工業製造

すべてを行うことができる製造セルが 1 つだけ必要だったと想像してみてください。それが、研究者チームが RoboDK で行っていることです。 現在どのように部品を製造しているか考えてみてください。 工程が多いですね。 1 つのセルが原材料を使用可能なワークピースに変えます。別のセルが部品の大まかな形状を切り出し、その後、細かい加工を完了します。さらに別のセルが表面仕上げを行います。最終的に、あなたの職場は機械でいっぱいになり、オペレーターは追いつくためにあちこち走り回ることになります. これらすべての段階を完了するのに 1 つのセルがあれば便利ではないでしょうか? これは、研究者グループが

オフライン プログラミングで最も困難なタスクの 1 つは、ロボット コンベアのシミュレーションです。簡単にするための 10 のベスト プラクティスを次に示します。 コンベアはシミュレーションが難しい場合があります。動くオブジェクトをロボット プログラムに追加するとすぐに、事態は複雑になります。 ありがたいことに、オフライン プログラミングを使用してコンベアを簡単にシミュレートするために実行できる特定の手順があります。 シミュレートされたコンベアの 3 つの良い例 優れたプログラミング プラクティスを学ぶ最善の方法は、適切に設計された例を見ることです。 RoboDK では、コンベアをシ

ロボットがワークスペース内のオブジェクトと衝突するのをどのように防ぎますか?生活を苦しめることなく、ロボットの衝突を回避する方法は次のとおりです。 RoboDK フォーラムでの最近の質問では、ロボットに関する一般的な問題が浮き彫りになりました。ユーザー Micronexx は、衝突を回避する方法を尋ねました。彼らは、RoboDK が衝突のないパスを自動的に生成するのか、それともユーザーが手動で調整する必要があるのかを尋ねました。 これは、一見したよりも複雑な問題です。 RoboDK には、いくつかの自動ルーティングなど、衝突を回避するのに役立つ機能が確かに含まれています。しかし、

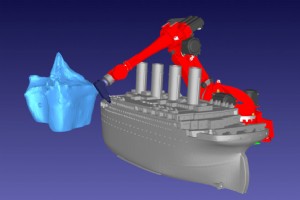
航空宇宙産業が 1 機の航空機に何千もの穴を開ける必要があることは周知の事実です。しかし、ここ数年、産業用ロボットによる掘削は、製造コストを削減し、生産性、信頼性、および精度を向上させるのに役立ちました。その秘密は、ロボットを使用してこのレベルの自動化を実現する方法にあります. 最近、私たちは同じ自動穴あけ技術を適用して見事な芸術作品を作成することに関与しました. 自動化されたロボット穴あけは、芸術的およびデジタル アート プロジェクトで見られるようになりました。これは、アーティスト Robert Longo のために Neoset Designs のファブリケーション スタジオが作成した芸

想像できるものなら何でも作れるとしたら、何を作りますか? Rhino と RoboDK を一緒に使用することで実現できる 6 つの素晴らしいことを紹介します。 制限がないとしたら、あなたのロボットで何を作りますか? あなたのデザインの唯一の制限があなたの想像力だったら? アイデアから最終製品までの道のりは簡単でしたか? ロボットによる製造には、これまで不可能だった設計を作成する能力があります。ロボットは、外部軸と組み合わせると、ほぼ無限のワークスペースを持ち、ほぼどの方向からでもワークピースにアプローチできます。 しかし、物理的なロボットには非常に多くの機能がありますが、作成できる

