工業製造

Motoman UP20 は、世界中の多くの工場で使用されている複雑なロボット システムです。 UP-20 は、(ベースから) S、L、U、R、B、T 軸と名付けられた複数の軸で構成されています。しかし、特定の主要コンポーネントがなければ、これらの金属片はどこにも行きません。手首アッセンブリー、タイミングベルト、各軸の減速機、内部配線、サーボモーターもあります。 リスト アセンブリ (部品番号 HW9170593) は、任意のロボットのアームの端部ツーリングが取り付けられる場所です。これは EOAT が可動性を得る場所であり、ロボットがアプリケーションを適切に実行するには、HW-917-05

Motoman SV3X と同様に、Motoman SV3XL は、溶接やマテリアル ハンドリングだけでなく、その両方が可能なロボットです。ただし、Motoman SV3XL はロボットのリーチが長いモデルであるため、姉妹品の SV-3X とは内部の仕組みが異なります。しかし、彼女の姉妹ロボットと同様に、SV3XL は依然としてモーター、減速機、および内部配線のシステムによって動作します。 SV3-XL の AC サーボモーター (部品番号 HW9381586-A、HW9381587-A、および HW9381589-A) は、ロボットの S、L、U、R、B、および T 軸にあります。これらの

テクノロジーには、変化のスピードを加速させるバンプがときどきあります。 Motoman ティーチ ペンダントに関して言えば、そのバンプは DX100 でした。 それ以前のものとは異なり、DX100 ティーチ ペンダントは最大 8 台のロボット (72 軸) を制御します。これは、ラインナップの以前のモデルの 2 倍であり、メーカーは同じタスクを実行するための機器の購入を減らすことでコストを節約できます。 この省エネ ティーチ ペンダントは、以前のモデルよりも処理速度が速く、高度なロボット アーム制御により、よりスムーズな動作とより迅速な I/O 応答を実現しました。 Motoman DX-

それよりも前にティーチ ペンダントが登場しましたが、ロボット工学のリーダーであるファナックの RJ3 ティーチ ペンダントは、同社のティーチ ペンダント技術に大きな進歩をもたらしたシリーズの最初のものでした。 ファナック RJ3 ティーチ ペンダント (部品番号 A05B-2301-C305) は、人間工学に基づいて設計された最初のティーチ ペンダントの 1 つであり、作業者にフィットして怪我を防ぐように設計されています。以前は、ティーチペンダントは重く、照明も少なかった. RJ-3 ティーチ ペンダントは、手や腕への負担を避けるために軽量で、目の疲れを防ぐバックライト付きの大型スクリーンを

Fanuc R30iB ティーチ ペンダントは、Fanuc が提供する最新のティーチ ペンダント モデルの 1 つです。経済的、高速、効率的でありながら操作が簡単なティーチ ペンダントとして、ロボット業界で受け入れられつつあります。 R-30iB ティーチ ペンダント、部品番号 A05B-2518-C302 は、このペンダントを設計する際の焦点の 1 つが使いやすさであったため、人気があります。 iPendant Touch は、人間工学に基づいたデザインと大きなカラー タッチ スクリーンにより、昔のファナック ティーチ ペンダントに詳しい人なら誰でも認識できますが、追加のファンクション キ

人気のあるシリーズが終了するときは、常に盛り上がりを見せる必要があります。 Fanuc RJ3 シリーズの最高峰は、Fanuc RJ3iC ティーチ ペンダントです。 RJ3iC、部品番号 A05B-2490-C175、ティーチ ペンダントは、衝突検出、人間工学に基づいて設計されたペンダント、マルチタスク オペレーティング システムなど、以前のモデルに見られた機能の多くを保持しています。このペンダントは、iPendant タッチ スクリーン オプションの豪華さを維持しながら、カラー ディスプレイで品質を向上させます。 しかし、市場での競争力を維持しているのは、このティーチペンダントの革新で

人間は周囲の環境要因を感知することができ、自分の体の各部分が常に何をしているかを認識していますが、ロボットにはこのような贅沢はありません。小型で軽量なセンサーは、ロボットが自分のいる場所、何をしているか、自分のパーツがどこにあるかに適応するのに役立ちます。エンジニアは、ロボットがより複雑になるにつれて、ロボットで使用されるセンサーの数を増やします。 1 つのタスクで、さまざまなセンサーの組み合わせが必要になる場合があります。 光センサーは光を検出し、電圧差を生み出します。フォトレジスタと太陽電池は、最も一般的なタイプの光センサーです。フォトレジスタの抵抗値は光強度の変化に応じて変化し、簡単に

