工業製造

施設の生産ラインに適した自動化システムを構築するには、適切なソフトウェアを使用することが絶対に重要です。ソフトウェアがなければ、メーカーはロボットをプログラムする方法がありません。 GE のような企業は、メーカーがダウンタイムを最小限に抑えて正確な生産を行うことを保証する産業用ロボット自動化ソフトウェア ソリューションを開発しました。 GE の Web サイトによると、General Electric の略である GE は、メーカーが正確な生産およびプロセス データ アクセスを可能にするヒューマン マシン インターフェイス/監視制御およびデータ取得 (HMI/SCADA) ソフトウェアを開発

今日のテクノロジー主導の世界では、ロボットは製造業で主要な役割を果たしており、ロボットの約半分が溶接用途に使用されています。これらの溶接ロボットの多くは、自動車産業で使用されています。過去 30 年間、自動車用溶接ロボットは業界を変えることに忙殺されてきました。安全性、費用対効果、効率性を高めながら、自動車の組み立てラインを高速化しました。これらが、自動車産業を変える上で自動車用ロボットが最も重要になった主な理由です。 安全 自動車用ロボットは、事故を引き起こすヒューマンエラーの可能性を排除するため、工場をより安全にしました。自動車用ロボットは、熱や化学薬品に耐え、構造物や部品と接触する可能

製造業は非常に競争の激しい分野になっています。製品に対する要求の高まりと複雑性の増大により、企業は限界に追い込まれています。 製造プロセスの変更は困難な場合があります。機械、設備、工具の購入または移動により、初期費用が増加する可能性があります。無駄のないプロセスをより重視することは、海外の競合他社と競争するために不可欠です。 製造上の問題の解決策の 1 つは、ロボット システムを組み込むことです。実行できるタスクの種類が非常に柔軟で、移動が簡単で、製品のスループットが向上します。製造会社に多様なロボットがあると、複数のアプリケーションに使用できるため、コスト削減に役立ちます。それはすべ

産業用ロボットの購入プロセスの初期段階で、購入予定者は産業用ロボットに関するいくつかの要因を決定する必要があります。サイズ、ペイロード容量、再現性、リーチ、およびその他のロボット仕様は、産業用アプリケーションに適したロボット アームを選択する上で重要な役割を果たします。 共通ロボット仕様 ロボットのサイズ (kg):産業用ロボット アームの物理的な寸法と重量を考慮して、ロボット アームが既存のシステムや製造現場にある設備に適合することを確認する必要があります。 最大ペイロード容量 (kg):ロボットの産業用アプリケーションと仕様はしばしば密接に関連しています。部品のサイズと重量を考慮する必

ほとんどの人がロボットについて考えるとき、映画や自動車の組み立てのロボットを思い浮かべますが、私たちの生活に関わる人々について考える人は多くありません。ロボティクスは発明されて以来、産業分野の技術の進歩に貢献してきましたが、今ではヘルスケアを含む新しい分野に挑戦しています。そうです、ロボットは製造業を改善するだけでなく、生活も改善します。気づいているかどうかにかかわらず、私たちの生活には毎日ロボットがいます。 ロボットは、電子メールで誰かに連絡したり、ある場所から別の場所に移動したりするのを簡単にする以外に、どのように私たちの生活を改善できるのか疑問に思っているかもしれません.そうですね、

産業用ロボットは、ロボットのアーム先端ツーリング (EOAT) なしではほとんど役に立ちません。 EOAT は、産業用ロボット (Fanuc ロボットの場合は J6 軸、Motoman ロボットの場合は T 軸) の手首に取り付けられ、ロボットと製品の間の接続を提供します。産業用アプリケーションの自動化を成功させるには、正しい EOAT を選択して構築することが最も重要です。 ステップ 1: 最初のステップは、アプリケーションに最適なロボットのアーム先端ツーリングのタイプを決定することです。グリッパーは、多くの場合、マテリアル ハンドリング アプリケーションで使用されます。溶接トーチと溶接ガ

小規模なプロジェクトや床面積が限られている場合は、テーブル トップ ロボットが最適です。 他のほとんどの産業用ロボットと同じようにさまざまなアプリケーションを実行でき、設置面積と重量が削減されているため、ロボットをテーブルトップに取り付けることができます。 テーブル トップ ロボットには、主にゲート型とカンチレバーの 2 種類があります。ゲート付きロボットは、製品がゲートを通ってスライドして作業できるように、2 本の脚でサポート構造に取り付けられます。カンチレバー テーブル トップ ロボットは、1 本の脚だけで支持構造に取り付けられるため、作業スペースが増え、ロボット アームの周りで製

