する方法と、シリアルポートを使用して通信する方法を学習します。また、ProcessingIDEを使用してコマンドをArduinoボードに送信する例とその逆の例を作成します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なパーツと、ビデオの例のソースコードがあります。 このArduinoチュートリアルに必要なコンポーネント コンポーネントは、以下のいずれかのサ
Arduinoチュートリアルシリーズの7番目のArduinoチュートリアルへようこそ。このチュートリアルでは、ArduinoをMatlabに接続する方法と、シリアルポートを使用して通信する方法を学習します。また、Matlabを使用してArduinoボードを制御する例を示します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要な部分と、ビデオの例のソースコードがあります。 このArduinoチュートリアルに必要なコンポーネント Arduinoボード…………………………… ブレッドボードとジャンパー線……… LE
このチュートリアルでは、ロボットグリッパーメカニズムの3DモデルのPID制御を行う方法を説明します。 Simulinkモデルは2つのサブシステムで構成されています。 Simulinkブロックを使用したモデルであるDCモーターサブシステムと、SimMechanicsLinkを使用してSolidworksからインポートされた3Dモデル。ステップ関数を使用してDCモーターをアクティブにし、ロボットグリッパーを駆動し、SimulinkPIDブロックを使用してPIDのパラメーターを自動的に調整します。 次のビデオを見るか、以下のチュートリアルを読むことができます。 ここの例からSimulinkモ
このArduinoとMatlabのチュートリアルでは、Matlab GUI(グラフィックユーザーインターフェイス)を使用してArduinoボードを制御する方法を学習します。 LEDをオン/オフするための2つのボタンと、フォトセル(光依存抵抗器)からのアナログ入力をプロットするための軸を備えたMatlabGUIを作成します。 これは、従うのが簡単なステップバイステップのビデオチュートリアルです。また、ビデオの下には、このチュートリアルに必要なコンポーネントと、ビデオの例のソースコードがあります。 このチュートリアルに必要なコンポーネント コンポーネントは、以下のいずれかのサイトから入手
このチュートリアルでは、SolidworksでSpringアニメーションを作成する方法を学習します。このチュートリアルは、バルブとバルブサポートガイドの間に配置されるスプリングのアニメーションを作成するカムシャフトメカニズムで実装します。 これは、簡単に実行できるステップバイステップのビデオチュートリアルです。また、ビデオの下に、カムシャフトアセンブリの3Dモデルと、完成したチュートリアルの3Dモデルを見つけてダウンロードできます。 カムシャフトメカニズムアセンブリの3Dモデルをここからダウンロードします: Solidworksの部品とアセンブリファイル: Spring Ani
このチュートリアルでは、Solidworksでプログレッシブカッタウェイアニメーションを作成する方法を学習します。これはステップバイステップのビデオチュートリアルであり、簡単に実行できます。 このチュートリアルで使用されている3Dモデルを見つけてダウンロードできるビデオを以下に示します。 3Dモデルは、以前の投稿SolidworksのSpeedReducerAnimationからダウンロードできます。

このArduinoチュートリアルでは、A4988ステッピングドライバーを使用してステッピングモーターを制御する方法を学習します。次のビデオを見るか、以下のチュートリアルを読むことができます。 概要 A4988は、簡単な操作のためのトランスレータを内蔵したバイポーラステッピングモーターを制御するためのマイクロステッピングドライバーです。つまり、コントローラーから2つのピンを使用するか、1つは回転方向を制御し、もう1つはステップを制御することで、ステッピングモーターを制御できます。 ドライバーは、フルステップ、ハフトステップ、クォーターステップ、8ステップ、16ステップの5つの異なる
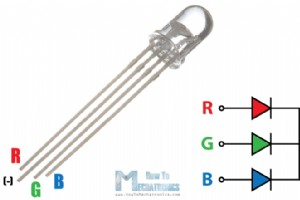
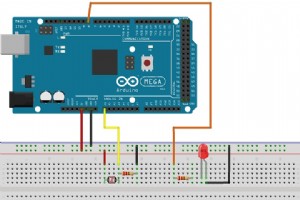
このArduinoチュートリアルでは、RGB LEDとは何か、およびArduinoボードでの使用方法を学習します。次のビデオを見るか、以下のチュートリアルを読むことができます。 RGB LEDとは何ですか? RGB LEDは、赤、緑、青の3つの基本色を混合することにより、さまざまな色を放射できます。つまり、実際には、赤、緑、青の3つの別々のLEDが1つのケースに詰め込まれています。そのため、4本のリード線があります。3色ごとに1本のリード線があり、RGBLEDのタイプに応じて1つの共通のカソードまたはアノードがあります。このチュートリアルでは、一般的なカソードを使用します。 この
製造プロセス