ロボット コンベアのプログラミングは、多くの人が想像するよりも難しいものです。優れたシミュレーションは成功への鍵ですが、夢中にならずにそれを行うにはどうすればよいでしょうか? コンベア ベルトは、製品をロボットに移動する簡単な方法ですよね? ええと… そうではありません。コンベアは単純なソリューションのように思われがちですが、実際には、コンベアはより複雑なワーク搬送方法の 1 つです。コンベア上を移動する物体をロボットが検出して追跡する必要があります。これらは、ロボット プログラムを介して制御する必要があります。また、トラッキングの低下、ベルトの摩耗、スリップなど、生涯にわたってさまざま
ロボットフライス加工はメーカーだけのものではありません。また、映画業界が見事な小道具や恐ろしいアニマトロニクスを作成するのにも役立っています。 1993 年の最初のジュラシック パーク映画を見たことがありますか? T-レックスを覚えていますか?もしそうなら、巨大な物理的な小道具によって生み出される驚くべき効果に感謝するでしょう. T-レックスの画面上の巨大な存在は、現代の映画のモンスターではめったに経験しない恐怖を引き起こしました.そして、今日のコンピューターで生成されたものと比較して非常に現実的だったのには十分な理由があります — それは、特殊効果アーティストのチームによって完全に手作
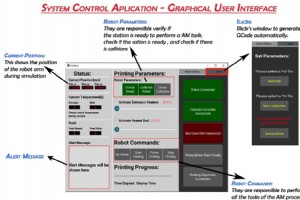
ソフトウェア ワークフローを改善することで、3D プリント プロセスの重要な時間を短縮できます。研究者が RoboDK を使用して積層造形ワークフローをどのように改善したかを次に示します。 ロボットを使用して 3D プリントを行う場合、ソフトウェア ワークフローが生産性に重要な影響を与える可能性があります。ワークフローを数分でも短縮できれば、時間の経過とともに生産性が大幅に向上する可能性があります。 通常、異なるソフトウェア パッケージを切り替えるのにかかる時間は短いですが、ワークフローがスムーズにいかなくなり、その結果、アディティブ マニュファクチャリングの効率が低下する可能性がありま
Autodesk Inventor 用の新しいプラグインを使用すると、製造プロセス用に特別に設計された、世界トップクラスの CAD/CAM パッケージにアクセスできます。 Autodesk Inventor は、CAD/CAM プログラムの世界における真のスーパースターです。 CAD Trends の調査によると、Inventor は 2018 年に AutoCAD と SolidWorks に次いで 3 番目に使用された CAD パッケージでした。 RoboDK では、どの CAD システムを使用していても、あなたの生活を楽にすることに専念しています。 SolidWorks 用の優れ
パーソナライズされた製品は、単なる楽しいものではありません。彼らはあなたのビジネスを次のレベルに引き上げる競争力をあなたに与えることができます.ロボットは、簡単にパーソナライゼーションを実現するのに最適な方法です。自分で試してみることのできる 10 のすばらしいアイデアをご紹介します。 Mastercard と Harvard Business Review の調査レポートによると、私たちは現在パーソナライゼーションの時代に生きています。以前は、パーソナライズされた製品は、企業の製品範囲に追加される楽しいものに過ぎませんでした。ほとんどの人が買うことさえ考えないような風変わりな好奇心。しか
ロボットの約 10% ~ 20% がこのあまり知られていない機能を備えています。準備ができていないと、プログラミングが台無しになる可能性があります。 先日、新しいロボティクスのコンセプトについて学びました... ロボット軸の結合. RoboDK の CEO である Albert Nubiola 氏は次のように述べています。 彼は正しかったです!軸結合についてはほとんど書かれていません。さらに、私は 10 年近くロボット工学の専門家であるという事実にもかかわらず、この少し変わった機能に気づいていませんでした. ロボットの軸結合について聞いたことがなくても、心配はいりません。あなたは一

未来のために学び始める時が来ました…そして未来は今です! 2020 年にロボット工学で成功するために必要な 10 のコア スキルを紹介します。 約 4 年前、正確には 2016 年 1 月に、世界経済フォーラム (WEF) が「2020 年までに成功するために必要なスキルトップ 10」のリストを発表しました。第 4 次産業革命で成功するために必要なコア スキルを特定しました。 当時、2020 年はまだかなり先のことでしたが、未来は今です! WEF のリストには、感情的知性、人材管理、リーダーシップなど、ビジネスのより人間的な側面に関連する多くのスキルを含む、多様なスキルが含まれていまし

今は製造業にとって困難な時期です。新しい 10 年は多くの課題をもたらします。困難な時期を乗り切る方法をいくつかご紹介します。 私たちは興味深い時代に生きています… これは明らかに、「時代は厳しい」という意味の皮肉な呪い (「興味深い時代に生きられますように」) からのフレーズです。 そして、製造業の多くの人にとって、時代は少し難しくなっています。 Deloitte の最近の調査によると、2020 年は厳しい年として始まります。彼らのレポートは次のように始まります: 製造業の成長は、数年間の繁栄に続いて減速し始めています。今年、ロボティクス業界は、RoboGlobal の株価指数が

データ:「製造業の未来の生命線」と呼ぶ人もいますが、ロボット工学により、データはさらに強力になります!データを活用する 11 の優れた方法をご紹介します。 製造会社の将来は、その会社がデータをどれだけうまく処理できるかにかかっています。 言い換えれば、「データの収集と分析が上手にならないと、生き残れないかもしれません。」それが現在の製造業の予測のようです。 MAPI と Deloitte の最近の調査によると、工業メーカーの 85% が、今後 5 年間でスマート ファクトリ イニシアチブが製造業の競争力の主な原動力になると考えています。 MAPI が説明するように、スマート ファクトリ