ファクトリ オートメーションの成長は、テクノロジーの急増により、過去 10 年間で急速に進んでいます。この成長により、自動化への期待が高まり、業界と新しいイノベーションによって満たされています。すべての新しい開発により、自動化の未来を垣間見ることはエキサイティングです 保持します。 ファクトリー オートメーションの成長 産業オートメーションには、その成長につながった多くの新しい開発がありました。プログラマブル ロジック コントローラ (PLC) の開発により、ロボットのプログラミングがより簡単で信頼性の高いものになりました。 PLC の簡単なプログラミングは、頻繁に再プログラミングを必要

ガラス製造の自動化は段階的なプロセスであり、ガラス ハンドリング ロボットの組み込みにより効率化されています。 ミキシング ガラス処理の自動化の最初のステップは、原料をバッチ ハウスに移し、サイロに保管することです。その後、材料は計量され、炉の上にあるミキサーに送られます。ここから原材料は、Motoman UP20-6 などのマテリアル ハンドリング ロボットによってコンベア ベルトに運ばれ、プロセスの「ホット エンド」の炉に運ばれます。 暖房 ガラス製造における加熱工程は、しばしば「ホットエンド」と呼ばれます。原材料は一定の速度でゆっくりと炉内に供給され、溶融ガラスに変わります。炉は平均

ロボットの使用は製造業者に多くのメリットをもたらしましたが、それらのメリットを引き続き享受するためには、ロボット機器のメンテナンス プログラムを実施する必要があります。ロボットのメンテナンス プログラムの最も一般的な形態は、予防メンテナンスです。予防保全とは、不測の故障を防ぎ、ロボットの寿命を延ばすことを目的とした、設備や機器の計画的なメンテナンスです。これらのプログラムは、ロボットのパフォーマンスの信頼性を維持するために重要です。 予防保守とは 予防保守には、塗装、潤滑、クリーニング、調整、およびマイナーな部品交換によるロボット機器の寿命の延長が含まれます。発生する可能性のある問題を修正ま

過去 50 ~ 60 年間、コンピューターは自動化によって製造をより生産的で合理化されたプロセスに移行するのに役立ってきました。オートメーション、または産業オートメーションには、コンピュータを使用して産業機械とそのプロセスを制御することが含まれます。 産業オートメーションの主な利点 自動化の主な利点は、施設の生産性を向上させることです。労働力の削減、再現性、廃棄物の削減、品質管理の強化、および既存のビジネス システムとの統合により、長期的なコストが削減され、製品の生産量と収益が増加します。欠点としては、テクノロジーを購入する際の初期費用が高く、保守費用が高くなることが挙げられます。 何十年

ロボット シミュレーションは、ロボット システムの設計およびプログラミングの問題を解決するのに理想的です。これは、シミュレーションの最も一般的な 2 つの形式である離散イベントと連続シミュレーションの組み合わせです。何年にもわたって、ロボット技術の進歩により、シミュレーションの利点は非常に大きくなりました。 シミュレーションの利点 ロボット シミュレーションは自動化システムの設計に最適で、CAD システムよりもはるかに有利です。 シミュレーションは、自動化のためのより高品質な設計を生み出します コンセプトとデザインのオープンなコミュニケーションを通じて、同期したグループ製造が可能になり

自動化とは、さまざまなコンピューターおよび機械支援タスクを使用して、生産性を向上させ、ビジネスをより簡単に行う方法を作成する方法です。さまざまなタイプの自動化が、さまざまなタイプの業界で一般的に使用されています。たとえば、自動化されたメーターとポンプは、消費者が毎日ガスを汲み上げるのを支援します。産業環境では、さまざまなタイプの自動化が、パート サイクル時間の短縮、製品の高品質化、労働者の安全性の向上などのメリットを企業にもたらします。 産業オートメーション テクノロジーを使用して、反復的、危険、または人間には適さない可能性があるタスクを実行することは、産業オートメーションとして知られていま

