工業製造

ロボット自動化の利点を理解するのにロケット科学者は必要ありません。ロボットは、製造業者が生産速度を速め、手作業を危険な状態から守り、業界の柔軟性と多様性を高めることを可能にしました。多用途ロボットにより、生産プロセスが合理化されました。 ロボットは、新しいプロセスや市場の需要の変化に適応できます。それらの汎用性により、ピッキングと配置、溶接、流体の分配、外観の変更など、必要なタスクに必要な再プログラムにかかる時間を最小限に抑えることができます。 ロボットのユーザーがより多くの汎用性を要求するにつれて、ロボットアームエンドツーリングの重要性が増しています。柔軟でインテリジェントなエンド オ

トランスフォーマー?ほとんど!モジュラー ロボティクスは、他のモジュールと接続または組み合わせて異なるタイプのロボットを形成できる、ロボットの単一セクション (モジュールと呼ばれる) の構築に焦点を当てています。モジュールは、ワイヤレスで、または赤外線または表面電気信号を使用して、他のモジュールと通信します。モジュールが協働して、より大きなセクションを動かしたり形を変えたりします。 NASA、軍事、捜索救助、鉱業などの業界は、モジュラー ロボットに関する知識と創造性をさらに高めることに関心を持っています。 モジュール式の自己再構成可能なシステムは、モジュールの幾何学的配置によって分類されます

ロボットは、自動化するプロセスに多様性をもたらします。特に食品業界では、ケースのパレタイジングやパッケージングなどのプロセスにおける自動化により、生産速度が向上し、精度と効率が向上しています。 Advance Brands は、調理済みの鶏肉、牛肉、豚肉を提供しています。食肉は、パッケージングの自動化で一般的に知られている業界ではありませんでしたが、Advance Brands では優先事項になりました。彼らの在庫は特別な顧客注文のために生産されており、自動化により、さまざまなアイテム、さまざまなパッケージ スタイル、およびさまざまな種類のパッケージに適応できます。工場内の自動化ライン

汎用性を高めるために適切な EOAT を選択することは、エンド ユーザーのニーズとロボット インテグレーターの知識に基づいています。エンドエフェクタは、角度付きと平行の両方のスタイルで利用でき、電気、油圧、機械、または空気圧で作動します。空気圧式 EOAT は、大部分の工具で使用されており、重量と出力の比率が高いため、ほとんどのパッケージング アプリケーションにも対応しています。ただし、グリップ力の制御も少なく、電動 EOAT よりも柔軟性が低くなります。油圧 EOAT は、高いクランプ力を生成し、迅速に作動させることができます。消費電力、サイズ、複雑さ、重量、および要件に応じて、特定のタイプ

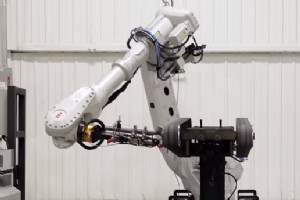
ロボットは、さまざまな目的のために設計されています。ロボットが使用される特定の目的に応じて、適切な機能のために固有の設計が不可欠です。 ロボット工学の設計プロセスは、ロボットが使用される問題またはタスクを定義することから始まります。設計を作成する前に、建設の特定の要件と目的に対処する必要があります。次に、ロボットがどのように動き、物体を操作し、感知し、知性を獲得するかなど、タスクの詳細と実際の機能を特定するための研究が行われます。この時点でプロトタイプを作成して、設計のテストとトラブルシューティングを行うことができます。次に、ロボットの構築を開始できます。構築後は、プログラミング、テスト、お

コンピューティングの進歩に伴い、ロボティクスの自動化とアプリケーションに対する需要は常に拡大し、発展しています。製造業は、ロボットに多額の投資を行った最初の産業であり、依然として主要な雇用主ですが、航空宇宙、農業、防衛、鉱業、医療、エネルギー、教育などの分野でのロボットの台頭は重要です。ロボティクス エンジニアは、ロボットの設計、保守、新しいアプリケーションの開発、およびロボットが最大限の可能性を発揮できるようにするための研究の実施を担当します。 多くのタイプのロボットエンジニアが存在します。先見の明のあるエンジニアは、実験用ロボットを作成および設計します。ロボットが別の惑星を移動するの