俊敏性:まだどこかで聞いたことがない場合でも、すぐにわかるでしょう。今年、メーカーは俊敏性を優先しており、ロボットはそれを実現する 1 つの方法です。 この新しい 10 年間に入る製造業の状況を表す言葉を 1 つ選ぶように言われたら、「予測不可能」という言葉がぴったりだと思います。 現在、ものづくりの世界には不安感があります。しかし、不確実性は必ずしも悪いことではありません。 アジャイル製造が 2020 年の競争上の優位性の 1 つになった理由は、予測不可能性にあります。 アジャイル製造は次のように定義できます: 従来の製造業は決して機敏ではありませんでした。産業革命の始まりに始

3D プリントまたはアディティブ マニュファクチャリングは、デジタル ファイルから 3 次元のソリッド オブジェクトを作成するプロセスです。産業用ロボット アームは通常、ピック アンド プレース、溶接、トリミング、機械加工などの用途で使用されますが、3D プリントにロボットを使用できないわけではありません。この概念は、コンクリート 3D プリント用の建設用産業用ロボットにまで及びます。 ロボット 3D プリント システムは、主に建設や建築で人気を博しています。 3D プリント オブジェクトの作成は、アディティブ プロセスを使用して実現されます。アディティブ プロセスでは、オブジェクトが作成され
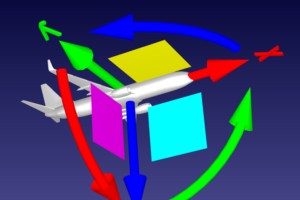
ロボットの回転について理解するのは難しいですよね?オイラー角は首の痛みです。これが、痛みを取り除くための重要な入門書です。 オリエンテーション!彼らは私が私の髪を引き裂きたくなるだけです.座標と回転を使用してロボットの終了ポーズをプログラムする必要があったことがある場合は、私が話していることがわかるでしょう。 一見すると、ロボットのエンド エフェクターのポーズを設定するのは簡単に思えますよね? 「ロボットのツールを これ に移動したい」と言うだけです。 this を指すようにしたい 方向」 直感的に、ツールの向きを正確に把握できます。しかし、正確な数字を使って向きを説明するとなると、突然、

あなたの仕事はオフライン プログラミングに適していますか?オフライン プログラミング ソフトウェアで可能な上位 10 のロボット タスクを見ていきます。 新しいテクノロジーに関する共通の懸念は、「しかし、それは私の固有の状況で機能するでしょうか?」という質問に含まれています。 オフライン プログラミングも例外ではありません。人々はその利点をすぐに理解しますが、自分の特定のタスクには適用できないのではないかと心配することがあります。私たちは彼らの懸念を理解しています。ビジネスは人それぞれで、オフライン プログラミングのようなテクノロジーが自分に最適かどうかを判断するのは難しい場合があります。
どのポストプロセッサーを選べばよいかわからない?完璧なロボット ポスト プロセッサを選択するための 5 つのステップを次に示します。 ポストプロセッサは、オフライン プログラミング ソフトウェアとロボットの間の架け橋です。 適切なポスト プロセッサを選択すると、プログラムはすぐに使用できます。実際のロボットはシミュレーションとまったく同じように動きます。ただし、間違ったポスト プロセッサを選択すると、ロボットが不規則に動いたり、間違った方向に動いたり、まったく動かなかったりするなど、困難な状況に陥ります。 RoboDK には、さまざまなポスト プロセッサが用意されています。ポスト プロセ

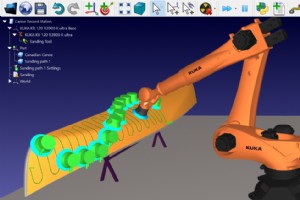
ロボット加工は、CNC マシンを恐竜のやり方に追いやっています!しかし、ロボットは本当に機械加工に適しているのでしょうか? まだ聞いたことがないなら、ロボットは新しい CNC マシンです! 従来の CNC マシンは恐竜の道を歩むことができるでしょうか? (つまり、「CNC World 3」は喜んで見ますが、数百万ドルの映画フランチャイズになるのではなく、絶滅しました) 過去 10 年間で、フライス加工、研磨、バリ取り、切削などの幅広い作業で、従来の工作機械に代わってロボットが使用され始めました。 しかし、ロボット加工は本当に専用工作機械をしのぐことができるのでしょうか?調べてみましょう。
産業用ロボット