アジャイル生産はビジネス コンセプトとして始まりましたが、将来の生産の世界を変える可能性のある新しいものづくりの形になりました。かつてはリーン生産方式が生産ラインを支配していましたが、今では、かつては大量の注文、生産能力、および在庫を特徴としていた従来の製造方式に挑戦する新たな敵がいます。 定義: アジャイル製造とは、コストと品質を管理しながら、顧客のニーズと市場の変化に迅速に対応するために必要なプロセス、ツール、およびトレーニングです。これには、受注生産または受注構成の生産プロセスに速度と柔軟性を組み込むための戦略が含まれます。本番環境でのアジャイルの理想は、切り替え時間と中断を最小限にす
消費者向けおよび産業用製品の技術が進歩するにつれて、ロボットの技術とこれらの製品を製造するプロセスも進歩します。産業用ロボットは、今日目にする大小を問わず、多くの製品の生産と品質において大きな役割を果たしています。 産業用ロボット設計の焦点の変化 ロボット工学の進歩は、基本的な概念を改善し、設計は、Fanuc や Motoman を含む多くの主要なロボット メーカーによって習得されています。 6 軸の産業用ロボット アームは、多くの産業用アプリケーションの標準となっています。一部のアプリケーションおよび製造計画では、目的の結果に応じて、軸の増減が有利になる場合があります。たとえば、重いパレタ

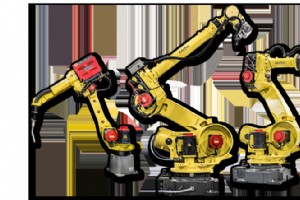
自動車産業における産業用ロボット 今日、ほとんどの産業用ロボットは自動車産業で使用されています。 50% もの従業員が、アルミニウム製の自動車の製造に使用されるような組立ラインで働いています。ロボットは、人間よりも正確で効率的に作業できるため、自動車製造において有益です。ロボットは、メーカーにとってより少ない費用で一貫した製品を生産できます。産業用ロボットは、どれだけ長く働いても常に同じ量の労力を費やします。実際、休憩、休暇、病欠を必要としないため、24 時間体制で作業でき、生産プロセスがスピードアップします。また、人間にとって危険な作業を行うことで、労働者の怪我を減らすのにも役立ちます。ロ

エンド エフェクタとしても知られる EOA ツーリングは、ロボット アームの端にあるパーツが環境と相互作用するロボット ツール センターです。アーム ツーリング デバイスの端部はアプリケーションによって異なり、ロボットの不可欠なコンポーネントです。 EOA パーツの選択は、自動化の最も難しい側面の 1 つですが、エンド ユーザーのニーズを理解すると簡単になります。 動力源 EOA パーツを選択する最初のステップは、電源を選択することです。 EOAT は、電気、油圧、または空気圧で作動します。 空気動力源は、重量対電力比が優れているため、包装業界で人気があります。それらはすぐに入手でき、強力
プラズマ切断は、強化されたロボット技術による新興分野です。プラズマ切断は、1980 年代にプラズマ溶接から発展したもので、かつては高すぎると考えられていました。今日では、製品を生産するための費用対効果が高く効率的な方法になっています。プラズマ カッターは、ハンドヘルド デバイスから、ロボット アームの EOAT としての大型カッターにまで及び、正確な切断を作成します。 プラズマ切断の原理 プラズマ切断の原理は、物質の 4 つの状態に基づいています。ほとんどの人は、最初の 3 つの統計、固体、液体、気体に精通しています。しかし、プラズマは 4 番目の状態として発見されました。 プラズマ切

iRvision は、Fanuc の使いやすいロボット ビジョン システムです。ビジョン システムは、すべての Fanuc R-30iA コントローラで使用できます。カメラとケーブルのみを使用し、エラー防止とともに部品の位置を特定できます。 iRvision は、最適なパフォーマンスのための追加オプションを提供するプラットフォームとして 2D ガイダンスを使用します。 特徴: 2D ガイダンス - iRVision は、ビジョン システムのメイン プラットフォームとして 2D ガイダンスを使用しています。 2D はパーツの位置を正確に特定できるため、そのような機能のために余分な機器を使用する

機械部品の積み降ろしは骨の折れる作業です。積み込みロボットは、生産性を向上させ、生産量を増やしながら、この気が遠くなるような骨の折れる仕事を引き継ぐことができます。ファナックは、ローディング ロボットのモデルをいくつか提供しています。 Fanuc M-710iT 工作機械ローディング ロボットは、70 kg のペイロードを備え、機械の生産性を 30% 向上させることができます。これはトップ ローダー ロボットです。つまり、部品を傾けてクーラントを除去し、垂直または水平のいずれかの形式で部品をロードできます。また、フロアスペースも解放されます。このモデルは、工作機械のアンロードに使用されるデュ
産業用ロボット