ファナックの M-430iA/2F は、画期的な高速ピッキングおよびパッキング ロボットです。食品業界のニーズに合わせた連続ピッキングに最適な設計です。一次 (非包装) と二次 (包装) の両方の食品処理に対応しています。 M-430iAは、知能ロボット制御システムを搭載した5軸電動サーボ駆動ロボットです。これは、ファナックのインテリジェントなビジュアル トラッキングと連携して、ピッキングおよび梱包作業を高速化します。 ロボットは、食品の洗浄や、洗浄に使用される酸性またはアルカリ性の洗浄剤に耐えることができます (IP67 の等級)。バクテリアの増殖や錆びに強く、食品グレードのグリースと部

オブジェクトを積み重ねたり、積み重ねたりするのは面倒で、手作業の作業者にとって危険な場合があります。スタッキングの自動化により、重い物を持ち上げたり繰り返し動作したりすることによる労働者の怪我を事実上なくすことができます。製造業では、マテリアル ハンドリングにプレス トランスファーおよびスタッキング ロボットが使用されています。 KUKA の新しい KR QUANTEC シリーズには、新しいコンパクトなデザインのパレタイジング ロボットが含まれています。より軽量なコンポーネントを使用することで、ロボットは積み重ね時間を短縮できます。ロボットには、120、180、および 240 kg のペイロ

パラレル ロボットは、シリアル ロボットとは対照的に、固定ベースと可動部分の間にいくつかの単純な軽量アームがあります。各アームは独自のモーターによって制御され、その動きはコンピューターによって調整されます。アームはロボットベースのできるだけ近くに配置され、独立したリンケージは他のリンケージの位置とは無関係に連携します。これにより、安定性とアームの剛性が向上し、シリアル オートメーションよりもサイクル タイムが短縮されます。 ほとんどの医療アプリケーションではシリアル ロボットが使用されますが、シリアル ロボットは通常大きくて重いため、欠点が生じる可能性があります。パラレル ロボットは、そのコ

正確で効率的な動きを維持する必要があるため、ロボットのピッキングには再現性が不可欠です。ピッキングの自動化により、部品をピッキングして別の場所に配置するプロセスが高速化されます。ピッキング ロボットは、ピッキング プロセスの繰り返しの性質から容易に疲労する手作業に取って代わります。 ファナックのピッキング ロボット ファミリの最新のイノベーションは、M-1iA および M-3iA デルタ ロボットです。 Delta ロボットには、ロボットのフェースプレートに直列ではなく並列に作用する機械軸があり、迅速かつ正確な動きを促進します (最高速度は毎秒 10 メートル)。 M-1iAは、高速ピッキン

ロボットが薬を投与したり、プラスチックの縁をバリ取りしたり、部品を梱包したりできるようになる前に、ロボットを作成する必要があります。エンジニアは、プログラミングされた目的を果たすようにロボットを設計した功績を認められます。機械エンジニアは、ロボットの構造、関節機構、ベアリング、熱伝達特性などを設計します。電気エンジニアは、制御電子機器とパワーアンプを担当し、コンピューターエンジニアは、ロボットのコンピューティングハードウェアを設計します。これらのタイプのエンジニアが協力して、完全なロボットを構築します。 ロボット工学に焦点を当てた機械エンジニアになるために、ほとんどの人は 4 年間の工学の学

CNC Engineering, Inc. は、北米最大のファナック制御レトロフィット プロバイダです。コネチカット州エンフィールドを拠点とし、多数の製造業にファナック システムを提供しており、98% の顧客維持率を誇っています。彼らのビジネス目標は、定期的に顧客の期待を超えることです。 CNC Engineering, Inc. は 1983 年に設立され、今年で 30 周年を迎えます。同社の Web サイトでは、ファナック ドキュメントの最大のオンライン コレクションを提供しています。 CNC の製品とサービスの一部には、2 年間の部品保証が付いたファナック レトロフィット パッケージ

工場にシーリングロボットを導入することには、いくつかの利点があります。ただし、シーリング ロボットによる自動化を開始する前に、答えなければならない大きな問題があります。あなたの工場は、シーリング ロボットの自動化に適していますか? 使用されている設備によっては、ロボットによるシーリングにはいくつかの要因があり、製造業者にとって不利または制限と見なされる可能性があります。制限要因には、部品のプレゼンテーション、異なる部品の量、必要な材料の量、部品のサイズと形状、部品の異なる材料などがあります。 基本的に、ロボット シーリング システムによる自動化を決定する前に、現在の生産モデルと、シーリング