ロボット ユーザーの大半は自動車、電子機器、消費財メーカーですが、中小企業はロボット市場の成長セグメントを代表しています。驚くかもしれませんが、Motoman の顧客の 95% は 5 台以下のロボットを所有しています。従業員が 100 人未満でロボットが 10 台未満の企業は「小規模企業」と見なされ、ロボットに投資する際に特有の課題に直面します。 中小企業は通常、製品の範囲が狭く、アプリケーションがより正確であるため、アプリケーションを多様化する機会があまりありません.しかし、所有者が情報を入手し続ければ、システムの柔軟性と、現在のニーズだけでなく将来のニーズを満たすためにロボットをどの

生産性を高めるために、ロボットは巨大である必要はありません。小型ロボットは、製造市場でニッチを見つけています。 KUKA は、包括的な小型ロボット ファミリーである KR AGILUS シリーズを発表することで、小型ロボットが製造業で非常に効果的であることを証明します。一連のロボットは、5 軸または 6 軸、高速、短いサイクル時間、および統合されたエネルギー供給システムを備えています。 KR AGILUS シリーズは、新しい自動化コンセプトで人間と機械の協調を簡素化する Safe Robot 機能を導入しました。 Motoman SV3 はコンパクトな 6 軸産業用ロボットで、溶接や組み

Motoman ラインの多くのロボットと同様に、UP165 は想像以上に多くの部品を備えた複雑な機械です。各 Motoman ロボットと同様に、UP-165 にはサーボモーター、内部配線、およびロボットの動きを助けるその他の部品があります。ただし、Motoman UP 165 の手首の構造により、ロボットはそれに応じて仕事を行うことができます。リストユニット、部品番号 HW917 は、リストとリストベースで構成されています。 部品番号 HW9100890-1 のリスト ベースは、B 軸でリストをロボットの残りの部分に取り付けるロボットの一部です。このリストベースは、手首からロボットの残りの部

ロボットが実行できるタスクの範囲は、年々急速に拡大しています。過去数十年の間に、ロボットは、人間にとって危険で退屈で疲れる多くのプロセスで手作業に取って代わりました。自動化は、手作業に比べてメーカーの精度、速度、効率を向上させることができます。 産業用ロボットは、重い物体の持ち上げ、化学薬品の取り扱い、塗装、組み立て作業など、反復的または危険な作業に最適です。それらは自動車および製造業で見られます。産業用ロボットの最初のタイプは、デカルト/ガントリー ロボットです。デカルト コーディネーターと一致する 3 つのジョイントを備えたアームが装備されており、ピック アンド プレース作業、シーラント

Fanuc RJ3iB は、Fanuc で人気のある RJ3 シリーズの 2 番目のティーチ ペンダントです。変わらない機能もたくさんありましたが、変更された機能もたくさんありました。 その前のティーチ ペンダントと同様に、Fanuc RJ3-iB (部品番号 A05B-2301-C370) は、1 つのペンダントから最大 16 軸のモーションを制御しました。また、人間工学を考慮して設計されています。 RJ3IB は、その前身と同じように軽量設計で、大きくて読みやすいバックライト付きディスプレイを備えていました。 RJ3 は最大 3 つの補助モーション グループしか移動できませんでしたが、R

Motoman は、他のロボット企業と同様に、限られたスペースでの作業を促進するコンパクトなロボットを開発しました。 MH5F および MH5LF は、小型部品の組み立て、マテリアル ハンドリング、およびパッケージング用に設計されたコンパクトで強力なモデルです。両方のモデルのスリムなアーム設計により、ロボット ツーリングとアッパー アームの間の干渉が軽減されます。 B 軸の可動範囲も改善され、B 軸と Y 軸の間の距離が短くなり、運搬能力が向上します。 Motoman の HP3 産業用ロボット アームは、小さくコンパクトな環境で動作するように設計されています。リーチが 701 mm で、機

良いものは小さなパッケージに入っています。コンパクトなロボットは小さな作業スペースに収まり、大型ロボットと同じように柔軟で生産的です。コンパクト ロボットの明白な利点の 1 つは、設置面積が大幅に削減されることです。 小型ロボットの寸法は、従来のロボットセルよりもはるかに小さいです。これにより、マシンは最小の工場スペースにも簡単に収まり、他の機器と統合できます。優れた柔軟性を備えたコンパクトなロボットは、小さなスペースで大きな仕事を完了するように設計されています。コンパクトなロボットは、最小限の可動部品で構成されているため、一定の動作に対する優れた信頼性を提供します。サイズが原因で機能が損な

すべての歴史はどこかで始まる必要があります。 Motoman Robotics のティーチ ペンダントの歴史は、Motoman MRC ティーチ ペンダントから始まります。これは Motoman が持っていた最初のティーチ ペンダントではありませんが、多くの分野で最初のものでした。 1994 年に導入された MRC ティーチ ペンダント、部品番号 JZNC-MPP10E、JZNC-MPP20E、および JZNC-MPP22E は、時代を先取りしていました。 1台のペンダントで2台のロボットを同期できる初のロボットティーチペンダントです。 SK シリーズ用に作られた JZNCMPP10E MR

ティーチペンダントが競合他社と一線を画す点の 1 つは、その使いやすさです。 1998 年、Motoman XRC ティーチ ペンダントはその分野で最高であり、ユーザー フレンドリーなデザインで賞を受賞しました。 XRC ティーチ ペンダントは、4 年前の MRC に続く Motoman の次のステップでした。 XRC Motoman ティーチ ペンダントは、以前のモデルが 21 に制限されていた最大 27 軸を制御することができました。Motoman の UP シリーズ ロボット用に設計されたこのティーチ ペンダントは、一度に 2 つではなく 4 つのロボットを同期させることができました。

プラズマ切断の世界では、作業を完了するために利用できるさまざまなデバイスがいくつかあります。手動のポータブル プラズマ カッターを使用するショップもあれば、プラズマ切断ロボットを使用して自動化するショップもあります。それぞれの方法には長所と短所があります。 それでは、始める前に、プラズマ切断とは何ですか?プラズマ切断は、さまざまな厚さの金属を切断するためにいくつかの異なる業界で使用されているアプリケーションです。トーチは、高速で吹き付けられた不活性ガスを使用し、電気を加えてガスの一部をプラズマに変えます。プラズマは非常に高温であるため、金属ワークピースを溶かし、溶けた金属はガスによって吹き飛
今日の製造業では、ロボットによるバリ取り技術が多くの用途で使用されています。ビジョン技術を使用して、小さな部品のバリ取りを行うロボットもあれば、大きな部品のバリ取りを行うロボットもあります。産業用ロボット工学のリーダーである Fanuc Robotics は、最新のロボットによるバリ取り技術をリードしています。 ファナックには、バリ取りやその他の材料除去用途に適したロボットが多数あります。バリ取りの違いを実際に生むのは、使用するアームの端のツーリングです。多くのロボットは、エンド エフェクタをすばやく交換するだけで、複数の異なるアイテムを柔軟にバリ取りできます。 ファナック M シリーズの

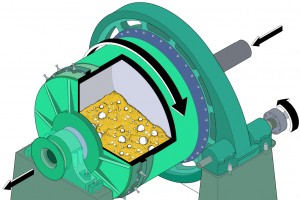
ロボットへの投資は決して安価なものではありません。車と同じように、システムによって異なりますが、25,000 ドルから 75,000 ドル以上の範囲になります。掘削ロボットも例外ではありません。しかし、産業用ロボットの場合、メーカーはコスト以上に何千ドルも節約でき、通常は最初の 1 年で元が取れます。 これは、ガラス強化プラスチック工場に設置された Motoman 掘削ロボット システムの場合に当てはまりました。 Motoman の Web サイトによると、Motoman が工場に設置したロボット掘削システムは、わずか 4 か月で採算が取れました。 このメーカーは、ガラス強化プラスチックバ

研削砥石は、工業環境と同じくらい多くのワークショップで一般的です。機械の壊れやすい部品である研削砥石のお手入れのルールは、研削が趣味であろうと、自由に使える研削ロボットの艦隊全体を持っていようと、似ているようです. 前述のように、ハンドヘルドまたはロボットのエンドエフェクターに関係なく、研磨ホイールは壊れやすいものです。このため、何か予期せぬことが彼らに当たったり、進路に入ったりした場合、簡単に欠けてしまいます。 新しい砥石を手に入れたときに最初にすべきことは、砥石自体を検査することです。これは、砥石のお手入れの最も重要なステップの 1 つです。 Yahoo.com の記事によると、砥石に
産業用ロボット