ものづくりの工程を設計するために、生産工学の専門分野である工具工学があります。この分野の労働者は、工具や機械を開発し、設備を統合して製品を生産します。工具工学の背景には、治具設計、プレス工具設計、ダイカスト設計、プラスチック金型設計、および切削工具設計の分野の研究が必要です。 工具エンジニアは、伝統的に設計図をもとに原材料にデザインを記入していました。旋盤、フライス盤、研削盤、ジグボーラー、グラインダーなどの手動制御工作機械は、エンジニアが設計のサイズと形状を切断するのに役立ちます。コンピュータ支援設計とコンピュータ支援製造は、CNC 工作機械とともに、今や手動の工作機械に取って代わりました

部品の構造化されていない環境のため、ビンピッキングは従来から製造業者にとって問題でした。ランダムに配置された部品の山がビンに順序付けされずに保管されている場合、それらを分離してから、部品の幾何学的特性に適応できるコンベヤー ベルトに配置する必要があります。ロボットの以前の 2D の性質は、これを行うのに課題を提示しましたが、インテリジェントな視覚誘導ロボット システムは、ピッキング プロセスを自動化できます。 Fanuc Robotics は、iRVision 3D レーザー ビジョン センサーを搭載した M-2000iA を開発し、ビンから部品を見つけてピッキングします。ファナックのインテ

フラックス入り溶接は、今日の製造業やその他の産業で利用できる、より一般的な溶接用途の 1 つです。よくあることなので、フラックス入り溶接の問題を回避し、溶接品質を向上させるためのヒントがいくつかあります。 Bernardwelds.com によると、製造業者が直面する問題の 1 つは、ロボット溶接パッケージのワイヤ送給の問題です。ワイヤ送給装置にバーンバックまたはバードネストの問題がある場合、アークは時期尚早に消されます。これにより、溶接に欠陥が生じ、メーカーにとってかなりのダウンタイムが発生する可能性があります。 メーカーは、ワイヤ送給速度が正しく、ワイヤが絡まっていないことを確認するこ

工業プロセスで使用される最も一般的なアーク溶接の 2 種類は、ガス メタル アーク溶接とフラックスコアード アーク溶接です。 GMAW と FCAW の問題を調査すると、これらのプロセスは異なり、製造アプリケーションに適用した場合に異なる長所と短所があることがわかります。 GMAW または MIG 溶接としてよく知られているガス メタル アーク溶接は、2 つの金属片を溶接するフィラー メタルに使用される連続供給ソリッド ワイヤ電極を使用します。外部から供給されるガスは、溶接中および溶接後、溶接が硬化する前に外部汚染物質を遠ざけるために使用されます。 Lincoln Electric の We

ファナック ロボティクスは、何十年にもわたってメーカーに単腕アーク溶接ロボットを供給してきました。現在、技術の進歩により、ファナックは製造業者に双腕アーク溶接ロボットを提供するシステムを提供することもできます。このデュアル アーム アーク溶接ロボット システムは、両方のロボットのパフォーマンスを向上させ、製造プロセスをより効率的にすることができます。 マテリアル ハンドリングの Motoman DIA シリーズのように、人間に似せた双腕のロボットを作る代わりに、ファナックのロボットは分離され、アプリケーションの実行中に DualARM コントロールを使用して連携するようにプログラムされていま

以前の溶接ロボットと同じように、マテリアル ハンドリングを既存の生産ラインに統合することは、難しい作業になる可能性があります。メーカーは、マテリアル ハンドリング プロセスの各ステップを調べて、それをロボットで動作するように変換する必要があります。これは、人間で動作するように変換するのとは異なります。 多くの場合、メーカーは、ロボット統合を使用するために、マテリアルハンドリング生産ライン全体を変更する必要がある場合があります。これらの企業がマテリアル ハンドラーを考慮せずに統合した場合、統合されたロボットは生産性の向上に効果的ではない可能性が高くなります。 生産設計のレイアウトが完了した

溶接ロボットが達成した高レベルの精度により、溶接は製造業では高度に自動化されたプロセスです。ただし、ワークピースの配置は、ロボットによる溶接と同じくらい重要です。そのため、ロボット溶接ポジショナーが非常に重要です。 ロボット製造のリーダーである Fanuc Robotics は、ターンキー、観覧車、固定テーブルなど、他社と同じロボット溶接ポジショナーを使用していますが、最も正確なポジショナーの 1 つはロボット自体です。 前述のように、ワークピースの配置の精度は、溶接が行われるのと同じくらい重要です。適切な位置に配置しないと、溶接が金属片の間違った場所に行われる可能性があり、その結果、部品
産業用ロボット